Последующее описание касается области медицины, области информационного обеспечения и предшествующего уровня техники. Область его применения - мониторинг дыхания пациентов, лабораторные исследования и т.п.
Дыхание - важный физиологический процесс, и мониторинг дыхания имеет множество применений, таких как раннее обнаружение ухудшения состояния пациента; обеспечение сигнала по синхронизации с дыхательными движениями для медицинской визуализации или иных медицинских процедур, тестов и т.п., чувствительных к дыхательной деятельности; определение, находится ли объект в состоянии сна или бодрствования; немедленное обнаружение остановки дыхания и т.д.
В некоторых мониторах дыхания и способах мониторинга дыхания используется акселерометр для детектирования движения грудной клетки. Акселерометр детектирует движения грудной клетки опосредованно, путем измерения отклонения ориентации датчика в отношении гравитационного поля Земли, вызванного движением грудной клетки. В результате, при некоторых положениях объекта акселерометр может лишь слабо детектировать движения грудной клетки или не может вовсе. Такие датчики, кроме того, подвержены артефактам вследствие перемещений объекта, не связанных с дыхательной деятельностью.
В других мониторах дыхания и способах мониторинга дыхания используется пьезоэлектрический датчик для детектирования дыхательного шума. Проблема, связанная с такими датчиками, заключается в их низкой чувствительности к поверхностному дыханию, при котором генерация шумов низка.
Далее предложены новые и усовершенствованные мониторы дыхания и способы мониторинга дыхания, которые позволяют преодолеть вышеприведенные и другие проблемы.
Согласно одному аспекту раскрытия представлен монитор дыхания, содержащий первый датчик, выполненный с возможностью генерирования сигнала мониторинга относящегося к дыханию движения, указывающего относящееся к дыханию движение; второй датчик, выполненный с возможностью генерирования сигнала мониторинга шумов, указывающего относящийся к дыханию шум; а также синтезатор сигналов, выполненный с возможностью синтеза сигнала монитора дыхания на основе сигнала мониторинга относящегося к дыханию движения и сигнала мониторинга относящегося к дыханию шума.
Согласно другому аспекту раскрытия представлен способ мониторинга дыхания, содержащий сбор сигналов мониторинга относящегося к дыханию движения, указывающих относящееся к дыханию движение дышащего объекта; сбор сигналов мониторинга шумов, указывающих относящийся к дыханию шум, генерируемые дышащим объектом; а также синтез сигнала монитора дыхания на основе сигнала мониторинга относящегося к дыханию движения и сигнала мониторинга относящегося к дыханию шума.
Согласно другому аспекту раскрытия представлен датчик для использования при мониторинге дыхания, содержащий акселерометр и магнетометр, совместно определяющие единый датчик, выполненный с возможностью крепления к дышащему объекту, так чтобы перемещаться в качестве блока, реагирующего относящееся к дыханию движение дышащего объекта.
Одно из преимуществ заключается в создании способов мониторинга дыхания и мониторов дыхания, обладающих повышенной устойчивостью к перемещениям или изменению положения объекта, подвергаемого мониторингу.
Другое преимущество заключается в создании способов мониторинга дыхания и мониторов дыхания, обладающих более совершенным мониторингом различных режимов дыхания.
Дополнительные преимущества настоящего изобретения станут ясны средним специалистам в данной области техники после прочтения и уяснения последующего подробного описания.
На фиг.1 схематично показан объект, подвергаемый мониторингу с помощью монитора дыхания.
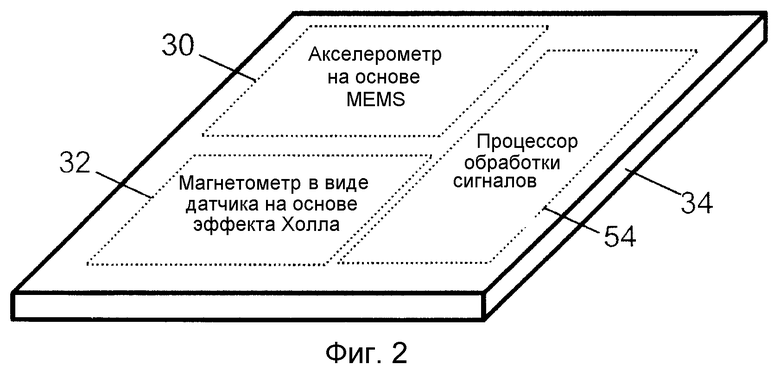
На фиг.2 схематично показан вариант осуществления интегрированных в единое целое акселерометра и магнетометра, выполненных с возможностью использования в мониторе дыхания.
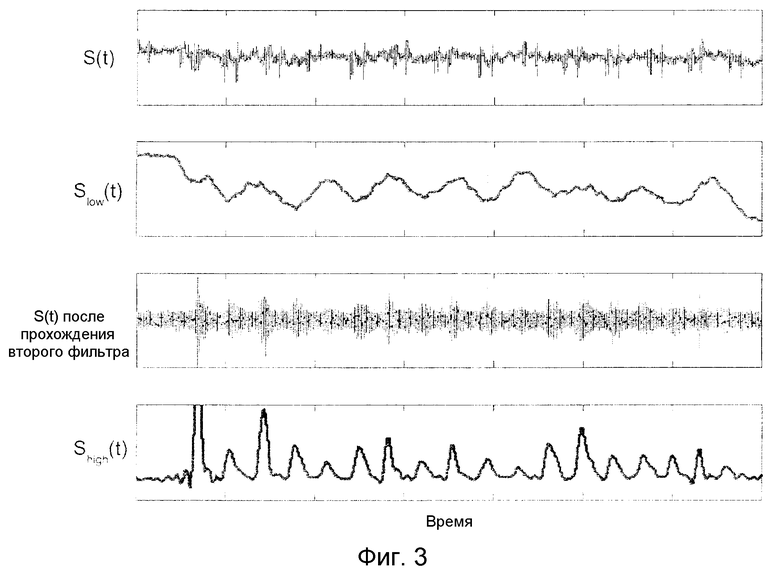
На фиг.3 схематично показаны графики как функции времени для выбранных сигналов, сгенерированных посредством мониторинга дыхания, выполненного монитором дыхания, представленным на фиг.1.
Как видно на фиг.1, объект 10 лежит на опоре 12. Представленный объект 10 - обследуемый человек; однако это могут быть также обследуемые животные. Опора 12 представляет собой стол или иную, в общем, плоскую поверхность, на которой лежит объект 10; однако могут использоваться иные опоры, например стул, а, кроме того, объект может стоять, плыть в воде или как-то иначе не пребывать на опоре.
Объект 10 подвергается мониторингу с помощью датчика 20, который выдает сигнал датчика, указывающий, по меньшей мере, относящееся к дыханию движение, такие как движения грудной клетки, сопровождающие вдох и выдох. При необходимости сигнал датчика, выдаваемый датчиком 20, может также указывать относящийся к дыханию шум, такой как шум, генерируемый относящимся к дыханию турбулентным воздушным потоком в верхних дыхательных путях. В других вариантах осуществления относящийся к дыханию шум не подвергается мониторингу или контролируется дополнительным отдельным датчиком 22.
В качестве иллюстративного примера, в некоторых вариантах осуществления датчик 20 включает в себя, по меньшей мере, один датчик, выбранный из группы, состоящей из акселерометра, гироскопа, датчика наклона или магнетометра, а дополнительный отдельный датчик 22 включает в себя, по меньшей мере, один датчик, выбранный из группы, состоящей из акселерометра, микрофона, гидрофона, пьезоэлектрического преобразователя, а также датчика вибраций. Некоторые датчики, такие как акселерометры, обеспечивают чувствительность как к относящемуся к дыханию движению, так и относящемуся к дыханию шуму. В случае датчика, рассчитанного на детектирование относящегося к дыханию шума, предпочтительно располагать датчик на горле или рядом с горлом объекта 10, как в случае показанного датчика 22, однако также может быть пригоден датчик, установленный на грудной клетке. В случае датчика, рассчитанного на детектирование относящегося к дыханию движения, предпочтительно расположение на грудной клетке, горле или в иной области, которая совершает перемещение в соответствии с дыхательным циклом.
Как опять же следует из фиг.1 и с учетом фиг.2, один предпочтительный вариант осуществления датчика 20 представляет собой акселерометр 30 и магнетометр 32, совместно определяющие единый датчик 20, выполненный с возможностью крепления к дышащему объекту 10, так чтобы перемещаться в качестве блока, реагирующего относящееся к дыханию движение дышащего объекта 10. Крепление может быть выполнено посредством связующего или клея, посредством полоски клейкой ленты, удерживающей датчик 20 на объекте 10, посредством ленты, обмотанной вокруг грудной клетки объекта 10, и т.д. Как схематично показано на фиг.2, такой датчик может быть выполнен путем интегрирования в единое целое акселерометра 30 и магнетометра 32 на общей подложке. В одном пригодном варианте осуществления акселерометр 30 и магнетометр 32 изготовлены на общей силиконовой подложке 34, при этом акселерометр 30 реализован микроэлектромеханической системой (MEMS), а магнетометр 32 реализован датчиком на основе эффекта Холла. В силу того, что оба изготовлены на общей подложке 34, акселерометр 30 и магнетометр 32 перемещаются совместно в качестве блока, реагирующего относящееся к дыханию движение, а также совершают колебания совместно в качестве блока, реагирующего относящийся к дыханию шум.
Преимущество использования сочетания акселерометра 30 и магнетометра 32 в качестве датчика 20 связано с зависимостью работы каждого из датчиков от направления. Акселерометр 30 детектирует гравитационное ускорение G, а относящееся к дыханию движение детектируется потому, что оно обычно вызывает изменения в ориентации акселерометра 30 в отношении вектора G гравитационного ускорения. Акселерометр 30 измеряет ускорение силы тяжести G как постоянное ускорение G, которое, однако, зависит от угла (φ) расположения акселерометра 30 относительно вектора G ускорения силы тяжести согласно зависимости A=Gcos(φ), где A - ускорение, измеренное акселерометром 30, а G - величина вектора G ускорения силы тяжести. Относящееся к дыханию движение, такое как движение грудной клетки, обусловленное дыханием, приводит к медленному и обычно периодическому изменению ориентации акселерометра 30, определяемой углом φ. А это приводит к медленному изменению измеренного ускорения A.
Однако, в зависимости от положения объекта 10 и места присоединения датчика 20 к объекту 10, существует возможность, что относящееся к дыханию движение может произойти в направлении, которое не вызовет изменения в ориентации акселерометра 30, определяемой углом φ, или может произойти в направлении, которое вызовет лишь малое изменение ориентации акселерометра 30, определяемой углом φ. В таких случаях акселерометр 30 не будет проявлять чувствительности или будет малочувствителен к относящемуся к дыханию движению.
Дополнительное введение магнетометра 32 обеспечивает возможность компенсации зависимости акселерометра 30 от направления. Магнетометр 32 проявляет чувствительность к ориентации магнетометра 32 (или, в более общем случае, ориентации единого датчика 20) относительно вектора В магнитного поля земли. Направление вектора В магнитного поля земли изменяется в зависимости от местоположения на земной поверхности, но он всегда, в общем, трансверсален вектору G ускорения силы тяжести (возможно за исключением окрестностей северного и южного магнитных полюсов). Соответствующая обработка выходного сигнала акселерометра 30 и выходного сигнала магнетометра 32 обеспечивает возможность сгенерировать сигнал датчика, указывающий на относящееся к дыханию движение, который является рабочим вне зависимости от ориентации единого датчика 20.
Если снова обратиться к фиг.1 и 2, монитор дыхания дополнительно включает в себя один или несколько осуществляющих обработку компонентов, выполненных с возможностью приема сигналов от одного или нескольких датчиков 20, 22 и расчета на их основе сигнала монитора дыхания. В варианте осуществления на фиг.1 такие один или несколько осуществляющих обработку компонентов могут реализовываться в виде вычислительного устройства 38, функционально связанного с одним или несколькими датчиками 20, 22 соответствующими проводами или кабелями 40, 42. По альтернативному варианту может также иметь место беспроводное соединение, такое как радиочастотный канал связи или инфракрасный канал связи. Вычислительное устройство 38 включает в себя процессор, накопитель, такой как память с произвольной выборкой (RAM), запоминающее устройство на магнитном носителе, оптическое запоминающее устройство и т.п., а также программное обеспечение, исполняемое процессором (компоненты памяти, накопителя и процессора отдельно не показаны), выполненным с возможностью реализации процесса 44 мониторинга дыхания, который преобразует сигнал или сигналы, полученные от одного или нескольких датчиков 20, 22, в сигнал 46 монитора дыхания, который может быть выведен посредством интерфейса 48 пользователя монитора дыхания (такого как дисплей 50 вычислительного устройства 38), сохранен в накопителе 52 данных (таком как магнитная или оптическая запоминающая среда вычислительного устройства 38) или использован иным образом. На фиг.1 в полном виде показан способ 44 обработки данных, реализуемый вычислительным устройством 38. Дополнительно или по альтернативному варианту вся обработка данных или ее часть может быть реализована процессором 54 обработки сигналов, выполненным в виде схем, образованных на подложке 34 совместно с акселерометром 30 и магнетометром 32, как показано на фиг.2, или выполненным иначе, например, в виде специализированного считывающего блока монитора дыхания (не показан) или в виде специализированного многоцелевого монитора контроля за пациентом (не показан).
Как видно из фиг.1, в приведенном в качестве примера процессе 44 мониторинга дыхания в качестве входных сигналов принимаются сигнал 60 акселерометра и сигнал 62 магнетометра от магнетометра 32. Процессор 64 предварительной обработки или иной процессор обработки сигналов генерирует сигнал S(t) 66 датчика на основе сигнала 60 акселерометра, выдаваемого акселерометром 30, и сигнала 62 магнетометра, выдаваемого магнетометром 32. Некоторые пригодные подходы для генерирования сигнала S(t) 66 датчика описываются ниже.
Ориентация или угловое пространственное положение единого датчика 20 определяется тремя степенями свободы (DOF) относительно системы координат, определяемой направлениями вектора G ускорения силы тяжести и вектора В магнитного поля земли. DOF-ориентация датчика 20 может быть представлена в отношении наземной системы координат. Для этого датчик 20 может рассматриваться в качестве жестко привязанной к телу системы координат, имеющей три ортогональные оси. Говорят, что датчик 20 принимает исходное положение, если оси x, y и z системы координат, связанной с телом, расположены по соответствующим осям системы координат, определяемой векторами G, B.
Один пригодный подход к обработке данных основан на признании того, что всякое угловое положение при трех степенях свободы может рассматриваться как результат последовательных поворотов вокруг перпендикулярных осей. Соответствующие три угла известны как углы Эйлера и определяются в отношении осей, которые могут быть связаны либо с телом, либо с землей, и задаются в различных последовательностях (вращение является некоммутативной операцией; другими словами, порядок, в котором выполняются последовательные повороты, влияет на конечную ориентацию). Одно известное условное обозначение углов Эйлера, которое обычно используется в авиации, связано с "креном-тангажом-рысканием". Соответствующие оси - оси, связанные с телом, при этом ось крена представляет собой продольную ось самолета, ось тангажа проходит от одного конца крыла до другого конца крыла, а ось рыскания представляет собой вертикальную ось.
Другой пригодный подход к обработке данных основан на использовании "матрицы угловых положений", которую также называют матрицей поворота или матрицей направляющих косинусов. Это матрица 3×3, в которой каждый соответствующий столбец задает направление соответствующего базового вектора связанной с телом системы координат в переводе на опорную систему координат. Матричное представление удобно для расчетов. Матрица, соответствующая второму угловому положению, которое достигается путем поворота тела из первого углового положения, может быть представлена путем умножения матрицы, соответствующей первому угловому положению, на матрицу поворота.
Следующий пригодный подход к обработке данных представляет собой подход, основанный на повороте вокруг одной оси на некоторый угол. Здесь любое угловое положение рассматривается как результат одного поворота (из исходного углового положения) вокруг определенной оси, выполненного на определенный угол. Направление оси вращения требует две из трех степеней свободы, а угол поворота определяется третьей степенью свободы.
Следующий пригодный подход к обработке данных представляет собой подход на основе алгебры кватернионов, обладающий лишь одной степенью избыточностью. В результате, в подходе с использованием кватернионов легко произвести "изменение масштаба" для представления чистого вращения.
Изменение ориентации датчика 20 в результате относящегося к дыханию движения может рассматриваться как малый возвратно-поступательный поворот вокруг выбранной оси. Угол поворота обычно составляет несколько градусов или менее. Направление оси вращения обычно заранее неизвестно. Обработка сигналов 60, 62 определяет угловое положение единого датчика 20 как функцию времени, при этом изменение ориентации вследствие дыхания может рассчитываться на основе мгновенного углового положения и усредненного по времени углового положения согласно соотношению  , откуда следует
, откуда следует  , где rC матрица мгновенных угловых положений (верхний индекс r обозначает, что она выражена в переводе на опорную систему координат),
, где rC матрица мгновенных угловых положений (верхний индекс r обозначает, что она выражена в переводе на опорную систему координат),  - матрица осредненных по времени угловых положений, а rΔC - изменение ориентации вследствие относящегося к дыханию движения. Верхний индекс T обозначает оператор транспонирования, который в случае унитарных матриц (класс, включающий в себя матрицы поворота) идентичен обратному оператору. Матрица усредненных по времени угловых положений не равносильна усреднению по времени матрицы угловых положений. Усреднение по времени коэффициентов матрицы угловых положений приводит к получению матрицы, которая более не является матрицей поворота в чистом виде. Матрица поворота является унитарной матрицей, а это означает, что ее столбцы имеют единичную длину и взаимно ортогональны (что ведет к шести степеням избыточности).
- матрица осредненных по времени угловых положений, а rΔC - изменение ориентации вследствие относящегося к дыханию движения. Верхний индекс T обозначает оператор транспонирования, который в случае унитарных матриц (класс, включающий в себя матрицы поворота) идентичен обратному оператору. Матрица усредненных по времени угловых положений не равносильна усреднению по времени матрицы угловых положений. Усреднение по времени коэффициентов матрицы угловых положений приводит к получению матрицы, которая более не является матрицей поворота в чистом виде. Матрица поворота является унитарной матрицей, а это означает, что ее столбцы имеют единичную длину и взаимно ортогональны (что ведет к шести степеням избыточности).
Для построения матрицы усредненных по времени угловых положений усредненную по времени матрицу угловых положений ортогонализируют. В одном варианте осуществления используется стандартная численная процедура, такая как ортонормализация Грэма-Шмидта. Другой подход для получения матрицы усредненных по времени угловых положений состоит в проведении итеративной оптимизации матрицы поворота (путем применения к ней последовательных корректирующих вращений), так, чтобы она соответствовала усредненной по времени матрице угловых положений с минимальным или сниженным значением ошибки по соответствующему критерию ошибок, такому как на основе среднеквадратичной разности векторов, взятой по трем столбцам. В другом подходе по построению матрицы усредненных по времени угловых положений векторы В, G магнитного и гравитационного полей усредняются по времени, и усредненное по времени угловое положение определяют по усредненным по времени векторам полей. Этот подход схож с тем, как мгновенное угловое положение определяется по мгновенным значениям векторов полей, см., например, публикацию WO/2006117731 А1.
Еще один иллюстративный подход может быть применен совместно с кватернионным представлением. Поскольку кватернион имеет только одну степень избыточности, переход от усредненных по времени коэффициентов кватерниона к кватерниону усредненных по времени угловых положений является понятным. Степень избыточности выражается условием, по которому среднеквадратичная сумма четырех коэффициентов кватерниона (т.е. длина кватерниона) равна единице. Следовательно, кватернион усредненных по времени угловых положений  может быть найден путем деления усредненного по времени кватерниона
может быть найден путем деления усредненного по времени кватерниона  на его длину:
на его длину:

Кватернион Δq, соответствующий изменению ориентации вследствие относящегося к дыханию движения, определяется из соотношений:

где q - кватернион, представляющий мгновенное угловое положение, ⊗ - оператор кватернионного произведения, а ∗ - оператор сопряжения (который для кватерниона единичной длины может заменить обратный оператор).
Данные подходы направлены на получение изменения ориентации, вызванного относящимся к дыханию движением. Такое изменение ориентации представляет собой поворот с тремя степенями свободы. Для детектирования дыхания желательно иметь один сигнал, такой как сигнал S(t) 66 датчика, который дает мгновенное значение угла поворота, вызванного относящимся к дыханию движением. Положение оси вращения при изменении ориентации менее важно. Определение угла поворота формально предполагает преобразование изменения ориентации из матричной или кватернионной формы представления в форму представления на основе оси и угла. Однако поскольку изменение ориентации сравнительно мало (обычно составляет несколько градусов или менее), можно воспользоваться среднеквадратичной суммой последних трех компонентов кватерниона (что соответствует синусу половины угла поворота). Характерная особенность кватернионного представления заключается в том, что любой кватернион q и его дополнение -q (коэффициенты взяты с обратным знаком) представляют один и тот же поворот. Это может привести к нарушению непрерывности в кватернионном представлении в последовательные моменты замеров. Чтобы избежать этих разрывов, можно при необходимости изменить знак кватерниона, а именно принять -Δq, если первый компонент кватерниона Δq отрицателен; в противном случае принять Δq. Полученный таким образом сигнал представляет мгновенное значение угла поворота датчика 20 в отношении его усредненной ориентации. Для относящегося к дыханию движения можно ожидать более или менее периодическое изменение угла как функцию времени.
Если снова вернуться к фиг.1, для иллюстрируемого датчика 20, включающего в себя акселерометр и магнетометр в качестве составляющих, сигнал S(t) 66 датчика указывает как относящееся к дыханию движение, так и относящийся к дыханию шум. Это будет верно также для датчика, в котором задействован лишь акселерометр, или датчика, в котором используется только магнетометр. Соответственно в настоящем описании признается, что сигнал S(t) 66 датчика, указывающий как относящееся к дыханию движение, так и относящийся к дыханию шум, может быть разложен на низкочастотную составляющую сигнала, указывающую относящееся к дыханию движение, и высокочастотную составляющую сигнала, указывающую относящийся к дыханию шум.
Низкочастотный сигнал, указывающий относящееся к дыханию движение, соответствующим образом выделяется путем обработки сигнала S(t) 66 датчика с использованием первого фильтра 70 для выделения низкочастотного сигнала Slow(t) 72, указывающего относящееся к дыханию движение. Для типичного обследуемого человека частоты относящегося к дыханию движения обычно лежат в диапазоне от около 0,1 Гц до около 2 Гц. Например, для взрослого человека характерно осуществление около двенадцати дыхательных циклов в минуту, что соответствует частоте 0,2 Гц. Частоты относящегося к дыханию движения могут выходить за рамки этого диапазона для некоторых взрослых людей, детей или престарелых людей, для животных и т.д. В одном пригодном варианте осуществления первого фильтра 70 сигнал S(t) 66 датчика фильтруется с помощью треугольного окна с реализацией скользящего среднего при ширине 0,4 секунды. Могут применяться также другие фильтры нижних частот или полосовые фильтры. Например, первый фильтр 70 может также быть реализован путем быстрого преобразования Фурье (FFT) и организации соответствующего спектрального окна для отбора частот, относящихся к относящемуся к дыханию движению.
Высокочастотный сигнал, указывающий относящийся к дыханию шум, соответствующим образом выделяется путем обработки сигнала S(t) 66 датчика с использованием второго фильтра 80, за которым при необходимости следует фильтр огибающей или блок 82 выделения огибающей, для выделения высокочастотного сигнала Shigh(t) 84, указывающего относящийся к дыханию шум. В некоторых вариантах осуществления второго фильтра 80 сигнал S(t) 66 датчика подвергается полосовой фильтрации с использованием фильтра Баттерворта с конечной импульсной характеристикой (FIR), имеющего нижний предел полосы пропускания примерно от 60 Гц до 80 Гц и верхний предел полосы пропускания примерно от 1000 Гц до примерно 1100 Гц. В некоторых из таких вариантов осуществления FIR-фильтр Баттерворта обладает затуханием около 60 дБ в полосе задерживания и около 1 дБ в полосе пропускания. В других вариантах осуществления второй фильтр 80 может быть реализован путем FFT (возможно такого же быстрого преобразования Фурье, которое используется в первом фильтре 70) и организации соответствующего спектрального окна для отбора частот, относящихся к относящемуся к дыханию шуму. В одном пригодном варианте осуществления фильтра огибающей или блока 82 выделения огибающей сигналу S(t) 66 датчика после фильтрации, выполняемой с помощью второго фильтра 80, придается форма меандра и применяется треугольное перемещаемое (moving) окно шириной 0,1 с для выделения высокочастотного сигнала Shign(t) 84. Могут также использоваться другие фильтры огибающей или блоки выделения огибающей, такие как фильтр огибающей на основе пикового детектора.
Согласно фиг.1, а также согласно фиг.3, синтезатор 90 сигналов синтезирует сигнал 46 монитора дыхания на основе низкочастотного сигнала Slow(t) 72, указывающего относящееся к дыханию движение, и высокочастотного сигнала Shigh(t) 84, указывающего относящийся к дыханию шум. При поверхностном дыхании относящееся к дыханию движение обычно поддаются детектированию, однако относящийся к дыханию шум может быть слишком слабым для детектирования. В этом случае синтезатор 90 сигналов в качестве сигнала 46 монитора дыхания соответствующим образом использует только низкочастотный сигнал Slow(t) 72, указывающий относящееся к дыханию движение, который возможно прошел обработку с помощью выбранной обработки сигналов. С другой стороны, на фиг.3 показаны сигналы, соответствующие затрудненному дыханию, которые включают в себя: сигнал S(t) 66 датчика (с использованием акселерометра в качестве датчика); низкочастотный сигнал Slow(t) 72, указывающий относящееся к дыханию движение; сигнал S(t) 66 датчика, прошедший обработку с помощью второго фильтра 80; а также высокочастотный сигнал Shigh(t) 84, указывающий относящийся к дыханию шум. Здесь, как в низкочастотном сигнале Slow(t) 72, указывающем относящееся к дыханию движение, так и в высокочастотном сигнале Shigh(t) 84, указывающем относящийся к дыханию шум, проявляется периодичность, свидетельствующая о дыхательной деятельности. Воздушный поток приводит к шумам на вдохе и выдохе, и, тем самым, огибающая сигнала шумов, т.е. высокочастотного сигнала Shigh(t) 84, обладает относящейся к дыханию периодичностью с частотой, вдвое превышающей частоту относящейся к дыханию периодичности низкочастотного сигнала Slow(t) 72, указывающего относящееся к дыханию движение, как показано вертикальными линиями на фиг.3. В примере на фиг.3 два сигнала 72, 82, по существу, совпадают по фазе; однако, в зависимости от проработанной обработки сигнала, между этими сигналами может существовать сдвиг по фазе.
Синтезатор 90 сигналов может синтезировать сигнал 46 монитора дыхания различными способами. В некоторых вариантах осуществления сигнал 46 монитора дыхания выдает значения частоты дыхания, указывающей на период дыхательных движений. При таком подходе как низкочастотный сигнал Slow(t) 72, так и высокочастотный сигнал Shigh(t) 84 соответствующим образом обрабатываются с помощью FFT для определения частоты дыхания, а синтез может включать в себя осреднение двух значений, принятие значения частоты дыхания, полученного из более мощного сигнала, и т.д. Другой подход заключается в расчете кросс-корреляции сигналов Slow(t) 72 и Shigh(t) 84 и определении периода функции кросс-корреляции.
В других вариантах осуществления сигнал 46 монитора дыхания представляет собой непрерывный сигнал, построенный путем объединения низкочастотного сигнала Slow(t) 72 и высокочастотного сигнала Shigh(t) 84 с использованием кросс-корреляции или иного комбинационного подхода, либо построенный путем отбора более мощного сигнала на выбранном интервале времени, либо построенный путем отбора сигнала с наивысшей гармоникой в диапазоне дыхательных частот около 0,1-2,0 Гц на выбранном интервале времени и т.д. В еще одном подходе каждый из сигналов Slow(t) 72 и Shigh(t) 84 может выводиться на дисплей 50 вычислительного устройства 38, так чтобы врач или иной медицинский работник могли ими воспользоваться, какой бы из сигналов визуально не обеспечивал самый высокий относящейся к дыханию показатель.
Интерфейс 48 пользователя монитора дыхания может также включать в себя тревожную сигнализацию, либо вместо визуального отслеживания сигналов дыхания и частоты дыхания, либо в дополнение к нему. Например, частота дыхания может определяться из обоих сигналов 72, 82, а сигнал тревоги может выдаваться только в том случае, если оба сигнала содержат информацию об угрозе жизни (например, в случае низких относящихся к дыханию показателей или их отсутствии).
В процессе 44 мониторинга дыхания, показанном на фиг.1, используется единственный сигнал S(t) 66 датчика, полученный от единственного датчика 20. В других вариантах осуществления может использоваться группа датчиков 20, 22. Например, датчик 20 может служить для ввода данных в первый фильтр 70 для получения низкочастотного сигнала Slow(t) 72, указывающего относящееся к дыханию движение, а отдельный датчик 22 может служить для ввода данных во второй фильтр 80 для получения высокочастотного сигнала Shigh(t) 84, указывающего относящийся к дыханию шум. В таких вариантах осуществления каждый из датчиков 20, 22 соответствующим образом отбирается для эффективного выполнения своих задач. Например, датчик 20 может быть выбран в виде представленного сочетания акселерометра 30 с магнетометром 32, или же выбран в виде трехосного акселерометра (т.е. трех акселерометров, выполненных с возможностью мониторинга ускорений в трех ортогональных пространственных направлениях, для обеспечения независимости от ориентации) и т.д., в то время как датчик 22 может быть выбран в виде пьезоэлектрического элемента, выполненного с возможностью измерения относящегося к дыханию шума.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. По прочтению и уяснению предшествующего подробного описания специалисты смогут предложить модификации и изменения. Предполагается, что изобретение включает в себя все подобные модификации и изменения, если они остаются в пределах объема притязаний прилагаемой формулы изобретения или ее эквивалентных пунктов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МОНИТОРИНГА ДЛЯ МОНИТОРИНГА ФИЗИОЛОГИЧЕСКОГО СИГНАЛА | 2012 |
|
RU2637610C2 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| МОНИТОРИНГ СИГНАЛОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ОРГАНИЗМА ВО ВРЕМЯ ДВИЖЕНИЯ | 2011 |
|
RU2580893C2 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| СПОСОБ ОЦЕНКИ ПОЛОЖЕНИЯ УСТРОЙСТВА УПРАВЛЕНИЯ РАБОТОЙ МАШИН | 2016 |
|
RU2721441C2 |
Группа изобретений относится к медицине. Респираторный монитор содержит первый датчик, выполненный с возможностью генерирования сигнала мониторинга респираторно-связанных движений, указывающего на респираторно-связанные движения; второй датчик, выполненный с возможностью генерирования сигнала мониторинга шумов, указывающего на респираторно-связанные шумы; а также синтезатор сигналов, выполненный с возможностью синтеза сигнала респираторного монитора на основе сигнала мониторинга респираторно-связанных движений и сигнала мониторинга респираторно-связанных шумов. Датчик для использования при мониторинге дыхания содержит акселерометр и магнетометр, совместно определяющие единый датчик, выполненный с возможностью крепления к осуществляющему дыхание объекту так, чтобы перемещаться в качестве блока, реагирующего на респираторно-связанные движения осуществляющего дыхание объекта. Группа изобретений позволяет повысить устойчивость к перемещениям или изменению положения объекта, подвергаемого мониторингу. 3 н. и 12 з.п. ф-лы, 3 ил.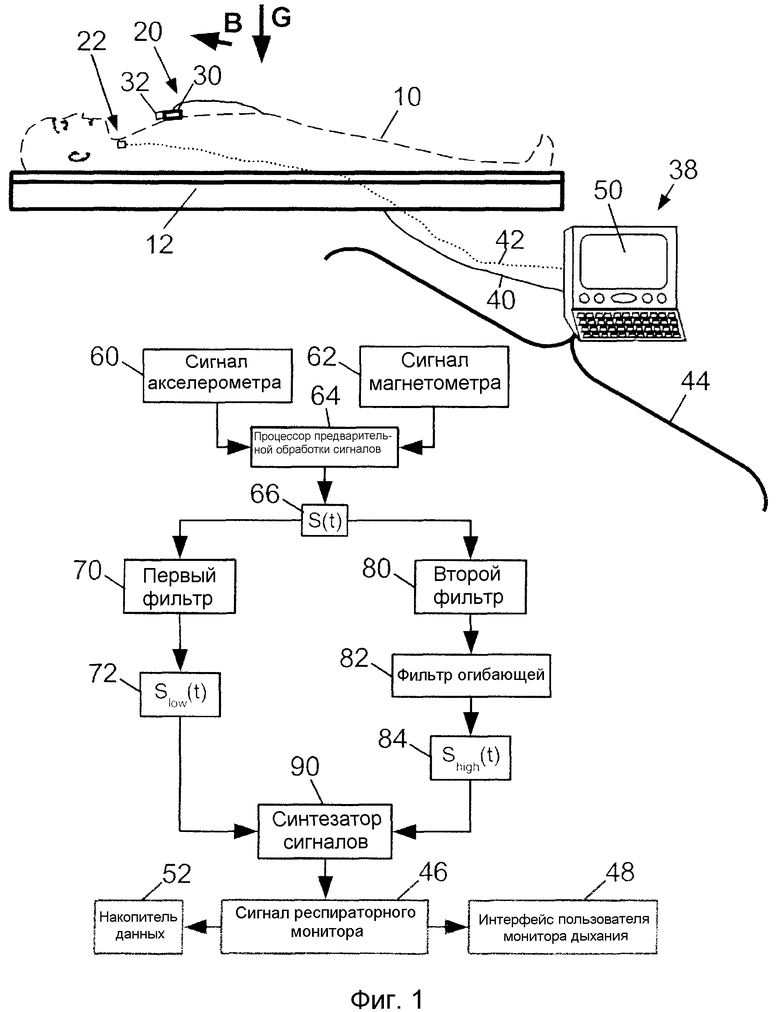
1. Монитор дыхания, содержащий:
первый датчик (20), выполненный с возможностью генерирования сигнала (66), указывающего как относящееся к дыханию движение, так и относящийся к дыханию шум;
первый фильтр (70), выполненный с возможностью формирования сигнала (72) мониторинга относящегося к дыханию движения посредством извлечения из упомянутого сигнала (66) низкочастотного сигнала, содержащего частоты относящегося к дыханию движения,
второй фильтр (80), выполненный с возможностью формирования сигнала (84) мониторинга относящегося к дыханию шума посредством извлечения из упомянутого сигнала (66) высокочастотного сигнала, содержащего частоты относящегося к дыханию шума,
синтезатор (90) сигналов, выполненный с возможностью синтеза сигнала (46) мониторинга дыхания посредством комбинирования упомянутого сигнала мониторинга относящегося к дыханию движения и упомянутого сигнала мониторинга относящегося к дыханию шума.
2. Монитор дыхания по п.1, в котором второй фильтр (80) дополнительно содержит:
фильтр или блок (82) выделения огибающей, выполненный с возможностью генерирования сигнала огибающей, соответствующего огибающей высокочастотного сигнала, при этом сигнал (84) мониторинга относящегося к дыханию шума основан на сигнале огибающей.
3. Монитор дыхания по п.1, в котором датчик (20) содержит:
по меньшей мере один акселерометр (30), выполненный с возможностью крепления к дышащему объекту (10).
4. Монитор дыхания по п.3, в котором упомянутый по меньшей мере один акселерометр (30) является единственным акселерометром, при этом датчик (20) дополнительно содержит:
магнетометр (32), соединенный с акселерометром (30) так, что акселерометр и магнетометр имеют общую ориентацию; и
процессор (54, 64) обработки сигналов, выполненный с возможностью генерирования упомянутого сигнала (66) на основе сигнала (60) акселерометра, выдаваемого акселерометром, и сигнала (62) магнетометра, выдаваемого магнетометром.
5. Монитор дыхания по п.4, в котором акселерометр (30) и магнетометр (32) интегрированы в единое целое на общей подложке (34).
6. Способ мониторинга дыхания, содержащий:
сбор сигналов (74) мониторинга относящегося к дыханию движения, указывающего относящееся к дыханию движение дышащего объекта (10);
сбор сигналов (84) мониторинга шума, указывающих относящийся к дыханию шум, генерируемый дышащим объектом; а также
синтез сигнала (46) монитора дыхания посредством вычисления кросс-корреляции сигнала мониторинга относящегося к дыханию движения и сигнала мониторинга относящегося к дыханию шума.
7. Способ мониторинга дыхания по п.6, в котором операции сбора данных содержат:
сбор сигнала (66) датчика, указывающего как на относящееся к дыханию движение, так и на относящийся к дыханию шум;
получение сигнала (72) мониторинга относящегося к дыханию движения из частотных составляющих сигнала датчика, содержащего частоты относящегося к дыханию движения; а также
получение сигнала (84) мониторинга относящегося к дыханию шума из частотных составляющих сигнала датчика, содержащего частоты относящегося к дыханию шума.
8. Способ мониторинга дыхания по п.7, в котором получение сигнала (84) мониторинга относящегося к дыханию шума содержит:
фильтрацию упомянутого сигнала (66) датчика для генерирования отфильтрованного сигнала, содержащего частоты относящегося к дыханию шума; а также
выделение огибающей упомянутого отфильтрованного сигнала.
9. Способ мониторинга дыхания по п.7, в котором сбор сигналов (66) датчика содержит:
сбор сигналов (60) акселерометра.
10. Датчик для использования при мониторинге дыхания, содержащий:
акселерометр (30);
магнетометр (32), который совместно с акселерометром определяет единый датчик (20), выполненный с возможностью крепления к дышащему объекту (10) так, чтобы перемещаться в качестве блока, реагирующего на относящееся к дыханию движение дышащего объекта, и
процессор (44, 54) обработки сигналов, выполненный с возможностью генерирования сигнала (46) монитора дыхания на основе изменения как функции времени угла поворота в трех степенях свободы (DOF) упомянутого единого датчика (20), вычисленного из сигнала (60) акселерометра, выдаваемого акселерометром (30), и сигнала (62) магнетометра, выдаваемого магнетометром (32).
11. Датчик по п.10, в котором процессор (44, 54) обработки сигналов выполнен с возможностью вычисления DOF-поворота на основе углов Эйлера.
12. Датчик по п.10, в котором процессор (44, 54) обработки сигналов выполнен с возможностью вычисления DOF-поворота на основе матрицы поворота 3×3.
13. Датчик по п.10, в котором процессор (44, 54) обработки сигналов выполнен с возможностью вычисления DOF-поворота, используя подход с поворотом вокруг одной оси на некоторый угол.
14. Датчик по п.10, в котором процессор (44, 54) обработки сигналов выполнен с возможностью вычисления DOF-поворота, используя кватернионный подход.
15. Датчик по п.10, содержащий один акселерометр (60) и один магнетометр (32).
| WO2007088539A (TECHNION RES & DEV FOUNDATION), 08.08.2007 | |||
| US2005027216A1 (GUILLEMAUD REGIS ET AL), 03.02.2005, описание [0020], фиг.1,2 | |||
| US2008082018A1 (SACKNER MARVIN A ET AL), 03.04.2008 | |||
| СПОСОБ ЛЕЧЕНИЯ ВОСПАЛИТЕЛЬНЫХ ЗАБОЛЕВАНИЙ СРЕДНЕГО УХА И СЛУХОВОЙ ТРУБЫ | 2001 |
|
RU2201188C2 |

