Область техники
Изобретение относится к области бесплатформенных инерциальных систем навигации (БИНС), в частности бесплатформенных систем ориентации (БСО), интегрированных с системой воздушных сигналов (СВС).
Уровень техники
Известна комплексная навигационная система (Патент РФ №2265190, МПК G01C 23/00) (КНС) летательного аппарата (ЛА), включающая в себя навигационные датчики и системы, работающие на различных физических принципах (в том числе от системы воздушных сигналов), а также вычислительно-логические блоки комплексной системы, обеспечивающие информационный обмен между датчиками и системами и расчет необходимых параметров состояния ЛА: блок компенсации ошибок КНС; блок формирования параметров состояния ЛА; блок формирования невязки, обеспечивающий сравнение однотипной информации, поступающей от различных измерителей. Ограничением изобретения является избыточный набор сложных и дорогостоящих элементов и, как следствие, сложность и дороговизна всей системы в целом, и при этом, в частности, принципиальная неработоспособность с гораздо более дешевой малогабаритной БИНС с «грубыми» чувствительными элементами (ЧЭ).
Известен навигационный комплекс ЛА (Патент РФ №2293950, МПК G01C 23/00) для определения координат местоположения и параметров движения ЛА, запускаемых с подвижного носителя. Навигационный комплекс ЛА содержит БИНС, измеритель составляющих ускорения носителя и составляющих угловой скорости носителя, запоминающее устройство, вычислитель оценок углов ориентации ЛА относительно носителя, вычислитель курса, крена и тангажа летательного аппарата. При этом первый вход запоминающего устройства соединен с выходом измерителя составляющих ускорения носителя и составляющих угловой скорости носителя. Первый вход вычислителя курса, крена и тангажа ЛА связан каналом передачи данных об углах ориентации носителя с измерителем углов ориентации носителя.
Ограничением этого изобретения является отказ от применения внешних средств комплексирования (в том числе системы воздушных сигналов (СВС)) с внешней информацией о скорости аппарата, и, как следствие, узость его применения на кратковременно работающих ЛА, запускаемых с подвижного носителя, а не на постоянно работающих самих подвижных носителях. И этот комплекс также неработоспособен с малогабаритными БИНС с «грубыми» ЧЭ, а может работать с БИНС с бескарданными инерциальными измерительными модулями.
Использование малогабаритных БИНС с «грубыми» ЧЭ типа MEMS (Microelectromechanical System - микроэлектронных механических систем) описано в целом ряде патентов США корпорации American GNC, например, в ряде патентов о микро (малогабаритных) инерциальных измерительных устройствах (ИИУ) (патенты США №№6671648, 6522992, 6516283) и о способах обработки измерений параметров движения с их применением (патенты США №№6697758, 6651027, 6494093, 6473713, 6427131). Основное внимание в этих патентах уделено представлению преимуществ по сравнению с «обычными», традиционными ИИУ дешевого микроблока ИИУ на «грубых» ЧЭ в БИНС с вычислительной навигационной платформой с применением в ней, в том числе контуров демпфирования и других внешних корректирующих средств.
Однако предлагаемые схемы БИНС избыточны по используемым наборам датчиковых систем и из-за этого неоптимальны по соотношению качество/цена, и, кроме того, там используют только одну вычислительную навигационную платформу.
При использовании «грубых» ЧЭ (дрейф гироскопов 0,1…1 о/с) в системе БИНС возникают большие ошибки ориентации, которые приводят к практической расходимости навигационного решения, так что для «грубых» ЧЭ необходимо использовать нетрадиционные методы построения БИНС.
Наиболее близким аналогом к предлагаемому устройству системы является устройство для БИНС на микромеханических ЧЭ низкой точности, подробно описанное в разд. 10 на стр.214-232 и представленное на блок-схеме Фиг.10.3 (с.220) этого раздела в англоязычной монографии автора-заявителя предлагаемого устройства системы Oleg Salychev, Applied Inertial Navigation: Problems and Solutions, BMSTU Press, Moscow, Russia, 2004.
Данная система осуществляет демпфирование ошибок БИНС с использованием в том числе внешней информации о скорости носителя. Но там представлена одна вычислительная навигационная платформа и нет мастер-фильтра.
Важнейшим недостатком рассматриваемого аналога является то, что демпфирование вычислительной платформы осуществляют не по разности путевых скоростей БСО и внешнего датчика, а по разности показаний БСО и системы СВС, измеряющей воздушную скорость. Это измерение содержит низкочастотную составляющую ошибки, обусловленную как физическими принципами построения СВС, так и наличием скорости ветра. Чтобы уменьшить эту составляющую, демпфирование нужно осуществлять не по разности скоростей, а по разности ускорений, что уменьшает низкочастотную составляющую ошибки СВС. Кроме того, показания СВС имеют временную задержку, что особенно сильно влияет на качество демпфирования вычислительной платформы при осуществлении быстрого маневра объекта, на котором установлена БСО.
И последним недостатком такого рода систем является существенно меньшая точность при осуществлении демпфирования ошибок от СВС по сравнению с собственным демпфированием по ускорениям для случая движения объекта с относительной постоянной скоростью и малыми путевыми скоростями.
Таким образом, главная задача изобретения - существенное повышение точности определения (при различных режимах полета в реальном времени) углов ориентации носителя дешевой БИНС с микроИИУ на «грубых» ЧЭ.
Раскрытие изобретения
Для снижения указанных недостатков, влияющих на точность измерения системой углов ориентации (тангажа, крена, курса), предлагается следующее техническое решение. Технический результат достигают тем, что в БСО реализуют преимущественно три вычислительных навигационных платформы, каждая из которых имеет свой закон управления (демпфирование инерциальных ошибок по собственному закону), зависящий от параметров движения летательного аппарата, а именно крена, производной (скорости изменения) курса, горизонтальных составляющих линейного ускорения носителя, также от качества информации внешнего источника (СВС и магнитного компаса) по отношению к БСО, а принимающий выходные сигналы платформ мастер-фильтр осуществляет их оптимальную (в среднеквадратическом смысле) финальную комбинацию.
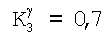
Для достижения технического результата устройство предлагаемой системы содержит блок ЧЭ из трех акселерометров и трех датчиков угловых скоростей (ДУС) по трем ортогональным осям, систему воздушных сигналов (СВС), магнитный компас, блок измерения (или определения) параметров движения носителя (сокращенно: блок параметров движения), несколько (преимущественно три) вычислительных платформ, мастер-фильтр. Выходы сигналов блока ЧЭ соединены с соответствующими входами платформ, выходы сигналов которых, а именно: углов крена и тангажа со всех трех платформ, а также угла курса со второй платформы, соединены с соответствующими входами мастер-фильтра. Выходной сигнал СВС соединен с соответствующим входом второй платформы. Сигнал курса магнитного компаса соединен с соответствующим входом мастер-фильтра. Выход блока параметров движения соединен с соответствующими входами платформ и мастер-фильтра. Выходы мастер-фильтра (сигналы углов ориентации) являются выходами всего устройства системы.
Базовые варианты реализации платформ и мастер-фильтра следующие.
Первая платформа содержит следующие блоки: блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей навигационной системы координат (сокращенно: блок вычисления скоростей), первый и второй блоки кватернионных вычислений (сокращенно: кватернионные блоки), блок вычисления матрицы направляющих косинусов и вычисления углов ориентации (сокращенно: блок матрицы и углов), блок формирования сигналов демпфирования (сокращенно: блок демпфирования). Выход сигналов линейных ускорений блока ЧЭ соединен с соответствующим входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей и соответствующим входом блока демпфирования. Другой вход блока демпфирования соединен с выходом блока параметров движения. Выход сигналов угловых скоростей блока ЧЭ соединен с соответствующим входом первого кватернионного блока, выход которого соединен с соответствующим входом второго кватернионного блока, другие входы которого также соединены с выходами сигналов угловых скоростей блока вычисления скоростей и блока демпфирования. Выход второго кватернионного блока соединен со входом блока матрицы и углов и с соответствующим входом обратной связи первого кватернионного блока. Выход сигнала матрицы блока матрицы и углов соединен с соответствующим входом блока пересчета ускорений. Выходы углов блока матрицы и углов являются выходами первой платформы.
Третья платформа, аналогично первой платформе, содержит блок пересчета ускорений, блок вычисления скоростей, первый и второй кватернионные блоки, блок матрицы и углов, блок демпфирования, а также дополнительно адаптивный фильтр Калмана. Выход сигналов линейных ускорений блока ЧЭ соединен с соответствующим входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей и соответствующим входом фильтра Калмана, выход которого соединен с соответствующими входами блока матрицы и углов и блока демпфирования. Другие входы блока фильтра Калмана и блока демпфирования соединены с выходом блока параметров движения. Выход сигналов угловых скоростей блока ЧЭ соединен с соответствующим входом первого кватернионного блока, выход которого соединен с соответствующим входом второго кватернионного блока, другие входы которого также соединены с выходами сигналов угловых скоростей блока вычисления скоростей и блока демпфирования. Выход второго кватернионного блока соединен со входом блока матрицы и углов и с соответствующим входом обратной связи первого кватернионного блока. Выход сигнала матрицы соединен с соответствующим входом блока пересчета ускорений. Выходы углов являются выходами третьей платформы.
Вторая платформа, аналогично первой платформе, содержит блок пересчета ускорений, блок вычисления скоростей, первый и второй кватернионные блоки, блок матрицы и углов, блок демпфирования. Выход сигналов линейных ускорений блока ЧЭ соединен с соответствующим входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей. Выход сигналов угловых скоростей блока ЧЭ соединен с соответствующим входом первого кватернионного блока, выход которого соединен с соответствующим входом второго кватернионного блока, другие входы которого также соединены с выходами сигналов угловых скоростей блока вычисления скоростей и блока демпфирования. Соответствующие входы блока демпфирования соединены с выходами блоков параметров движения, СВС и пересчета ускорений. Выход второго кватернионного блока соединен с соответствующим входом обратной связи первого кватернионного блока и со входом блока матрицы и углов. Выход сигнала матрицы соединен с соответствующим входом блока пересчета ускорений. Выходы углов являются выходами второй платформы.
Мастер-фильтр содержит блок определения весовых коэффициентов для углов крена и тангажа, блок определения выходных сигналов углов крена и тангажа (сокращенно: блок углов крена и тангажа), а также блок формирования выходного сигнала угла курса (сокращенно: блок угла курса). Входы блока весовых коэффициентов соединены с соответствующими выходами блока параметров движения и трех платформ по углам крена и тангажа. Выход блока весовых коэффициентов соединен со входом блока углов крена и тангажа. Входы блока угла курса соединены с соответствующими выходами сигналов углов курса второй платформы, магнитного компаса, а также с выходом блока параметров движения. Выходы блока углов крена и тангажа и блока угла курса являются выходами мастер-фильтра и всего устройства системы в целом.
Перечень чертежей
Фиг.1 приведена блок-схема верхнего уровня иерархии устройства предлагаемой системы.
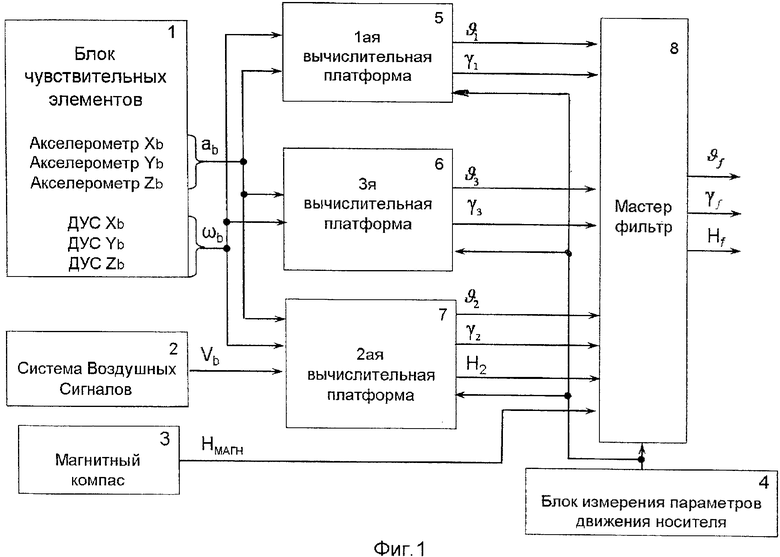
Фиг.2 - блок-схема устройства 1-й вычислительной платформы.
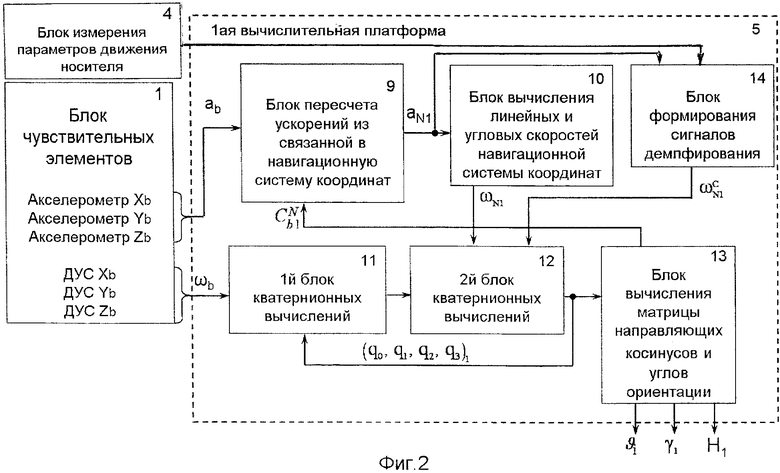
Фиг.3 - блок-схема устройства 3-й вычислительной платформы.
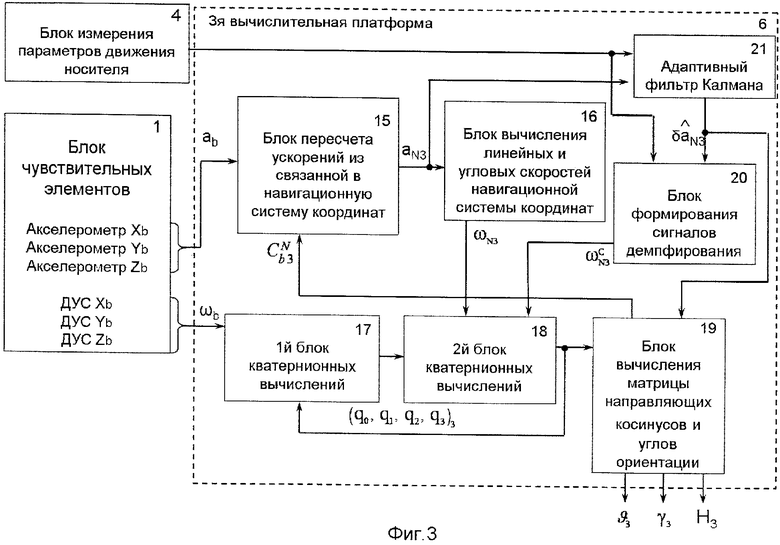
Фиг.4 - блок-схема устройства 2-й вычислительной платформы.
Фиг.5 - блок-схема устройства мастер-фильтра.
Фиг.6 и 7 - сравнение показаний параметров крена и тангажа, полученных предлагаемым устройством, прототипным устройством и эталонной системой.
Осуществление изобретения
На фиг.1…5 блоки системы имеют следующую сквозную нумерацию: 1 - блок чувствительных элементов трех акселерометров и трех датчиков угловых скоростей по трем ортогональным осям, 2 - система воздушных сигналов, 3 - магнитный компас, 4 - блок измерения параметров движения носителя системы, 5-7 - соответственно первая, третья и вторая вычислительные платформы, 8 - мастер-фильтр; в первой вычислительной платформе 5: 9 - блок пересчета ускорений из связанной в навигационную систему координат, 10 - блок вычисления линейных и угловых скоростей навигационной системы координат, 11, 12 - первый и второй блоки кватернионных вычислений, 13 - блок вычисления матрицы направляющих косинусов и вычисления углов ориентации, 14 - блок формирования сигналов демпфирования; в третьей вычислительной платформе 6: 15 - блок пересчета ускорений из связанной в навигационную систему координат, 16 - блок вычисления линейных и угловых скоростей навигационной системы координат, 17,18 - первый и второй блоки кватернионных вычислений, 19 - блок вычисления матрицы направляющих косинусов и вычисления углов ориентации, 20 - блок формирования сигналов демпфирования; 21 - адаптивный фильтр Калмана; во второй вычислительной платформе 7: 22 - блок пересчета ускорений из связанной в навигационную систему координат, 23 - блок вычисления линейных и угловых скоростей навигационной системы координат, 24, 25 - первый и второй блоки кватернионных вычислений, 26 - блок вычисления матрицы направляющих косинусов и вычисления углов ориентации, 27 - блок формирования сигналов демпфирования; в мастер-фильтре 8: 28 - блок определения весовых коэффициентов для углов крена и тангажа, 29 - блок определения выходных сигналов углов крена и тангажа, 30 - блок формирования выходного сигнала угла курса.
На чертежах приняты следующие обозначения сигналов устройства: из блока 1: ab - ускорение и ωb - угловая скорость объекта навигации в связанной системе координат. На блок-схемах вычислительных платформ (i=1, 2, 3 соответствует номеру платформы): aNi - ускорение и ωNi - угловая скорость объекта навигации в навигационной системе координат платформы;  - управляющая угловая скорость для демпфирования ошибок платформы,
- управляющая угловая скорость для демпфирования ошибок платформы,  - матрица направляющих косинусов; (q0 q1 q2 q3)i - кватернион поворота от связанной к навигационной системе координат платформы;
- матрица направляющих косинусов; (q0 q1 q2 q3)i - кватернион поворота от связанной к навигационной системе координат платформы;  - угол тангажа; γi - угол крена; Hi - угол курса. Также:
- угол тангажа; γi - угол крена; Hi - угол курса. Также:  - оценка ускорения в навигационной системе координат, полученная адаптивным фильтром Калмана третьей платформы. Vb - воздушная скорость с блока СВС; НМАГН - магнитный курс с блока магнитного компаса. На блок-схеме мастер-фильтра обозначены: весовые коэффициенты угла тангажа
- оценка ускорения в навигационной системе координат, полученная адаптивным фильтром Калмана третьей платформы. Vb - воздушная скорость с блока СВС; НМАГН - магнитный курс с блока магнитного компаса. На блок-схеме мастер-фильтра обозначены: весовые коэффициенты угла тангажа  и угла крена
и угла крена  (i=1, 2, 3),
(i=1, 2, 3),  - выходное значение угла тангажа;
- выходное значение угла тангажа;  - выходное значение угла крена;
- выходное значение угла крена;  - выходное значение угла курса.
- выходное значение угла курса.
Информационный и сигнальный обмен между входами-выходами блоков осуществляют по линиям связи, показанным на блок-схемах тонкими сплошными линиями. Линии связи представляют собой известные линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др. В качестве каналов передачи данных могут использоваться различные цифровые и аналоговые каналы, например каналы информационного обмена, выполненные в соответствии с ГОСТ 18977-79 (Комплексы бортового оборудования самолетов и вертолетов. Типы функциональных связей. Виды и уровни электрических сигналов).
Устройство системы
Для повышения точности и эффективности работы устройство системы собрано, запрограммировано, отлажено и работает следующим образом.
БСО решает задачу автономного определения угловой ориентации объекта на основе измеряемых с помощью гироскопов и акселерометров угловых скоростей и ускорений объекта.
По измерениям, поступающим от единственного блока чувствительных элементов, каждая вычислительная платформа формирует собственное навигационное решение. Навигационное решение каждой из вычислительных платформ имеет наименьшие ошибки в своем режиме движения носителя, характеризующемся определенной величиной измеряемых (или определяемых) параметров движения носителя, а именно угла крена, производной угла курса, горизонтальных составляющих линейного ускорения.
Конкретно для 1-й платформы наименьшая величина ошибок достигается в крейсерском режиме (полет с постоянной скоростью), для 2-й - при малом маневре (γ<30°,  <0,5°/c), для 3-й - при сильном маневре (γ>30°,
<0,5°/c), для 3-й - при сильном маневре (γ>30°,  >0,5°/с). При этом указанные выше параметры движения носителя участвуют в формировании величин коэффициентов К, Kb демпфирования ошибок всех вычислительных платформ.
>0,5°/с). При этом указанные выше параметры движения носителя участвуют в формировании величин коэффициентов К, Kb демпфирования ошибок всех вычислительных платформ.
Комплексирование навигационных решений платформ позволяет сформировать единое решение, оптимальное (в среднеквадратическом смысле) для всей совокупности режимов полета носителя, фиксируемых его измеряемыми параметрами движения, и таким образом повысить точность определения углов ориентации. Для повышения точности определения углов ориентации вводят систему воздушных сигналов (СВС) и магнитный компас. СВС измеряет статическое, динамическое и полное давление воздуха, с помощью которых решаются задачи определения высоты и скорости объекта относительно атмосферы.
На Фиг.2 представлена функциональная схема первой (1-й) вычислительной платформы. Это базовая платформа, которая работает в своих базовых блоках пересчета ускорений, вычисления скоростей, первом и втором кватернионных блоках, блоке вычисления матрицы направляющих косинусов и углов ориентации. По величинам угловых скоростей ωb, измеренных датчиками угловой скорости блока 1, рассчитывают элементы кватерниона конечного поворота от связанной системы координат к инерциальной (блок 11), а затем от инерциальной системы координат к навигационной (блок 12). По элементам кватерниона конечного поворота (q0 q1 q2 q3) в блоке 13 вычисляют элементы матрицы направляющих косинусов  перехода от связанной системы координат к навигационной, а также элементы кватерниона используют в блоке 11 на следующем шаге дискретных вычислений. В блоке 9 при помощи матрицы направляющих косинусов осуществляют пересчет ускорений ab, измеренных акселерометрами блока 1, в навигационную систему координат:
перехода от связанной системы координат к навигационной, а также элементы кватерниона используют в блоке 11 на следующем шаге дискретных вычислений. В блоке 9 при помощи матрицы направляющих косинусов осуществляют пересчет ускорений ab, измеренных акселерометрами блока 1, в навигационную систему координат:  .
.
Затем в блоке 10 осуществляют вычисление линейных и угловых скоростей навигационной системы координат. Рассчитанные угловые скорости поступают на вход блока 12. Углы ориентации (тангаж, крен и курс) вычисляют в блоке 13 по элементам матрицы направляющих косинусов.
Аналогично первой платформе в базовых блоках работают и две другие платформы, хотя у них есть и существенные дополнительные отличия.
Реализация блоков формирования сигналов демпфирования различна для каждой из трех вычислительных платформ, но во всех платформах сформированный в этом блоке сигнал управляющей скорости  поступает во второй блок кватернионных вычислений и участвует в расчете кватерниона поворота от инерциальной системы координат к навигационной.
поступает во второй блок кватернионных вычислений и участвует в расчете кватерниона поворота от инерциальной системы координат к навигационной.
В первой платформе демпфирование ошибок осуществляют с использованием показаний собственных ускорений навигационной системы (выход блока 9). Формирование сигналов демпфирования осуществляют в блоке 14 по следующим уравнениям:
 ;
;  ,
,
 ;
; 
Здесь обозначены:
 ,
,  - проекции управляющей угловой скорости
- проекции управляющей угловой скорости  для демпфирования ошибок платформы,
для демпфирования ошибок платформы,
 ,
,  - погрешности определения линейной скорости,
- погрешности определения линейной скорости,
 ,
,  - производные погрешностей определения линейной скорости,
- производные погрешностей определения линейной скорости,
 ,
,  - проекции ускорения aN навигационной системы координат,
- проекции ускорения aN навигационной системы координат,
Kb, K - параметры демпфирования (зависят от типа и параметров движения носителя, например:  ,
,  .
.
Указанные сигналы ( ,
, ) поступают на вход второго кватерниона поворота от инерциальной к навигационной системе координат (блок 12).
) поступают на вход второго кватерниона поворота от инерциальной к навигационной системе координат (блок 12).
Осуществляемое таким образом автономное демпфирование будет обладать достаточно высокой точностью при крейсерском полете (полет с постоянной скоростью) носителя (авиационного объекта). Однако при осуществлении маневра носителя первая платформа будет возмущаться собственными ускорениями, которые приведут к большим погрешностям в определении углов ориентации. Чтобы избавиться от возмущаемости первой вычислительной платформы при осуществлении маневра носителя, к демпфирующему звену добавлено пороговое устройство, логика которого описывается в зависимости от параметров движения носителя: К=0, если |γ| (крен)>порога или | | (производная курса)>порога или |aN|, |aE| (горизонтальные составляющие линейного ускорения)>порога (или |VN|, |VE|<10 м/с при зависании вертолета). Величины порогов зависят от типа носителя: самолет, реактивный самолет, вертолет, беспилотное средство и т.д.
| (производная курса)>порога или |aN|, |aE| (горизонтальные составляющие линейного ускорения)>порога (или |VN|, |VE|<10 м/с при зависании вертолета). Величины порогов зависят от типа носителя: самолет, реактивный самолет, вертолет, беспилотное средство и т.д.
На Фиг.3 приведена функциональная схема третьей вычислительной платформы. Здесь все связи и блоки совпадают с первой вычислительной платформой за исключением введения дополнительного блока адаптивного (к параметрам движения носителя) фильтра Калмана (блок 21), на вход которого поступает ускорение навигационной системы с блока 15, а также введения коррекции ошибок ориентации (выход блока 21 соединен с соответствующим входом блока матрицы и углов 19).
Основной особенностью третьей платформы является фильтрация ускорений адаптивным фильтром Калмана, обусловленных маневром летательного средства, и выделение ошибок ориентации вычислительной платформы. При этом в крейсерском режиме движения точность ориентации будет хуже, чем в первой платформе (за счет накопления ошибок при слабом демпфировании), тогда как в сильном маневре точность системы не будет возмущаться собственными ускорениями летательного аппарата. В качестве измерений для адаптивного фильтра Калмана используют показания акселерометров в навигационной системе координат. Отличие адаптивного фильтра Калмана от традиционного заключается в адаптивной подстройке матрицы измерительных шумов в зависимости от квадрата величины обновляемого процесса, зависящего от реальных ошибок оценивания.
Оценки фильтра Калмана поступают на соответствующий вход блока 20, в котором реализуют такие же уравнения демпфирования платформы, как и в первой платформе. При этом существуют следующие отличительные особенности третьей вычислительной платформы:
- вместо  ,
,  используют оценки фильтра Калмана
используют оценки фильтра Калмана  ,
,  ;
;
- параметры демпфирования на несколько порядков меньше, чем в первой платформе (например,  ,
,  .
.
По оценкам адаптивного фильтра Калмана рассчитывают оценки ошибки ориентации платформы в горизонте как  и
и  (g - ускорение свободного падения), после чего в блоке 19 происходит коррекция матрицы направляющих косинусов
(g - ускорение свободного падения), после чего в блоке 19 происходит коррекция матрицы направляющих косинусов  , как
, как
где  (исходная) - исходная матрица направляющих косинусов,
(исходная) - исходная матрица направляющих косинусов,
 (корректируемая) - скорректированная матрица направляющих косинусов.
(корректируемая) - скорректированная матрица направляющих косинусов.
На Фиг.4 представлена функциональная схема второй вычислительной платформы. Здесь все традиционные блоки и связи совпадают с первой вычислительной платформой, но также введены дополнительные связи от блока 2 СВС и блока 4 параметров движения.
Демпфирование ошибок производят по разности ускорений БСО и СВС, для чего в блоке 27 реализуют следующий алгоритм формирования сигналов демпфирования:
 ;
;
 ,
,


где К, Kb - коэффициенты демпфирования (величины зависят от параметров движения носителя),
 ,
,  - ускорения навигационной системы координат,
- ускорения навигационной системы координат,
ab - ускорение, полученное дифференцированием воздушной скорости
носителя Vb, измеренной СВС,
Н - угол курса,
 ,
,  - проекции управляющей угловой скорости на оси навигационной системы координат,
- проекции управляющей угловой скорости на оси навигационной системы координат,
 ,
,  - погрешности определения линейной скорости,
- погрешности определения линейной скорости,
 ,
,  - производные погрешностей определения линейной скорости,
- производные погрешностей определения линейной скорости,
ax N, ay N - проекции ускорения на оси навигационной системы координат.
При этом Kb=0, когда Vb<15 м/с (так как при малых скоростях летательного аппарата воздушная скорость имеет большие погрешности), а также в случае, когда крен γ>30° и  >0,5°/с, что соответствует маневру летательного аппарата, когда задержка в показаниях воздушной скорости может привести к возмущаемости второй вычислительной платформы.
>0,5°/с, что соответствует маневру летательного аппарата, когда задержка в показаниях воздушной скорости может привести к возмущаемости второй вычислительной платформы.
В крейсерском полете величина Kb на несколько порядков меньше, чем в первой платформе, например, Kb=0,05 (1/м).
Навигационные решения вычислительных платформ 5-7 (значения углов крена и тангажа со всех платформ, а также курса со второй платформы) поступают на вход мастер-фильтра 8, который осуществляет комбинацию индивидуальных решений в зависимости от параметров движения носителя из блока 4.
Функциональная схема реализации мастер-фильтра представлена на Фиг.5. Здесь в блоке 28 осуществляют расчет весовых коэффициентов  ,
,  , где i=1, 2, 3. Величины коэффициентов зависят от параметров движения носителя и от точности определения углов ориентации каждой из платформ. При этом
, где i=1, 2, 3. Величины коэффициентов зависят от параметров движения носителя и от точности определения углов ориентации каждой из платформ. При этом  ,
,  , что обеспечивает несмещенность финальных оценок углов.
, что обеспечивает несмещенность финальных оценок углов.
Конкретные значения параметров  ,
, 
 будут зависеть как от типа летательного аппарата, так и от погрешностей каждой из платформ в конкретном режиме движения.
будут зависеть как от типа летательного аппарата, так и от погрешностей каждой из платформ в конкретном режиме движения.
Пример выбора  ,
,  ,
,  при различных условиях полета:
при различных условиях полета:
- крейсерский полет с постоянной скоростью  ,
,  ,
,  ;
;
- ограниченное маневрирование  ,
,  ,
,  ;
;
- сильное маневрирование  ,
,  ,
,  ;
;
- зависание (для вертолета)  ,
,  ,
,  .
.
Затем в блоке 29 осуществляют определение выходных сигналов в следующем виде (например, для угла тангажа):

Выходное значение курса формируют в блоке 30 следующим образом:
Hf=H2-K·(H2-НМАГН)filt,
где Н2 - показания курса со второй вычислительной платформы 7;
НМАГН - показания курса с блока 3 магнитного компаса,
К·(Н2-НМАГН)filt - разность показаний после фильтрации с помощью фильтра низких частот из блока 30.
В качестве фильтра низких частот применяют, например, адаптивный фильтр Калмана, коэффициент К которого меняется в зависимости от параметров движения носителя: угла крена и производной курса.
Выходы мастер-фильтра 8 являются выходами всего устройства и содержат информацию о финальных углах ориентации: тангажа, крена, курса.
Данное техническое устройство официально сертифицировано (модуль пространственной ориентации МПО) в составе интегрированной системы резервных приборов ИСРП-3. Это единственный в России сертифицированный блок ориентации на «грубых» микромеханических ЧЭ.
На Фиг.6 и 7 представлены реализация показаний предлагаемой системы устройства БСО (МПО) по тангажу и крену и эталонный сигнал системы (система бесплатформенной курсовертикали (СБКВ) на волоконно-оптических гироскопах (ВОГ)). Кроме того, приведено традиционное решение системы БСО прототипа с одной вычислительной платформой.
На графиках представлены реализации работ сравниваемых систем во всех основных режимах полета (А) крейсерском, В) быстром маневре (большом крене) и С) среднем маневре (малом крене)) ЛА - носителя системы. На графиках вертикальными штриховыми линиями выделены и отмечены буквами А, В, С соответствующие участки графиков для каждого режима полета.
Сравнение показаний систем позволяет сделать вывод о том, что предложенное устройство существенно превышает по точности показания прототипной системы и достаточно близко к работе эталонной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |




Изобретение относится к области приборостроения и может найти применение в бесплатформенных инерциальных системах навигации (БИНС), в частности в бесплатформенных системах ориентации (БСО), интегрированных с системой воздушных сигналов (СВС). Технический результат - повышение точности. Для достижения данного результата БСО содержит три вычислительных навигационных платформы, каждая из которых имеет свой закон управления. Каждая платформа осуществляет демпфирование инерциальных ошибок по собственному закону. Принимающий выходные сигналы платформ мастер-фильтр осуществляет их оптимальную (в среднеквадратическом смысле) обработку. 4 з.п. ф-лы, 7 ил.
1. Бесплатформенная инерциальная система ориентации на «грубых» чувствительных элементах (ЧЭ), содержащая блок ЧЭ из трех акселерометров и трех датчиков угловых скоростей по трем ортогональным осям, систему воздушных сигналов (СВС), магнитный компас, блок измерения (или определения) параметров движения носителя, несколько (преимущественно три) вычислительных платформ, мастер-фильтр; при этом выходы сигналов блока ЧЭ соединены с соответствующими входами платформ, выходы сигналов которых, а именно: углов крена и тангажа со всех трех платформ, а также угла курса со второй платформы, соединены с соответствующими входами мастер-фильтра; выходной сигнал воздушной скорости из блока СВС соединен с соответствующим входом второй платформы; выходной сигнал угла курса магнитного компаса соединен с соответствующим входом мастер-фильтра; выходные сигналы блока параметров движения, а именно крена, производной курса и горизонтальных составляющих линейного ускорения носителя, соединены с соответствующими входами платформ и мастер-фильтра; выходы мастер-фильтра углов ориентации являются выходами всего устройства системы.
2. Система по п.1, содержащая первую платформу, в составе которой блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей навигационной системы координат, первый и второй блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и вычисления углов ориентации, блок формирования сигналов демпфирования; при этом выход сигналов линейных ускорений блока ЧЭ соединен с соответствующим входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей и соответствующим входом блока демпфирования, другой вход которого соединен с выходом блока параметров движения; выход сигналов угловых скоростей блока ЧЭ соединен с соответствующим входом первого кватернионного блока, выход которого соединен с соответствующим входом второго кватернионного блока, другие входы которого соединены с выходами сигналов угловых скоростей блока вычисления скоростей и блока демпфирования; выход второго кватернионного блока соединен со входом блока матрицы и углов и с соответствующим входом обратной связи первого кватернионного блока; выход сигнала матрицы блока матрицы и углов соединен с соответствующим входом блока пересчета ускорений; выходы углов блока матрицы и углов являются выходами первой платформы.
3. Система по п.1, содержащая третью платформу, в составе которой блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей навигационной системы координат, первый и второй блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и вычисления углов ориентации, блок формирования сигналов демпфирования, а также адаптивный фильтр Калмана; при этом выход сигналов линейных ускорений блока ЧЭ соединен с соответствующим входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей и соответствующим входом фильтра Калмана, выход которого соединен с соответствующими входами блока матрицы и углов и блока демпфирования; другие входы блока фильтра Калмана и блока демпфирования соединены с выходом блока параметров движения; выход сигналов угловых скоростей блока ЧЭ соединен с соответствующим входом первого кватернионного блока, выход которого соединен с соответствующим входом второго кватернионного блока, другие входы которого также соединены с выходами сигналов угловых скоростей блока вычисления скоростей и блока демпфирования; выход второго кватернионного блока соединен со входом блока матрицы и углов и с соответствующим входом обратной связи первого кватернионного блока; выход сигнала матрицы блока матрицы и углов соединен с соответствующим входом блока пересчета ускорений; выходы углов блока матрицы и углов являются выходами третьей платформы.
4. Система по п.1, содержащая вторую платформу, в составе которой блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей навигационной системы координат, первый и второй блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и вычисления углов ориентации, блок формирования сигналов демпфирования; при этом выход сигналов линейных ускорений блока ЧЭ соединен с соответствующим входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей; выход сигналов угловых скоростей блока ЧЭ соединен с соответствующим входом первого кватернионного блока, выход которого соединен с соответствующим входом второго кватернионного блока, другие входы которого также соединены с выходами сигналов угловых скоростей блока вычисления скоростей и блока демпфирования; соответствующие входы блока демпфирования соединены с выходами блоков параметров движения, СВС и пересчета ускорений; выход второго кватернионного блока соединен с соответствующим входом обратной связи первого кватернионного блока и со входом блока матрицы и углов; выход сигнала матрицы блока матрицы и углов соединен с соответствующим входом блока пересчета ускорений; выходы углов блока матрицы и углов являются выходами второй платформы.
5. Система по п.1, содержащая мастер-фильтр, в составе которого блок определения весовых коэффициентов для углов крена и тангажа, блок определения выходных сигналов углов крена и тангажа, а также блок формирования выходного сигнала угла курса; при этом входы блока весовых коэффициентов соединены с соответствующими выходами блока параметров движения и трех платформ по углам крена и тангажа; выход блока весовых коэффициентов соединен со входом блока углов крена и тангажа; входы блока угла курса соединены с соответствующими выходами сигналов углов курса второй платформы, магнитного компаса, а также с выходом блока параметров движения; выходы блока углов крена и тангажа и блока угла курса являются выходами мастер-фильтра.
| OLEG SALYCHEV, Applied Inertial Navigation: Problems and Solutions, BMSTU Press, Moscow, Russia, 2004, p.214-232 | |||
| US 6408245 B1, 18.06.2002 | |||
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-16, 391-507 | |||
| US 3883812 А, 13.05.1975 | |||
| DE 19510910 А1, 28.09.1995 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

