Изобретение относится к технической гидроакустике, а конкретнее - к технике определения глубины моря.
В настоящее время глубина моря с погруженного аппарата определяется с помощью эхолотов - гидроакустических судовых навигационных приборов, принцип действия которых основан на использовании излучения акустических сигналов, облучающих дно моря. Однако работающий эхолот демаскирует аппарат и акустически загрязняет море. В связи с этим поиск путей определения глубины моря пассивными способами (без использования активного излучения) представляется актуальным.
Известные способы измерения глубины гидроакустическими способами основаны на излучении зондирующих сигналов (импульсов) в направлении дна, приеме отраженных от дна сигналов, измерении промежутка времени t между моментом излучения зондирующего импульса и моментом приема отраженного от дна импульса и на определении глубины моря
H =  + h (1) где h - глубина погружения;
+ h (1) где h - глубина погружения;
с - средняя скорость звука по глубине [1].
В качестве способа-прототипа целесообразно использовать способ, используемый в навигационных эхолотах. Этот способ основан на излучении акустического импульса и приеме его после отражения от дна с помощью направленных излучающих и приемных антенн. Для повышения точности на малых глубинах осуществляют излучение коротких акустических импульсов, а на больших глубинах излучают импульсы большой длительности и используют низкие частоты. Глубина моря Н определяется по формуле (1) по результатам измерения времени t между посылкой и приемом импульса [2].
Недостатком способа-прототипа является наличие активного излучения, демаскирующего подводный объект.
В качестве устройства-прототипа целесообразно принять конструкцию навигационного эхолота НЭЛ-10 [3].
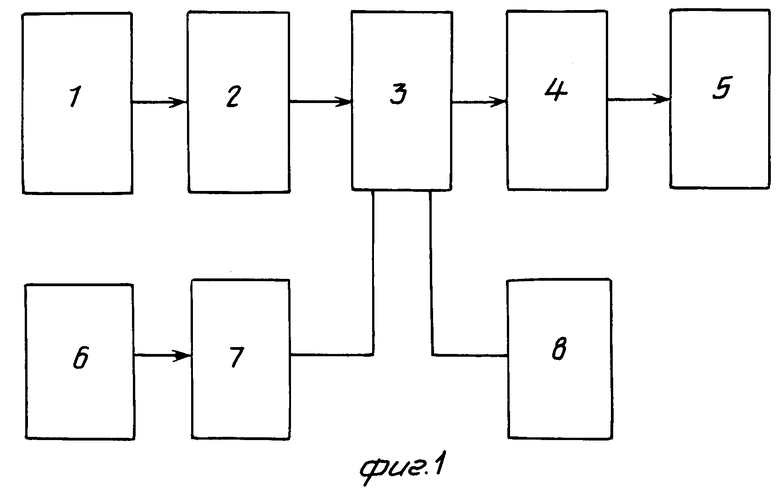
Устройство-прототип (фиг.1) содержит последовательно соединенные излучающую антенну, генератор импульсов, блок измерения времени t, вычислитель Н, второй вход которого соединен с глубиномером аппарата, индикатор, также содержит последовательно соединенные приемную антенну, акустически связанную с излучающей антенной, блок усиления, фильтрации и формирования характеристик направленности, выход которого соединен с третьим входом блока, также содержит блок памяти скорости звука, выход которого соединен с вторым входом вычислителя.
Недостатком устройства-прототипа является использование активного излучения, акустически загрязняющего морскую среду и демаскирующего аппарат.
Целью изобретения является определение глубины моря с погруженного аппарата без использования активной посылки.
Для достижения цели при определении глубины моря на погруженном аппарате, включающем прием акустического сигнала в направлении от дна моря, преобразовании акустических колебаний в электрические и расчет глубины моря с учетом данных о глубине погружения h и скорости пробега звуковых волн С, вводят новые операции, в том числе в качестве акустического сигнала используют динамический шум моря, превышающий по уровню шумы корабельного происхождения, дополнительно принимают шумы моря от поверхности моря, производят пространственную фильтрацию принятых от поверхности и дна моря шумов, выделяя шумы моря от участков поверхности и дна непосредственно над и под погруженным аппаратом, осуществляют взаимоспектральную обработку преобразованных в электрические, принятых в направлении от дна и поверхности шумов моря, выделяя действительную Re[Gпд(f)] и мнимую Im[Gпд(f)] части взаимного энергетического спектра Gпд, и определяют глубину моря Н по формуле
H = h + 
 arctg
arctg df где fв, fн - верхняя и нижняя частоты диапазона.
df где fв, fн - верхняя и нижняя частоты диапазона.
Угол, в котором производят прием шума от поверхности моря, может быть выбран из соотношения
αm= 180°-8arc Cos где си, со - скорость звука на поверхности моря и на горизонте расположения аппарата, а угол приема от дна моря βm целесообразно определить неравенством
где си, со - скорость звука на поверхности моря и на горизонте расположения аппарата, а угол приема от дна моря βm целесообразно определить неравенством
180°-6arc Cos ≥ βm>αm+arc cos
≥ βm>αm+arc cos где сд - скорость звука у дна моря.
где сд - скорость звука у дна моря.
Число периодограмм n при вычислении действительной и мнимой составляющих взаимного энергетического спектра
n >  где εn - величина средней квадратической погрешности глубиномера, которым измеряют глубину погружения аппарата, а длительность реализации анализируемого шумового процесса выбирают не более периода квазистационарности шумов моря.
где εn - величина средней квадратической погрешности глубиномера, которым измеряют глубину погружения аппарата, а длительность реализации анализируемого шумового процесса выбирают не более периода квазистационарности шумов моря.
Предложенный способ реализуется с помощью устройства для измерения глубины моря, содержащего первую приемную антенну, главный максимум характеристики направленности которой ориентирован на дно моря, первый блок усиления фильтрации и формирования характеристик направленности, вычислитель глубины моря, второй вход которого соединен с измерителем глубины погружения аппарата, индикатор глубины, блок памяти скорости звука, выход которого соединен с третьим входом вычислителя скорости звука. Для решения поставленной задачи в устройство введены последовательно соединенные вторая приемная антенна, главный максимум характеристики направленности которой ориентирован на поверхность моря, второй блок усиления, фильтрации и формирования характеристик направленности, аналого-цифровой преобразователь, второй вход которого соединен с выходом первого блока усиления, фильтрации и формирования характеристик направленности, аналого-цифровой преобразователь, второй вход которого соединен с выходом первого блока усиления фильтрации и формирования характеристики направленности, анализатор взаимного энергетического спектра, первый и второй выходы которого соединены с вычислителем глубины моря, а также блок управления, синхровходы которого соединены соответственно с синхровходами аналого-цифрового преобразователя, анализатора, блока памяти, вычислителя глубины моря и индикатора.
Вычислитель глубины моря может содержать последовательно соединенные делитель, первый и второй входы которого соединены с первым и вторым выходами анализатора взаимного энергетического спектра, вычислитель арктангенса, интегратор, второй делитель, второй вход которого соединен с блоком памяти, второй вход которого соединен с измерителем глубины погружения аппарата, а выход - с индикатором, блок местного управления, синхровыходы которого соединены соответственно с синхровходами первого делителя, вычислителя арктангенса, интегратора, второго делителя, сумматора, а синхровход соединен с синхровходом блока управления глубины моря.
Существенные отличительные признаки предлагаемого способа основаны на новом принципе измерения глубины моря без излучения активной посылки и с использованием только приема шума моря. Ими являются: прием динамического шума моря одновременно от дна и поверхности моря; пространственная фильтрация для выделения шумов как прямых, так и первоотраженных только от охватываемого характеристикой направленности участка поверхности моря; взаимоспектральный анализ между шумами моря от поверхности и шумами моря от дна; выбор диапазона рабочих частот; выбор числа усреднений при вычислении составляющих взаимного энергетического спектра.
Таким образом, в предлагаемом способе искусственный акустический сигнал (активная посылка эхолокатора) заменяется обработкой естественного динамического шума моря, обусловленного явлениями на поверхности моря. При этом приходится вести операции, специфически воздействующие на материальный объект - шум моря.
Новыми в предлагаемом устройстве являются вновь введенные блоки: вторая приемная гидроакустическая антенна, главным максимумом ориентированная на поверхность моря; анализатор взаимного энергетического спектра; новое построение блока определения глубины моря Н.
Новыми являются и связи как между блоками устройства-прототипа, так и между вновь введенными блоками.
Для подтверждения возможности практического осуществления и причинно-следственных связей операции предлагаемого способа приведем его обоснование.
Результаты экспериментальных исследований различных характеристик поля динамических шумов в океане однозначно свидетельствуют о том, что источники шума распределены у поверхности воды. То обстоятельство, что на частотах от 1-2 до 10 кГц шум приходит главным образом с вертикальных направлений, позволяет предположить, что поверхность моря (каков бы ни был механизм образования шума на ней) излучает шум по преимуществу вниз и что каждая малая площадка этой поверхности обладает собственной характеристикой направленности в вертикальной плоскости.
Экспериментальные исследования свидетельствуют о том, что направленность поверхностных источников в подавляющем большинстве случаев в диапазоне частот от 3 до 6 кГц можно представить в виде
I=IoCos2θ , где Io - интенсивность шума, излучаемого малой площадкой на поверхности моря в направлении вертикально вниз (θ=0) . Это согласуется с гипотезой о дипольном источнике, который формируется реальным источником и его зеркальным отображением в поверхности моря (мнимым источником). На частотах ниже 2-3 кГц более часто наблюдается направленность типа Cosmθ при m = 0,1.
В предлагаемом способе используется выделение информации о запаздывании отраженного от дна шума моря по сравнению с приходящим от поверхности динамическим шумом. Это приводит к целесообразности в качестве нижней частоты используемого рабочего диапазона частот выбрать частоту порядка 3 кГц.
Ограничение частотой 3 кГц нижней границы рабочего диапазона приема динамического шума моря диктуется рядом обстоятельств. Во-первых, на более низких частотах могут превалировать шумы другого происхождения, возникающие не на участке поверхности моря над погруженным аппаратом, в частности шумы удаленного судоходства, преобладающие на частотах ниже 300-500 Гц, биологические шумы рыб, имеющие максимумы на частотах от 200 Гц до 1 кГц, шумы скоплений мидий, имеющие наибольшую энергию в полосе частот от 1 до 3 кГц, шумы морских ежей, имеющие максимум в районе 1,5 кГц, шумы сейсмического происхождения, характерные в основном на низких звуковых и инфразвуковых частотах и др. Во-вторых, на более низких частотах для обеспечения направленности нужны антенны больших габаритов, размещение которых на аппаратах затруднительно. Уровень шумов при измерении в полосе частот 1 Гц с ростом частоты уменьшается в среднем на 5 дБ на октаву. Увеличение волнения моря приводит к возрастанию уровней практически одинаково во всем диапазоне частот. Целесообразно использовать для целей настоящей заявки одну октаву. Поэтому нами выбран частотный диапазон от 3 до 6 кГц.
Ограничение частотой 6 кГц верхней границы рабочего диапазона приема диктуется следующими обстоятельствами. В предлагаемом способе используется шум моря, отраженный от дна моря. Коэффициент отражения звука от дна снижается с ростом частоты.
Кроме того, частотная зависимость поглощения звука ( β = 4,1˙10-6f3/2 неп/м, f в кГц) приводит к тому, что на частотах выше 6 кГц интенсивность шумов становится малой и не обеспечивается превышение этого шума над помехами корабельного происхождения на аппарате.
Рассмотрим выбор углов, в которых целесообразно принимать шум моря.
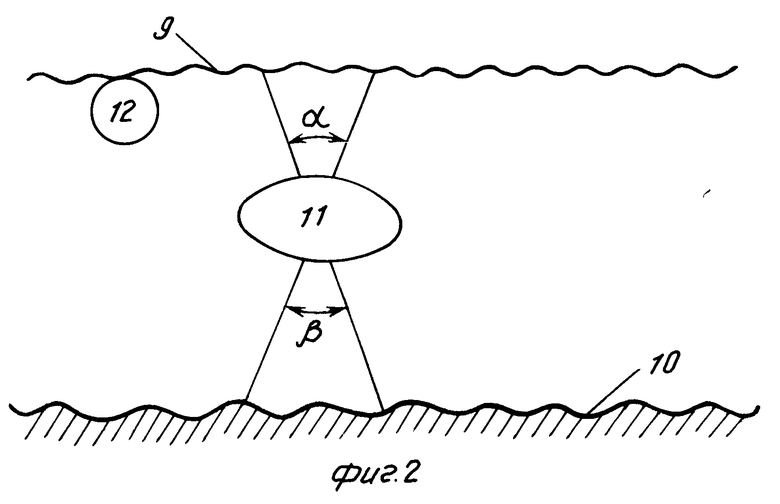
Известно, что в пределах углов, не превышающих 15-20о, прием с поверхности практически равномерен по поверхности (см. фиг.2).
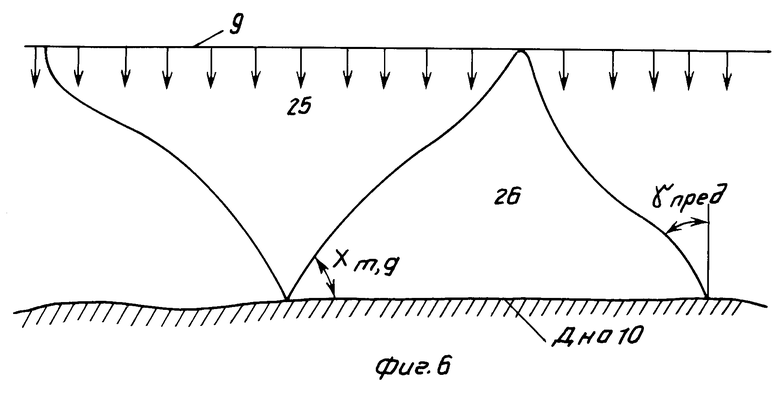
Целесообразность выбора угла α определяется тем, что угол α должен быть меньше 180о - 2χm,n где угол скольжения χm,n (фиг.6) определяет такой угол, при котором луч коснется поверхности воды.
χm,n= arc Cos где сп - скорость звука у поверхности;
где сп - скорость звука у поверхности;
со - скорость звука на горизонте расположения аппарата. Приближенно
χm= где Δc=cп-со . Таким образом, следует выбрать
где Δc=cп-со . Таким образом, следует выбрать
α<<180o-2χm,n В этом случае, в частности исключается прием шумов дальнего судоходства, которые приходят под малыми углами к горизонту. Для уточнения понятия "много меньше" было проведено численное моделирование для типовых гидроакустических ситуаций, которое показано, что необходимо выбирать
α=180o-8χm,n
В подавляющем большинстве случаев χm,n порядка 18о, значит α примерно 36о. Угол раствора характеристики направленности β приема шума моря со стороны дна моря целесообразно, с одной стороны, выбрать таким, чтобы принять весь отраженный шум, дошедший с поверхности под углом Δβ таким, чтобы cos2θ был больше 0,85, что соответствует углу β > 22,8о. Другое ограничение на угол β накладывает требование приема сигналов только от участка поверхности моря, расположенного в пределах угла α . Для этого необходимо, чтобы не было приема шума моря, отраженного дном после поступления шума от других зон (фиг.6,7). Как видно из этих фигур, необходимо рассматривать углы ( γпред , где γпред - критический угол, начиная с которого отражение становится полным). При средней скорости звука в грунте предельный угол определяется выражением
γпред= arc Sin
Для того, чтобы луч коснулся дна, необходимо, чтобы угол χm,д(фиг.6) имел величину
χm,д= arc Cos где сд - скорость звука у дна моря. Следовательно, необходимо выбрать
где сд - скорость звука у дна моря. Следовательно, необходимо выбрать
β<<180o-2χm,д С учетом сказанного, необходимо взять минимальное значение угла β , определенное из перечисленных выше условий.
Таким образом, условия на углы α и β определены таким образом, чтобы пространственно отфильтровывать только динамический шум от выбранного участка поверхности моря. Для уточнения понятия "много меньше" было проведено численное моделирование для типовых гидролого-акустических ситуаций, которое показало, что необходимо выбирать
β≅180o-6χm,д С другой стороны, необходимо для приема шума моря с "освещенной" характеристикой направленности площадки шума моря выбирать
β > α + arccos
При такой организации приема шумов моря приближенно можно считать интенсивность шума, принятого от поверхности,
Iп=  где Iш.м - интенсивность шума моря при приеме ненаправленным приемником;
где Iш.м - интенсивность шума моря при приеме ненаправленным приемником;
Кп - коэффициент концентрации приема от поверхности с помощью направленной гидроакустической антенны. Интенсивность шума, принятого от дна, можно приближенно принять равной
Iд=  · Vэфф· exp[-β1(H-h)] где h - глубина погружения аппарата;
· Vэфф· exp[-β1(H-h)] где h - глубина погружения аппарата;
Кд - коэффициент концентрации приема шума с направления дна. Видно, что интенсивность шума при известном значении h несет информацию о глубине моря Н. Однако использовать для определения Н эти последние два соотношения невозможно, так как неизвестно значение эффективной величины отражения от дна Vэфф и значение коэффициента затухания звука β1 .
Воспользуемся тем, что шум моря, отраженный от дна, опаздывает на время
tзад= 2 где с - средняя скорость звука в среде;
где с - средняя скорость звука в среде;
h - глубина погружения аппарата. Будем осуществлять взаимоспектральный анализ сигналов, принимаемых от поверхности и от дна моря, с выделением действительной части взаимного спектра Gпд(f) в виде Re[Gпд(f) и мнимой части взаимного спектра Im(Gпд(f)]. Тогда относительная задержка двух шумовых сигналов определится как
tзад=  arctg
arctg что и решает поставленную задачу, так как формула
что и решает поставленную задачу, так как формула
H = h +  arctg
arctg позволяет определить глубину моря в районе плавания аппарата. Для повышения точности обычно производят интегрирование в полосе частот приема шума моря по частоте.
позволяет определить глубину моря в районе плавания аппарата. Для повышения точности обычно производят интегрирование в полосе частот приема шума моря по частоте.
Последним условием, накладываемым на реализацию способа, является необходимость, чтобы шум моря превышал уровень помех корабельного происхождения, обусловленных эффектами движения и жизнеобитания аппарата, то есть чтобы соблюдалось условие
Iш.м >> Iк.п в рабочем диапазоне частот, где Iш.м - как и ранее, интенсивность шума моря, приведенная к ненаправленному приему шума моря; Iк.п - интенсивность корабельного шума, приведенного к ненаправленному приему с использованием коэффициента концентрации приемной антенны. Для современных аппаратов существенное превышение шума моря над корабельной помехой наблюдается при волнении моря 2 и более балла. Акустическое давление шума океана в рассматриваемом нами диапазоне частот хорошо аппроксимируется формулой
Pш.м(f) = 1,8˙10-2v1,5 ˙ f-0,84, где v - средняя скорость ветра над акваторией;
f - частота, кГц. Учитывая, что корабельная помеха имеет спад спектра на 6 дБ на октаву с ростом частоты, можно записать
Pк.п(f) = Pо,к.п ˙ f-1, где Po,к.п - акустическое давление корабельных помех, приведенное к ненаправленному приему, частоте 1 кГц и полосе 1 Гц. Условие
Pш.м(f) >> Pк.п(f) может быть переписано в виде ≫ 1,8·10
≫ 1,8·10 f0,16 что строго определяет поставленное условие.
f0,16 что строго определяет поставленное условие.
Для определения средней квадратической погрешности измерения глубины моря Н произведем вычисление по формуле
εн=  где εh - средняя квадратическая погрешность определения глубины h погружения аппарата с помощью глубиномера, установленного на этом аппарате;
где εh - средняя квадратическая погрешность определения глубины h погружения аппарата с помощью глубиномера, установленного на этом аппарате;
εGп.д - средняя квадратическая погрешность измерения действительной Re[Gп.д(f)] и мнимой Im[Gп.д(f)] частей взаимного энергетического спектра сигналов - шумов моря, принимаемых от поверхности и дна моря.
На практике величина определения глубины моря осуществляется с погрешностью от εh = 0,001 до εh = 0,05. Погрешность определения действительной и мнимой частей взаимного спектра определяется усредняемым ансамблем реализации n в спектроанализаторе и имеет вид =
=  Целесообразно выбрать число усредняемых реализаций n таким образом, чтобы
Целесообразно выбрать число усредняемых реализаций n таким образом, чтобы
2 < ε
< ε
n >  С другой стороны, шум океана - нестационарный случайный процесс, который можно считать квазистационарным при продолжительностях 1-3 мин на частотах до 8 кГц.
С другой стороны, шум океана - нестационарный случайный процесс, который можно считать квазистационарным при продолжительностях 1-3 мин на частотах до 8 кГц.
Известно, что нестационарность шума начинает сказываться в районах с неустойчивыми условиями при длительностях реализаций шумового процесса 3-5 мин. Поэтому анализировать необходимо реализации шума не более 3 мин. Для величины εh= 0,05 значение n должно быть большим 2˙103. Обычно выбирают n = 2048. Формулу для средней квадратической погрешности удобно представить в более простом виде
εн=  В суммарную погрешность определения глубины моря Н дополнительно войдет и погрешность εн.м метода измерений настоящим способом. Эта погрешность обусловлена упрощениями, принятыми при теоретическом рассмотрении и заключающимися в неучете кавитационного шума моря, хотя и малого на используемых частотах, но все же присутствующего, также обусловлена неровностями дна моря, что может привести к неполной пространственной отстройке от шумов моря от других участков поверхности моря и дна. Причем эти погрешности метода проявляются как случайные. Таким образом, суммарная погрешность измерений εн.Σ должна быть представлена в виде
В суммарную погрешность определения глубины моря Н дополнительно войдет и погрешность εн.м метода измерений настоящим способом. Эта погрешность обусловлена упрощениями, принятыми при теоретическом рассмотрении и заключающимися в неучете кавитационного шума моря, хотя и малого на используемых частотах, но все же присутствующего, также обусловлена неровностями дна моря, что может привести к неполной пространственной отстройке от шумов моря от других участков поверхности моря и дна. Причем эти погрешности метода проявляются как случайные. Таким образом, суммарная погрешность измерений εн.Σ должна быть представлена в виде
εн,Σ=  На практике εн,м соизмерима с εн.
На практике εн,м соизмерима с εн.
Таким образом, практическое осуществление предлагаемого способа можно считать доказанным.
На фиг.1 приведена блок-схема устройства-прототипа, где 1 - излучающая гидроакустическая антенна, ориентированная главным максимумом характеристики направленности на дно, 2 - генератор импульсов, 3 - блок измерения времени t запаздывания отраженного импульса по сравнению с зондирующим импульсом, 4 - вычислитель глубины Н моря, 5 - индикатор и регистратор глубины моря, 6 - приемная гидроакустическая антенна, ориентированная главным максимумом характеристики направленности в направлении дна моря, 7 - блок усиления, фильтрации и формирования характеристики направленности (ХН), 8 - блок памяти скорости звука.
На фиг.2 приведено пояснение к операциям предлагаемого способа, где 9 - поверхность моря, 10 - дно моря, 11 - аппарат, 12 - направленность поверхности источников, углы α и β - соответственно растворы главных максимумов характеристик направленности приема шумов моря от поверхности и от дна моря.
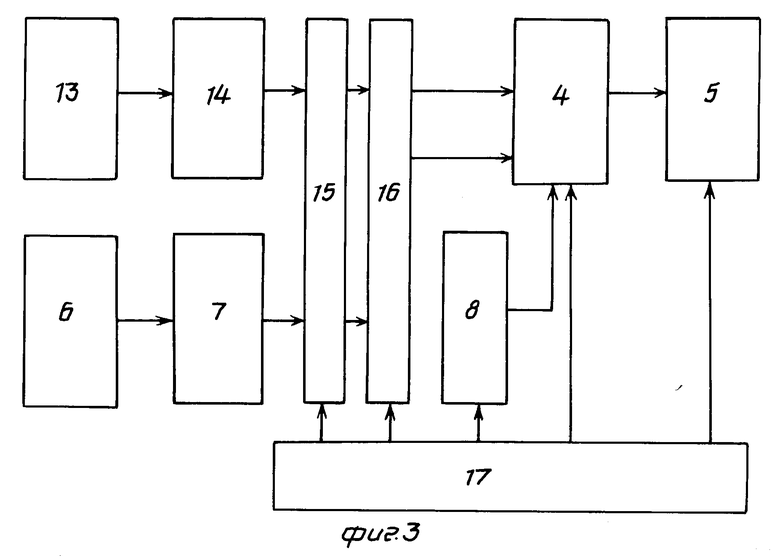
На фиг. 3 приведена блок-схема предлагаемого устройства для реализации способа-глубиномера, где 13 - вторая приемная гидроакустическая антенна, ориентированная главным максимумом характеристики направленности в направлении поверхности моря, 14 - второй блок усиления, фильтрации и формирования характеристики направленности (ХН), 15 - двухканальный аналого-цифровой преобразователь (АЦП), 16 - анализатор взаимного энергетического спектра, 17 - блок управления глубиномером.
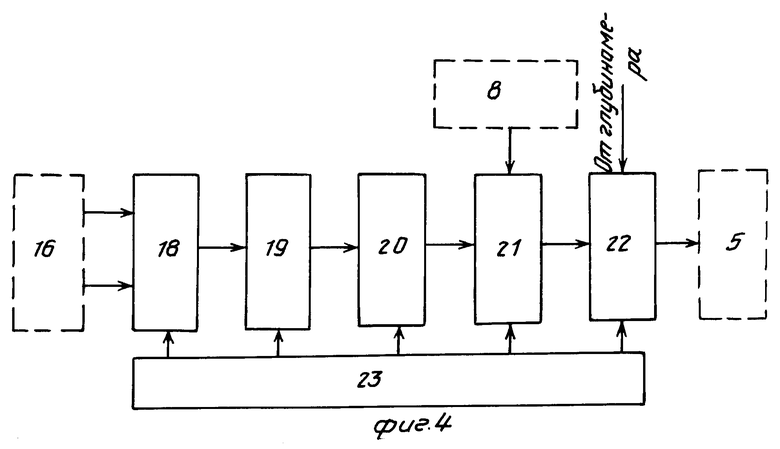
На фиг.4 приведена блок-схема вычислителя 4 глубины моря предлагаемого глубиномера, где 18 - делитель, 19 - вычислитель арктангенса, 20 - интегратор, 21 - делитель, 22 - сумматор, 23 - блок местного управления вычислителя глубины моря.
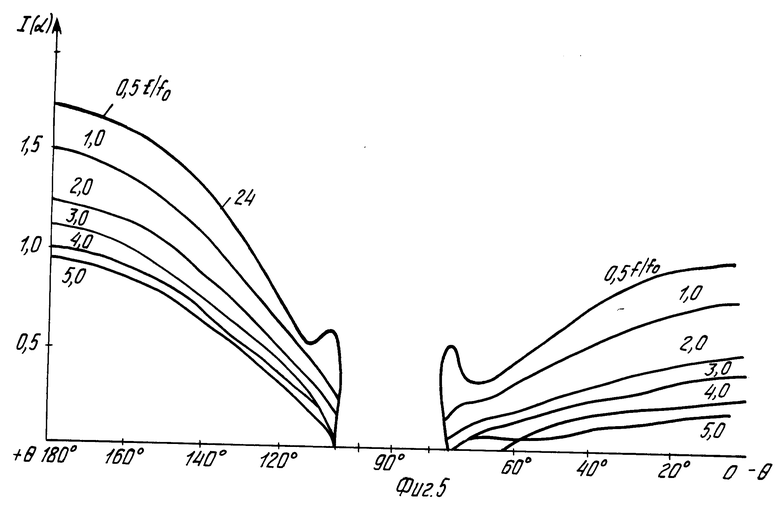
На фиг.5 приведено пространственное распределение интенсивности принимаемого шума моря I(θ), где 24 - распределение интенсивности в вертикальной плоскости, за 0о принято направление на дно моря, за 90о - горизонт, за 180о - направление на поверхность моря.
На фиг.6 приведена типовая лучевая структура приема шумов моря, где 25 - зона приема прямых лучей, 26 - зона приема лучей, однократно отраженных от дна моря, углы χm,n и χm,д - соответственно углы скольжения у поверхности и дна моря, γпред - критический угол, в пределах которого отражение от дна моря становится практически полным.
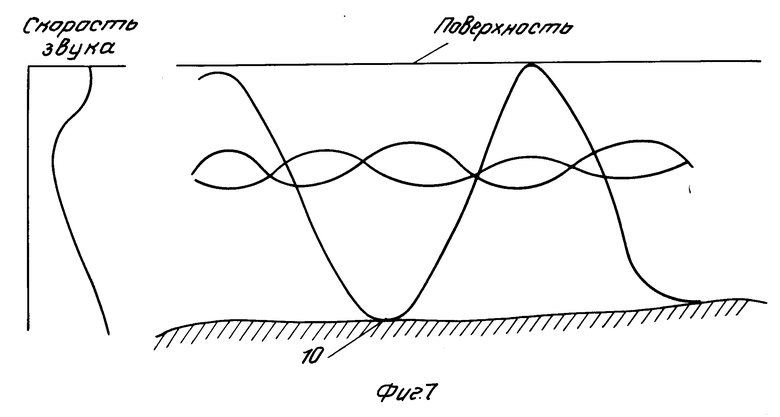
На фиг. 7 приведена типовая лучевая структура при наличии подводного звукового канала.
П р и м е р. Осуществлялось определение глубины моря с аппарата, погруженного на горизонт h = 110 м. Производился прием динамического шума моря в диапазоне частот от 3,0 до 6 кГц. Причем этот прием выполняли одновременно от поверхности и дна моря, пространственно отфильтровывая эти шумы с помощью двух гидроакустических антенн, главный максимум одной из которых был ориентирован на поверхность, а другой - на дно моря. Растворы главных максимумов характеристик направленности по половинному уровню по энергии составляли соответственно α = 60о и β = 85о. При этом были приняты наиболее типичные значения углов 
 15°. Осуществлялся взаимный спектральный анализ шумов моря, принятых отдельно от поверхности и дна моря. Исходя из погрешности глубиномера, число осредняемых реализаций взаимного спектра было выбрано n = 1024. После выделения мнимой и действительной частей взаимного энергетического спектра была определена глубина моря Н = 275 м с абсолютной погрешностью ΔH=±17 м (определенной по сопоставлению с данными прецизионного эхолота). Таким образом, предложенный способ решает поставленную задачу.
15°. Осуществлялся взаимный спектральный анализ шумов моря, принятых отдельно от поверхности и дна моря. Исходя из погрешности глубиномера, число осредняемых реализаций взаимного спектра было выбрано n = 1024. После выделения мнимой и действительной частей взаимного энергетического спектра была определена глубина моря Н = 275 м с абсолютной погрешностью ΔH=±17 м (определенной по сопоставлению с данными прецизионного эхолота). Таким образом, предложенный способ решает поставленную задачу.
Устройство, реализующее способ - глубиномер содержит параллельно-последовательно соединенные первую 6 и вторую 13 приемные гидроакустические антенны, первый 7 и второй 14 блоки усиления, фильтрации и формирования характеристик направленности, аналого-цифровой преобразователь 15, анализатор 16 взаимного энергетического спектра, вычислитель 4 глубины моря, третий вход которого соединен с глубиномером, индикатор 5, также содержит блок 8 памяти скорости звука, выход которого соединен с четвертым входом вычислителя 4, блок 17 управления, синхровходы которого соединены соответственно с синхровходами АЦП 15, анализатора 16, блока памяти, вычислителя 4, индикатора 5.
Вычислитель 4 глубины моря выполнен в виде последовательно соединенных делителя 18, первый и второй входы которого соединены соответственно с первым и вторым выходами анализатора 16, вычислителя 19 арктангенса, интегратора 20, делителя 21, второй вход которого соединен с блоком 8 памяти, сумматора 22, второй вход которого соединен с глубиномером, а выход - с входом индикатора 5, также имеется блок 23 местного управления, синхровходы которого соединены соответственно с синхровходами делителя 18, вычислителя 19, интегратора 20, делителя 21 и сумматора 22.
Блоки 17 и 23 управления построены в виде последовательно соединенных генераторов тактовых сигналов и линий задержек. Ввиду их простоты блок-схемы не приводятся. Во всех цифровых блоках имеются местные управляющие устройства. Ввиду того, что эти блоки известны из практики гидроакустики, подробно они не освещаются, чтобы не загромождать заявку избыточной информацией. Блок 8 памяти скорости звука обычно имеет ручной ввод данных о скорости звука. Однако могут быть варианты построения, когда данные от скоростемера поступают непосредственно в блок 8. Также могут быть разные варианты связи с глубиномером. Данные от глубиномера могут поступать непосредственно в ОЗУ вычислителя 4, имеющегося в сумматоре 22. В другом варианте может иметься буферный блок памяти данных о глубине. Тогда требуется в блоке 23 местного управления еще один синхровыход. В некоторых видах глубиномеров информация о глубине поступает в аналоговом виде.
Работа устройства измерения глубины моря осуществляется следующим образом. Первой антенной 6 ведется прием шума моря, отраженного от дна моря, второй антенной 13 ведут прием динамического шума моря от поверхности моря. В блоках 7 и 14 осуществляется усиление шумовых сигналов, их фильтрация (обычно имеется полосовой фильтр от 3 до 6 кГц со спадами во внерабочей полосе порядка 46 дБ на октаву), а также формирование характеристики направленности с малым боковым полем (обычно с добавочными максимумами, не превышающими 2% по давлению). В АЦП 15 ведутся дискретизация и квантование. Далее ведется в блоке 16 взаимоспектральный анализ с выделением действительной и мнимой частей взаимного спектра, наиболее часто по методу периодограмм. В этом случае ведется запись в ОЗУ подпоследовательностей Xr(m) и Yr(m) длиной L отсчетов из непрерывных последовательностей Xr(m) и Yr(m). Для каждой из взвешенных последовательностей Xr(m) и Yr(m) рассчитываются коэффициенты БПФ
Xr(K) = xr(m)W(m)
xr(m)W(m)
Yr(K) = yr(m)W(m)e
yr(m)W(m)e где W(m) - соответствующее окно (обычно окно Хэннинга). Периодограмма Ir(fк) вычисляется по формуле
где W(m) - соответствующее окно (обычно окно Хэннинга). Периодограмма Ir(fк) вычисляется по формуле
Ir(fк) =  Xr(K)·Y
Xr(K)·Y

 Оценка взаимного энергетического спектра находится в виде
Оценка взаимного энергетического спектра находится в виде (fк) =
(fк) =  Xr(K)Y
Xr(K)Y
fк=  - частоты дискретного преобразования Фурье. Далее выделяется мнимая и действительные составляющие взаимного спектра, данные о которых поступают на вычислитель 4 глубины. Вычислитель глубины определяет глубину моря Н, данные о которой высвечиваются на индикаторе 5 и регистрируются на ленту рекордера, входящего в блок индикатора 5.
- частоты дискретного преобразования Фурье. Далее выделяется мнимая и действительные составляющие взаимного спектра, данные о которых поступают на вычислитель 4 глубины. Вычислитель глубины определяет глубину моря Н, данные о которой высвечиваются на индикаторе 5 и регистрируются на ленту рекордера, входящего в блок индикатора 5.
Технические преимущества предлагаемого способа и реализующего его устройства сводятся к отсутствию демаскирующего излучения, что имеет исключительное значение для аппарата и повышает точность определения глубины моря, чем у прецизионных эхолотов.
Предлагаемый способ (в отличие от других возможных вариантов этого способа) наиболее целесообразно применять в случае повышенного уровня акустических помех корабельного происхождения на аппарате, поскольку при взаимоспектральном анализе эти помехи в значительной мере подавляются. Действительно, взаимный энергетический спектр помех корабельного происхождения может быть записан, используя предположение изотропности поля, в виде
G12,к.п(f)  P
P где К - волновое число;
где К - волновое число;
L - расстояние между антеннами.
Учитывая, что антенна, главный максимум которой ориентирован в поверхность моря, располагается на палубе аппарата, а антенна, главный максимум которой ориентирован в направлении дна моря, располагается в выгородке в днищевой части, расстояние L составляет порядка полутора десятков метров. В этом случае коэффициент sinKL/KL очень мал.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОБЪЕМНОГО РАССЕЯНИЯ ЗВУКА В ОКЕАНИЧЕСКОЙ СРЕДЕ | 1992 |
|
RU2012070C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА РАССЕЯНИЯ АКУСТИЧЕСКИХ ВОЛН ДНОМ ОКЕАНА | 1992 |
|
RU2047222C1 |
| СПОСОБ НАПРАВЛЕННОГО ПРИЕМА ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1990 |
|
SU1840513A1 |
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПЕЛЕНГОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
SU1840092A1 |
| СПОСОБ НАПРАВЛЕННОГО ПРИЕМА ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1990 |
|
SU1840431A1 |
| СПОСОБ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1986 |
|
SU1840507A1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 1994 |
|
RU2079168C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2249802C2 |
Использование: в технической гидроакустике. Сущность изобретения: способ определения глубины моря на погруженном аппарате включает прием акустического сигнала в направлении от дна моря, преобразование акустических колебаний в электрические и расчет глубины моря с учетом данных с глубины погружения и скорости C пробега звуковых волн. В качестве акустического сигнала используют динамический шум моря, превышающий по уровню шумы корабельного происхождения. Одновременно с приемом акустического сигнала от дна моря принимают шумы моря от его поверхности, производят пространственную фильтрацию принятых от дна и поверхности моря шумов, выделяя шумы моря от участков поверхности и дна непосредственно над и под погруженным аппаратом, осуществляют взаимоспектральную обработку преобразованных в электрические, принятых в направлении от дна и поверхности шумов моря, выделяя действительную и мнимую части взаимного энергетического спектра, и определяют глубину моря по формуле, приведенной в описании. Угол в котором производят прием шума от поверхности моря, выбирают из соотношения, приведенного в описании. Число усреднений при вычислении действительной и мнимой составляющих взаимного энергетического спектра определяют из неравенства, приведенного в описании. Описано также устройство, позволяющее осуществлять данный способ. 2 с. и 4 з.п. ф-лы., 7 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ МОРЯ НА ПОГРУЖЕННОМ АППАРАТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ.



| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Простаков А.Л | |||
| Электронный ключ к океану | |||
| Л.: Судостроение, 1978. | |||
