Изобретение относится к области использования спутниковых навигационных систем (СНС). Известно устройство приема сигналов СНС на антенну, находящуюся над водой. Устройство заключается в том, что для производства обсервации подводный объект (ПО) вынужден всплывать в надводное положение, когда антенна судовой спутниковой навигационной аппаратуры (СНА) находится над водой, или использовать выдвижные антенные устройства (ВУ) при нахождении ПО в перископном положении. Недостатком таких устройств является невозможность приема радиосигналов СНА, а следовательно, и производство обсервации ПО в любой момент времени в условиях подледного плавания.
Ближайшим аналогом антенны для подледного приема спутниковых радиосигналов является устройство с термобуром (Катенин В.А. Способ подледного приема сигналов спутниковых навигационных систем. Патент №2119703, 1998 г.).
Для осуществления приема радиосигналов СНС в этом случае необходимо произвести:
1. Поиск с помощью эхоледомера (9) и телевизионных средств (11) места, пригодного для приледнения.
2. Приледнение к нижней кромке ледового покрова (3) без хода и с дифферентом (3-5°) на корму.
3. «Припечатывание» рубки ПО (8) к нижней кромке ледового покрова (3) путем создания положительной плавучести ПО для избежания его горизонтальных перемещений.
4. Выравнивание корпуса ПО (8) за счет отвода дифферента.
5. Подъем ВУ (6) и создание полости (4) необходимых размеров с подачей воздуха высокого давления (ВВД) для удаления морской воды (осушение полости).
6. Прием радиосигналов (2) от космических аппаратов (1) через лед на «сухую» антенну (5) и определение своего местоположения.
7. Возврат ВУ (6) с антенной в исходное положение.
8. Погружение подводного объекта (8) на заданную глубину и продолжение выполнения поставленной задачи.
В патенте №2119703 был рассмотрен способ приема радиосигналов низкоорбитных спутниковых навигационных систем в диапазоне 150 и 400 МГц, проникающих сквозь ледовый покров на основе термобура.
В настоящее время в эксплуатации находятся среднеорбитные СНС, работающие в диапазоне 1176,45-1615,5 МГц и сигналы которых сквозь морской лед не проникают. Это вынуждает на ПО для производства обсервации осуществлять сквозное плавление ледового покрова с выходом антенного устройства наружу. При этом высота антенного устройства в заявленном способе не регулировалась, что может негативно сказываться на вероятности его обнаружения и выхода его из строя за счет перегорания нагревателя на открытом воздухе.
Целью изобретения является расширение функциональных возможностей известного антенного устройства подводного объекта, предназначенного для плавления ледяного покрова снизу и создания благоприятных условий приема радиосигналов спутниковых навигационных систем второго поколения GPS и ГЛОНАСС.
Эта цель достигается за счет использования специальных антенных устройств, а также тем, что в известную схему антенного устройства добавляется вычислительный блок для автоматического определения высоты подъема выдвижного устройства, выбора оптимального режима подачи теплоносителя (пара или мощности электрического тока) и его регулирования в зависимости от заданного режима паробурения (термобурения) ледяного покрова снизу.
Для реализации предлагаемого устройства производят:
1. Поиск с помощью эхоледомера (9) и телевизионных средств (11) места, пригодного для приледнения.
2. Приледнение к нижней кромке ледового покрова (3) без хода и с дифферентом (3-5°) на корму.
3. «Припечатывание» рубки ПО (8) к нижней кромке ледового покрова (3) путем создания положительной плавучести ПО (8) для избежания его горизонтальных перемещений.
4. Выравнивание корпуса ПО (8) за счет отвода дифферента.
5. Подъем ВУ (6) и сквозное плавление льда до тех пор, пока головка антенного устройства не окажется над поверхностью ледового покрова (3) на минимальной высоте, обеспечивающей уверенный прием радиосигналов (2), что обеспечивается дополнительным вычислительным блоком.
6. Прием радиосигналов (2) от космических аппаратов (1) через лед (3) на «сухую» антенну (5) и определение своего местоположения.
7. Возврат ВУ (6) с антенной (5) в исходное положение.
8. Погружение подводного объекта (8) на заданную глубину и продолжение выполнения поставленной задачи.
На фиг.1 изображена принципиальная схема приема радиосигналов СНС, где:
1. - Космические аппараты (спутники).
2. - Радиосигналы.
3. - Ледовый покров.
4. - Сквозное проплавленное отверстие.
5. - Антенное устройство (антенна).
6. - Выдвижное устройство.
7. - Электромотор с редуктором.
8. - Подводный объект.
9. - Эхоледомер.
10. - Глубиномер.
11. - Телевизионная камера.
В качестве антенных устройств подледного приема спутниковых радиосигналов представляется возможным использовать три их варианта: паровоздушное, с механическим буром, с электротермобуром.
Паровоздушное антенное устройство
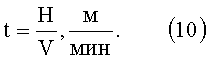
На фиг.2 изображено паровоздушное антенное устройство (5). Паровоздушное антенное устройство (5) представляет собой кольцевой трубопровод - перфорированный тор с внешним диаметром до 150 мм и крепится в верхней части ВУ (6). По периметру трубопровода расположены смесительные сопла-форсунки (14) для направленного выхода пара и подачи ВВД диаметром 3 мм. ВУ (6) представляет собой полую трубу, внутри которой проходят паропровод (12) и трубопровод с ВВД (13). Пар и ВВД через форсунки (14) подаются к ледовому покрову (3). ВВД служит для осушки полости, образующейся при плавлении льда паровоздушным антенным устройством. Для определения высоты подъема ВУ (6) при плавлении ледяного покрова (3) в верхней части паровоздушного антенного устройства (5) крепится датчик (15) контакта ВУ (6) со льдом.
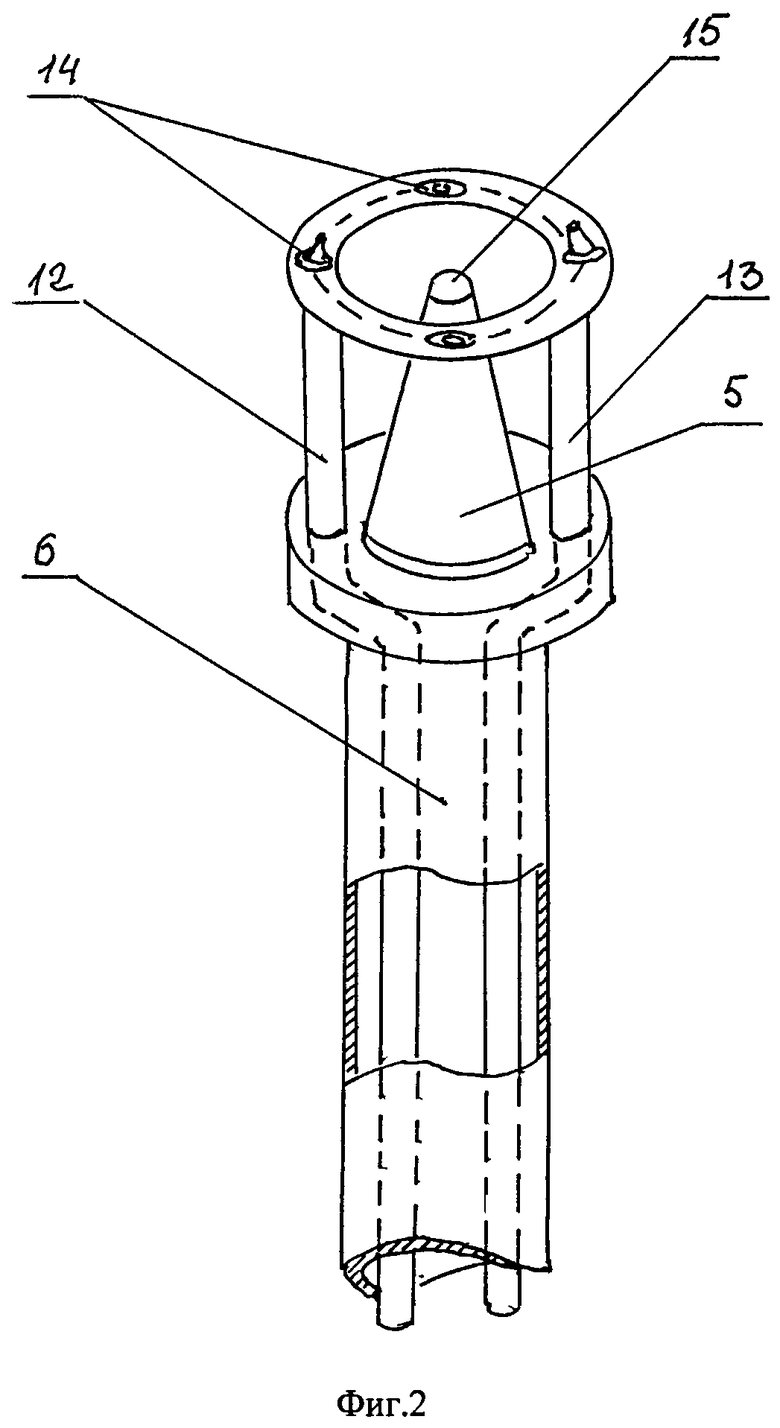
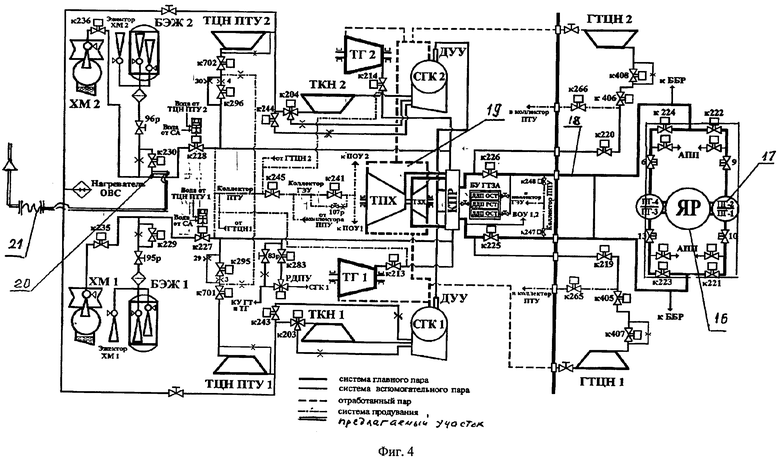
На фиг.3 изображена принципиальная схема выработки и подачи перегретого пара на выдвижное устройство (6) для плавления льда. На ПО (8) с атомной энергетической установкой (АЭУ) (16) пар генерируется в типовой паропроизводительной установке (ППУ) (17) и далее по главному паропроводу (18) подается к паротурбинной установке (ПТУ) (19), обеспечивающей движение ПО (8).
Пар к ВУ (6) подается по специальному вспомогательному трубопроводу (20) через арматуру подачи пара в смесительные форсунки (14).
Соединение трубопроводов (12) и (20) осуществляется гибким металлическим патрубком (21) для обеспечения поступательного движения на величину подъема ВУ (6).
Процесс плавления льда паром происходит следующим образом. С помощью эхоледомера (9), глубиномера (10) и телевизионных средств (11), позволяющих определить толщину ледового покрова и неровности нижней кромки льда, производят подбор места приледнения ПО (8). Подводный объект (8) всплывает и упирается верхним срезом ограждения рубки в ледяной покров (3). Поднимается ВУ (6) с паровоздушным антенным устройством (5) до контакта с ледяной поверхностью (3).
Датчик (15) фиксируют подъем ВУ (6) на первоначальную высоту. Подается перегретый пар и начинается процесс плавления льда с одновременным плавным подъемом ВУ (6). Зная размеры паровоздушного антенного устройства и высоту подъема ВУ (6) в процессе плавления, представляется возможным с помощью специального вычислительного блока (23) рассчитать расплавленную массу льда и объем образовавшейся полости (4), в которую для вытеснения морской воды подается ВВД из баллона (22).
Более подробная схема систем главного и вспомогательного пара представлена на фиг.4.
Работоспособность системы основывается на законах преобразования тепловой энергии в кинетическую энергию струи пара из сопел (14) и далее в теплоту плавления льда до появления сквозного отверстия для ВУ (6).
В общем случае система уравнений имеет вид (см. формулы 1-8).
1) Уравнение сохранения энергии (1) и теплового баланса для одного килограмма пара(1А) для адиабатического процесса:
где h0 - начальная энтальпия пара кДж/кГ;
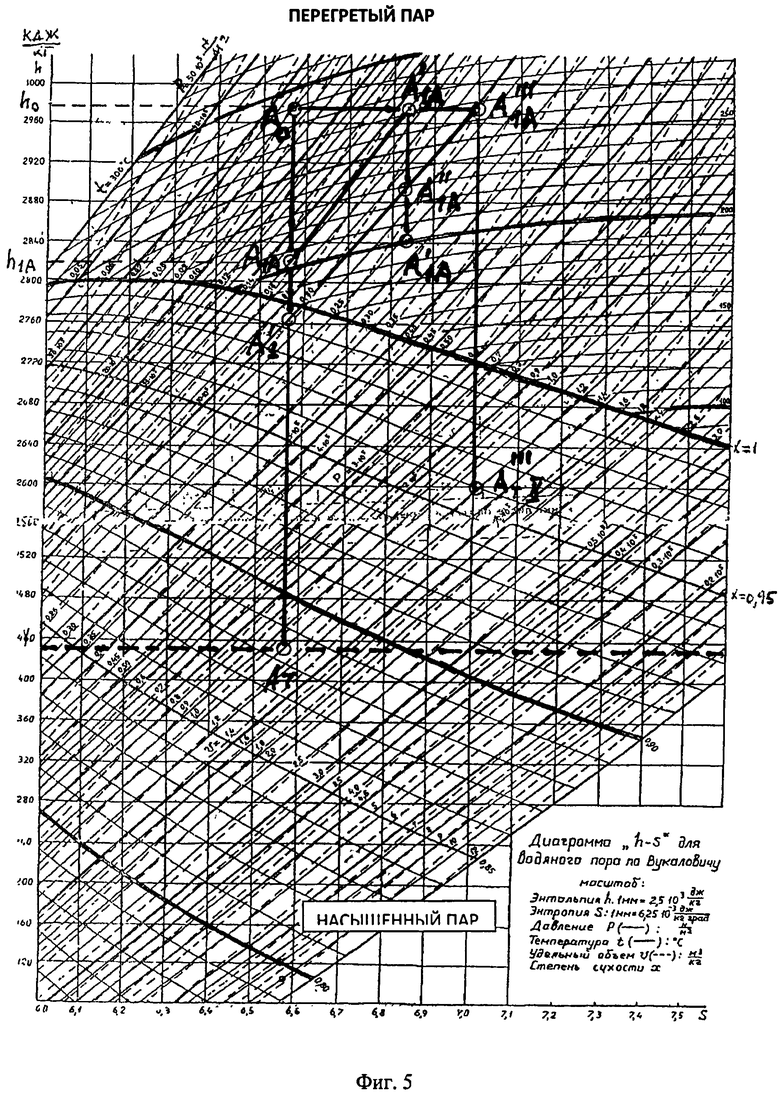
h10 - энтальпия пара, кДж/кГ. Снимается с диаграммы h-S, изображенной на фиг.5 [Вуколович М.П., Новиков И.И. Техническая термодинамика. - М: Энергоиздат, 1952. - 298 с.].
С10 - скорость пара в сечении 1-0, м/с;
С1А - скорость пара в сечении 1 А, м/с.
2) Кинетическая энергия струи пара на выходе из сопел:
3) Местная скорость звука (а):

где 
ρ0 - начальное давление на выходе из сопел для параметров атомной энергетической установки (ρ0≈2,5 мПа; t0≈250°С);
t0 - начальная температура;
ν0 - удельный объем (м3/кГ) при начальных параметрах.
4) Суммарное количество тепла для расплавления льда (кДж):

где Q1 - количество тепла, необходимое для доведения массы льда до температуры плавления льда (100°С), кДж;
Q2 - количество тепла, необходимое для расплавления массы льда (Gл, кГ).
Q1=CpΔt;
Q2=λGл, кДж;
λ=3,4×103, кДж/кГ - теплота плавления льда.
5) Масса льда
Здесь 
d=0,15 м - диаметр головки выдвижного паровоздушного устройства;

6) Тепловая мощность

Здесь ηу - эффективность устройства, равная 0,6 (кВт);
mп - масса пара, кГ.
h10 - эпитальгия пара (кА/кГ) снимается с диаграммы h-S (фиг.5).
7) Масса пара mn, кГ
где Fc - сечение сопел, м2;
С1А - скорость пара в сечении 1А;
ν1A - удельный объем в сечении 1А, снимается с диаграммы h-S на фиг.5.
8) Начальная энергия (энтальпия) пара h10=f(p0,t0). Зависит от параметров пара в парапроводе (точка А0 на диаграмме состояния h-S.
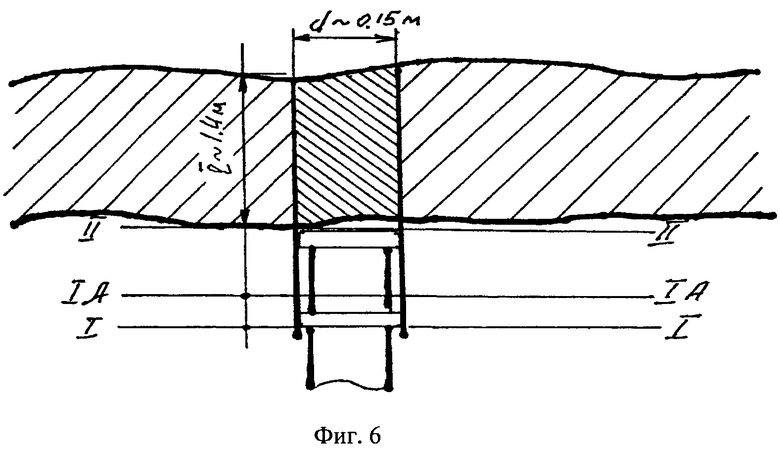
Расчетная схема паровоздушного антенного устройства приведена на фиг.6. Здесь показаны характерные сечения для парового потока:
сечение 1-1 выходное сечение сопла, когда начальная скорость пара от С0=0 увеличивается до скорости C1A;
сечение 1А-1А - сечение максимальной скорости

h10 - начальная энтальпия (кДж/кГ), как функция начальных
параметров пара перед соплами (р0 - начальное давление, Н/м2; t0 - начальная температура, °С, снимаем с диаграммы h-S состояния пара на фиг.5;
h1A - конечная энтальпия пара (насыщенный пар при смешении с водой в зависимости от глубины погружения (всплытия); сечение П-П - конечное сечение.
FП - var - сечение поверхности льда, переменное по мере размыва и расплавления. Снимаем с диаграммы h-S состояния пара на фиг.5.
Пример
1. Для начальных параметров пара р0=26×105 Н/м2; t0=280°С, т.е. когда пар находится в паропроводе при всплытии, снимаем в точке А0 начала истечения пара
h0=2970 кДж/кГ.
2. Точка A1A(A'1A) - конечная точка расширения пара (сохраняется форма струй). В ней
h1A=2820 кДж/кГ.
Тогда адиабатный период На при расширении пара будет
На=h0-h1A=2970-2820=150 кДж/кГ.
3. Скорость пара в сечении A1A (теоретическая) будет определяться выражением

4. Дросселирование и смешение пара с водой идет ступенчато до давления забортной воды (на глубине ~1,4 м), равного 
процесс от т.
процесс от т.
процесс от т.
процесс от т.
Точка 
Процесс завершается образованием сквозного отверстия во льду с возможным выбросом в атмосферу пароводяной смеси.
5. Масса льда, которая подлежит плавлению, находится по формуле

6. Общее количество тепла, необходимое для расплавления льда, массой Gл, будет
Q2=λGл=3,14×103×30=102000 кДж.
7. Тепловая мощность 



8. Время плавления (tпл) массы льда при заданных гидрологических параметрах Gk=30 кГ
9. Суммарный расход пара для работа паровоздушного антенного устройства
Gп=mпtпл=6,8×79=537,2 кГ
Такой расход пара соответствует реальным условиям восполнения расхода пара (воды) в термодинамическом цикле ПТУ.
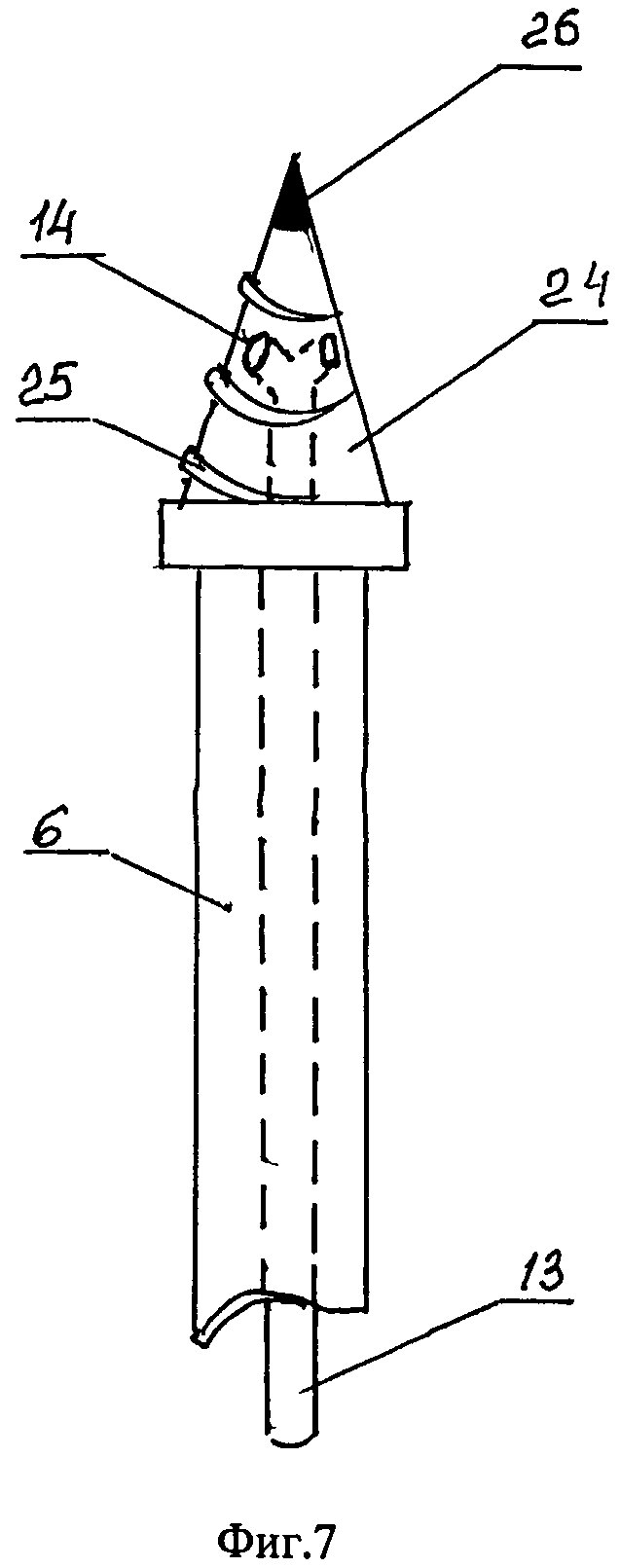
Антенное устройство с механическим буром
Антенна СНА помещается в обтекателе конической формы (фиг.7), который выполнен в виде головки бура (24) с режущими кромками (25), установленной на штатном ВУ (6), представляющем собой полую трубу, внутри которой проложен трубопровод ВВД (13). ВУ может перемещаться в вертикальной плоскости и вращаться вокруг оси от электромотора (7) с помощью редуктора.
Для приема спутниковых сигналов ПО (8) приледняется рубкой, чтобы исключить горизонтальные перемещения корпуса, создается небольшая положительная плавучесть, которая «припечатывает» ПО к нижней кромке ледового покрова (3). Поднимается ВУ (6) и начинается бурение сквозного отверстия (4). Для удаления морской воды и ледяной стружки в отверстие подается ВВД. Для получения информации о пройденном расстоянии при бурении льда снизу на головке механического бура имеется датчик контакта его со льдом (26), выполняющего ту же роль, что и в случае с паровоздушным антенным устройством. Процесс продолжается до тех пор, пока поверхность антенны (обтекатель (24) не окажется надо льдом. После чего подача ВВД прекращается. Спутниковые сигналы (2) принимаются на «сухую» антенну СНА и происходит сеанс обсервации.
Производительность механического вращательного бурения (глубина погружения сверла за минуту непрерывного бурения) зависит от твердости льда, частоты вращения бура, осевой нагрузки, типа режущего инструмента и состояния его поверхности.
Скорость резания льда может быть определена по формуле [Богородский В.В., Гаврило В.П., Недовишин О.А. Разрушение льда. Методы, технические средства. - Л.: Гидрометеоиздат, 1983. - 232 с.]
где V - скорость бурения льда, м/мин;
D - диаметр бура, м;
n - частота вращения бура, об/мин.
Время бурения льда, заданного объема, можно оценить по формуле
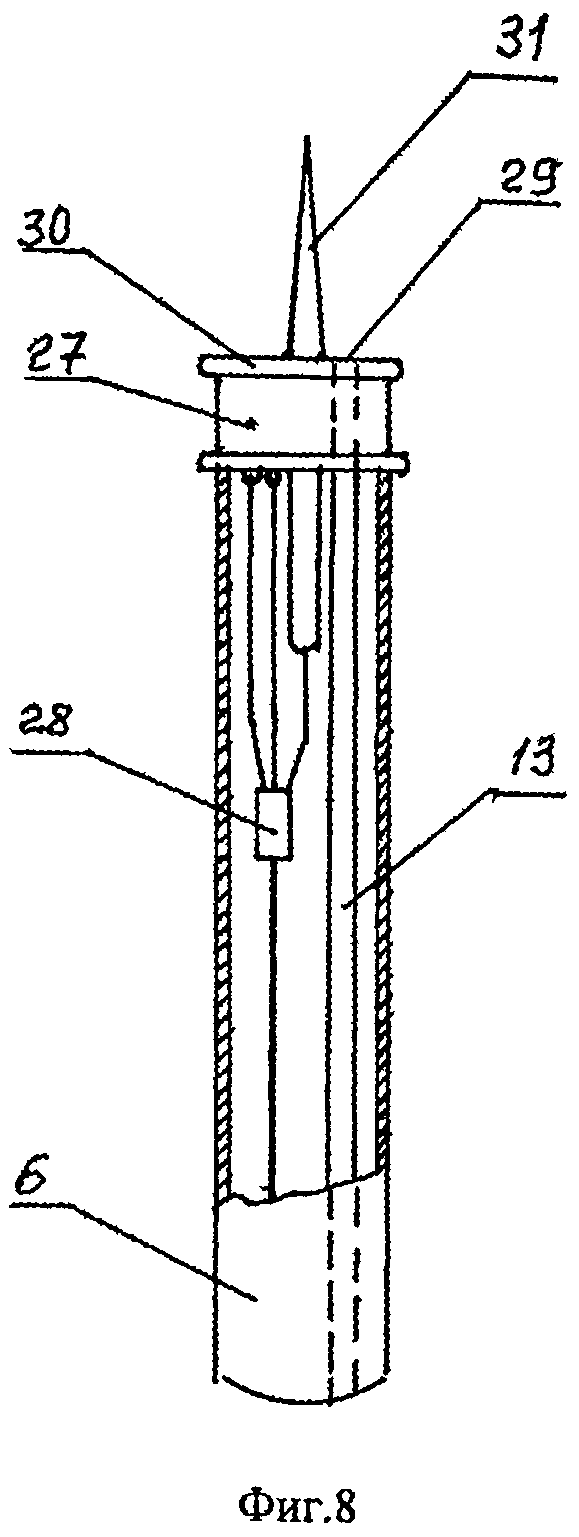
Электротермическое антенное устройство
Представляет собой ВУ (6), в верхней части которого крепится электротермический бур (27). Основной элемент электротермобура - нагреватель, обеспечивающий плавление льда.
Бурение-протаивание происходит под воздействием тепла, выделяемого нагревателем. Питание нагревателя осуществляется от судовой сети (28). Для удаления морской воды из отверстия (29) через головку бура подается ВВД по трубопроводу (13). Для получения информации о пройденном расстоянии при бурении льда снизу на головке электротермобура имеется датчик контакта его со льдом (30), выполняющего ту же роль, что и в случае с паровоздушным антенным устройством и механическим буром. Во избежание перегорания нагревателя питание на нагреватель подается до тех пор, пока головка электротермобура не выйдет на поверхность ледового покрова (3).
Потребляемую мощность электрического тока для образования сквозного отверстия можно приблизительно оценить по формуле [Кухлинг X. Справочник по физике. - М.: Высшая школа, 1983. - 520 с.]:

где Мл - масса расплавленного льда;
Сл - удельная теплоемкость льда;
L - удельная теплота плавления льда;
Т - средняя температура льда;
k - коэффициент, учитывающий потери тепла (k=1,2).
Время, необходимое для плавления льда заданной массы, может быть найдено из выражения:

Процесс обсервации с использованием электротермического антенного устройства не отличается от описанного выше. Принципиальная схема антенны с электротермобуром приведена на фиг.8, где
6 - ВУ;
13 - Трубопровод ВВД;
27 - Нагреватель электротермобура;
28 - Кабель с электропитанием от судовой сети;
30 - Датчик контакта электротермобура со льдом;
31 - Антенна СНА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2119703C1 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2295808C2 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ПРИ НАХОЖДЕНИИ ПОДВОДНОГО ОБЪЕКТА НА ГОРИЗОНТЕ ПЛАВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГИДРОАКУСТИЧЕСКОГО КАНАЛА ПЕРЕДАЧИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2008 |
|
RU2398316C2 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ НА ГОРИЗОНТЕ ПЛАВАНИЯ | 2007 |
|
RU2342746C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПОДЪЕМА ИЗ-ПОДО ЛЬДА | 2019 |
|
RU2729852C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
| РАДИОБУЙ ПОДВОДНОГО ПЛАВСРЕДСТВА ПОДЛЕДНЫЙ | 2018 |
|
RU2690788C1 |
| РАДИОБУЙ ДЛЯ ПЕРЕДАЧИ СИГНАЛОВ БЕДСТВИЯ ИЗ-ПОДО ЛЬДА | 2020 |
|
RU2737151C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
Изобретение относится к области использования спутниковых навигационных систем в высоких широтах. Технический результат - прием сигналов спутниковых навигационных систем второго поколения для производства подледной обсервации в произвольный момент времени. Устройство подледного приема сигналов спутниковых навигационных систем (СНС) объектом, находящимся в подледном положении, включающее приледнение объекта и разрушение льда в зоне расположения антенного устройства, отличающееся тем, что содержит выдвижное устройство, представляющее собой полую трубу диаметром до 150 мм, на верхней части которой крепится перфорированный тор, а внутри проложены паропровод и трубопровод с воздухом высокого давления (ВВД), при этом перфорированный тор содержит смесительные сопла-форсунки для направленного выхода пара, с целью сквозного разрушения (плавления) льда снизу, для образования отверстия и подачи воздуха высокого давления с целью удаления морской воды из созданного отверстия для прохода антенны наружу на заданную высоту, определяемую датчиком контакта выдвижного устройства со льдом, при этом выдвижное устройство перемещается в вертикальной плоскости и вращается с помощью редуктора от электромотора и устанавливается в заданном месте на рубке подводного объекта, и содержит антенну для приема сигналов СНС, выход антенны соединен с входом вычислительного блока, осуществляющего определение высоты подъема выдвижного устройства, выбор оптимального режима подачи теплоносителя и его регулирования в зависимости от заданного режима паробурения, а также расчет обсервованных координат места подводного объекта. 2 з.п. ф-лы, 6 ил.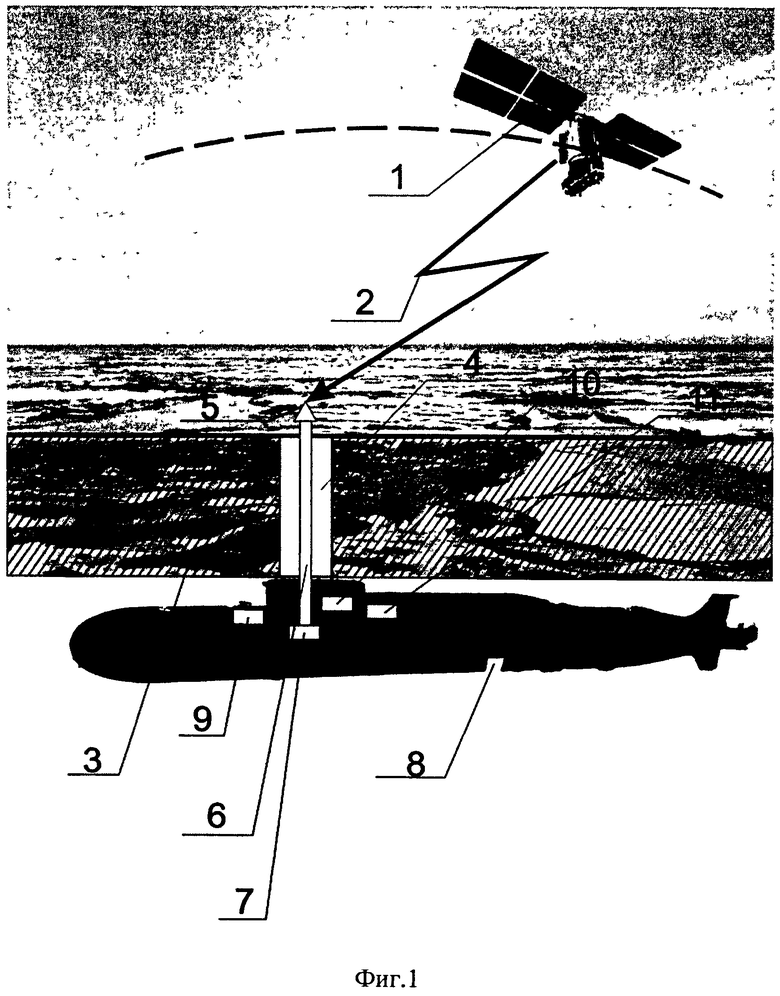
1. Устройство подледного приема сигналов спутниковых навигационных систем (СНС) объектом, находящимся в подледном положении, включающее приледнение объекта и разрушение льда в зоне расположения антенного устройства, отличающееся тем, что содержит выдвижное устройство, представляющее собой полую трубу диаметром до 150 мм, на верхней части которой крепится перфорированный тор, а внутри проложены паропровод и трубопровод с воздухом высокого давления (ВВД), при этом перфорированный тор содержит смесительные сопла-форсунки для направленного выхода пара, с целью сквозного разрушения (плавления) льда снизу, для образования отверстия и подачи воздуха высокого давления с целью удаления морской воды из созданного отверстия для прохода антенны наружу на заданную высоту, определяемую датчиком контакта выдвижного устройства со льдом, при этом выдвижное устройство перемещается в вертикальной плоскости и вращается с помощью редуктора от электромотора и устанавливается в заданном месте на рубке подводного объекта, и содержит антенну для приема сигналов СНС, выход антенны соединен с входом вычислительного блока, осуществляющего определение высоты подъема выдвижного устройства, выбор оптимального режима подачи теплоносителя и его регулирования в зависимости от заданного режима паробурения, а также расчет обсервованных координат места подводного объекта.
2. Устройство по п. 1, отличающееся тем, что разрушение льда осуществляют с помощью механического бура, содержащего антенну для приема спутниковых навигационных сигналов, которые закреплены в верхней части выдвижного устройства, представляющего собой полую трубу диаметром до 150 мм, внутри которой проложен трубопровод воздуха высокого давления для удаления морской воды из создаваемого буром отверстия, перемещаемое в вертикальной плоскости и вращаемое с помощью редуктора от электромотора, закрепленное в заданном месте на рубке подводного объекта и содержащее антенну для приема сигналов СНС, выход антенны соединен с входом вычислительного блока, осуществляющего определение высоты подъема выдвижного устройства, выбор оптимального режима бурения, а также расчет обсервованных координат места подводного объекта.
3. Устройство по п.1, отличающееся тем, что разрушение льда осуществляют с помощью электротермобура, содержащего антенну для приема спутниковых навигационных сигналов, которые закреплены в верхней части выдвижного устройства, представляющего собой полую трубу диаметром до 150 мм, внутри которой проложен трубопровод воздуха высокого давления для удаления морской воды из создаваемого термобуром отверстия, перемещаемое в вертикальной плоскости и вращаемое с помощью редуктора от электромотора, закрепленного в заданном месте на рубке подводного объекта и содержащее антенну для приема сигналов СНС, выход антенны соединен с входом вычислительного блока, осуществляющего определение высоты подъема выдвижного устройства, выбор оптимального режима термобурения, а также расчет обсервованных координат места подводного объекта.
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2295808C2 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2119703C1 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2295808C2 |
| US 6961657 B1, 01.11.2005 | |||
| US 6195057 B1, 27.02.2001 | |||
| US 5319376 A, 07.02.1994 | |||
| US 5593332 A, 14.02.1997 | |||

