Область техники
Настоящее изобретение относится к технике электрического управления и испытаний. На основании техники виртуального инструмента и техники цифрового управления DSP (процессора цифрового сигнала) предложены интеллектуальная система комплексной разработки и испытания для преобразователя высокого напряжения и способ создания данной системы.
Уровень техники
Преобразователь высокого напряжения является важным изделием для экономии энергии и снижения выбросов. Он широко применяется потребителями различных отраслей техники. На рынке, кроме эффективной экономии энергии и низкой себестоимости преобразователя высокого напряжения, пользователи обращают внимание на качество и надежность изделия. Если качество преобразователя невысоко, то использование его неэффективно. Возникающие потери могут нейтрализовать или превысить ожидаемую пользу от экономии энергии. В настоящее время топологическая структура главной электроцепи преобразователя высокого напряжения достаточно развита, его главные детали импортируются, например, IGBT (биполярный транзистор с изолированным затвором), электроемкость и т.д. Поэтому качество преобразователя высокого напряжения зависит от техники управления и программирования соответствующего программного обеспечения.
Разработка преобразователя высокого напряжения делится на две части: разработка хардвера и разработка программного обеспечения. По причине высокой трудоемкости требуется большое количество инженеров для выполнения разработки двух систем. Для обеспечения качества разработки, кроме самого комплекта совершенной системы исследования, каждый инженер должен обладать знаниями и строго соблюдать данную систему исследования. Если исследователь плохо знает систему разработанного изделия, то ему приходится беспрерывно проводить выбор параметров управления, проектирование программы, изменение программы, компиляцию, соединение, копирование, испытание, регулирование параметров и т.д. Эти процессы сложны, поэтому эффективность работы низка. При диагностике неисправности трудно найти место неисправности. Иногда разработчик сам является виновником различных потенциальных аварий, снижения качества и надежности изделия, увеличения объема послепродажного обслуживания.
Сущность изобретения
Для решения существующих технических задач предложены интеллектуальная система комплексной разработки и испытания для преобразователя высокого напряжения и способ создания данной системы. В данной системе применена современная техника цифрового интеллектуального управления, техника виртуального инструмента, техника комплексного моделирования. Система обладает хорошей интегральной способностью, расширенными функциями и модульной конструкцией и может применяться в разных системах хардвера. Можно сократить период разработки изделия и напрямую изменять параметры управления. Можно также найти запись любого варианта и провести просмотр и печатание.
Указанная техническая задача решается следующим образом.
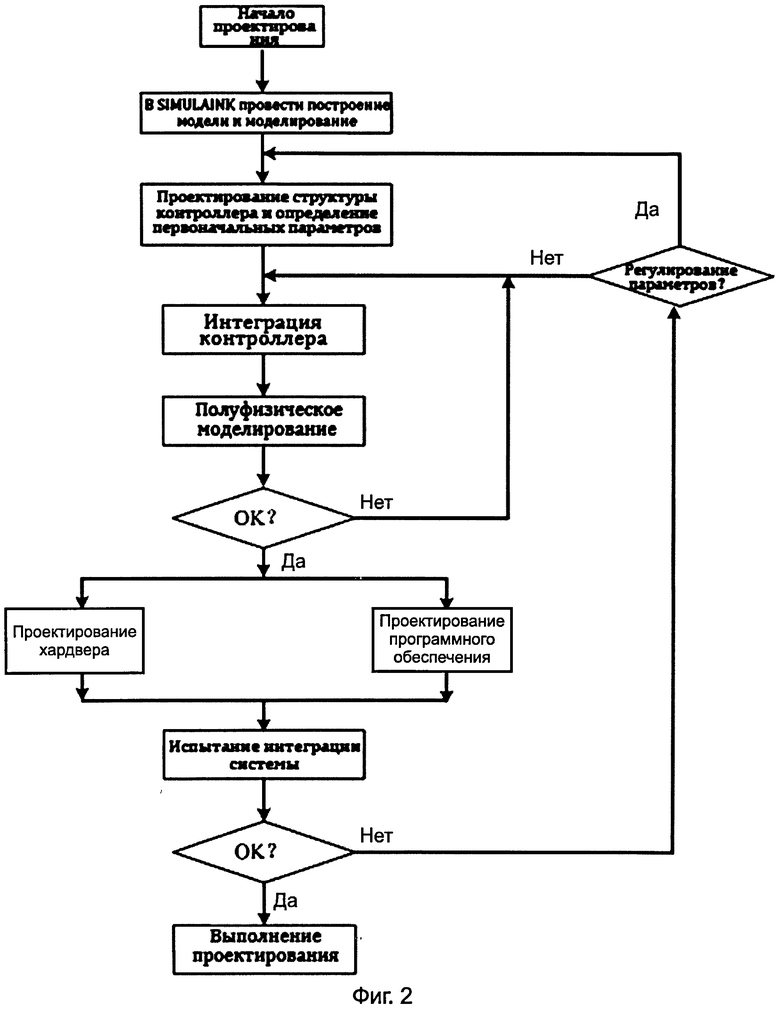
Для осуществления вышеуказанной технической задачи настоящее изобретение, во-первых, предлагает интеллектуальную систему комплексной разработки и испытания для преобразователя высокого напряжения. Данная система включает преобразователь высокого напряжения, электродвигатель, соединительную муфту, узел аналоговой нагрузки и PC (персональный компьютер). С помощью соединительной муфты электродвигатель соединен с узлом аналоговой нагрузки. Отличительные особенности: преобразователь высокого напряжения состоит из двух частей: элемента преобразования мощности и контроллера процессора цифрового сигнала DSP. Элемент преобразования мощности соединен с электродвигателем. Когда применяется подходящий метод широтно-импульсной модуляции, можно обеспечить для электродвигателя высокоэффективное электропитание низкой гармоники, и электродвигатель может действовать. Контроллер DSP соединен с PC. PC может изменять параметры сигнала управления. Узел аналоговой нагрузки состоит из двух частей: нагрузочного электродвигателя и контроллера нагрузочного электродвигателя. Контроллер нагрузочного электродвигателя соединен с PC. PC может изменять параметры управления, осуществляя управление нагрузочным электродвигателем и вызывая возникновение разной аналоговой нагрузки.
Преобразователь высокого напряжения и электродвигатель соединены с измерителем электрических параметров. С помощью линии передачи данных измеритель электрических параметров соединен с PC, чтобы передавать на PC следующие параметры: напряжение, ток, потери, коэффициент мощности, напряжение на шинах постоянного тока при холостом ходе испытываемой системы, напряжение, ток, потери, коэффициент мощности, напряжение на шинах постоянного тока при нагрузке системы, и проводить в PC анализ данных и показаний, выполнять черчение, осуществлять вычерчивание таблиц, печатание и т.д.
Электродвигатель и нагрузочный электродвигатель узла аналоговой нагрузки соединены с измерителем оборотов и вращающего момента. С помощью линии передачи данных измеритель оборотов и вращающего момента соединен с PC, чтобы передавать на PC полученные параметры: обороты, угловое ускорение, вращающий момент электродвигателя и нагрузочного электродвигателя. Это позволяет проводить анализ данных и показаний, выполнять черчение, осуществлять вычерчивание таблиц, печатание и т.д.
PC соединен также с печатающим выходным устройством, чтобы иметь возможность при необходимости распечатать различные электрические параметры, механические параметры, соответствующие кривые, графики, отчеты об испытании и т.д.
В PC установлены программное обеспечение для аналогового моделирования, программное обеспечение для разработки, программное обеспечение для обработки данных и программное обеспечение для связи. Их главные функции: моделирование электроцепи хардвера преобразователя высокого напряжения, моделирование параметров системы управления преобразователя высокого напряжения, аналоговое моделирование системы, обработка сигнала электрических параметров, обработка сигнала параметров оборотов и вращающего момента, управление преобразователем, управление аналоговой механической нагрузкой, отладка и запись программного обеспечения управления преобразователя, драйвер печатающего устройства и т.д.
В PC установлено согласование связи программного обеспечения. Разработчик может составить программу управления с помощью языка С или языка ассемблера. С помощью PC можно непосредственно установить программу управления после компиляции в контроллере DSP и провести цифровое управление в режиме реального времени.
В PC установлено программное обеспечение моделирования - пакет прикладных программ MATLAB/SIMULINK. При проектировании системы управления с помощью MATLAB/SIMULINK в PC можно обеспечить, чтобы электродвигатель проводил моделирование с помощью привода преобразователя высокого напряжения, а также осуществлять отладку и выбор параметров контроллера DSP, анализ сигнала.
В PC установлено также программное обеспечение dSPACE - пакет программного обеспечения с открытым источником. Программное обеспечение dSPACE предлагает окно, на котором можно связаться с программным обеспечением моделирования MATLAB/SIMULINK. Пользователь может разработать правила управления в среде MATLAB/SIMULINK и провести аналогию системы. Потом установить разработанную программу управления в целевом процессоре и провести аналогию контура хардвера. С помощью среды окна «человек-компьютер» в PC и карты управления окном разработчик может выполнить проектирование аналоговой системы контура хардвера и на его основании провести технико-экономические оценки системы.
В PC установлено также программное обеспечение виртуального инструмента. Программное обеспечение виртуального инструмента может выявить способности компьютера. Оно имеет сильную функцию обработки данных. Можно производить приборы разных сильных функций. В соответствии с запросом пользователь может определять и производить разные приборы. Поэтому с помощью разных приборов наблюдения (например, осциллограф и т.д.) можно в режиме онлайн наблюдать разные варианты или параметры регулирования. Данные приборы наблюдения выполнены с помощью программного обеспечения виртуального инструмента.
Техническая задача настоящего изобретения - разработать способ создания интеллектуальной системы комплексной разработки и испытания для преобразователя высокого напряжения. Данный способ включает следующие шаги.
Шаг а). Устанавливают программное обеспечение моделирования MATLAB/SIMULINK в PC и создают математическую модель системы регулирования скорости преобразователя высокого напряжения.
Шаг б). Определяют структуру контроллера DSP и метод проектирования, при этом по шагу а) создают математическую модель и проводят моделирование, после чего получают первоначальные параметры контроллера DSP. Поскольку имитационная модель не соответствует действительной прикладной среде, то нужно проверить первоначальные параметры контроллера DSP. В случае традиционного проектирования и разработки это является сложным и трудоемким процессом. Необходимы большие людские и материальные ресурсы. В настоящем изобретении виртуальный инструмент и программное обеспечение моделирования MATLAB/SIMULINK образуют среду взаимной разработки и испытания и позволяют провести онлайновую отладку в режиме реального времени.
Шаг в). Регулируют параметры и осуществляют интеграцию контроллера DSP. Проектирование контроллера DSP включает проектирование хардвера и проектирование программного обеспечения. При проектировании хардвера надо учесть характер вычисления, цену, интерфейс, далее выбрать подходящий узел центрального процессора CPU. При проектировании программного обеспечения надо учесть дискретизацию, проектирование программы языка ассемблера, прерывание, обработку сигнала и т.д.
Шаг г). Устанавливают программное обеспечение виртуального инструмента в PC. В среде программного обеспечения моделирования MATLAB/SIMULINK в PC, которая упомянута на шаге а), проводят аналоговое испытание полуфизического моделирования.
Шаг д). В режиме онлайн регулируют и определяют первоначальные параметры управления, которые получены при аналоговом испытании полуфизического моделирования. На осциллографе виртуальной цифры виртуального инструмента наблюдают отклик системы после регулирования параметров управления.
Шаг е). С помощью аналогового испытания полуфизического моделирования испытывают свойства проектирования хардвера и проектирования программного обеспечения контроллера DSP.
Шаг ж). Проводят испытание интеграции системы: вводят разные программы управления в один элемент преобразования мощности. Например, разные программы самонастраивающегося управления и программы интеллектуального управления. Таким образом можно получить разные результаты управления и возможные прикладные эффекты. Далее проводят сопоставление и анализ. Программы управления, которые составили разные разработчики, или улучшенные программы записаны в контроллер DSP с помощью PC, обнаруживают ошибки в программе и проверяют эффекты. Таким образом осуществляют испытание интеграции целой системы.
Шаг з). Регулирование и определение всех параметров.
Преимущества настоящего изобретения: в PC установлены программное обеспечение аналогового моделирования, программное обеспечение виртуального инструмента, программное обеспечение обработки данных и программное обеспечение связи. В полуфизической среде можно применить технику аналогового моделирования и испытать все параметры при нагрузке системы, при этом не только уменьшить период разработки изделия, но и повысить безопасность и надежность системы.
Описание прилагаемых чертежей
На фиг.1 изображена полная схема конструкции интеллектуальной системы комплексной разработки и испытания для преобразователя высокого напряжения;
на фиг.2 - схема осуществления способа создания интеллектуальной системы комплексной разработки и испытания для преобразователя высокого напряжения.
Подробное описание изобретения
Для того чтобы легче понять предлагаемое техническое решение, особенности, цели и преимущества настоящего изобретения, ниже настоящее изобретение описано со ссылками на прилагаемые чертежи.
Изображенная на фиг.1 и 2 интеллектуальная система комплексной разработки и испытания для преобразователя высокого напряжения по настоящему изобретению включает испытуемый преобразователь высокого напряжения 1, испытуемый электродвигатель 2, соединительную муфту 3, узел аналоговой нагрузки 4, измеритель электрических параметров 7, измеритель оборотов и вращающего момента 8, принтер 9, PC 10 и т.д.
Преобразователь высокого напряжения 1 состоит из двух частей: элемента преобразования мощности 11 и контроллера DSP 12. Элемент преобразования мощности 11 соединен с электродвигателем 2. Применяя подходящий метод широтно-импульсной модуляции, можно получить высокоэффективное электропитание низкой гармоники для испытуемого электродвигателя, и испытуемый электродвигатель 2 может действовать. С помощью PC 10 можно предложить параметры сигнала управления контроллеру DSP 12 преобразователя высокого напряжения 1. В контроллере DSP 12 применяется чип управления серии TMS320f2407. Он обладает высокой способностью вычисления, полным окном управления, низкой ценой. Высший язык является средством для разработки. Можно программировать программное обеспечение и осуществлять различные функции управления. Это не только повышает гибкость, но и сокращает время разработки изделия. В предлагаемой системе применяется интеллектуальное, самонастраивающееся управление, возможность оценки цены, техника обработки сигнала и т.д. Это позволяет не только сочетать систему программного обеспечения с системой хардвера, но и осуществлять интеллектуальное управление с помощью регулирования программного обеспечения или параметров управления. В DSP есть особое окно связи JTAG. На эмуляторе (emulator), который проектирует TI, находят ошибки в программе. В начальный период разработки изделия данный эмулятор может содействовать поиску ошибок в программном обеспечении.
Узел аналоговой нагрузки 4 состоит из двух частей: нагрузочного электродвигателя 5 и контроллера нагрузочного электродвигателя 6. С помощью PC 10 можно предложить параметры управления контроллеру нагрузочного электродвигателя 6, управлять нагрузочным электродвигателем 5 и моделировать действия разных нагрузок. При этом можно не только моделировать нормальное действие, но и моделировать действия ускорения и торможения.
На измерителе электрических параметров 7 измеряют напряжение, ток, потери, коэффициент мощности, напряжение на шинах постоянного тока на холостом ходу, а также напряжение, ток, потери, коэффициент мощности, напряжение на шинах постоянного тока при нагрузке, далее передают их на PC 10 и проводят анализ данных, показаний, черчение, вычерчивание таблицы, печатание и т.д.
На измерителе оборотов и вращающего момента 8 измеряют обороты, угловое ускорение, вращающий момент, полученные от датчика оборотов и вращающего момента. Далее передают их на PC 10 и проводят анализ данных, показаний, черчение, вычерчивание таблицы, печатание и т.д.
В соответствии с требованиями на принтере 9 печатают различные электрические параметры, механические параметры, соответствующие кривые, графики, отчеты об испытании и т.д.
PC 10 является площадкой управления окном «человек-компьютер». Он является мозгом всей системы разработки и испытания. В нем установлены программное обеспечение аналогового моделирования, программное обеспечение разработки, программное обеспечение обработки данных и программное обеспечение связи. Их главные функции: моделирование электроцепи хардвера преобразователя, моделирование параметров системы управления преобразователя, аналоговое моделирование системы, обработка сигнала электрических параметров, обработка сигнала параметров оборотов и вращающего момента, управление преобразователем, управление аналоговой механической нагрузкой, отладка и запись программного обеспечения управления преобразователя, драйвер печатающего устройства и т.д. С помощью RS-232 в PC 10 контролируют контроллер DSP 12 в испытуемом преобразователе высокого напряжения 1. Таким образом можно управлять разработкой и испытанием программного обеспечения преобразователя с помощью PC. В PC 10 установлено согласование связи программного обеспечения. Разработчик может составить программу управления с помощью языка С или языка ассемблера. После компиляции непосредственно устанавливают программу управления в контроллере DSP и проводят цифровое управление в режиме реального времени. В PC 10 установлен пакет программ для обеспечения моделирования MATLAB/SIMULINK. При проектировании системы управления с помощью MATLAB/SIMULINK в PC 10 можно добиться, чтобы электродвигатель проводил моделирование с помощью привода преобразователя высокого напряжения, а также осуществить отладку и выбор параметров контроллера, анализ сигнала. В PC 10 установлено программное обеспечение dSPACE. Программное обеспечение dSPACE предлагает окно, в котором можно связаться с программным обеспечением моделирования MATLAB/SIMULINK. Пользователь может разработать правила управления в среде MATLAB/SIMULINK и провести аналогию системы. Потом установить разработанную программу управления в целевом процессоре и провести аналогию контура хардвера. С помощью среды окна «человек-компьютер» в PC и карты управления окном разработчик может выполнить проектирование аналоговой системы контура хардвера и на этом основании провести технико-экономические оценки системы. В PC 10 также установлено программное обеспечение виртуального инструмента. Программное обеспечение виртуального инструмента может проявлять способность компьютера. Оно имеет сильную функцию обработки данных, позволяющую производить приборы с различными сильными функциями. В соответствии с требованиями пользователь может определять и производить различные приборы. Поэтому с помощью различных наблюдательных приборов (например, осциллограф и т.д.) можно в режиме онлайн наблюдать разные варианты или параметры регулирования. Данные наблюдательные приборы выполнены с помощью программного обеспечения виртуального инструмента.
Данная система имеет функции разработки преобразователя и испытания модулей хардвера и программного обеспечения. Способ работы представлен на фиг.2. Он включает следующие шаги.
Шаг а). Сначала создают интеллектуальную систему комплексной разработки и испытания для преобразователя высокого напряжения.
Шаг б). Устанавливают программное обеспечение моделирования MATLAB/SIMULINK в PC и создают математическую модель системы регулирования скорости преобразователя высокого напряжения.
Шаг в). Определяют структуру контроллера DSP и метод проектирования, при этом по шагу б) создают математическую модель и проводят моделирование на компьютере, после чего получают первоначальные параметры контроллера DSP.
Шаг г). Подставляют первоначальные параметры и осуществляют интеграцию контроллера DSP.
Шаг д). Устанавливают программное обеспечение виртуального инструмента в PC. В среде программного обеспечения моделирования MATLAB/SIMULINK в PC проводят аналоговое испытание полуфизического моделирования. Поскольку имитационная модель не соответствует действительной прикладной среде, то нужно проверить первоначальные параметры контроллера DSP. При традиционном проектировании и разработке это сложный процесс, требующий применения многих людских и материальных ресурсов. В настоящем изобретении виртуальный инструмент и программное обеспечение моделирования MATLAB/SIMULINK образуют среду взаимной разработки и испытания, позволяющую провести онлайновую отладку в режиме реального времени. Если проектирование соответствует установленным требованиям, то можно осуществлять функции контроллера DSP.
Шаг е). В аналоговом испытании полуфизического моделирования проводят онлайновое регулирование первоначальных параметров контроллера DSP в режиме реального времени. Указанные первоначальные параметры получены при моделировании на компьютере шага в). На осциллографе виртуальной цифры виртуального инструмента наблюдают отклик системы после регулирования параметров управления.
Шаг ж). С помощью аналогового испытания полуфизического моделирования можно уменьшить диапазон параметров контроллера DSP. Предварительно определяют параметры управления контроллера DSP, которые могут удовлетворить номинальным условиям действия системы. По параметрам управления контроллера DSP, которые могут удовлетворить номинальным условиям действия системы, отдельно проводят проектирование хардвера и проектирование программного обеспечения контроллера DSP. При проектировании хардвера надо учесть свойства вычисления, цену, интерфейс, потом выбирают подходящий CPU. При проектировании программного обеспечения надо учесть дискретизацию, проектирование программы языка ассемблера, прерывание, обработку сигнала и т.д. В процессе проектирования системы управления разработчик может программировать правила управления высшим языком. После компиляции, скачивания, исполнения сразу проводят действительное испытание и регулирование. В процессе программирования, испытания и регулирования правил управления на осциллографе виртуальной цифры виртуального инструмента наблюдают все вариантности в правилах управления и проводят показ форм волны этих вариантностей в режиме реального времени.
Шаг з). После выполнения проектирования хардвера и проектирования программного обеспечения контроллера DSP отдельно устанавливают новый спроектированный хардвер и программное обеспечение в систему, потом проводят испытание интеграции системы.
При испытании интеграции системы нужно обеспечить удовлетворение номинальным условиям работы или нормальным условиям работы. Кроме того, с помощью PC изменяют параметры контроллера нагрузочного электродвигателя в аналоговой нагрузке. В системе выполняют установившееся испытание и динамическое испытание в крайнем условии и/или в предельной среде действия. Например, при проектировании программного обеспечения контроллера DSP одна дочерняя программа улучшена. Нужно проверить: (1) достигают ли свойства контроллера DSP расчетного значения после улучшения дочерней программы, (2) соответствует ли дочерняя программа после улучшения прежней программе, (3) удовлетворяют ли требованиям свойства установившегося и динамического действия контроллера в крайнем условии или в разной предельной среде действия. (Вводят разные программы управления в один элемент преобразования мощности. Например, разные программы самонастраивающегося управления и программы интеллектуального управления, позволяющие получать разные результаты управления и возможные прикладные эффекты. Потом проводят сопоставление и анализ. Программы управления, которые составили разные разработчики, или улучшенные программы записаны в контроллер DSP с помощью PC. Ищут ошибки в программе и проверяют эффекты. Таким образом можно осуществить испытание интеграции всей системы.) Если вышеуказанные 3 пункта выполнены, то такое улучшение является допустимым. В процессе проектирования и производства изделия можно провести такое улучшение. При окончательном испытании изделия перед выпуском проводят проверки. Если не удовлетворены условия вышеуказанных пунктов, то в PC указывается место несовпадения или место несоответствия дочерней программы более высокой яркостью, их удобно найти и исправить. В дочерней программе после исправления далее проводят вышеуказанные испытания, пока результаты испытания не станут приемлемыми. Таким образом можно сэкономить значительные людские и материальные ресурсы, которые могли быть потрачены на составление программы до натурного испытания в процессе традиционной разработки, повысить эффективность разработки и сэкономить время разработки. При проектировании (улучшении) хардвера контроллера DSP проводят испытание интеграции. В соответствии с действующими требованиями можно отдельно установить и проверить каждую часть системы. Данная система также годится для послепродажного обслуживания изделия или обучения разработчиков. В процессе послепродажного обслуживания с помощью данной системы отыскивают неисправности, анализируют причины неисправностей и проводят онлайновое исправление и испытание.
Шаг и). Регулирование и определение всех параметров.
Преимущества настоящего изобретения
В PC установлены программное обеспечение аналогового моделирования, программное обеспечение виртуального инструмента, программное обеспечение обработки данных и программное обеспечение связи. В полуфизической среде можно применить технику аналогового моделирования и испытать все параметры при нагрузке системы, что позволяет не только уменьшить период разработки изделия, но и повысить безопасность и надежность системы.
Основной принцип и главные особенности настоящего изобретения, а также преимущества настоящего изобретения приведены в вышеуказанном описании. Специалист в данной отрасли должен знать, что настоящее изобретение не ограничено вышеуказанным описанием. Вышеуказанное описание и прилагаемые чертежи раскрывают принцип настоящего изобретения. С учетом цели и области применения настоящего изобретения настоящее изобретение может быть изменено и улучшено. Такие изменения и улучшения находятся в сфере настоящего изобретения. Данная сфера защищена прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата | 2021 |
|
RU2771111C1 |
| АППАРАТНО-ИМИТАЦИОННЫЙ КОМПЛЕКС СИСТЕМ УПРАВЛЕНИЯ И ЭЛЕМЕНТОВ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ ДЛЯ ОТЛАДКИ СУДОВЫХ СИСТЕМ УПРАВЛЕНИЯ ОБЪЕКТОВ АРКТИЧЕСКОЙ МОРСКОЙ ТЕХНИКИ | 2017 |
|
RU2668004C1 |
| СПОСОБ РАЗРАБОТКИ И ИСПЫТАНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И МОБИЛЬНЫЙ СТЕНД ДЛЯ ТЕСТИРОВАНИЯ ЭЛЕКТРОННОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 2020 |
|
RU2755027C1 |
| Испытательный стенд для силовых преобразователей электроэнергии распределенных микроэнергосистем с альтернативными источниками энергии | 2021 |
|
RU2781673C1 |
| СПОСОБ ПРОВЕДЕНИЯ ЭЛЕКТРИЧЕСКИХ ИСПЫТАНИЙ МИКРОПРОЦЕССОРНОГО УСТРОЙСТВА РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ | 2024 |
|
RU2838834C1 |
| СПОСОБ ОЦЕНКИ ПОМЕХ В СИСТЕМАХ ЭЛЕКТРОПИТАНИЯ | 2011 |
|
RU2483410C2 |
| Способ диагностического мониторинга упругого момента шпинделя толстолистового прокатного стана | 2024 |
|
RU2830788C1 |
| Территориально-распределенный испытательный комплекс (ТРИКС) | 2018 |
|
RU2691831C1 |
| Роботизированный реабилитационный аппаратно-программный комплекс с биологической обратной связью и модулем электромиостимуляции | 2024 |
|
RU2838938C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ МНОГОПАРАМЕТРИЧЕСКИМ ОБЪЕКТОМ И ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2730387C2 |
Изобретение относится к технике электрического управления и испытаний. Предложен также способ создания интеллектуальной системы комплексной разработки и испытания для преобразователя высокого напряжения. Данная система не только уменьшает период разработки изделия, но и является вспомогательной площадкой для диагностики неисправности изделия. Предлагаемое изобретение позволяет получить технический результат - повысить надежность разработанного изделия . 1 з.п. ф-лы, 2 ил.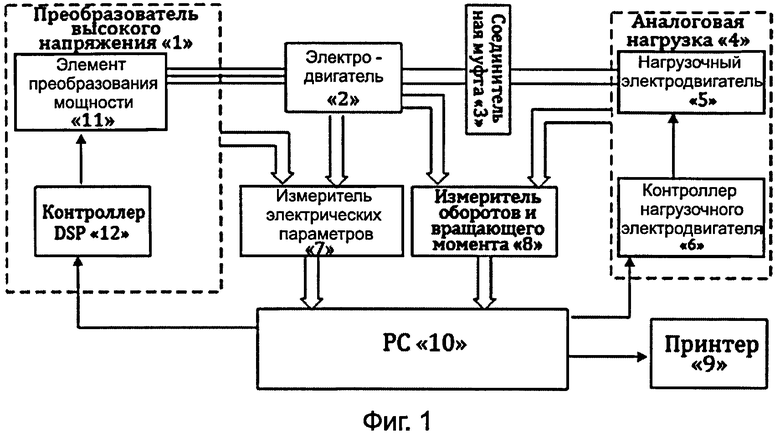
1. Способ комплексной разработки и испытания интеллектуальной системы для преобразователя высокого напряжения, включающий следующие шаги:
а) создают систему, включающую преобразователь высокого напряжения, электродвигатель, соединенный с помощью соединительной муфты с узлом аналоговой нагрузки, и персональный компьютер (PC), при этом преобразователь высокого напряжения содержит элемент преобразования мощности и контроллер процессора цифрового сигнала DSP, причем элемент преобразования мощности соединен с электродвигателем, контроллер DSP соединен с PC, выполненным с возможностью предлагать параметры сигнала управления, а узел аналоговой нагрузки содержит нагрузочный электродвигатель и контроллер нагрузочного электродвигателя, соединенный с PC, предлагающим параметры управления,
б) устанавливают программное обеспечение моделирования MATLAB/SIMULINK в персональный компьютер (PC) и создают математическую модель системы регулирования скорости преобразователя высокого напряжения,
в) определяют структуру контроллера процессора цифрового сигнала (DSP) и способ проектирования, при этом по шагу б) создают математическую модель и проводят моделирование на компьютере, после чего получают первоначальные параметры контроллера DSP,
г) подставляют первоначальные параметры и осуществляют интеграцию контроллера DSP,
д) устанавливают программное обеспечение виртуального инструмента в PC, при этом в среде программного обеспечения моделирования MATLAB/SIMULINK в PC проводят аналоговое испытание полуфизического моделирования,
е) в аналоговом испытании полуфизического моделирования проводят онлайн регулирование первоначальных параметров контроллера DSP в режиме реального времени, причем данные первоначальные параметры получают при моделировании на компьютере шага в), при этом на осциллографе виртуальной цифры виртуального инструмента наблюдают отклик системы после регулирования параметров управления,
ж) с помощью аналогового испытания полуфизического моделирования уменьшают при необходимости область параметров контроллера DSP, при этом предварительно определяют параметры управления контроллера DSP, которые могут удовлетворить номинальным условиям работы системы, после чего по параметрам управления контроллера DSP, удовлетворяющим номинальным условиям работы системы, отдельно проводят проектирование хардвера и проектирование программного обеспечения контроллера DSP,
з) после выполнения проектирования хардвера и проектирования программного обеспечения контроллера DSP отдельно ставят в систему новый спроектированный хардвер и программное обеспечение, после чего проводят испытание интеграции системы,
и) осуществляют регулирование и определение всех параметров.
2. Способ по п.1, характеризующийся тем, что на шаге з) с помощью PC изменяют параметры контроллера нагрузочного электродвигателя в аналоговой нагрузке, при этом в системе выполняют установившееся испытание и динамическое испытание в крайних условиях и/или в предельной среде действия.
| CN200993666Y,19.12.2007 | |||
| CN101975924A,16.02.2011 | |||
| Устройство с подвижным противовесом для стреловых кранов | 1950 |
|
SU89248A1 |

