Область техники, к которой относится изобретение
Настоящее изобретение относится к способу оценки положения устройства управления работой машин.
Уровень техники
В описании настоящего изобретения термин машина относится к любой машине, имеющей промышленное применение и управляемой дистанционно (или по кабелю), такой как машины для земляных работ, станки, подъемное оборудование, такое как мостовые подъемные краны или другое подобное оборудование.
Как известно, мостовые подъемные краны представляют собой машины, предназначенные для подъема и перемещения материалов и грузов, как на открытом воздухе, так и в закрытых пространствах. Такой кран обычно содержит мост, способный перемещаться горизонтально вдоль пары рельсовых путей и имеющий пролетную балку, на которой установлена тележка (каретка), так что эта тележка может перемещаться горизонтально вдоль пролетной балки. С тележкой соединен шкив, снабженный крюком для захвата и подъема объектов.
К тележке присоединены один или несколько тросов, которые посредством системы, содержащей шкивы, перемычки и крюки, позволяют поднимать или перемещать грузы.
Перемещениями мостового крана может управлять оператор, снабженный устройством дистанционного управления.
Известные устройства дистанционного управления позволяют, с использованием специализированных кнопок осуществлять все позиционное маневрирование мостового крана, такое как перемещение «Вперед», «Назад», «Вправо», «Влево», «Вверх», «Вниз» и т.п.
Эти кнопки соответствуют табличкам, нанесенным на сам мостовой кран и указывающим, вместе с соответствующими стрелками, направление перемещение мостового крана или тележки.
Для ясности: кнопка «Вперед», при нажатии на нее, соответствует продвижению мостового крана в направлении стрелки «Вперед» в карточке или на табличках, нанесенных на мостовой кран, это происходит аналогичным образом для перемещения «Назад» и для перемещения тележки «Вправо» или «Влево».
Первая трудность, с которой сталкиваются операторы, состоит в том, что устройство управления является подвижным, когда оно в руке оператора, устройство «следует» за оператором при его перемещениях и, в случае, когда оператор ориентирован (повернулся) в сторону, противоположную направлению, обозначенному табличками, нанесенными на мостовой кран, кнопка «Вперед» будет соответствовать перемещению в направлении, прямо противоположном тому, которое ожидал бы оператор, а именно – «Назад».
Для большой ясности, если оператор смотрит в направлении, указанном стрелкой «Вперед», нажатие соответствующей кнопки приведет к перемещению мостового крана в том же направлении взгляда оператора; но если оператор повернулся на 180° относительно направления, обозначенного стрелкой «Вперед», нажатие той же самой кнопки вызовет перемещение в противоположном направлении относительно направления, куда смотрит оператор.
То же самое можно сказать о кнопках «Вправо» и «Влево», которые соответствуют правой и левой стороне от оператора только в том случае, когда сам оператор обращен в том направлении, которое обозначено табличками, относительно крана.
Если оператор развернулся на 180° относительно этих направлений, кнопка «Вправо» будет соответствовать движению влево от оператора, и наоборот.
Все это вызывает и может вызвать проблемы с безопасностью при маневрировании с грузами, которые могут ударить и вызвать травмы и повреждения людей или имущества.
Второй пример проблем, которые оставляют открытой известные технологии, будет теперь проиллюстрирован применительно к проблемам, связанным со станками.
Как известно, при работе на станках, на которых можно управлять перемещениями по осям X и Y, т.е. на всех станках, которые имеют рукоятку для подведения шпиндельной бабки вручную с индикацией, такой как X + и - и Y + и -, оператор должен быть очень внимателен к тому, где находятся метки «+» и «-», поскольку они фиксированы, тогда как устройство управления или другой орган управления в руке оператора присоединен кабелем и может поворачиваться вместе с оператором.
Проблемы, аналогичные тем, которые обсуждались в случае подъемного оборудования, таким образом, повторяются.
Решение этих проблем описано в заявке на выдачу патента Италии N ° MI2014A001129, на которую сделана ссылка и которая включена сюда посредством этой ссылки, эта заявка описывает систему, делающую возможным вычисление, с использованием инерциальной платформы, содержащей акселерометр с тремя измерительными осями и гироскоп, ориентации устройства управления относительно машины или мостового крана, управляемого таким устройством, и, где это требуется, переназначение функции кнопок «Вперед», «Назад», «Вправо», «Влево» и т.п… в функции фактической ориентации устройства управления относительно станка или мостового крана.
Для усовершенствования вычисления ориентации устройства управления такая заявка на выдачу патента предлагает использование магнитного компаса, подходящего для генерации сигнального представления ориентации устройства управления относительно магнитного севера, в дополнение к инерциальной платформе, содержащей акселерометр и гироскоп.
Однако особенно в области промышленности, где используются мостовой кран и другое подъемное оборудование, имеется вероятность, что на магнитные измерения повлияет присутствие металлических масс значительных размеров или других факторов, которые могут исказить результаты таких измерений.
Документ D1: DE 10 2012 021 422 описывает устройство для управления подъемным оборудованием, таким как, в частности, подъемный кран. Устройство представляет собой средство дистанционного управления, оснащенное средствами связи с приводными элементами и элементом управления перемещением, например, джойстиком, которым манипулирует оператор, и средствами для определения угла отклонения устройства дистанционного управления относительно вертикального положения.
Модуль управления устройства дистанционного управления принимает сигналы, относящиеся к ориентации устройства дистанционного управления относительно вертикали, от немагнитного компаса, расположенного в том же самом устройстве дистанционного управления, например, от гироскопа, и вычисляет соответствующие команды для передачи органам перемещения подъемного устройства, таким образом, чтобы команды перемещения, выдаваемые согласно определенному направлению, соответствовали перемещению подвижных элементов подъемного устройства в том же направлении или в направлении, параллельном указанному направлению.
Целью настоящего изобретения является обеспечение того, чтобы кнопки устройства управления всегда были согласованы с направлением перемещения груза, или возможности работы, в случае станков, более естественным для оператора образом, компенсируя в то же время возможные магнитные возмущения, которые могут возникать, в реальном времени.
Следующей целью настоящего изобретения является увеличение степени безопасности использования подъемного устройства.
Раскрытие сущности изобретения
Такие цели достигаются с использованием способа оценки положения устройства управления машинами, где это устройство управления содержит несколько кнопок для управления перемещением машины в соответствующих направлениях, способ содержит следующие этапы:
- предварительная оценка положения устройства управления с использованием данных от акселерометра и магнитометра, установленных в устройстве управления;
- обновление предварительной оценки положения устройства управления с использованием данных от гироскопа, установленного в устройства управления.
Среди преимуществ описываемого технического решения можно указать тот факт, что оно делает функцию переназначения кнопок устойчивой по отношению к возможным магнитным возмущениям, которые могут искажать оценку ориентации.
В частности, эти два этапа – предварительной оценки положения устройства управления и обновления такой оценки, жестко коррелированы один с другим, поскольку предварительную оценку, получаемую на основе данных от акселерометра и магнитометра, затем фильтруют с использованием гироскопических измерений для компенсации возможных магнитных возмущений, которые могут повлиять на магнитометр.
Другие характеристики настоящего изобретения могут быть найдены в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Дополнительно характеристики и преимущества настоящего изобретения станут ясны из прочтения последующего описания, представленного посредством неограничивающих примеров, с использованием прилагаемых чертежей, на которых:
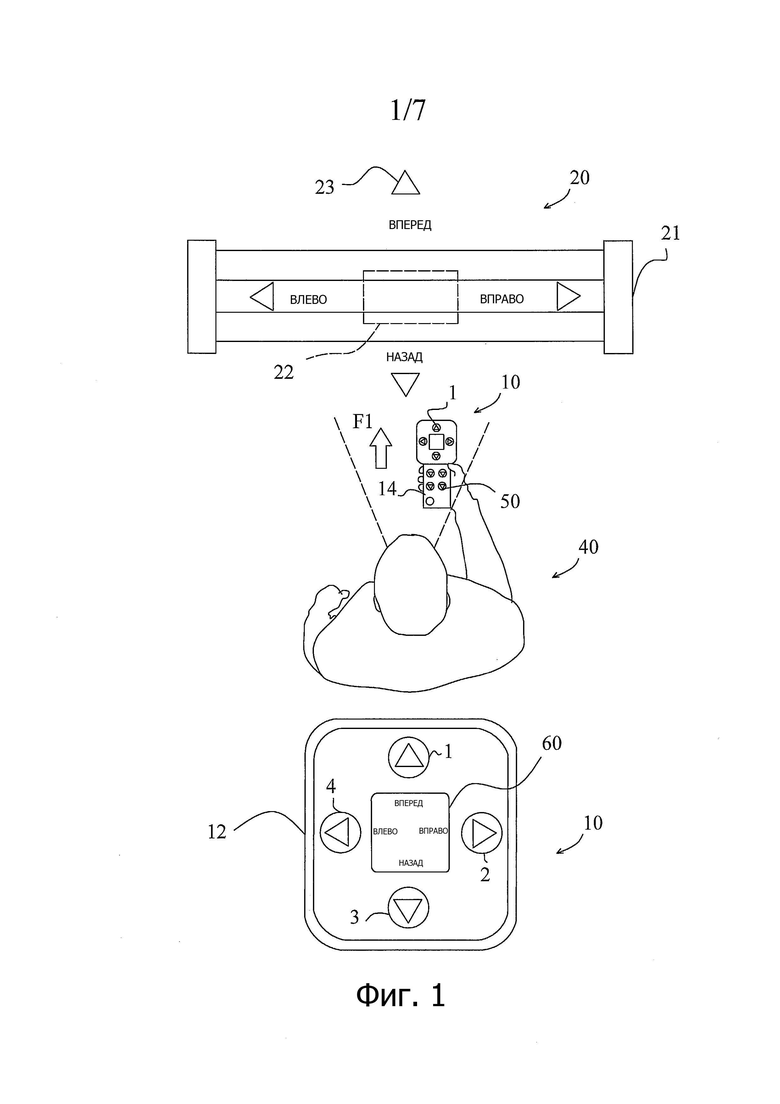
фиг. 1 показывает схематичное представление оператора, снабженного устройством управления работой мостового крана;
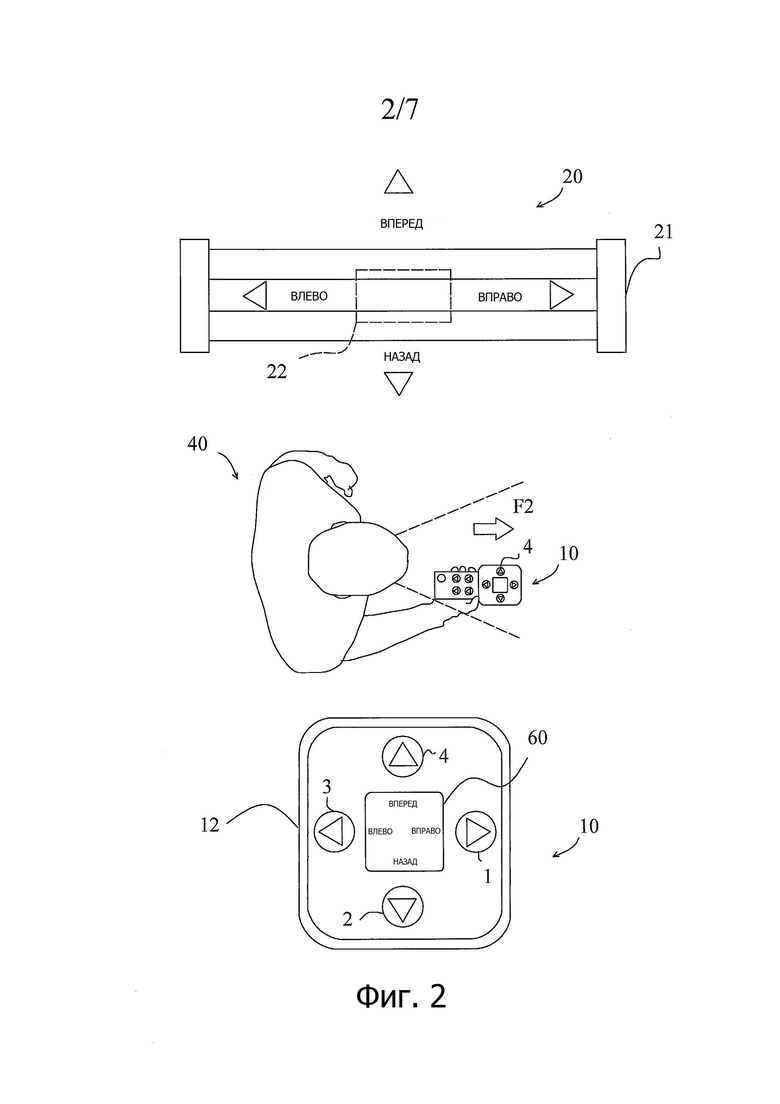
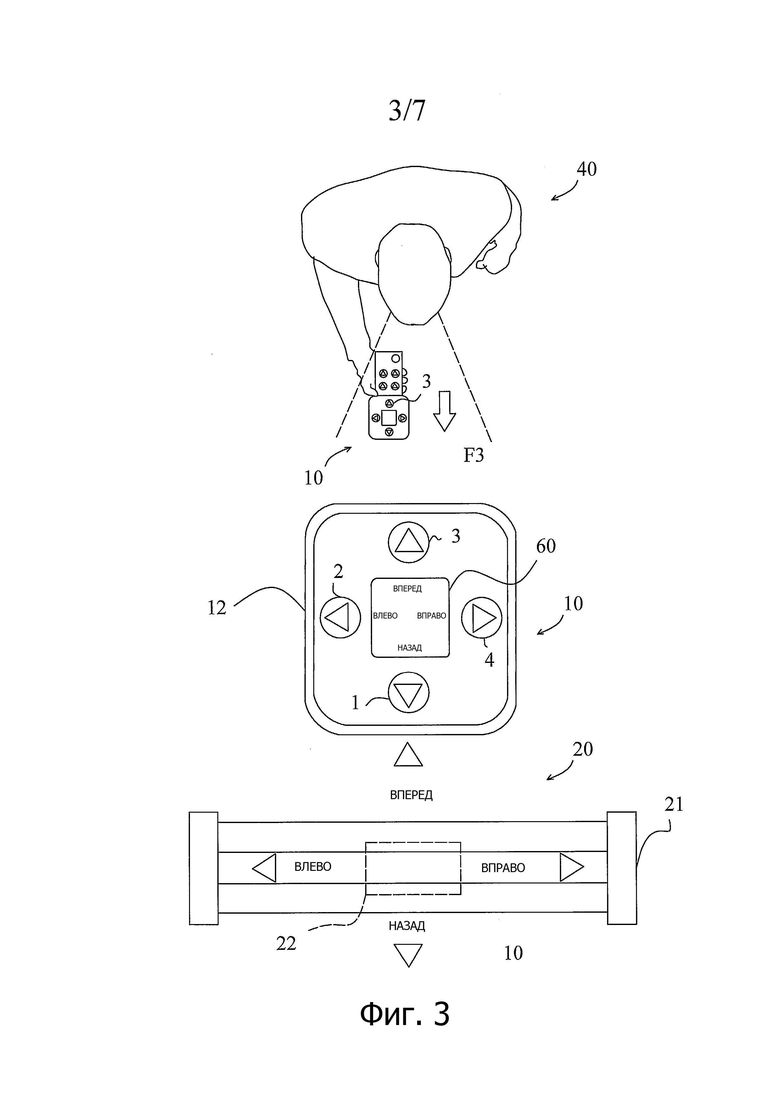
фиг. 2-4 показывают последующие представления оператора, имеющего различные ориентации относительно мостового крана, изображенного на фиг. 1;
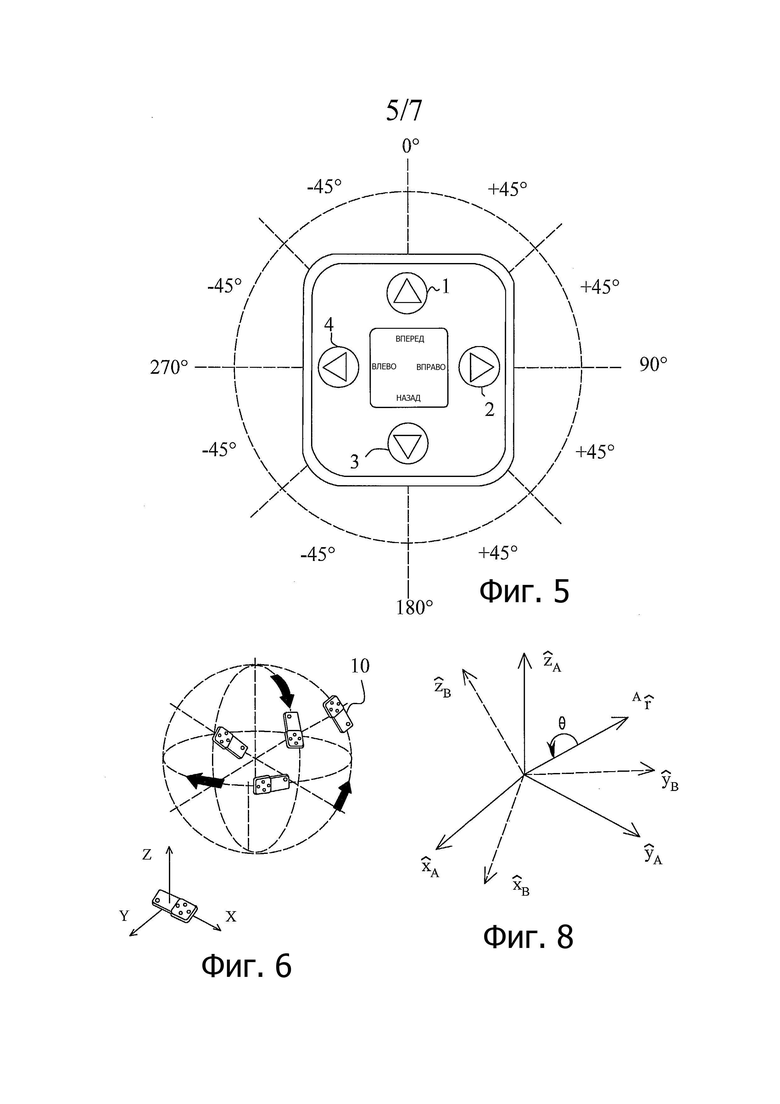
фиг. 5 представляет область работы устройства управления мостовым краном или рабочей машиной согласно одному из вариантов настоящего изобретения;
фиг. 6 концептуально представляет тот факт, что устройство управления может работать при ориентации в любом направлении в пространстве;
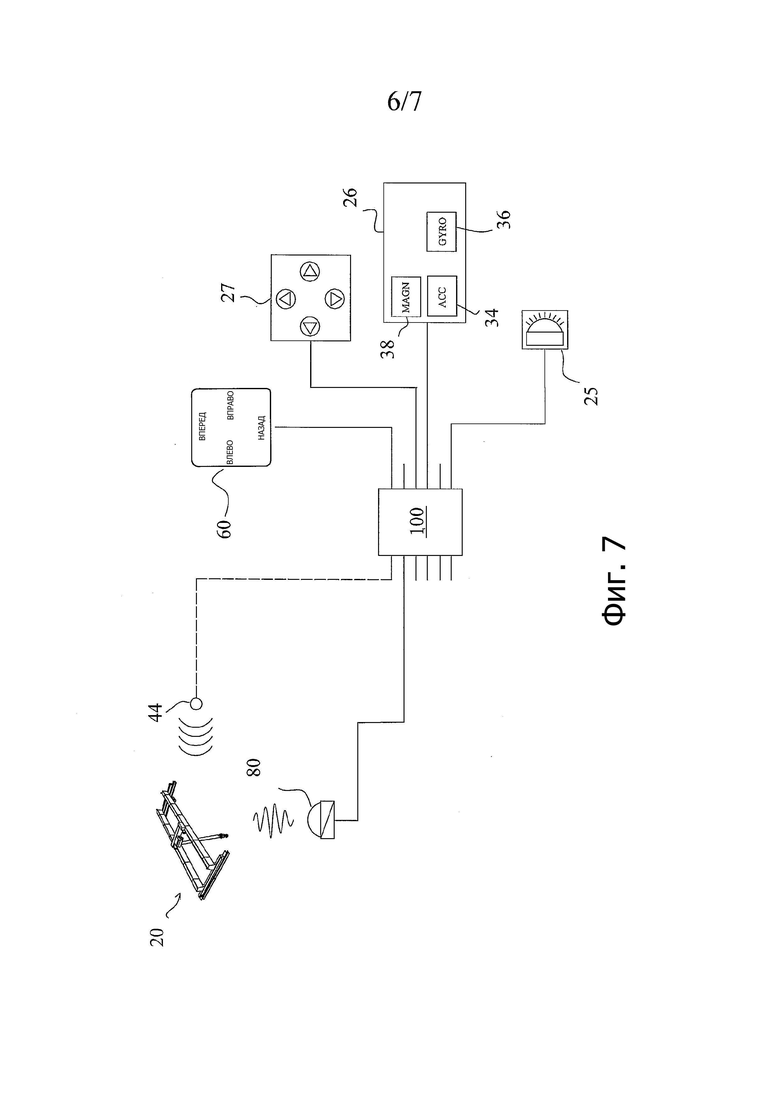
фиг. 7 показывает главные компоненты устройства управления согласно одному из вариантов настоящего изобретения;
фиг. 8 представляет поворот системы B координат относительно системы A координат на угол θ относительно единичного вектора  , определенного в системе A координат;
, определенного в системе A координат;
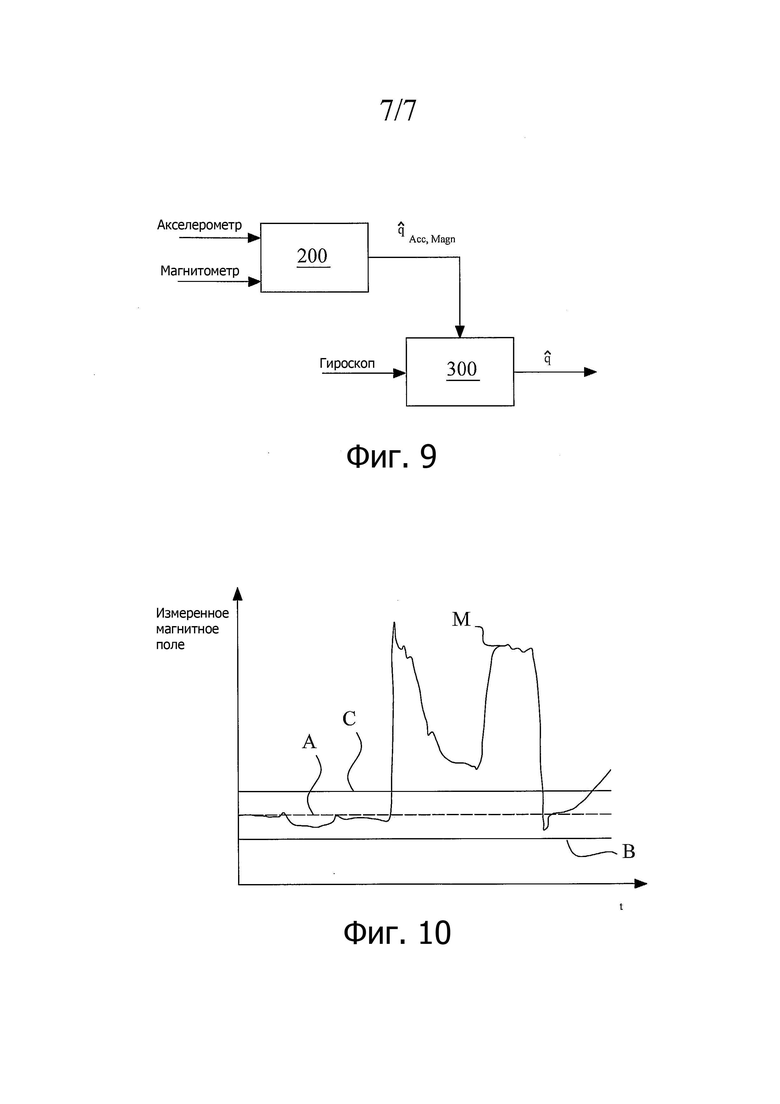
фиг. 9 представляет логическую схему этапов способа согласно настоящему изобретению; и
фиг. 10 представляет эволюцию во времени магнитного возмущения, влияющего на результат измерений магнитометра.
Подробное описание осуществления изобретения
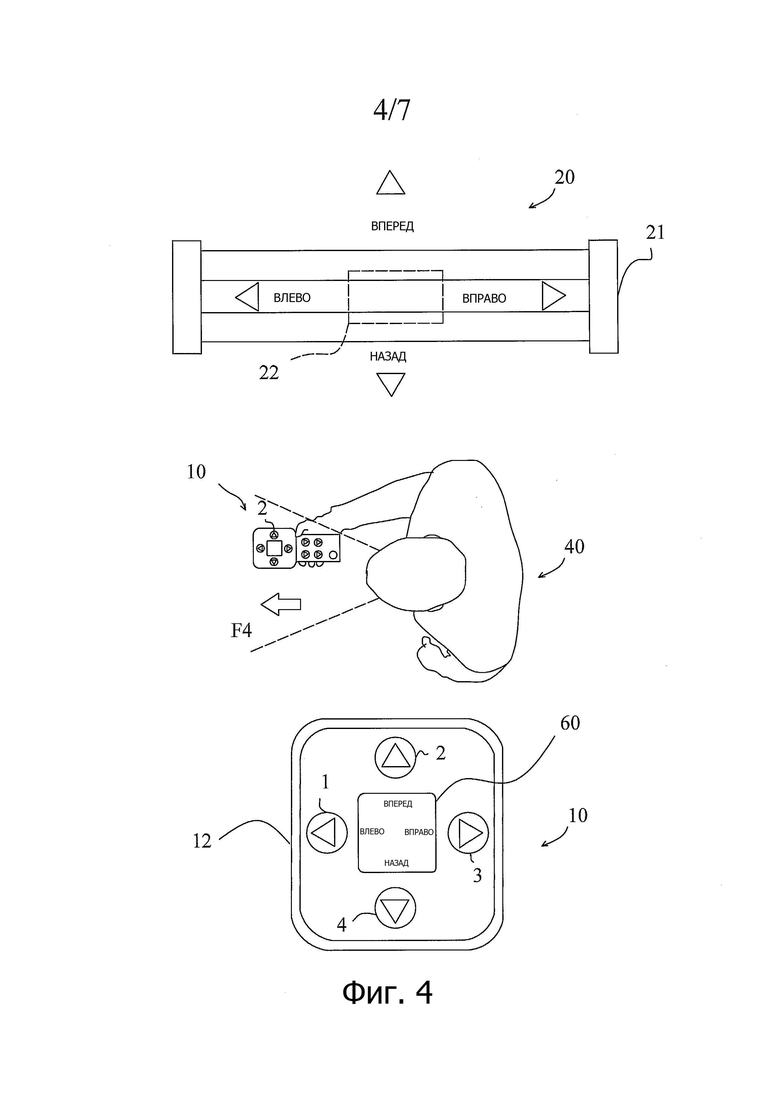
На фиг. 1-7 представлено устройство 10 управления, работающее с подъемным устройством, в частности, с мостовым краном.
Мостовой кран 20 содержит мост 21, способный перемещаться в первом горизонтальном направлении, и тележку 22, способную перемещаться во втором горизонтальном направлении, перпендикулярном первому направлению, и несущую поднятый вверх груз, равно как, например, табличку 23, ассоциированную с мостовым краном 20, эта табличка содержит набор указаний, читаемых оператором и иллюстрирующих, в частности, четыре рабочих направления, а именно «Вперед», «Назад», «Вправо», «Влево».
Например, индикация «Вперед» и «Назад» может указывать возможные направления перемещения мостового крана в целом, тогда как индикация «Вправо» и «Влево» может указывать возможные направления перемещения одной части мостового крана 20, в частности, тележки 22.
На фиг. 1 также виден оператор 40, который использует устройство 10 управления согласно настоящему изобретению, и также показано увеличенное изображение квадранта 12 устройства 10 управления, этот квадрант показывает кнопки 1, 2, 3 и 4 для активизации мостового крана 20 согласно четырем рабочим направлениям.
Устройство 10 управления может также содержать дисплей 60, используемый для информирования оператора 40 о функциях различных кнопок, включая кнопки 1 – 4 направлений, или для представления другой информации, такой как сигналы о неисправностях или сбоях или иная информация.
Основные компоненты схемы устройства 10 управления согласно одному из вариантов настоящего изобретения показаны на фиг. 7.
В частности, внутри корпуса 14, устройство управления содержит модуль 100 управления, соединенный с инерциальной платформой 26, где модуль 100 управления осуществляет управление функциями модуля 27 переназначения для кнопок 1, 2, 3 и 4 устройства 10 управления.
В частности, инерциальная платформа 26, содержащая акселерометр 34 с тремя измерительными осями и гироскоп 36 с тремя измерительными осями, где указанными компонентами может управлять указанный модуль 100 управления, оснащена микропроцессором.
Инерциальная платформа 26 помещена внутри корпуса 14 устройства 10 управления и поэтому прикреплена к этому же устройству управления и записывает его перемещения.
Если обратиться теперь к инерциальной платформе 26, то можно видеть, что акселерометр 34 с тремя измерительными осями способен измерять угол бокового наклона (крена) (а именно, угол поворота устройства управления вокруг оси X, показанный на фиг. 6) и угол продольного наклона (тангажа) (а именно, угол поворота устройства управления вокруг оси Y, показанный на фиг. 6) устройства 10 управления.
Однако измерения посредством акселерометра с тремя измерительными осями показывают только наклон устройства 10 управления в пространстве, но не содержат информации относительно направления, в котором ориентировано это устройство 10 управления, поскольку поворот устройства 10 управления вокруг вертикальной оси Z (фиг. 6) не вызывает изменения угла, который образуют оси X и Y с горизонтальной плоскостью.
Для получения полного представления о перемещениях устройства 10 управления инерциальная платформа 26 содержит также гироскоп 36.
Как известно, гироскоп 36 представляет собой измерительный прибор, имеющий тенденцию сохранять фиксированное направление ориентации своей оси вращения в пространстве и потому позволяющий измерять угловую скорость относительно такого фиксированного направления.
В частном случае три оси гироскопа 36 с тремя измерительными осями совпадают с тремя осями акселерометра 34.
Таким образом, сочетание информации, полученной из результатов измерений, выполненных акселерометром 34 и гироскопом 36, может быть использовано для определения полной ориентации устройства управления в пространстве.
Наконец, инерциальная платформа 26 содержит также магнитометр 38 с тремя измерительными осями.
Как известно, магнитометр представляет собой измерительный прибор, который измеряет составляющую магнитного поля, ориентированную вдоль какого-либо конкретного направлению в пространстве.
В случае использования магнитометра 38 с тремя измерительными осями можно перейти к измерениям составляющих поля вдоль трех независимых направлений, чтобы однозначно определить вектор магнитного поля в точке, где выполнены измерения.
Резюмируя, с целью оценки ориентации устройства управления относительно фиксированной декартовой системы координат, содержащей три взаимно перпендикулярных оси, описываемое устройство управления содержит три типа измерительных приборов:
- Акселерометр с тремя измерительными осями: измеряет составляющие ускорения устройства управления вдоль трех осей;
- Магнитометр с тремя измерительными осями: измеряет составляющие магнитного поля вдоль трех осей;
- Гироскоп с тремя измерительными осями: измеряет угловую скорость поворота устройства управления вокруг трех осей.
Модуль 100 управления также способен представлять сообщения на дисплее 60 устройства 10 управления, например, сообщения, согласующие направление, обозначенное кнопками, с соответствующим сообщением, которое видно на табличках на мостовом кране, либо с предупреждающими сообщениями или сообщениями о неисправностях.
Модуль 100 управления способен также включить визуальный и/или звуковой сигнал 25 в случае необходимости, как будет лучше пояснено далее.
В описываемом варианте модуль 100 управления вместе с инерциальной платформой 26 располагается внутри устройства 10 управления.
В дополнение к этому, устройство 10 управления может работать дистанционно или может быть соединено кабелем с машиной.
В первой фазе использования устройства 10 управления необходимо перейти к фазе настройки этого устройства управления, которая может быть выполнена, например, в соответствии со следующим режимом (фиг. 1).
Кнопка 1 ассоциирована с функцией «Вперед», соответствующей индикации стрелки «Вперед», напечатанной на табличках, и области между векторами, соответствующими углам 315° и 45°, считая, что значение 360° совмещено с направлением вверх на фиг. 1.
Кнопка 2 ассоциирована с функцией «Вправо», соответствующей, с учетом ориентации, показанной на фиг. 1, сектору между углами 45° и 135°.
Кнопка 3 ассоциирована с функцией «Назад», соответствующей, с учетом ориентации, показанной на фиг. 1, сектору между углами 135° и 225°.
Кнопка 4 ассоциирована с функцией «Влево», соответствующей, с учетом ориентации, показанной на фиг. 1, сектору между углами 225° и 315°.
Используя сочетание направлений, определяемое инерциальной платформой 26 и магнитометром 38, можно создать устройство управления, модифицирующее функции кнопок подъемного устройства в функции от ориентации этого устройства 10 управления.
На деле, кнопки, ассоциированные с перемещениями «Вперед», «Назад», «Вправо», «Влево», стали кнопками, определяющими функции перемещения, изменяющиеся в зависимости от ориентации устройства управления в пространстве.
В случае поворота устройства управления кнопки 1, 2, 3 и 4 будут предполагать и активизировать перемещение подъемного устройства, совпадающее с направлением, указываемым кнопками в данный конкретный момент.
Эта функция перемещения будет оставаться активной до тех пор, пока соответствующая кнопка остается нажатой.
Поэтому, когда выполнена настройка, согласно которой кнопка 1 ассоциирована с функцией перемещения «Вперед», при изменении ориентации устройства 10 управления, как это определит инерциальная платформа, эта же кнопка примет другую функцию, назначенную этому сектору.
При повороте устройства управления кнопки направлений всегда будут соответствовать направлению, принятому оператором.
То же самое будет происходить при нажатии кнопки, стрелка которой указывает направление вправо, мостовой кран 20 или тележка будут перемещаться вправо от оператора.
Фактически, перемещение груза всегда будет соответствовать направлению, обозначенному стрелками на кнопках, как бы ни были ориентированы устройство управления и/или оператор.
На практике, какой бы ни была ориентация устройства управления относительно мостового крана 20, перемещение, осуществляемое самим мостовым краном и тележкой, всегда будет соответствовать индикации стрелки на устройстве 10 управления, хотя и соответствует табличке, нанесенной на мостовой кран.
Когда настройка уже выполнена, до тех пор, пока оператор 40 сохраняет ориентацию устройства 10 управления по существу согласно направлению F1, показанному на фиг. 1, кнопки, назначенные модулем 27 переназначения кнопок, будут продолжать функционировать таким же образом.
Если вместо этого оператор повернется на 90° градусов вместе с самим устройством 10 управления или повернет только устройство 10 управления на 90° вправо (направление F2 на фиг. 2):
- кнопке 4 модуль 27 переназначения кнопок назначит функции кнопки 1, а именно «Вперед»;
- кнопке 3 модуль 27 переназначения кнопок назначит функции кнопки 4, а именно «Влево»;
- кнопке 2 модуль 27 переназначения кнопок назначит функции кнопки 3, а именно «Назад»; и
- кнопке 1 модуль 27 переназначения кнопок назначит функции кнопки 2, а именно «Вправо».
Такое переназначение функций может происходить автоматически, поскольку, после поворота устройства 10 управления в горизонтальной плоскости, алгоритм, описанный ниже, вычисляет значение нового направления и сообщает его модулю 100 управления, который тогда передает соответствующие команды модулю 27 переназначения кнопок.
Если вместо этого оператор повернется на 180° градусов вместе с самим устройством 10 управления относительно первоначального направления или повернет только устройство 10 управления на 180° относительно первоначального направления (направление F3 на фиг. 3):
- кнопке 3 модуль 27 переназначения кнопок назначит функции кнопки «Вперед»;
- кнопке 4 модуль 27 переназначения кнопок назначит функции кнопки «Вправо»;
- кнопке 1 модуль 27 переназначения кнопок назначит функции кнопки «Назад»; и
- кнопке 2 модуль 27 переназначения кнопок назначит функции кнопки «Влево».
Наконец, если оператор повернется на 270° градусов относительно первоначального направления (или на 90° влево от себя) вместе с самим устройством 10 управления или повернет только устройство 10 управления на 270° относительно первоначального направления (направление F4 на фиг. 4):
- кнопке 4 модуль 27 переназначения кнопок назначит функции кнопки «Назад»;
- кнопке 1 модуль 27 переназначения кнопок назначит функции кнопки «Влево»;
- кнопке 2 модуль 27 переназначения кнопок назначит функции кнопки «Вперед»; и
- кнопке 3 модуль 27 переназначения кнопок назначит функции кнопки «Вправо».
Как можно догадаться, устройство 10 управления всегда осуществляет перемещения в соответствии с направлением, обозначенным кнопкой или кнопкой со стрелкой, относительно направления, принятого самим устройством 10 управления относительно мостового крана 20.
Кнопки, какой бы ни была ориентация устройства управления относительно мостового крана 20, всегда будут соответствовать тому, что обозначено на табличках.
Кнопка 1 будет по умолчанию иметь функцию «Дальше», соответствующую табличкам.
После поворота устройства управления на 90° или к ориентации внутри сектора активности +45° или -45° относительно оси 90°, кнопка 1 будет иметь функцию «Влево», соответствующую табличкам.
Далее, после поворота устройства управления до 180° или к ориентации внутри сектора активности +45° или -45° относительно оси 180° кнопка 1 будет иметь функцию «Назад», соответствующую табличкам.
Далее, после поворота устройства управления до 270° или к ориентации внутри сектора активности +45° или -45° относительно оси 270° кнопка 1 будет иметь функцию «Вправо», соответствующую табличка.
После поворота на 360° кнопка 1 будет по умолчанию иметь функцию «Вперед».
Секторы активности были определены в терминах +45° или -45° относительно центральной оси, но это сделано здесь только в качестве неограничивающего примера, поскольку требования определить переназначение направлений перемещения подъемного устройства или его компонента, инициируемых всеми кнопками, на основе информации, предоставляемой инерциальной платформой относительно ориентации устройства управления в пространстве, являются конфигурируемыми посредством программного обеспечения.
Устройство управления может быть оснащено дисплеем, показывающим новые функции, принимаемые кнопками или кнопками со стрелками.
В случае отказа или системной ошибки дисплей покажет функцию «Вперед» по умолчанию, а соответствующая кнопка или кнопка со стрелкой примет функцию по умолчанию, соответствующую табличкам.
Это значительно упрощает действия оператора 40, даже если он не является экспертом, что позволяет избежать ошибок в управлении, которые могли бы вызвать повреждения людей или имущества.
Ориентация кнопок всегда и в любом случае будет указывать направление, в котором нужно переместить груз.
Модуль 100 управления в устройстве 10 управления может также содержать средства для определения расстояния от этого модуля до опорной точки на подъемном устройстве, например, посредством ультразвукового дальномера 80, а именно дальномера, использующего время, которое требуется пакетам акустических импульсов с высокой частотой, излучаемых самим дальномером, для достижения мишени, помещенной на мостовой кран, и возвращения к дальномеру. В качестве альтернативы могут быть использованы дальномеры 44 других типов, известных в технике.
Другое устройство, входящее в состав устройства 10 управления представляет собой аварийную кнопку 50, которая, при нажатии, может запустить оповещение посредством компьютера, установленного на машине и связанного с устройством управления посредством Wi-Fi.
Если компьютер примет этот сигнал от кнопки, он активизирует подходящий звуковой и/или визуальный сигнал 25 тревоги и передаст запрос помощи, указывающий место, где нужна помощь, посредством SMS или через Интернет.
Поскольку устройство 10 управления работает в пространстве X, Y, Z (как это схематично представлено на фиг. 6), то благодаря наличию инерциальной платформы 26, модуль 100 управления оказывается всегда информирован об ориентации этого устройства 10 управления, в частности, когда это устройство не располагается совершенно горизонтально, и в таком случае устройство управляет соответствующими соединениями. Таким образом, какую бы ориентацию в пространстве ни имело устройство 10 управления, это устройство может работать так, как если бы оно располагалось на двух осях X и Y, определяющих горизонтальную плоскость.
В случае неисправности или сбоя устройства 10 управления модуль 100 управления способен управлять дисплеем 60 устройства 10 управления для представления предупреждающего сообщения, например, «Устройство управления не работает» или «Устройство управления работает только обычным способом», так что это последнее сообщение может появляться тогда, когда система управления функциями кнопок с использованием инерциальной платформы, была отключена.
В одном из вариантов настоящего изобретения в случае неисправности или сбоя устройства управления оно может быть присоединено к подъемному устройству или машине посредством кабеля и продолжать работу в качестве кабельного устройства управления.
В другом варианте настоящего изобретения вместо устройства 10 управления, описанного выше, можно использовать одну кнопку, работающую согласно различным направлениям, так что концепция изобретения, описанная выше, применима также в этом случае, в частности, эта кнопка способна осуществлять функции «Вперед», «Назад», «Вправо» и «Влево».
В следующем варианте настоящего изобретения вместо устройства 10 управления, как описано выше, можно использовать джойстик или другое подобное устройство, где командный элемент этого устройства содержит ручку, которую можно перемещать в нескольких направлениях «Вперед», «Назад», «Вправо» и «Влево».
Разработанный алгоритм способен оценивать ориентацию устройства управления и вследствие этого изменять функцию кнопок.
Согласно настоящему изобретению система также предлагает методологию того, как сделать систему устойчивой к возможным магнитным возмущениям, вызываемым, например, массами металла значительного размера, расположенными рядом с устройством 10 управления, или другими факторами, и способным исказить оценку ориентации, в частности, повлияв на результаты измерений магнитометра 38.
Этот алгоритм может быть разделен на две фазы:
1. Оценка положения, устойчивого к магнитным возмущениям
2. Вычисление «курсового» угла (пеленга), а именно, ориентации устройства управления.
Более подробно, со ссылками на Фиг. 9, способ содержит следующие этапы:
- предварительная оценка положения устройства управления с использованием данных от акселерометра 34 и от магнитометра 38 (блок 200);
- обновление предварительной оценки положения устройства управления с использованием данных от гироскопа (блок 300).
С целью математического представления поворотов устройства управления компактным образом, описываемый здесь способ предлагает представить ориентации и повороты устройства управления с использованием кватернионов, а именно, гиперкомплексных чисел, каждое из которых имеет три мнимые составляющие и действительную составляющую, что позволяет представить трехмерные ориентации объекта без проблем с сингулярностью, таких как явление, известное под названием «шарнирный замок», способное возникать при использовании так называемых узлов Эйлера, известных под названиями угол крена, угол тангажа и угол рыскания.
Кватернионы имеют также то преимущество, что они используют только четыре параметра.
Как известно, кватернион представляет собой гиперкомплексное число, определяемое следующим образом:

Таким образом, кватернион q имеет действительную часть, а именно  , и векторную часть
, и векторную часть  , эту часть можно рассматривать в качестве вектора, образованного из составляющих обычного вектора в трехмерном пространстве.
, эту часть можно рассматривать в качестве вектора, образованного из составляющих обычного вектора в трехмерном пространстве.
Основное свойство кватерниона определено следующими соотношениями:

Эти соотношения показаны подробно в следующей мультипликативной таблице:
Таблица 1
В дополнение к этому, результат  комплексного сопряжения кватерниона может быть определен как:
комплексного сопряжения кватерниона может быть определен как:

где направление собственного вектора комплексно-сопряженного кватерниона противоположно направлению собственного вектора исходного кватерниона q.
Произведение кватерниона q на комплексно-сопряженный ему кватернион  дает действительное число, вычисляемое по следующей формуле:
дает действительное число, вычисляемое по следующей формуле:

Кватернионы используются для представления, компактным образом, произвольной ориентации системы B координат относительно системы A координат, например поворота на угол θ относительно единичного вектора , определенного в системе A координат, как показано в примере, представленном на фиг. 8
Кватернион, описывающий такую ориентацию, может быть обозначен как  и определен следующим уравнением:
и определен следующим уравнением:
= 
где rx, ry и rz определяют составляющие единичного вектора относительно осей X, Y и Z системы A координат.
Наконец, умножение двух кватернионов обычно обозначают символом  , и произведение может быть использовано для определения композиции из двух или более ориентаций.
, и произведение может быть использовано для определения композиции из двух или более ориентаций.
Например, с учетом двух ориентаций и , сложная ориентация, обозначенная
, сложная ориентация, обозначенная  , может быть определена:
, может быть определена:
В терминах составляющих произведение двух кватернионов a и b может быть вычислено по правилу Гамильтона:

Произведение двух кватернионов не является инвариантом относительно перестановки, а именно, в общем случае 
Это отражает тот факт, что композиция из двух ориентаций может дать, в общем случае, результирующую ориентацию, которая может различаться в зависимости от порядка реализации ориентаций.
Трехмерный вектор может быть повернут посредством кватерниона с использованием следующего соотношения:
где  и
и  представляют один и тот же вектор соответственно в системе A координат и в системе B координат.
представляют один и тот же вектор соответственно в системе A координат и в системе B координат.
Для перехода к предварительной оценке ориентации устройства управления, начиная от результатов измерений, полученных от акселерометра 34 и магнитометра 38, необходимо получить кватернион, который позволил бы совместить результаты магнитных и акселерометрических измерений с соответствующими гравитационными и магнитными полями.
Для этого используется алгоритм минимизации, в частности, алгоритм градиентного спуска, где это выражение обозначает алгоритм, минимизирующий функцию с использованием градиента этой функции, начиная от конкретной стартовой точки, к искомой точке минимума, посредством итераций с отрицательными шагами, пропорциональными градиенту, вычисленному в текущей точке.
Минимизируемая функция имеет следующий вид:

где  обозначает фиксированный референсный интеграл в земной системе координат и
обозначает фиксированный референсный интеграл в земной системе координат и  обозначает референсный вектор в трехосной системе координат для датчиков.
обозначает референсный вектор в трехосной системе координат для датчиков.
В частности, для акселерометра 34 функция, которую нужно минимизировать, может быть выражена как  , где
, где  обозначает вектор, составленный из результатов измерений акселерометрического датчика.
обозначает вектор, составленный из результатов измерений акселерометрического датчика.
Аналогично, для магнитометра 38 функция, которую нужно минимизировать, может быть выражена как  , где
, где обозначает фиксированный референсный интеграл для магнитного поля Земли, а
обозначает фиксированный референсный интеграл для магнитного поля Земли, а  обозначает вектор, составленный из результатов измерений магнитометра 38.
обозначает вектор, составленный из результатов измерений магнитометра 38.
Поэтому, для поиска кватерниона, выражающего ориентацию устройства управления, отталкиваясь только от результатов измерений магнитометра 38 и акселерометра 34, необходимо объединить функции, подлежащие минимизации, и перейти к оценке кватерниона с использованием обоих датчиков, например, с применением алгоритма градиентного спуска. В этом случае опорный вектор будет составлен из 6 величин, равно как и вектор результатов измерений датчиков.
Результатом является один кватернион  , наилучшим образом представляющий такой поворот с такими данными.
, наилучшим образом представляющий такой поворот с такими данными.
Вторая часть способа согласно одному из вариантов настоящего изобретения предлагает обновление предварительной оценки кватерниона, представляющего ориентацию устройства управления с использованием данных от гироскопа.
Предпочтительный вариант предлагает объединение информации от гироскопа с информацией, поступающей от предварительной оценки ориентации, полученной на основе результатов измерений акселерометра 34 и магнитометра 38 с использованием расширенного фильтра Калмана.
Как известно, фильтр Калмана представляет собой рекурсивный алгоритм, позволяющий оценить состояние, характеризующее динамическую систему, начиная от наблюдений состояния, которые не являются полностью надежными, поскольку подвержены воздействию шумов.
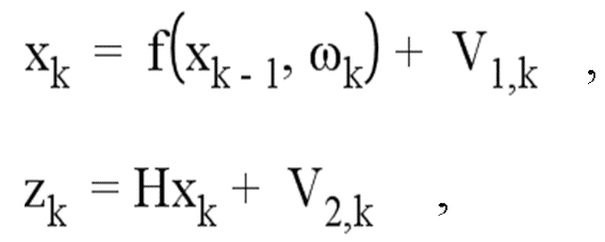
В этом случае модель, используемая для определения фильтра Калмана, имеет вид:

где X обозначает вектор состояния, образованный четырьмя составляющими кватерниона  , представляющего полученную ориентацию, начиная только от результатов измерений магнитометра 38 и акселерометра 34, H обозначает единичную матрицу 4x4,
, представляющего полученную ориентацию, начиная только от результатов измерений магнитометра 38 и акселерометра 34, H обозначает единичную матрицу 4x4,  представляет шумы процесса, которые, предполагается, выводятся из нормального распределения с дисперсией, выраженной матрицей Q,
представляет шумы процесса, которые, предполагается, выводятся из нормального распределения с дисперсией, выраженной матрицей Q,  представляет шумы измерений, которые, предполагается, выводятся из нормального распределения с дисперсией, выраженной матрицей R.
представляет шумы измерений, которые, предполагается, выводятся из нормального распределения с дисперсией, выраженной матрицей R.
Переходная функция  основана на следующем уравнении, которое связывает результаты ω измерений гироскопа с производной кватерниона:
основана на следующем уравнении, которое связывает результаты ω измерений гироскопа с производной кватерниона:
Для того чтобы оценку сделать устойчивой также в случае магнитных шумов, было исследовано решение на основе вычисления модуля магнитного поля.
Магнитное поле Земли имеет почти постоянный модуль около 45 нТл.
Когда магнитные шумы увеличиваются или уменьшаются (кривая M на фиг. 10), принимаются меры по коррекции результатов магнитометрических измерений.
Как видно на фиг. 10, можно выделить две рабочие области:
- в ограниченной пороговыми величинами B и C области безопасности вокруг величины, определяемой кривой A, матрицы Q и R изменяются линейно, что сообщает больше доверительности оценке от магнитометра;
- вне области, ограниченной пороговыми величинами B и C, магнитные возмущения считаются слишком сильными, так что результаты магнитометрических измерений более не используются в фазе предварительной оценки. Вместо этого в фильтре Калмана используются матрицы Q и R, обеспечивающие меньший уровень доверительности предварительной оценки.
Это позволяет сделать так, чтобы магнитные возмущения не влияли на оценку положения устройства управления.
Таким образом, получают оценку кватерниона  , выражающего положение устройства управления.
, выражающего положение устройства управления.
Курсовой угол, а именной угол, образованный выбранной системой координат и направлением, куда указывает устройство управления, можно вычислить с использованием составляющих кватерниона, оцененных ранее с использованием следующего уравнения:
где q0, q1, q2 и q3 – составляющие кватерниона , оцененные посредством фильтра Калмана.
На основе этого курсового угла определены четыре квадранта с раскрывом 90° каждый, что позволяет идентифицировать направление, куда указывает устройство управления, и, следовательно, при необходимости, позволяет изменять направление, ассоциированное с каждой кнопкой, в соответствии с описываемыми выше режимами.
Когда получен курсовой угол, предпочтительно определяют зоны допуска вокруг границ квадрантов, показанных на фиг. 5 и расположенных под углами 45°, 135°, 225° и 315° относительно курсового угла.
Когда курсовой угол устройства управления расположен в пределах зон допуска, предпочтительно сохраняют предыдущую конфигурацию до тех пор, зона управления не повернется, выйдя из зоны допуска в соседний квадрант.
Для обеспечения большей безопасности в процессе использования можно добавить различные световые, звуковые и вибрационные сигналы в соответствии с ситуацией инерциального устройства управления, как например, сигнал, предупреждающий об изменении конфигурации кнопок, и сигнал, предупреждающий, когда ориентация устройства управления пересекла одну из указанных четырех границ, что определяет смену квадранта.
Устройства управления, описанные выше, могут быть применены, помимо подъемных устройств, к другим машинам, строительному оборудованию, станкам или другим подобным машинам.
Очевидно, что в настоящее изобретение, как оно описано здесь выше, могут быть внесены модификации или усовершенствования, диктуемые обстоятельствами или специальными мотивами, без выхода изобретения за пределы объема испрашиваемой охраны, определенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ РАСКАЧИВАНИЕМ ГРУЗА, ПОДВЕШЕННОГО НА ПОДЪЕМНОМ УСТРОЙСТВЕ | 2014 |
|
RU2676210C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2016 |
|
RU2698281C2 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
| Способ измерения величины тортиколлиса у пациентов с косоглазием | 2023 |
|
RU2830641C1 |
Предложен способ оценки положения устройства управления, предназначенного для управления рабочими машинами. Устройство управления содержит средства для управления перемещением рабочей машины вдоль соответствующих направлений. Устанавливают заданный диапазон значений магнитного поля в отношении магнитного поля Земли. Выполняют предварительную оценку положения устройства управления с использованием данных акселерометра и магнитометра, установленных в устройстве управления. Обновляют предварительную оценку положения устройства управления с использованием данных гироскопа, установленного в устройстве управления. Если измеренные магнитометром значения магнитного поля находятся вне заданного диапазона значений магнитного поля, результаты измерений магнитометра не учитывают на этапе предварительной оценки положения устройства управления. Предложен также способ управления рабочей машиной. Достигается определение положения устройства управления, повышение безопасности использования подъемных машин, компенсация магнитных возмущений. 2 н. и 8 з.п. ф-лы, 10 ил., 1 табл.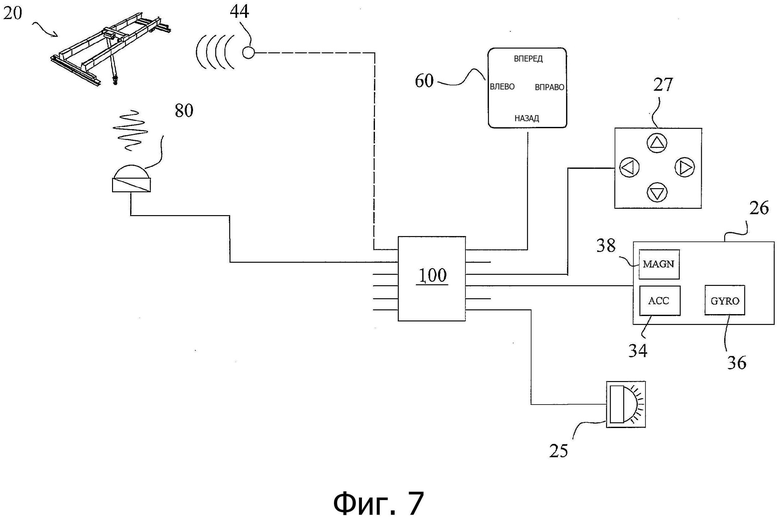
1. Способ оценки положения устройства управления (10), предназначенного для управления рабочими машинами (20), причем устройство управления (10) содержит средства для управления перемещением рабочей машины (20) вдоль соответствующих направлений, содержащий этапы, на которых:
- устанавливают заданный диапазон значений магнитного поля в отношении магнитного поля Земли;
- выполняют предварительную оценку положения устройства управления (10) с использованием данных акселерометра (34) и магнитометра (38), установленных в устройстве управления (10);
- обновляют предварительную оценку положения устройства управления (10) с использованием данных гироскопа (36), установленного в устройстве управления (10); и
- если измеренные магнитометром (38) значения магнитного поля находятся вне заданного диапазона значений магнитного поля, результаты измерений магнитометра (38) не учитывают на этапе предварительной оценки положения устройства управления.
2. Способ по п. 1, в котором предварительную оценку положения устройства управления (10) выполняют путем оценки кватерниона  представляющего указанное положение, при этом кватернион
представляющего указанное положение, при этом кватернион  оценивают путем минимизации функции, коррелирующей кватернион с опорным вектором или с вектором результатов измерений, полученных от акселерометра (34) и магнитометра (38).
оценивают путем минимизации функции, коррелирующей кватернион с опорным вектором или с вектором результатов измерений, полученных от акселерометра (34) и магнитометра (38).
3. Способ по п. 2, в котором минимизацию выполняют с применением алгоритма градиентного спуска.
4. Способ по п. 2, в котором обновляют предварительную оценку положения устройства управления (10) с использованием данных гироскопа (36) посредством расширенного фильтра Калмана, что позволяет оценить кватернион  , описывающий положение устройства управления (10).
, описывающий положение устройства управления (10).
5. Способ по п. 2, в котором расширенный фильтр Калмана определяют следующими уравнениями:
где вектор x образован составляющими кватерниона  описывающего положение устройства управления (10), параметр
описывающего положение устройства управления (10), параметр  состоит из результатов измерений гироскопа (36), H - единичная матрица 4X4,
состоит из результатов измерений гироскопа (36), H - единичная матрица 4X4,  и
и  представляют соответственно шумы процесса и шумы измерений, дисперсии которых определяются соответственно матрицей Q дисперсии шумов и матрицей R дисперсии измерений фильтра Калмана, а переходная функция
представляют соответственно шумы процесса и шумы измерений, дисперсии которых определяются соответственно матрицей Q дисперсии шумов и матрицей R дисперсии измерений фильтра Калмана, а переходная функция  основана на уравнении
основана на уравнении  , которое коррелирует величины углов ω положения, измеренных гироскопом, с производной кватерниона .
, которое коррелирует величины углов ω положения, измеренных гироскопом, с производной кватерниона .
6. Способ по п. 2, в котором применяют корректирующие средства к результатам измерений магнитометра (38).
7. Способ по п. 6, в котором, если измеренные магнитометром (38) значения магнитного поля содержатся в заданном диапазоне в отношении магнитного поля Земли, матрицы Q и R фильтра Калмана изменяют линейно, для того чтобы обеспечить более достоверную предварительную оценку от магнитометра (38).
8. Способ по п. 6, в котором, если измеренные магнитометром (38) значения магнитного поля не содержатся в заданном диапазоне в отношении магнитного поля Земли, матрицы Q и R фильтра Калмана изменяют линейно, для того чтобы обеспечить более достоверную оценку от гироскопа (36).
9. Способ по п. 6, в котором курсовой угол устройства управления (10) вычисляют по следующей формуле:
где q0, q1, q2 и q3 обозначают составляющие кватерниона  , оцененного посредством фильтра Калмана.
, оцененного посредством фильтра Калмана.
10. Способ управления рабочей машиной в соответствии с различными направлениями перемещения с использованием устройства управления (10), включающий этапы, на которых:
- оценивают курсовой угол устройства управления (10) согласно способу по любому из пп. 1-9;
- переназначают функции управления устройства управления (10) в зависимости от курсового угла устройства управления (10).
| DE 102012021422 A1, 30.04.2014 | |||
| RU 2011152448 A, 27.06.2013 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2278356C1 |

