Изобретение относится к области морской навигации и судовождения по ведущему кабелю, а также к подводным навигационным системам с гидроакустическими маяками-ответчиками, и может быть использовано для разработки технических средств навигационного обеспечения, связи и управления надводных и подводных объектов навигации в стесненных условиях плавания, преимущественно в арктических и прилегающих к ним акваториях, в частности на Северном морском пути (СМП).
Указанная аппаратура позволяет определять положение объекта навигации относительно вертикальной плоскости кабеля с высокой точностью, при этом существенным недостатком является неопределяемость местоположения вдоль трассы кабеля.
Известны автономные гидроакустические маяки-ответчики (RU, патент 2292057, опубл. 20.01.2007), а также навигационные системы, содержащие несколько донных гидроакустических маяков с различными частотами излучения (RU, патент 2483326, опубл. 26.05.2013), и судовые устройства кодированного запроса.
Принцип их работы основан на измерении временных интервалов распространения гидроакустических сигналов от объекта навигации до маяка и обратно, их преобразовании в дистанцию при известной скорости звука в морской воде и вычислении координат места объекта навигации или поправки к их счислимым координатам.
Основным преимуществом гидроакустических систем является большая дальность действия при сравнительно небольшом энергопотреблении.
К недостаткам относятся малый срок службы, определяемый автономным источником питания, величиной саморазряда и интенсивностью работы.
Известно, что для устранения этого недостатка путем многократного использования маяка в его конструкцию вводят механизм отделения плавучей части от якоря с последующим укомплектованием новыми или восстановленными аккумуляторами и новым якорным устройством (Бородин В.И., Смирнов Г.Е., Толстикова Н.А., Яковлев Г.В. Гидроакустические навигационные средства. - Л.: Судостроение, 1983, с. 70). Это решение сопряжено со значительными организационно-техническими и производственными трудностями: выходом в море специальных плавсредств для вызова, обнаружения и подъема маяка; допустимыми гидрометеоусловиями - состоянием моря, отсутствием льда, уровнем оптической видимости и др., а в условиях полярной ночи и высокой степени сплоченности льда такая работа представляется практически невозможной.
Тем не менее такое предложение может быть рациональным для особо сложных и дорогостоящих маяков.
Серьезной проблемой эксплуатации автономных маяков-ответчиков является неопределенность текущего состояния оставшегося энергоресурса вследствие неконтролируемого объема работ - количества ответов, технологической неоднородности саморазряда аккумуляторов и отдельных элементов батареи и, как следствие, возможность неожиданной потери связи с маяком, то есть ненадежность или невозможность гарантийных оценок действительного срока службы.
Известны (RU, патент 2125733, опубл. 28.05.1997) гидроакустические маяки-ответчики, в которых введены дополнительные источники ионизированных излучателей в экранированном защитном корпусе, а также накопитель электрической энергии для периодической подзарядки аккумулятора автономного маяка.
Надо отметить биологическую небезопасность используемых радиоизотопных термоэлектрических генераторов (РИТЭГ). Например (http://www.iaea.org/OurWork/ST/NE/NEFW/Technical-Areas/WTS/CEG/documents/26th-IAEA-CEG-PlenaryMeeting/Paris_RUS_PDF/4.1_RTG_Program_Paper_Rus.pdf), в настоящее время по всей арктической зоне, включая акватории СМП, идет утилизация оставшихся РИТЭГ.
Решения навигационных тактико-технических задач в значительной степени зависят от эффективности систем подводной (подледной) связи объекта навигации.
Известны системы (RU, патент 2287450, опубл. 20.11.2006), основанные на том, что подводный объект «выбрасывает» на поверхность моря кабельный радиобуй. В арктических акваториях, в условиях ледовой обстановки, этот способ становится проблематичным или невозможным в зависимости от степени ледового покрытия поверхности моря. К тому же работа радиобуя легко обнаруживается.
Известны также (http://www.libma.ru/tehnicheskie_nauki/sovetskie_atomnye_podvodnye_lodki/p21.php) способы связи, основанные на подвсплытии подводной лодки на малую, подповерхностную глубину, на которую проникают электромагнитные волны радиодиапазона. К недостаткам относится незащищенность подводной лодки от средств воздушного наблюдения и обнаружения, включая и спутниковые системы, а также технические трудности «освещения» локальной поверхности моря.
Известны и электромагнитные системы глобальной связи, основанные на крайне низких частотах (отечественная «Зевс» и американская «Sanguine», включая ее развитие - «Seafer», «AustereELF» и «ProjectELF»). Но они характеризуются чрезвычайно высокими затратами на сооружение и эксплуатацию, не получили дальнейшего развития по экономическим соображениям, а их преимущества, живучесть и надежность, в настоящее время представляются не бесспорными.
Следует отметить очевидные недостатки приемных устройств в виде буксируемых кабель-антенн длиной в сотни метров: необходимость стабилизации кабеля по глубине, конструктивная сложность управления выпуском и подбором антенны, существенное ухудшение маневренных характеристик ПЛ и так далее.
Таким образом, «классические» электромагнитные каналы подводной связи характеризуются ограниченной дальностью действия и малой информационной емкостью, но в сравнении с гидроакустической, звукоподводной связью обладают более высокой скоростью распространения сигнала и скрытностью работы, не подвержены многочисленным гидрологическим помехам.
Предлагаемая навигационная система имеет канал двухсторонней дальней связи по тракту: наземный комплекс управления - подводный кабель - позиционный гидроакустический маяк-ответчик. В качестве подводного канала связи могут быть использованы волоконно-оптические линии связи.
В Российской Федерации практически на всех флотах имеются полигоны, оборудованные подводными токоведущими кабелями, для тарировки лагов и определения маневренных элементов подводных лодок и надводных кораблей.
Арктическая навигационная система должна учитывать и известные особенности: ненадежная работа некоторых технических средств навигации в арктических широтах, например гироскопических и магнитных компасов; ограниченные точность и покрытие спутниковых систем навигации, в частности GPS и ГЛОНАСС, при работе в арктических широтах, а также их подверженность средствам противодействия; повышенную сложность СМП в навигационном отношении, многочисленными островами, проливами, малыми глубинами, неблагоприятными метеоусловиями - частыми и длительными туманами, ограниченными возможностями визуальной и астрономической обсервации, часто сложной ледовой обстановкой.
Наиболее близким аналогом разработанной системы навигации можно признать использование подводного токоведущего кабеля, проложенного по дну акватории, для вождения судов и подводных объектов в проливах, узкостях и в других условиях ограниченного плавания (ГОСТ 210 63-81, п. 48 «Судовая аппаратура ведущего кабеля. АВК»).
Недостатком известной системы можно признать недостаточную точность определения местонахождения плавсредства.
Техническая задача, решаемая изобретением, состоит в разработке подводной/подледной навигационной системы для арктических условий эксплуатации на традиционных маршрутах СМП, в которой устранены или уменьшены недостатки известных систем, к которым относятся неопределяемость местоположения объекта навигации вдоль трассы известной системы ведущего кабеля, невысокая точность судовождения гидроакустическими средствами в стесненных условиях плавания, малая дальность действия электромагнитных средств подводной навигации, ограниченный и слабо прогнозируемый срок службы гидроакустических маяков-ответчиков с автономным питанием, отсутствие защищенной подводной связи с объектами навигации, необходимость повышения безопасности плавания в ледовой обстановке, на малых глубинах, в частности, характерных для восточного сектора СМП и другие.
Технический результат, достигаемый при реализации разработанной системы навигации, состоит в повышении точности и безопасности судовождения на СМП при необходимом навигационном обеспечении, связи и управлении ледокольной и лоцманской проводкой судов и отдельных объектов навигации на наиболее сложных и ответственных его участках, например проливах и других опасных в навигационном отношении акваториях, кроме того, высокая точность судовождения относительно вертикальной плоскости ведущего кабеля, по меньшей мере, частично позволит с повышением интенсивности плавания в припайных ледовых полях сохранять коридор судоходным, не требующим ледокольного сопровождения.
Для достижения указанных результатов предложено использовать разработанную арктическую подводную навигационную систему для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания. Разработанная система содержит проложенный по дну ведущий кабель, береговой генератор тока и судовую аппаратуру. Кроме того, вдоль трассы кабеля дополнительно установлены, по меньшей мере, два гидроакустических маяка с различающимися частотами излучения импульсных сигналов, синхронизированных по тому же кабелю, при этом судовая аппаратура выполнена с возможностью определения положения объекта вдоль кабеля по гиперболическим изолиниям, соответствующим измеренным разностям времен прохождения сигналов от пары гидроакустических маяков, координаты которых заведомо известны.
Навигационная система содержит наземный комплекс, в состав которого входят генератор тока крайне низких частот (до 30 Гц), выполненный с возможностью генерирования и излучения электромагнитных импульсных сигналов по ведущему кабелю, генератор синхроимпульсов, выполненный с возможностью синхронно или с «кодированной» задержкой времени излучать импульсные сигналы различающихся частот гидроакустическими маяками, при котором судовая аппаратура выполнена с возможностью определения положения объекта навигации по измеренным значениям времени прохождения сигналов от каждого датчика - дальномерным методом и независимо от измеренной их разности, от пары датчиков - гиперболическим способом.
Навигационная система может дополнительно содержать ответвление, выполненное от ведущего кабеля. Указанное ответвление представляет собой кабель с гидроакустическим маяком-ответчиком с управляемой, адаптируемой дальностью действия для уменьшения демаскирования подводного объекта при навигационном определении и двухсторонней звукоподводной связи, при этом маяк-ответчик содержит источник автономного питания и устройство его подзарядки по кабелю.
Также навигационная система может быть выполнена с возможностью создания электромагнитного коридора судовождения крайне низких частот по ведущему кабелю за счет возбуждения второго электромагнитного поля более высокой частоты, соразмерной с необходимым уровнем повышения информационной емкости и надежности односторонней связи с подводным объектом в условиях устойчивого его вождения по трассе корабельной аппаратурой ведущего кабеля.
На акваториях, отягощенных ледовой обстановкой, навигационная система может дополнительно содержать установленный по трассе ведущего кабеля датчик эхоледомера с электронно-управляемой формой характеристики направленности, выполненный с возможностью определения наличия льда, измерения его толщины и размеров разводов в ледовом покрове, а также обнаружения несанкционированных надводных и подводных объектов и передачи информации по тому же кабелю на пункты управления проводкой судов.
Навигационная система может также содержать встроенный в ведущий кабель датчик гидростатического давления, выполненный с возможностью измерения (на участках малых глубин в период сезонных и приливно-отливных изменений) и передачи текущего значения глубины по тому же кабелю на наземный комплекс.
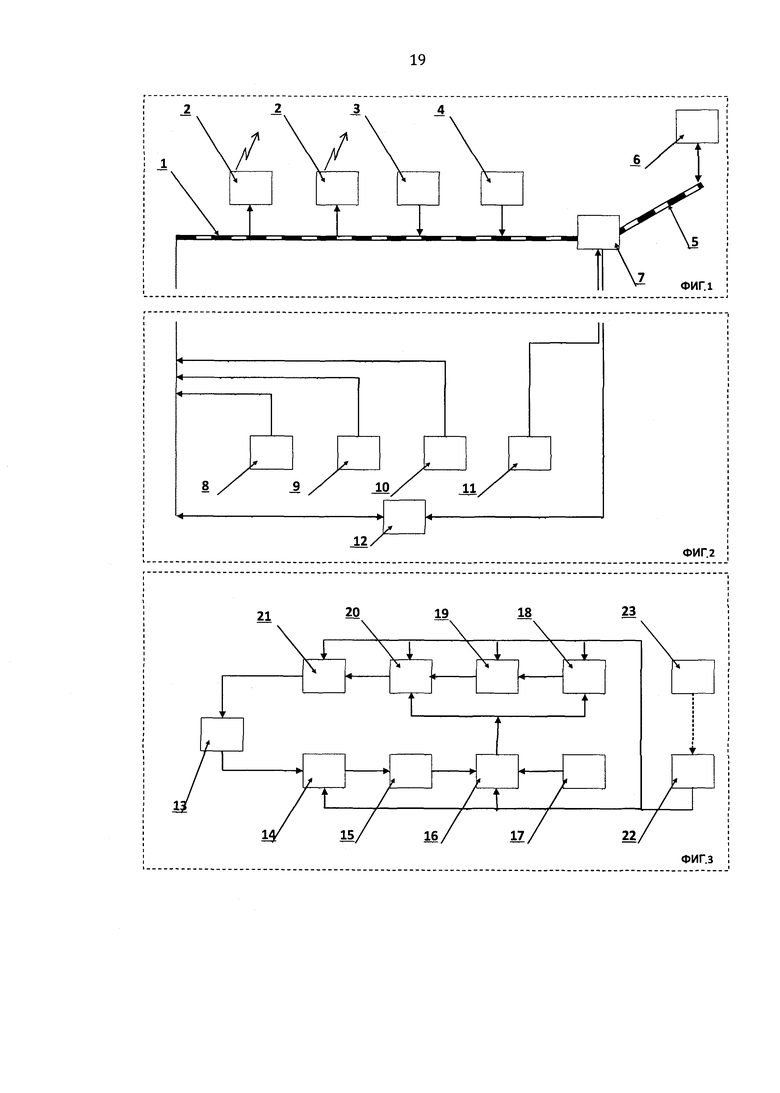
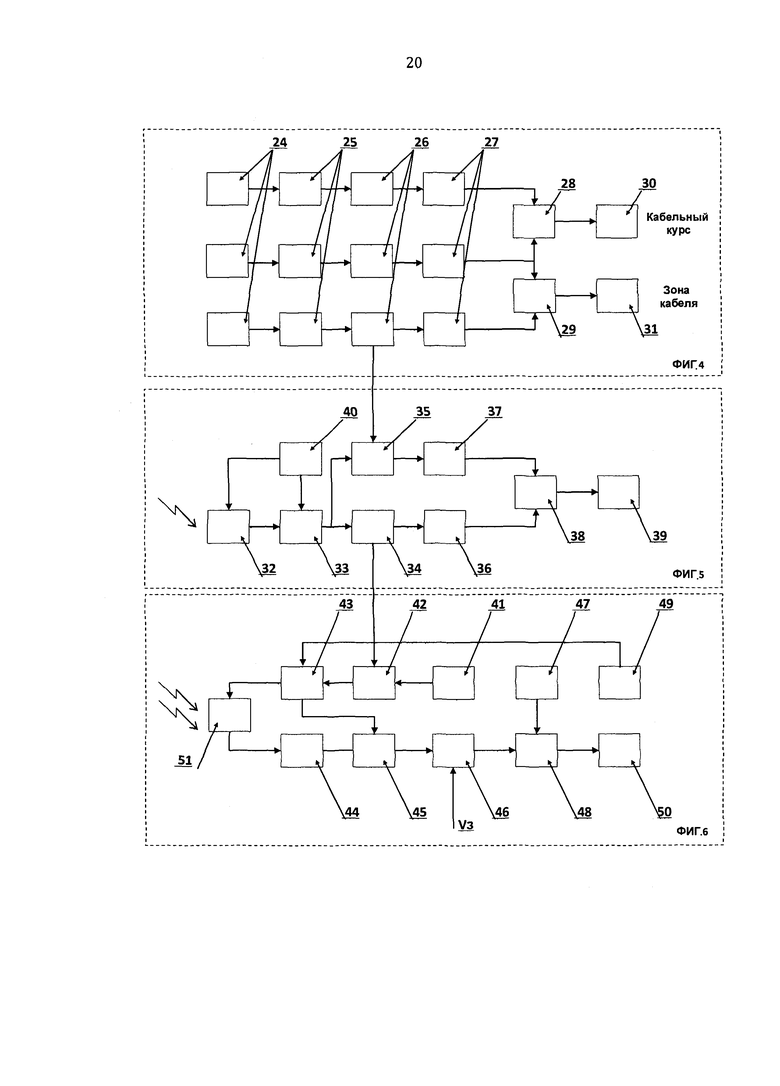
В дальнейшем сущность разработанной навигационной системы будет раскрыта в предпочтительном варианте реализации с использованием графического материала, где на фиг. 1 приведена блок-схема подводного комплекса навигационной системы, на фиг. 2 - схема наземного комплекса, на фиг. 3 - схема гидроаккустического маяка-ответчика, на фиг. 4 - электромагнитная часть, на фиг. 5 - гидроакустическая часть для надводных объектов, на фиг. 6 - гидроакустическая часть для подводных объектов, при этом использованы следующие обозначения: ведущий кабель 1, гидроакустический кабельный маяк 2, эхоледомер 3, датчик гидростатического давления 4, кабель-антенна 5, гидроакустический маяк-ответчик 6, электромагнитный модулятор 7, генератор крайне низких частот 8, генератор питания 9, генератор синхроимпульсов 10, генератор модулированных электромагнитных сигналов 11, вычислительно-информационный блок 12, приемо-передающая антенна 13, усилитель приемного канала 14, дешифратор 15, коммутатор 16, блок установки кода 17, устройство включения канала излучения 18, блок управления дальностью действия 19, усилитель мощности 20, устройство задержки времени 21, блок питания 22, устройство подзарядки от кабеля 23, индукционные катушки 24, предварительные усилители 25, избирательные усилители 26, преобразователи 27, блоки отношения сигналов: «кабельный курс» 28 и «зона кабеля» 29 с соответствующими индикаторами 30 и 31, приемная антенна 32, многоканальный усилитель 33, измеритель интервала времени 34, измеритель времени прохождения сигнала от каждого маяка 35, преобразователь времени в разности расстояний 36, преобразователь времени в расстояние до каждого маяка 37, вычислительное устройство 38, индикатор координаты объекта по трассе кабеля 39, а также блок питания 40, блок кодирования 41, блок установки дальности 42, генератор импульсов 43, блок дешифрования 44, измеритель времени 45, преобразователь времени в расстояние 46, блок разности глубин 47, вычислительное устройство 48, блок питания 49, блок индикации координат 50, гидроакустическая станция 51.
Подводный комплекс (фиг. 1) состоит из проложенного по дну акватории ведущего кабеля 1 с установленными по трассе судовождения кабельными гидроакустическими маяками различимых частот излучения 2, эхоледомером 3, датчиком гидростатического давления 4 для определения глубины и изменений, например, приливно-отливного характера, а также из кабель-антенны подводной электромагнитной связи и вождения 5, гидроакустического маяка-ответчика дальнего действия 6 для определения места по измерениям дистанции до маяка в режиме «кодированный запрос и ответ» и пеленга на него и электромагнитного модулятора подводной связи 7.
Наземный комплекс (фиг. 2) включает генератор тока крайне низких частот (3-30 Гц) 8 для судовождения по трассе ведущего кабеля, надводных и подводных объектов, генератор питания 9 кабельных гидроакустических маяков, эхоледомера, датчика, гидростатического давления, генератор синхронизированных импульсов 10, генератор модулированных электромагнитных сигналов 11 для подводной электромагнитной связи «в зоне ведущего кабеля» и вычислительно-информационный блок 12.
Маяк-ответчик (фиг. 3) включает гидроакустическую приемопередающую антенну 13, усилитель приемного канала 14, дешифратор 15, коммутатор 16, второй вход которого соединен с выходом блока установки заданного кода 17 «вызова маяка», далее устройство включения выходного канала со схемой сброса 18, блок управления энергетической дальностью действия 19, усилитель мощности 20, выход которого через устройство задержки времени 21 подключен к электромагнитному модулятору подводной связи и на передающий тракт гидроакустической антенны. Ко всем токопотребляющим узлам и блокам маяк-ответчика подключены аккумуляторная батарея химических источников 22 и/или устройство подзарядки 23 от кабельного питания.
Судовая аппаратура состоит из электромагнитной части (фиг. 4) и гидроакустической части для надводных кораблей и судов (фиг. 5) и подводных лодок и аппаратов (фиг. 6).
Электромагнитная часть (фиг. 4) судовой аппаратуры включает приемное устройство, состоящее из магнитоиндукционных датчиков - трех ортогонально расположенных по главным корабельным осям (x, y, z) высокочувствительных индукционных катушек 24, с соответствующими предварительными усилителями 25. Приемное устройство аппаратуры ведущего кабеля является выносным прибором, устанавливается в зоне наименьшего электромагнитного экранирования. Измерительный блок включает избирательные усилители 26, преобразователи 27, блок отношения сигналов 28, определяющий индикацию 30 «кабельный курс» («кабель слева», «кабель справа»), и блок отношения сигналов 29, определяющий индикацию «зона кабеля» 31.
Гидроакустическая часть для надводных объектов (фиг. 5) включает приемную гидроакустическую антенну 32; многоканальный избирательный усилитель 33; измеритель разности времени прохождения сигналов от кабельных маяков 34; преобразователь разности времени попарно синхронизированных гидроакустических сигналов в разность расстояния 36, вычислительное устройство 38 для определения характерной гиперболы, в фокусах которой находятся кабельные маяки, индикатор координат объекта навигации по трассе кабеля 39 и блок питания 40.
Для повышения точности и надежности обсервации надводного объекта излучают электромагнитный сигнал в воздушной среде, синхронизированный по кабелю с гидроакустическим сигналом кабельного маяка, который воспринимается индукционным приемником АВК для включения измерителя времени 35 прохождения гидроакустического сигнала от каждого маяка до объекта навигации, преобразование этого времени в соответствующие расстояния 37 и далее в вычислительное устройство 38 для определения координат объекта и его индикации 39.
Гидроакустическая часть для подводных объектов (фиг. 6) включает блок кодирования 41, блок установки энергетической дальности 42 и генератор импульсов 43, второй вход которого подключен к блоку измерения времени прохождения гидроакустического сигнала 45 от объекта навигации до маяка-ответчика и обратно. Ответный сигнал после блока дешифрации 44 и измерителя времени 45 с учетом скорости звука в море преобразуется в расстояние 46 и далее в вычислительное устройство 48, на второй вход которого поступает информация о разности глубин места маяка-ответчика и объекта навигации 47, определяются географические координаты объекта, поступающие на приборные индикаторы 50 блока индикации координат.
Следует отметить, что имеющаяся на подводных объектах штатная гидроакустическая станция 51 может выполнить функции передачи и приема кодированного сигнала и определить дистанцию до маяка-ответчика и пеленг на него, при этом структура функциональной схемы упрощается.
Сущность изобретения состоит в следующем. В ведущий кабель вводятся два или более гидроакустических маяков, излучающих синхронизированные импульсы различимых частот, при этом определяется гиперболическая изолиния разности расстояний объекта навигации от кабельных маяков. Одновременно или с точно известным интервалом времени (кодовая задержка) с гидроакустическими импульсами излучают электромагнитные импульсы, воспринимаемые магнитоиндукционным приемником судовой аппаратуры ведущего кабеля, при этом определяется время прохождения гидроакустического сигнала от каждого кабельного маяка до объекта навигации. Таким образом, надежность и точность обсервации повышается за счет информационной избыточности измерений гиперболическим и дальномерным способами.
Другая сущность разработанного устройства состоит в том, что в электромагнитную систему ведущего кабеля для расширения акватории навигационной системы включен гидроакустический «позиционный» маяк-ответчик с управляемой дальностью действия, автономным питанием и устройством его подзарядки.
Еще одно отличие состоит в том, что с целью повышения уровня защищенности гидроакустическая связь дополнена электромагнитным каналом связи с известными ограничениями по информационной емкости и дальности действия, сущность которой состоит в том, что подводный объект на трассе ведущего кабеля в небольшом коридоре распространения электромагнитных волн крайне низких частот одновременно облучается электромагнитным полем более высокой частоты, характеризуемой большей информационной емкостью и определяемой соразмерным объемом необходимой односторонней информации, при этом корабельная аппаратура ведущего кабеля (АВК) с высокой точностью удерживает судно в зоне кабеля, что гарантирует устойчивую связь на время сеанса и практически полную ее защищенность.
Такая подводная электромагнитная связь с высокой степенью защиты дополняет гидроакустическую двухстороннюю связь с управляемой дальностью по схеме: наземный объект - проводная подводная связь - позиционный гидроакустический маяк-ответчик - подводный объект.
Кроме того, в ведущий кабель введен эхоледомер с изменяемой характеристикой направленности для определения наличия льда, его толщины, скорости ледообразования, а также мониторинга разрешительного порядка судовождения и обзора подводной обстановки по трассе ведущего кабеля.
Для повышения безопасности плавания на малых глубинах, характерных для прибрежных окраинных морей восточного сектора СМП, а также в проливах, устьях рек, в период сезонных или приливно-отливных изменений, в ведущий кабель введен датчик гидростатического давления для дистанционного измерения и передачи текущего значения глубины в наземный пункт управления.
Осуществление изобретения и его практическое использование можно ожидать в следующих основных направлениях.
Для осуществления предполагается конструкторская разработка и производство:
1. Подводного комплекса в модульном исполнении основных функциональных блоков для формирования различной его структуры в зависимости от реальных условий акваторий и тактико-технических требований к навигационной системе.
2. Наземного комплекса, включающего спецификацию существующего и разработку нового оборудования в соответствии с функциональной схемой.
3. Судовой аппаратуры.
3.1. Для ледоколов проводки судов и надводных кораблей и судов ледового класса плавания.
3.2. Для подводных объектов навигации с приемным устройством в герметичном, гидростатическом прочном корпусе, предназначенным для работы в режимах:
3.2.1. Вождения по ведущему кабелю.
3.2.2. Вождения и электромагнитной связи в «зоне кабеля» с наземным объектом.
3.3. Переносного варианта для лоцманской проводки судов по трассе ведущего кабеля.
Многочисленные острова и другие особенности акватории позволяют отнести к перспективным задачам развитие региональной сети подводного ведущего кабеля для навигационного обеспечения транспортных магистралей, а также для высокоточной обсервации в подводно-подледном пространстве с покрытием исключительной экономической зоны арктического сектора Российской Федерации.
Навигационная система может быть использована при проведении геофизических и океанографических исследований с использованием подводных аппаратов, а также для обеспечения подходов к отдельным морским основаниям арктического шельфа в сложных в навигационном отношении и стесненных условиях судовождения.
Изобретение относится к области морской навигации и судовождения по ведущему кабелю, а также к подводным навигационным системам с гидроакустическими маяками-ответчиками, и может быть использовано для разработки технических средств навигационного обеспечения, связи и управления надводных и подводных объектов навигации в стесненных условиях плавания, преимущественно в арктических и прилегающих к ним акваториях, в частности на Северном морском пути (СМП). Система содержит проложенный по дну ведущий кабель, береговой генератор тока и судовую аппаратуру. Дополнительно вдоль трассы кабеля установлены, по меньшей мере, два гидроакустических маяка с различающимися частотами излучения импульсных сигналов, синхронизированных по тому же кабелю. Судовая аппаратура выполнена с возможностью определения положения объекта вдоль кабеля по гиперболическим изолиниям, соответствующим измеренным разностям времен прохождения сигналов от пары гидроакустических маяков, координаты которых заведомо известны. Технический результат, достигаемый при реализации разработанной системы навигации, состоит в повышении точности и безопасности судовождения на СМП при необходимом навигационном обеспечении, связи и управлении ледокольной и лоцманской проводкой судов и отдельных объектов навигации на наиболее сложных и ответственных его участках. 5 з.п. ф-лы, 6 ил.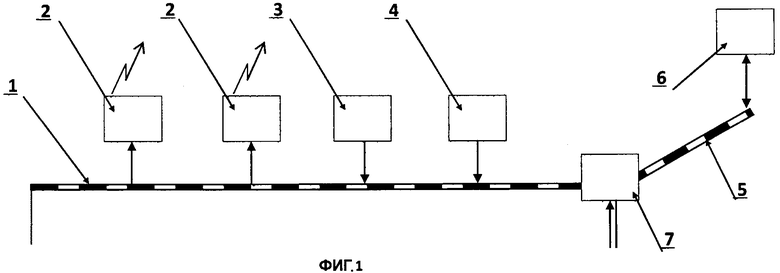
1. Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания, содержащая проложенный по дну ведущий кабель, береговой генератор тока и судовую аппаратуру, отличающаяся тем, что дополнительно вдоль трассы кабеля установлены, по меньшей мере, два гидроакустических маяка с различающимися частотами излучения импульсных сигналов, синхронизированных по тому же кабелю, при этом судовая аппаратура выполнена с возможностью определения положения объекта вдоль кабеля по гиперболическим изолиниям, соответствующим измеренным разностям времен прохождения сигналов от пары гидроакустических маяков, координаты которых заведомо известны.
2. Навигационная система по п. 1, отличающаяся тем, что она дополнительно содержит наземный комплекс, в состав которого входят генератор тока крайне низких частот, выполненный с возможностью генерирования и излучения электромагнитных импульсных сигналов по ведущему кабелю, генератор синхроимпульсов, выполненный с возможностью синхронно или с «кодированной» задержкой времени излучать импульсные сигналы различающихся частот гидроакустическими маяками, при котором судовая аппаратура выполнена с возможностью определения положения объекта навигации по измеренным значениям времени прохождения сигналов от каждого датчика - дальномерным методом и независимо от измеренной их разности от пары датчиков - гиперболическим способом.
3. Навигационная система по п. 1, отличающаяся тем, что она дополнительно содержит ответвление, выполненное от ведущего кабеля, кабеля с гидроакустическим маяком-ответчиком с управляемой, адаптируемой дальностью действия для уменьшения демаскирования подводного объекта при навигационном определении и двухсторонней звукоподводной связи, при этом маяк-ответчик содержит источник автономного питания и устройство его подзарядки по кабелю.
4. Навигационная система по п. 1, отличающаяся тем, что она выполнена с возможностью создания электромагнитного коридора судовождения крайне низких частот по ведущему кабелю за счет возбуждения второго электромагнитного поля более высокой частоты, соразмерной с необходимым уровнем повышения информационной емкости и надежности односторонней связи с подводным объектом в условиях устойчивого его вождения по трассе корабельной аппаратурой ведущего кабеля.
5. Навигационная система по п. 1, отличающаяся тем, что на акваториях, отягощенных ледовой обстановкой, она дополнительно содержит установленный по трассе ведущего кабеля датчик эхоледомера с электронно-управляемой формой характеристики направленности, выполненный с возможностью определения наличия льда, измерения его толщины и размеров разводов в ледовом покрове, а также обнаружения несанкционированных надводных и подводных объектов и передачи информации по тому же кабелю на пункты управления проводкой судов.
6. Навигационная система по п. 1, отличающаяся тем, что она дополнительно содержит встроенный в ведущий кабель датчик гидростатического давления, выполненный с возможностью на участках малых глубин в период сезонных и приливно-отливных изменений измерения и передачи текущего значения глубины по тому же кабелю на наземный комплекс.
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
| ПРИЕМНАЯ МНОГОЭЛЕМЕНТНАЯ КОМПЕНСИРОВАННАЯ АНТЕННА ДЛЯ ГЛУБОКОВОДНОГО ФАЗОВОГО БАТИМЕТРИЧЕСКОГО ГИДРОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2209530C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| ДОННОЕ МОРСКОЕ СТОРОЖЕВОЕ УСТРОЙСТВО | 2006 |
|
RU2317514C1 |
| WO2009032836 A1, 12.03.2009. | |||

