Область техники, к которой относится изобретение. Изобретение относится к комплексным моделирующим устройствам, предназначенным для отработки вычислителя беспилотного летательного аппарата (БЛА) на базе полетного контроллера Pixhawk с использованием интерфейсов UART, SPI, I2C, Ethernet, PWM, RS232, CAN.
Уровень техники.
В настоящее время стенды полунатурного моделирования широко используются для проведения испытаний оборудования в контуре с математическими моделями перед проведением натурных испытаний. Отработки различных полетных ситуаций существенно снижают риски при проведении натурных испытаний, позволяя исследовать поведение системы управления и программного обеспечения различного бортового оборудования в случае внешнего повреждения, внутренних ошибок, задержек связи, неблагоприятных погодных условиях, выхода за эксплуатационные ограничения и других внештатных ситуациях. Анализ найденных патентов показывает, что в отечественной промышленности уже используются полунатурные стенды моделирования, в том числе включающие формирование виртуальных трехмерных изображений объектов окружающей обстановки с помощью системы визуализации моделирующего комплекса. В основном найденные патенты основаны на различных методах обработки информации для прогнозирования результатов натурных испытаний. Стоит отметить, что в 2014 году был зарегистрирован патент на систему прогнозирования результатов натурных испытаний [1]. Данный патент является близким аналогом заявленного изобретения.
Система по прототипу основана на стенде полунатурного моделирования для четырех роторного ЛА, в то время как объект испытаний с использованием изобретения имеет аэродинамическую схему «Тailsitter» с отличающимся набором бортового оборудования.
Система по прототипу содержит компьютер эмуляции, бортовой микроконтроллер, беспроводной приемопередатчик №1, беспроводной приемопередатчик №2 и бортовой датчик.
Для достижения полуфизического моделирования используется система моделирования dSPACE, которая является платформой для разработки и тестирования системы управления MATLAB/Simulink.
Недостатком известного устройства является низкая достоверность реакции вычислителя БЛА при его отработке из-за отсутствия имитаторов бортового оборудования, подключенных по физическим интерфейсам к бортовому микроконтроллеру (имитатор акселерометра, имитатор гироскопа, имитатор GPS-датчика, имитатор магнитометра, имитатор датчика высоты, имитатор скорости).
В России в 2018 году на ежегодной конференции «Технологии разработки и отладки сложных технических систем» был впервые представлен комплекс полунатурного моделирования «РИТМ», оснащенный российскими платами ввода или вывода, операционной системой Simulink Real-time и базирующийся на комплексе полунатурного моделирования швейцарского производителя Speedgoat [2].
Представленный стенд был применен для полунатурного моделирования авиадвигателя, однако может быть использован и для моделирования других физических систем.
Одним из наиболее известных производителей стендов полунатурного моделирования является швейцарская компания Speedgoat, основанная в 2007 году. Машины реального времени Speedgoat предоставляют удобные и мощные решения для запуска сложных физических моделей и моделирования объекта управления в реальном времени.
Однако для проведения полунатурных испытаний, помимо специализированного вычислителя оснащенного платами ввода или вывода, который является продуктом компаний Speedgoat и «РИТМ», необходим специально разработанный набор математических моделей и имитаторов бортового оборудования, которые обеспечивают объект испытаний необходимой информацией.
Раскрытие сущности изобретения.
Техническая проблема заключается решении недостатков наиболее близкого аналога благодаря повышению надежности и расширению функциональных возможностей аппаратно-программной платформы стенда полунатурного моделирования.
Технические результаты заключается в:
- обеспечение возможности отработки вычислителя БЛА во внештатных условиях, благодаря возможности отключения одного или нескольких имитаторов бортового оборудования во время выполнения моделирования;
- повышение достоверности реакции вычислителя БЛА при его отработке по сравнению с математическим моделированием вычислителя БЛА за счет использования для подключения вычислителя БЛА физических интерфейсов, аналогичных физическим интерфейсам по которым к вычислителю БЛА подсоединено бортовое оборудование. Указанный подход позволяет с высокой точностью смоделировать задержки и помехи, возникающие в контуре связи.
Указанные технические результаты достигаются в аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата (БЛА) состоящая из рабочего места оператора, кабельной сети, системы электроснабжения и вычислительного комплекса, содержащего модель динамики, модель приводов и имитаторы акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости функционирующих в операционной системе реального времени. Дополнительно содержит вычислитель БЛА соединенный посредством интерфейсов с вычислительным комплексом,
при этом рабочее место оператора выполнено с возможностью подачи на вход вычислительного комплекса управляющих сигналов, содержащих параметры настройки для модели динамики, имитаторов акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, а также модели приводов, модель динамики выполнена с возможностью передачи информационных сигналов на имитаторы акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, выходные данные которых, поступая в вычислительный комплекс кодируются и формируются в сообщения, где на первый вход вычислителя БЛА передаются по интерфейсу выходные данные от имитаторов акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты, а на второй вход вычислителя БЛА – данные от имитатора датчика скорости при этом вычислитель БЛА в соответствии с полученными данными осуществляет стабилизацию руля направления, руля управления, руля отклонения элеронов и тяги, и передает управляющие сигналы на модель приводов, откуда значения углов отклонения руля направления, руля управления, руля отклонения элеронов и тяги поступают в модель динамики.
Вычислитель БЛА выполнен на базе полетного контроллера Pixhawk.
Интерфейсы представляют собой интерфейсы UART, I2C для передачи информационных сигналов и интерфейсы Ethernet и Pwm для передачи управляющих сигналов на модель приводов.
Аппаратно-программная платформа дополнительно содержит интерфейсы SPI, RS232, CAN для возможности подключения к вычислителю БЛА бортового оборудования.
Информационные сигналы содержат расчет значений угловых скоростей, ориентации БЛА, географических координат БЛА, значений напряженности магнитного поля в точке местонахождения БЛА, высоты БЛА, значения температуры, разницы давления в приемнике давления датчика и скорости БЛА.
Модели, как и имитаторы бортового оборудования представляют собой модели, разработанные в среде модельно-ориентированного проектирования. Основное отличие между «моделями» и «имитаторами» заключается в том, что «имитаторы» обеспечивают информационный обмен между вычислительным комплексом и вычислителем БЛА с использованием специализированных плат ввода/вывода, в то время как «модели» никак не взаимодействуют с аппаратной частью БЛА.
Краткое описание чертежей
Сущность предлагаемого изобретения поясняется дальнейшим описанием и чертежом, на котором представлена:
фиг. 1 - структурная схема изобретения, где:
1 - рабочее место оператора;
2 - вычислительный комплекс;
3 - модель динамики БЛА;
4 - модель приводов БЛА;
5 - имитатор акселерометра;
6 - имитатор гироскопа;
7 - имитатор GPS-датчика;
8 - имитатор магнитометра;
9 - имитатор датчика высоты;
10 - имитатор скорости;
11 - вычислитель БЛА.
Аппаратно-программная платформа стенда полунатурного моделирования (АПП СПНМ), состоит из:
- рабочего места оператора - настройка параметров моделирования, моделей, запуск, остановка моделирования,
- вычислительного комплекса - персональный компьютер с ОС реального времени и набором плат ввода/вывода для использования специализированных интерфейсов (UART, I2C, Pwm, SPI, RS232, CAN),
кабельной сети - интерфейсы + Ethernet для подключения рабочего места оператора к вычислительному комплексу,
системы электроснабжения - для обеспечения питанием объекта испытаний, рабочего места оператора и системы электроснабжения.
Дополнительно к АПП СПНМ подключается вычислитель БЛА для его отработки.
Рабочее 1 место предназначено для настройки параметров имитаторов и модели динамики и приводов. Вычислительный 2 комплекс содержит в себе программное обеспечение, обеспечивающее функционирование модели 3 динамики, предназначенной для вычисления аэродинамических и траекторных параметров БЛА, модели 4 приводов, имитатора 5 акселерометра, имитатора 6 гироскопа, имитатора 7 GPS- датчика,
имитатора 8 магнитометра, имитатора 9 датчика высоты, имитатора 10 датчика скорости. Через выход 1 модели 3 динамики передаются вычисленные значения угловых скоростей ах, ау, az во вход 1 имитатора 5 акселерометра.
Через выход 2 модели 3 динамики передаются вычисленные значения ориентации БЛА в виде углов Эйлера ф, у, в во вход 1 имитатора 6 гироскопа.
Через выход 3 модели 3 динамики передаются вычисленные значения географических координат БЛА в виде углов Эйлера lat, Ion, h во вход 1 имитатора 7 GPS-датчика.
Через выход 4 модели 3 динамики передаются вычисленные значения характеристик магнитного поля в виде значений напряженности магнитного поля Мх, Му, М2 во вход 1 имитатора 8 магнитометра.
Через выход 5 модели 3 динамики передается вычисленное значение высоты БЛА h во вход 1 имитатора 9 датчика высоты.
Через выход 6 модели 3 динамики передаются вычисленные значения температуры, разницы давления в приемнике давления датчика и скорости БЛА t, Р, V во вход 1 имитатора 10 датчика скорости.
Через выход 1 модели 4 приводов передаются значения углов отклонения руля направления, руля управления, руля отклонения элеронов и тяги в модель 3 динамики.
Вычислительный комплекс осуществляет кодирование данных от имитатора 5 акселерометра, имитатора 6 гироскопа, имитатора 7 GPS-датчика, имитатора 8 магнитометра и имитатора 9 датчика высоты согласно протоколу обмена вычислителя 11 БЛА и обеспечивает передачу закодированных данных в вход 1 вычислителя 11 БЛА через интерфейс UART [3]. Вычислительный комплекс осуществляет кодирование данных от имитатора 10 датчика скорости согласно протоколу обмена вычислителя 11 БЛА и обеспечивает передачу закодированных данных в вход 2 вычислителя 11 БЛА через интерфейс SP1 [3]. Вычислитель 11 БЛА осуществляет стабилизацию руля направления, руля управления, руля отклонения элеронов и тяги и передает команды в виде PWM- сигналов на модель 4 приводов.
Имитаторы 5 акселерометра, имитатора 6 гироскопа, имитатора 7 GPS-датчика, имитатора 8 магнитометра и имитатора 9 датчика высоты обеспечивают прием данных от модели 3 динамики, приведение полетных параметров к размерностям согласно структуре сообщений MAVLink#115 [4], которые используются в вычислителе БЛА для приема сообщений по интерфейсу UART, упаковку полетных параметров в структуру данных по типу структуры сообщений MAVLink#115 [4] и сериализацию сообщения (расчет заголовка и хеш-суммы) перед отправкой.
Имитатор 10 датчика скорости, разработан на основе датчика воздушной скорости MS452500 [5]. Для рассматриваемого датчика воздушной скорости по команде-запросу от полетного контроллера высылается команда-квитанция, содержащая закодированные значения местной температуры и разницы давления в приемнике давления датчика. Имитатор 10 датчика скорости обеспечивает прием данных от модели 3 динамики, пересчет параметров полета в параметры, соответствующие выходным данным конкретного компонента комплекса бортового оборудования, кодировку параметров согласно протоколу информационного обмена датчика воздушной скорости, MS452500 и перевод сообщения в байтовую строку.
Модель приводов обеспечивает прием PWM-сигналов управления от вычислителя 11 БЛА для каждого органа управления и для силовой установки и пересчет коэффициента заполнения к шкале [-1; 1] для органов управления и к шкале [0; 0,7] для силовой установки. Данные ограничения обусловлены особенностями модели динамики БЛА.
Вычислитель БЛА – представляет собой полетный контроллер Pixhawk с модифицированной прошивкой Arduplane для обеспечения работы в режиме HIL.
Вычислитель БЛА в АПП СПНМ является объектом для испытания. Именно в вычислитель устанавливаются различные версии программных прошивок, алгоритмов и т.п. Одна из основных функций АПП СПНМ заключается в том, чтобы дать пользователю возможность проверять свои программные прошивки (программное обеспечение) вычислителя, алгоритмы и т.п. (Например: корректно ли будет функционировать система управления, если в вычислитель БЛА не будет поступать информация от имитатора датчика воздушной скорости, что позволяет проверить как поведет себя реальный БЛА если датчик воздушной скорости выйдет из строя в процессе полета), что в конечном итоге и обеспечивает возможность отработки во внештатных условиях вычислителя БЛА, по результатам отработки делаются выводы о корректности или некорректности функционирования программного обеспечения установленного на такой вычислитель.
На реальном БЛА к вычислителю подключено реальное бортовое оборудование (акселерометр, гироскоп и тп). Чтобы смоделировать возможные задержки линий связи и помехи, передаются данные от имитатора (модель Симулинк, размещенная на АПП СПНМ, осуществляет кодировку данных в соответствии с требованиями протокола передачи данных и интерфейса, по которому эти данные будут передаваться) по такому же интерфейсу.
В связи с точным воспроизведением интерфейсов, используемых в реальных условиях, можно говорить о точном воспроизведении задержек в заявленном изобретении, как на реальном БЛА. При математическом моделировании (в устройствах, известных из уровня техники) данные передаются между программами в рамках одного компьютера/кластера (или нескольких подключенным Etehernet кабелем), что не позволяет нам с точностью учесть возможные задержки.
Осуществление изобретения.
Предлагаемый моделирующий комплекс работает следующим образом.
Вначале происходит подсоединение вычислителя 11 БЛА к вычислительному 2 комплексу. Затем с рабочего 1 места операторов происходит настройка параметров модели 3 динамики, модели 4 приводов, имитатора 5 акселерометра, имитатора 6 гироскопа, имитатора 7 GPS-датчика, имитатора 8 магнитометра, имитатора 9 датчика высоты, имитатора 10 датчика скорости и настройка начальных параметров моделирования: задание начальных параметров движения БЛА, контрольных точек маршрута, начального положения ручек управления.
После запуска моделирования на рабочем 1 месте оператора происходит загрузка программного обеспечения на вычислительный 2 комплекс и его запуск в операционной системе реального времени. Вычислительный 2 комплекс выполняет цикл операций. Вначале происходит прием управляющих сигналов для каждого органа управления и для силовой установки и их нормировка.
Модель 4 приводов передает нормированные значения отклонений органов управления и мощности силовой установки в модель 3 динамики, которая производит расчет значений угловых скоростей, ориентации БЛА, географических координат БЛА, значений напряженности магнитного поля в точке местонахождения БЛА, высоты БЛА, значения температуры, разницы давления в приемнике давления датчика и скорости БЛА и их передачу на имитатор 5 акселерометра, имитатор 6 гироскопа, имитатор 7 GPS-датчика, имитатор 8 магнитометра, имитатор 9 датчика высоты, имитатор 10 датчика скорости.
Значения, закодированные имитатором 5 акселерометра, имитатором 6 гироскопа, имитатором 7 GPS-датчика, имитатором 8 магнитометра и имитатором 9 датчика высоты, компонуются в вычислительном комплексе в сообщение типа MAVLink#115 и передаются по интерфейсу UART.
Значения, закодированные имитатором 10 датчика скорости, компонуются в вычислительном комплексе согласно протоколу обмена датчика воздушной скорости, MS452500 и передаются по интерфейсу I2C.
Процесс полунатурного моделирования будет продолжаться до тех пор, пока не будет остановлен на рабочем 1 месте оператора, путем передачи специальных управляющих сигналов на вычислительный комплекс, либо путем выключения вычислительного 2 комплекса. В результате проведенного моделирования на мониторе рабочего 1 места оператора будут отображены графики изменения значений величин, выбранных оператором перед запуском моделирования, от времени. Также в процессе моделирования на мониторе вычислительного 2 комплекса отображается текущее значение величин, выбранных оператором перед запуском моделирования. Полученные значения также могут быть сохранены в файл для последующего анализа.
Предлагаемая аппаратно-программная платформа стенда полунатурного моделирования сочетает основные достоинства натурных испытаний и математического моделирования и одновременно избавлена от присущих им недостатков.
Промышленная применимость устройства определяется тем, что на основании приведенного описания предлагаемая система может быть изготовлена при использовании различных аппаратных составляющих, совместимых со средой модельно ориентированного проектирования и в дальнейшем может быть модифицирована для взаимодействия с вычислителем БЛА, выполненном на базе полетного контроллера отличного от Pixhawk.
Список литературы
1. Патент CN №104133379A Simulation method for four-rotor aircraft 05.11.2014 г.]
2. Итоги VI научно-практической конференции «Технологии разработки и отладки сложных технических систем-2019, Электронный ресурс, https://controleng.ru/rvnok/itogi-otladki-sistem-2019/
3. PixhawkSensors, Электронный ресурс, https://docs.px4.io/master/en/getting_started/sensor_selection.html#wiring
4. MAVLINK Common Message Set, Электронный ресурс, https://mavlink.io/en/messages/common.html
5. Pixhawk Airspeed Sensors, Электронный ресурс, https://docs.px4.io/master/en/sensor/airspeed.html
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МАЛОРАЗМЕРНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2820041C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| СИСТЕМА ОБРАБОТКИ И АНАЛИЗА ПОЛЁТНОЙ ИНФОРМАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ И УПРАВЛЕНИЯ ЛЁТНЫМ ЭКСПЕРИМЕНТОМ | 2013 |
|
RU2562409C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| СПОСОБ НАЗЕМНОЙ ИМИТАЦИИ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ В КОСМОСЕ | 2012 |
|
RU2527632C2 |
| Система аэромониторинга залежек морских животных | 2015 |
|
RU2609728C1 |

Аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата (БЛА) содержит рабочее место оператора, кабельную сеть, системы электроснабжения, вычислительный комплекс. Вычислительный комплекс содержит вычислитель БЛА, соединенный посредством интерфейсов с вычислительным комплексом, и включает модель динамики, модель приводов, имитаторы: акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, функционирующих в операционной системе реального времени. Обеспечивается повышение достоверности реакции вычислителя БЛА при его отработке, повышение точности моделирования задержек и помех, возникающих в контуре связи, возможность отработки вычислителя во внештатных условиях. 4 з.п. ф-лы, 1 ил.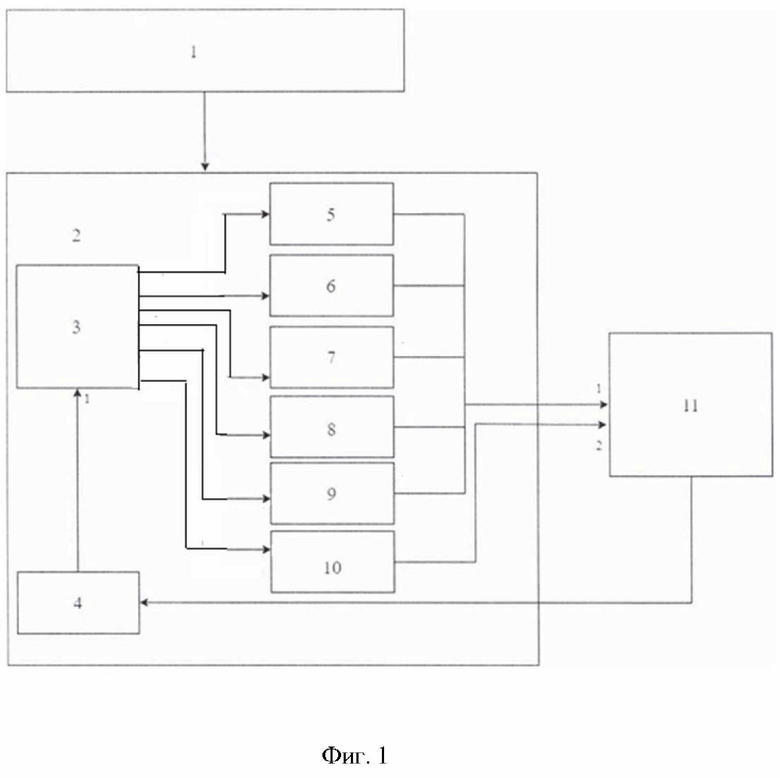
1. Аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата (БЛА), состоящая из рабочего места оператора, кабельной сети, системы электроснабжения и вычислительного комплекса, содержащего модель динамики, модель приводов и имитаторы акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, функционирующих в операционной системе реального времени, отличающаяся тем, что дополнительно содержит вычислитель БЛА, соединенный посредством интерфейсов с вычислительным комплексом,
при этом рабочее место оператора выполнено с возможностью подачи на вход вычислительного комплекса управляющих сигналов, содержащих параметры настройки для модели динамики, имитаторов акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, а также модели приводов,
при этом модель динамики выполнена с возможностью передачи информационных сигналов на имитаторы акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты и датчика скорости, выходные данные которых, поступая в вычислительный комплекс, кодируются и формируются в сообщения, где на первый вход вычислителя БЛА передаются по интерфейсу выходные данные от имитаторов акселерометра, гироскопа, GPS-датчика, магнитометра, датчика высоты, а на второй вход вычислителя БЛА – данные от имитатора датчика скорости,
при этом вычислитель БЛА в соответствии с полученными данными осуществляет стабилизацию руля направления, руля управления, руля отклонения элеронов и тяги и передает управляющие сигналы на модель приводов, откуда значения углов отклонения руля направления, руля управления, руля отклонения элеронов и тяги поступают в модель динамики.
2. Аппаратно-программная платформа по п.1, отличающаяся тем, что вычислитель БЛА выполнен на базе полетного контроллера Pixhawk.
3. Аппаратно-программная платформа по п.1, отличающаяся тем, что интерфейсы представляют собой интерфейсы UART, I2C для передачи информационных сигналов и интерфейсы Ethernet и Pwm для передачи управляющих сигналов на модель приводов.
4. Аппаратно-программная платформа по п.1, отличающаяся тем, что дополнительно содержит интерфейсы SPI, RS232, CAN для возможности подключения к вычислителю БЛА бортового оборудования.
5. Аппаратно-программная платформа по п.1, отличающаяся тем, что информационные сигналы содержат расчет значений угловых скоростей, ориентации БЛА, географических координат БЛА, значений напряженности магнитного поля в точке местонахождения БЛА, высоты БЛА, значения температуры, разницы давления в приемнике давления датчика и скорости БЛА.
| Гоголев А.А | |||
| Полунатурное моделирование беспилотных летательных аппаратов типа мультикоптер Труды МАИ | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| УСТРОЙСТВО ОПТИМИЗАЦИИ АЛГОРИТМОВ АДАПТАЦИИ И СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОПЕРАТОРНЫМ МЕТОДОМ | 2015 |
|
RU2620280C1 |
| Электрический жидкостный реостат | 1928 |
|
SU15046A1 |
| KR 1020100100453 A, 15.09.2010. | |||

