Изобретение относится к технике электрической связи, в частности к способам прокладки морского кабеля связи, и может найти применение при прокладке кабелей в условиях, где другие способы прокладки использовать нельзя, например для прокладки кабелей в условиях Арктики и Антарктики.
Известен способ прокладки морских кабелей с помощью кабелеукладчиков, представляющих собой специальные морские суда (Каганович А.А., Хайзерур Е.М. Судна для прокладки подводных кабелей связи. Л.: Судостроение, 1998. [1]).
Недостатком такого способа является то, что при сравнительно небольших волнениях на море кабелеукладчик прекращает работу и ложится в дрейф, чтобы не оборвался и не потерялся кабель, так как найти оборванный конец - задача чрезвычайно сложная. Известно, что при прокладке линии ТАТ-8 оборванный кабель искали 90 суток. Указанный способ также совершенно не пригоден для прокладки кабеля во льдах. Не спасает даже применение ледоколов, так как проложенная канава быстро вновь смерзается, а льды, которые ломает ледокол, могут легко повредить спускаемый кабель.
Известно достаточное количество и других способов прокладки кабеля, например по патентам FR №2253881 и №2415381 [2-3].
Однако все эти способы предполагают размещение кабеля на кабелеукладочном судне, двигающемся по поверхности водоема. Поэтому скорость и условия прокладки связаны целиком с надводным судном.
Известно также применение самоходных подводных аппаратов для ремонта и заглубления кабеля, но не для прокладки кабеля в любых условиях (Заявка Японии N56-39125, 1981 [4]). Прокладка кабеля производится с буксируемого транспортным средством устройства, находящегося в подводном состоянии, на котором размещен барабан с кабелем. Однако использовать этот способ для прокладки кабелей во льдах также нельзя.
Известен также способ прокладки морских подводных кабелей (Патент RU №2069932 [5]), в котором решается задача устранения влияния внешних условий льда, волнений на море при прокладке морских подводных кабелей и обеспечения возможности прокладки морских кабелей в любых районах Земного шара.
Это достигается тем, что прокладку кабеля производят с помощью транспортного и транспортируемого судов, в качестве которых используется подводная лодка и связанный с ней тендер, снабженный кабельным отсеком с автоматической системой управления спуском кабеля и укладкой его на дно, обитаемым отсеком для сращивания и контроля кабеля и автоматическим устройством для поддержания тендера на заданном расстоянии от дна, путем заполнения кабельного отсека водой по мере расхода кабеля, при этом прокладка кабеля производится без всплытия подводной лодки на поверхность.
При этом специальный тендер представляет собой вспомогательное судно, например выработавшую ресурс подводную лодку со снятым двигателем и вооружением, способное погружаться на дно и связанное с подводной лодкой таким образом, чтобы последняя не потеряла маневренность. В тендере находится автоматическая система управления спуском кабеля и укладки его на дно. Эта система снабжена плугом для рытья траншеи. Запас кабеля находится в тендере в специальных отсеках.
По мере расходования кабеля при прокладке вес тендера будет уменьшается и он будет всплывать. Чтобы этого не случилось, кабельный отсек заполняется водой в количестве, равном весу израсходованного кабеля. Заполнение происходит с помощью автоматического устройства, которое замеряет скорость расходуемого кабеля и вычисляет его вес. Например, оно может быть выполнено в виде автоматического клапана, регулируемого измерителем скорости прокладки кабеля и соединяющего кабельный отсек с забортным пространством. Сечение клапана автоматически меняется в зависимости от скорости прокладки кабеля.
Автоматическое устройство заполняет отсеки водой в таком количестве, чтобы тендер держал заданное расстояние от дна.
Общее погружение тендера осуществляется заполнением балластных цистерн водой.
Для сращивания и контроля кабеля на тендере имеется специальный обитаемый отсек. Применение мощных подлодок и тендеров позволит за один проход прокладывать до 15 тысяч кабеля на расстояние до 4 тысяч км.
Однако при практической эксплуатации такого устройства необходимо обеспечить решение, по крайней мере, еще двух задач.
Первая задача заключается в увеличение запаса глубины под тендером, чтобы при укладке кабеля не произошла посадка тендера на морское дно, особенно при непостоянном рельефе дна, а вторая задача заключается в обеспечении позиционирования как транспортного средства (буксировщика), так и буксируемого кабелеукладчика (тендера) при наличии крупных ледовых полей или сплошного льда по трассе укладки кабеля.
Возможная посадка тендера на морское дно обусловлена причинами возникновения отрицательного давления под днищем тендера, которое обуславливает возникновение дополнительно осадки ΔТ и дифферентного угла α. Проявление этих факторов приводит к уменьшению запаса глубины под тендером и даже к посадке тендера на дно судового хода, а появление дифферентного угла приводит к существенному увеличению сопротивления движения тендера.
Для уменьшения (или полного исключения) этих неблагоприятных факторов необходимо нейтрализовать отрицательное давление под тендером. Это можно осуществить путем аэрации потока под тендером в зоне больших отрицательных давлений или путем подачи под днище воды.
Задачей изобретения является расширение функциональных возможностей способа прокладки морских подводных кабелей в экстремальных условиях.
Поставленная задача решается за счет того, что в способе прокладки морских подводных кабелей, при котором прокладку кабеля на дно осуществляют с буксируемого транспортным судном кабелеукладчика, находящегося в подводном состоянии и имеющего средства для размещения запаса кабеля и автоматическую систему управления спуском кабеля и укладки его на дно, в качестве транспортирующего судна используют подводную лодку, а в качестве буксируемого кабелеукладчика - тендер, снабженный кабельным отсеком, обитаемым отсеком для сращивания и контроля кабеля, при этом прокладку осуществляют при подводном положении лодки, а тендер в процессе прокладки поддерживают на заданном расстоянии от дна путем заполнения кабельного отсека водой по мере расхода кабеля с помощью автоматического устройства, в котором в отличие от прототипа дополнительно выполняют нейтрализацию отрицательного давления под днищем тендера путем аэрации потока воды под тендером в зоне отрицательных давлений и выполняют позиционирование тендера относительно трассы укладки кабеля посредством системы подводной навигации и судового модуля навигации и позиционирования транспортным судном кабелеукладчика, включающего, по крайней мере, две малогабаритные ИНС, гидроакустические средства измерения глубины и скорости и спутниковую навигационную систему и курсоуказатель, информационно соединенные с системой обработки регистрируемой информации.
Поставленная задача решается также за счет того, что в устройстве для прокладки морских подводных кабелей, включающем транспортирующее судно, выполненное в виде подводной лодки, буксируемый кабелеукладчик, выполненный в виде тендера с кабельным отсеком, в отличие от прототипа шпангоуты тендера выполнены в виде трубчатого шпангоута-аэратора, ниже плоскости плавания тендера расположены бортовые трубы, снабженные отверстиями-шпигатами, бортовые трубы сочленены с трубчатыми шпангоутами аэраторами, на транспортирующем судне дополнительно установлены многолучевой эхолот, гидроакустический параметрический профилограф, гидролокатор, две малогабаритные ИНС, первый и второй спускоподъемные устройства соответственно с первой и второй положительными плавучестями, внутри которых установлены соответственно первая и вторая антенны соответствующих приемников спутниковой навигационной системы, механизмы ввода антенн спутниковой навигационной системы в лед, на тендере установлен однолучевой эхолот.
Реализация способа поясняется чертежом (фиг.1).
Фиг.1. Блок-схема устройства. Устройство включает подводную лодку 1, тендер 2, в котором шпангоуты 3 выполнены в виде трубчатых шпангоутов-аэраторов, сочлененных с бортовыми трубами 4, расположенными ниже плоскости плавания и снабженные отверстиями-шпигатами 5. Тендер 2 соединен с подводной лодкой 1 посредством кабель-троса 6, через буксировочные узлы 26. На подводной лодке 1 также установлены многолучевой эхолот 7, гидроакустический параметрический профилограф 8, гидролокатор 9, две малогабаритные ИНС 10, первый и второй спускоподъемные устройства 11 соответственно с первой и второй положительными плавучестями 12, внутри которых установлены соответственно первая и вторая антенны 13 соответствующих приемников 14 спутниковой навигационной системы, механизмы 15 ввода антенн 13 спутниковой навигационной системы в лед 16 для связи с ИСЗ 17. На тендере 2 установлены устройство 18 для укладки кабеля в грунт 19, однолучевой эхолот 20. Однолучевой эхолот 20, многолучевой эхолот 7, гидроакустический параметрический профилограф 8, гидролокатор 9, две малогабаритные ИНС 10, приемники 14 спутниковой навигационной системы, гидроакустический лаг 21, курсоуказатель 22, приемопередатчики 25 информационно соединены с системой обработки регистрируемой информации 23. По трассе укладки кабеля установлены гидроакустические донные маяки приемоответчики 24, а на подводной лодке 1 и тендере 2 - приемопередатчики 25.
Способ реализуется следующим образом.
Как и в известном способе (прототипе) [5], прокладку кабеля производят с помощью транспортного и транспортируемого судов, в качестве которых используется подводная лодка 1 и соединенный с ней посредством кабель-троса 6 тендер 2, снабженный кабельным отсеком с автоматической системой управления спуском кабеля и укладкой его на дно, обитаемым отсеком для сращивания и контроля кабеля и автоматическим устройством для поддержания тендера 2 на заданном расстоянии от дна, путем заполнения кабельного отсека водой по мере расхода кабеля, при этом прокладка кабеля производится без всплытия подводной лодки 1 на поверхность.
При этом специальный тендер 2 представляет собой вспомогательное судно, например выработавшую ресурс подводную лодку со снятым двигателем и вооружением, способное погружаться на дно и связанное с подводной лодкой 1 таким образом, чтобы последняя не потеряла маневренность. В тендере 2 находится автоматическая система управления спуском кабеля и укладки его на дно. Эта система снабжена плугом для рытья траншеи. Запас кабеля находится в тендере 2 в специальных отсеках.
По мере расходования кабеля при прокладке вес тендера 2 будет уменьшается, и он будет всплывать. Чтобы этого не случилось, кабельный отсек заполняется водой в количестве, равном весу израсходованного кабеля. Заполнение происходит с помощью автоматического устройства, которое замеряет скорость расходуемого кабеля и вычисляет его вес. Например, оно может быть выполнено в виде автоматического клапана, регулируемого измерителем скорости прокладки кабеля и соединяющего кабельный отсек с забортным пространством. Сечение клапана автоматически меняется в зависимости от скорости прокладки кабеля.
Автоматическое устройство заполняет отсеки водой в таком количестве, чтобы тендер 2 держал заданное расстояние от дна, которое контролируется посредством однолучевого эхолота 20.
Общее погружение тендера осуществляется заполнением балластных цистерн водой. Для сращивания и контроля кабеля на тендере 2 имеется специальный обитаемый отсек.
Ввиду того что при движении тендера 2, особенно при не однородном рельефе дна, возникают области пониженного (отрицательного) давления, это может привести к нежелательным касаниям грунта или посадки тендера 2 на грунт, поэтому в предлагаемом техническом решении шпангоуты 3 выполнены в виде трубчатых шпангоутов-аэраторов, сочлененных с бортовыми трубами 4, расположенными ниже плоскости плавания и снабженными отверстиями-шпигатами 5. При этом трубчатые шпангоуты-аэраторы 3 заполняются водой из кабельного отсека посредством автоматического устройства и под давлением поступают в бортовые трубы 4, расположенные ниже плоскости плавания и снабженные отверстиями-шпигатами 5, через которые вода выходит в поток под тендером 2.
В период укладки кабеля при помощи первого и второго спускоподъемных устройств 11 доставляют до нижней кромки льда 16 в места А и С первую и вторую положительные плавучести 12, внутри которых установлены соответственно первая и вторая антенны 13, первый и второй приемники 14 СНС, первый и второй механизмы 15 ввода антенн 13 в лед 16, первую и вторую малогабаритные ИНС 10, первый и второй измерители времени, первый и второй блоки управления и первый и второй регистраторы системы обработки информации 22. После внедрения первой и второй антенн 13 в лед в места А и С их приледнения к нижней кромке льда 16 и приема ими сигналов космических аппаратов (КА) 17 измеряют параметры этих сигналов и определяют по значениям данных параметров обсервованные геодезические координаты мест А и С, при этом фиксируют время приема антеннами 13 сигналов КА. Повторяют все вышеописанные операции в местах В и Д второго приледнения к нижней кромке льда 16 и вновь фиксируют время приема антеннами 13 сигналов КА 17, а также время начала повторной доставки положительных плавучестей 12 от места расположения первого и второго спускоподъемных устройств 11 до нижней кромки льда 16. Затем определяют последовательно счислимые геодезические координаты первой и второй малогабаритной ИНС 14 с привязкой их по времени в течение периода, характеризующегося временем, прошедшим от первого внедрения первой и второй антенн 13 в лед 16, и повторным их внедрением в лед 16, в местах их повторного приледнения к нижней кромке льда. По полученным данным определяют расчетным путем обсервованные геодезические координаты мест расположения на подводном объекте соответственно первого и второго спускоподъемных устройств 11 по информации, полученной в один и тот же момент времени, а по ним определяют вычислительным путем поправку к истинному курсу.
Аналогом метода подледного приема сигналов спутниковых навигационных систем и устройства для его осуществления является методика, приведенная в описании к патенту RU №2295808.
В качестве аналога метода подледного приема сигналов спутниковых навигационных систем и устройства для его осуществления, может быть также использована методика, приведенная в описании к патенту RU 2342746 (Способ подледного приема сигналов спутниковых навигационных систем и устройство для его осуществления на горизонте плавания), в котором техническим результатом является обеспечение определения с требуемой точностью поправки к истинному курсу, вырабатываемому ИНС подводного объекта, при нахождении его подо льдом.
Сущность данного способа заключается в том, что в способе подледного приема сигналов СНС производится приледнение подводного объекта к нижней кромке льда рубкой и носовой частью в местах, где установлены антенны приемников СНС, ввод этих антенн в искусственно образованные полости во льду, при этом освобождаются полости от воды и принимаются на "сухие" антенны сигналы космического аппарата, по которым определяют обсервованные координаты мест размещения указанных антенн, и по полученным данным определяют расчетным путем поправку к истинному курсу, вырабатываемому ИНС подводного объекта.
Устройство для осуществления данного способа состоит из первой и второй антенн, приемников сигналов СНС, разнесенных на заданное расстояние, каждая из которых выполнена в виде головки, например механического бура, каждая из которых закреплена в верхней части первого и второго выдвижных устройств соответственно, представляющих собой полую трубу диаметром до 200 мм, внутри которой проложен трубопровод воздуха высокого давления, перемещаемых в вертикальной плоскости и вращаемых с помощью редукторов и электромоторов соответственно. При этом выдвижные устройства установлены в заданных местах рубки и в носовой части подводного объекта, Кроме того, устройство имеет первый и второй приемники сигналов СНС, вход которых соединен с выходом первой и второй антенн, блоком управления, блоком определения поправки к истинному курсу, вырабатываемому ИНС подводного объекта, при этом блок управления соединен с входами двух приемников сигналов СНС и с входом блока определения поправки к истинному курсу, вырабатываемому ИНС подводного объекта, выход которого соединен с выходами двух приемников 14 сигналов СНС.
В предлагаемом техническом решении однолучевой эхолот 20, многолучевой эхолот 7, гидроакустический параметрический профилограф 8, гидролокатор 9, две малогабаритные ИНС 10, приемники 14 спутниковой навигационной системы, гидроакустический лаг 21, курсоуказатель 22 информационно соединены с системой обработки информации 23, которая также соединена гидроакустическим каналом связи с установленными по трассе укладки кабеля гидроакустическими донными маяками приемоответчиками 24, что позволяет решить задачу позиционирования системы подводная лодка 1 - тендер 2 - укладочный кабель с определением как географических, так и геодезических координат.
Однолучевой эхолот 20 представляет собой штатный навигационный эхолот типа НЭЛ-М1, предназначенный для измерения, индикации и регистрации глубин под днищем тендера 2, в соответствии со стандартом INO S-44.
В качестве многолучевого эхолота 7 применен эхолот типа «Sea Bat 7150», позволяющий производить съемку рельефа дна в полосе 15 км, что позволяет оценивать изменения глубины и характера рельефа дна на участке большой площади по трассе укладки кабеля.
Гидролокатор 9 представляет собой параметрический гидролокатор, который работает в диапазоне разностных частот от 5 до 50 кГц. Причем разностная частота может изменяться в указанном диапазоне как вручную (плавно), так и автоматически от импульса к импульсу через 2, 4, 6, 8 и 10 посылок. Шаг перестройки в автоматическом режиме составляет 175 кГц. Перестройка разностной частоты может осуществляться и в течение одного импульса по линейному закону (излучение линейно-частотно-модулированных импульсов). Длительность зондирующих импульсов меняется от 0,1 до 300 мкс. Средняя частота накачки составляет 165 кГц. Ширина характеристики направленности во всем диапазоне частот постоянна и составляет 4 градуса. Посредством гидролокатора 9 обеспечивают контроль уложенного кабеля в границах траншеи.
Параметрический профилограф 8 работает на трех фиксированных частотах 7, 10.5 и 14 кГц. Излучение зондирующих сигналов длительностью 0,5-1 мкс обеспечивается нелинейным взаимодействием сигналов накачки с частотой 154 кГц и сигналов с частотами 147, 143.5 и 140 кГц соответственно. Ширина характеристики направленности излучающей параметрической антенны постоянна во всем диапазоне рабочих частот и составляет 2×4 градуса на уровне - 3 дБ. Ширина характеристики направленности на уровне - 3 дБ широкополосной приемной антенны в зависимости от рабочей частоты изменяется в пределах 10×26 градусов (на частоте 14 кГц) до 20×52 градусов (на частоте 7 кГц). Индикация эхо-сигналов в параметрическом профилографе 8 обеспечивается в цветовой гамме на экране электронного индикатора системы обработки информации 23. Посредством параметрического профилографа 8 контролируют глубину укладки кабеля путем профилирования донных осадочных пород и уложенного на дно кабеля.
Аналогами гидролокатора 9 и параметрического профилографа 8 являются устройства, описанные в кн.: Воронин В.А.. Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. Ростов н/Д: Ростиздат. 2004, с.224-268.
Донные маяки приемоответчики 24 устанавливаются по трассе прокладки кабеля и являются составной частью подводной системы навигации типа СНП-3, которая также включает приемопередатчики, установленные на подводной лодке 1 и тендере 2. Размещение приемопередатчиков и определение координат места подводной лодки 1 и тендера 2 осуществляется аналогично известным способам и устройствам, приведенным в описаниях к патентам RU №2365939 (Способ навигации подводного объекта) и RU №2371738 (Гидроакустическая навигационная система). Навигация подводной лодки 1 и тендера 2 относительно донных маяков-ответчиков 24 осуществляется как в режиме длиной базой (ДБ), ультракороткой базой (УКБ), так в комбинированном режиме ДБ/УКБ. Подводная лодка 1, тендер 2 оснащаются соответствующими режиму работы гидроакустическими приемо-передающими антеннами, навигационным контроллером и программно-математическим обеспечением.
При навигации подводной лодки 1 и тендера 2 при прокладке кабеля на глубинах более 1 км используются частоты в диапазоне от 8 до 15 кГц, при этом энергетическая дальность связи подводным ориентиром будет достигать 10-14 км, а погрешность определения координат аппарата составит 7-10 м в режиме ДБ и 0,3% от дальности в режиме УКБ и 0,5 град по углу пеленгации. При рабочей глубине менее одного километра целесообразно использовать рабочие частоты в диапазоне 25-35 кГц и работать в режиме УКБ. При этом максимальная дальность связи будет достигать порядка 3 км.
Каждый сигнал подводного приемоответчика имеет специальный формат и кодировку и несет в себе информацию о географических координатах, его индивидуальном номере. Алгоритм работы навигационной системы имеет гибкую структуру и может быть легко адаптирован как под заранее прокладываемый маршрут подводной лодки 1 с тендером 2 по трассе укладки кабеля, так и под определение координат подводной лодки 1 и тендера 2 в любое конкретное время их следования по трассе укладки кабеля в различных гидрологических условиях и условиях гидродинамического шума.
Подводная лодка 1 и тендер 2 фиксируют дистанцию и пеленг до донного маяка приемоответчика (режим УКБ), по которым вычисляют свои точные географические координаты. Наиболее оптимальная дальность связи в режиме УКБ при глубине погружения до 500 метров - 1 км. Точность определения координат до 5 метров.
Устройство для реализации заявляемого способа в части обеспечения позиционирования подводной лодки 1 и тендера 2 представляет собой гидроакустическую навигационную систему с комбинированной системой гидроакустической навигации с длинной и ультракороткой базой, которая позволяет использовать пеленгационную систему решения задачи выхода подводной лодки 1 с тендером 2 в точку установки донного приемоответчика по трассе прокладки кабеля. При этом гидроакустическая антенна донных приемоответчиков, как и подводной лодки 1 и тендера 2, представляет две имеющие общий центр базы из приемников. При этом, если две приемные базы расположены в плоскости, параллельной плоскости палубы, и ортогональны, ось одной базы направлена вдоль осевой линии подводного объекта, а ось другой базы направлена по траверзу вправо.
Две имеющие общий центр базы из приемников позволяют определить направление на источник сигнала как линию пересечения двух конических поверхностей с совпадающими вершинами. Сдвиг фаз Δφ1 электрических сигналов двух точечных приемников (первого второго), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода сигнала соотношением: Δφ1=kcosα, где α - угол прихода сигнала, k - коэффициент, равный k=2πf0 b/с, где b - длина базовой линии, f0 - несущая частота, с - скорость звука в точке приема сигнала. Таким образом α=arccos(Δφ1/k). Сдвиг фаз Δφ2 электрических сигналов двух точечных приемников (третьего и четвертого), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода соотношением Δφ2=kcosβ, β=arccosΔφ2/k. Введя вспомогательные углы φ и ψ, получим, что при известной глубине Н подводного объекта (подводной лодки 1 или тендера 2) выражения для координат подводного объекта Х0, У0 относительно центра базы. При этом плоскость с ординатой Н является третьей поверхностью положения. Очевидно, что
cosψ=D/R, где D - дистанция, R - наклонная дальность, cosψ=x/D,
cosα=x/R(cosΨcosφ)=(Dx)/(RD)=x/R, cosβ=y/R(cosΨcosφ)=(Dy)/(RD)=yR.
При этом cosα=cosΨcosφ, cosβ=cosΨsinφ, X0=Hcosφ/tgΨ,
Y0=Hsinφ/tgΨ. Откуда получаем x0=сНΔφ1/а; у0=сНΔφ2/b.
Так как плоскость палубы практически никогда не совпадает с плоскостью горизонта, то учитываются также влияние углов крена ή и дифферента γ. Дифферент не сказывается на значении у0, а крен на значении х0. Ось X направлена вдоль продольной оси подводного объекта, а ось У направлена по траверзу. Исправленные путем учета крена и дифферента значения координат маяка-ответчика можно записать следующим образом: x1=Нtg[arctg([0/H)+γ], γ1=Нtg[arctg(y0/H)+ή], где γ и ή - положительные значения при опускания носа и правого борта.
В том случае, когда определяется также наклонное расстояние до донного приемоответчика, третьей поверхностью положения является сфера с радиусом, равным наклонному расстоянию, Формулы для вычисления координат упрощаются и имеют вид х0=(сRΔφ12)/α, у0=(cRΔφ32)/β.
Каждая приемная гидроакустическая антенна состоит из четырех гидрофонов. Секция антенны состоит из двух одноканальных и одного двухканального модуля, располагающихся на линейном несущем кронштейне. Расстояние между приемными гидрофонами двухканального модуля составляет 50 мм. Максимальное разнесение крайних приемников на кронштейне составляет 1000 мм. Кронштейн перфорирован, что позволяет располагать приемники в непосредственной близости друг от друга для проведения фазовой калибровки и с произвольным разнесением для проведения измерений направления прихода акустического сигнала. В качестве антенн приемников использованы пьезокерамические сферы диаметром 30 мм, внутри которых размещены предварительные усилители с коэффициентом усиления 30 дБ. Сферы размещаются на стальной пластине размером 145×145×10 мм, снабженной элементами крепления и акустической заглушкой с тыльной стороны. Коэффициент подавления звукового сигнала с тыльной стороны составляет не менее 30 дБ.
Антенный комплекс состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны.
Каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, предназначенный для измерения проекции вектора прихода акустического сигнала на одну из горизонтальный осей в режиме ультракороткой базы, в пеленгационном режиме, либо для приема сигналов в режиме длинной базы на 4 рабочих частотах. Секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу.
Таким образом, когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированного донного маяка приемоответчика 24 в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту, осуществляется режим измерения задержек от нескольких донных маяков приемоответчиков 24 в режиме длинной базы.
В качестве первого и второго спускоподъемных устройств 11 может быть использована, например, морская лебедка типа «Лерок».
В качестве первой и второй положительных плавучестей 12 может быть использован аварийный буй подводной лодки 1, расположенный в носу и в корме подводного объекта. В качестве первой и второй антенн 13 первого и второго приемников 14 спутниковых сигналов может быть использована СНС типа ГЛОНАСС (GPS).
В качестве первой и второй малогабаритных инерциальных навигационных систем 10 может быть использована морская интегрированная малогабаритная система типа «Кама», разработанная Пермской научно-производственной приборостроительной кампанией, или портативная USB с инерциальной навигационной системой INS и приемником GPS.
Первый и второй механизмы 15 ввода соответственно первой и второй антенн 13 в лед 16, включающие выполнение каждой из данных антенн 13 в виде головки, например механического бура, которая закреплена в верхней части выдвижного устройства, представляющего собой полую трубу диаметром 200 мм, внутри которой проложен трубопровод воздуха высокого давления, выдвижное устройство перемещается в вертикальной плоскости и вращается с помощью редуктора от электромотора, который закреплен в определенном месте внутри корпуса положительной плавучести 12. Первый и второй механизмы 15 ввода соответственно первой и второй антенн 13 в лед 16 может включать данные антенны 13 в виде электротермического бура конической формы, установленного на штатном выдвижном устройстве.
Система обработки информации 23 реализована на основе ПЭВМ PC/AT фирмы IBM с соответствующим программным обеспечением, а также на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразование сигналов от всех измерительных устройств, включая штатный гидроакустический лаг 21 (например, типа ЛА-52) и курсоуказатель 22 (магнитный компас), например, на основе микропроцессора семейства A8rR фирмы АТМЕС.
Гидроакустический лаг 21 и курсоуказатель 22 предназначены для плавания по счислению и ввода первоначальных данных о скорости и курсе в приемники 14 спутниковых сигналов и малогабаритные ИНС 10.
Технический результат предлагаемого способа прокладки морских подводных кабелей состоит в устранении влияния внешних условий, льда, волнений на море и в обеспечении возможности прокладки морских кабелей в любых районах Земного шара.
Изобретение относится к технике электрической связи, в частности к способам прокладки морского кабеля связи, и может найти применение при прокладке кабелей в условиях, где другие способы прокладки использовать нельзя, например для прокладки кабелей и трубопроводов для транспортировки углеводородов в условиях Арктики и Антарктики, а также при исследование рельефа дна океана, включая определение внешней границы континентального шельфа Арктических морей.
Основные элементы и узлы устройства, а также гидроакустические средства измерения, средства реализации программного обеспечения реализованы на промышленно выпускаемых изделиях, что практически исключает технические риски при реализации заявляемого технического решения.
Источники информации
1. Каганович А.А.. Хайзерур Е.М. Судна для прокладки подводных кабелей связи. Л.: Судостроение, 1998.
2. Патент FR №2253881, 1974.
3. Патент FR №2415381.
4. Заявка Японии N56-39125, 1981.
5. Патент RU №2069932.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
Изобретение относится к технике электрической связи и может найти применение при прокладке каблей в условиях Арктики и Антарктики. Сущность изобретения заключается в том, что прокладку кабеля производят с помощью транспортного и транспортируемого судов, в качестве которых используется подводная лодка и связанный с ней тендер, снабженный кабельным отсеком с автоматической системой управления, спуском кабеля и укладкой его на дно, обитаемым отсеком для сращивания и контроля кабеля и автоматическим устройством для поддержания тендера на заданном расстоянии от дна, путем заполнения кабельного отсека водой по мере расхода кабеля, при этом прокладка кабеля производится без всплытия подводной лодки на поверхность. При этом выполняют нейтрализацию отрицательного давления под днищем тендера путем аэрации потока воды под тендером в зоне отрицательных давлений и выполняют позиционирование тендера относительно трассы укладки кабеля посредством системы подводной навигации и судового модуля навигации и позиционирования транспортным судном кабелеукладчика, включающего, по крайней мере, две малогабаритные ИНС, гидроакустические средства измерения глубины и скорости и спутниковую навигационную систему и курсоуказатель, информационно соединенные с системой обработки регистрируемой информации. Технический результат от предлагаемого способа прокладки морских подводных кабелей состоит в устранении влияния внешних условий, льда, волнений на море и в обеспечении возможности прокладки морских кабелей в любых районах Земного шара. 2 н.п. ф-лы, 1 ил.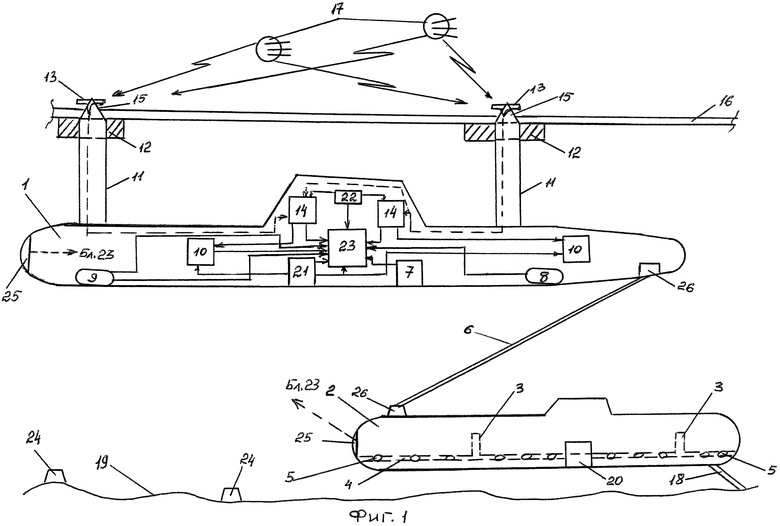
1. Способ прокладки морских подводных кабелей, при котором прокладку кабеля на дно осуществляют с буксируемого транспортным судном кабелеукладчика, находящегося в подводном состоянии и имеющего средства для размещения запаса кабеля, и автоматическую систему управления спуском кабеля и укладки его на дно, в качестве транспортирующего судна используют подводную лодку, а в качестве буксируемого кабелеукладчика тендер, снабженный кабельным отсеком, обитаемым отсеком для сращивания и контроля кабеля, при этом прокладку осуществляют при подводном положении лодки, а тендер в процессе прокладки поддерживают на заданном расстоянии от дна путем заполнения кабельного отсека водой по мере расхода кабеля с помощью автоматического устройства, отличающийся тем, что дополнительно выполняют нейтрализацию отрицательного давления под днищем тендера путем аэрации потока воды под тендером в зоне отрицательных давлений и выполняют позиционирование тендера относительно трассы укладки кабеля посредством системы подводной навигации и судового модуля навигации и позиционирования транспортным судном кабелеукладчика, включающего, по крайней мере, две малогабаритные ИНС, гидроакустические средства измерения глубины и скорости, и спутниковую навигационную систему курсоуказатель, информационно соединенные с системой обработки регистрируемой информации.
2. Устройство для прокладки морских подводных кабелей, включающее транспортирующее судно, выполненное в виде подводной лодки, буксируемый кабелеукладчик, выполненный в виде тендера с кабельным отсеком, отличающееся тем, что шпангоуты тендера выполнены в виде трубчатого шпангоута-аэратора, ниже плоскости плавания тендера расположены бортовые трубы, снабженные отверстиями-шпигатами, бортовые трубы сочленены с трубчатыми шпангоутами аэраторами, на транспортирующем судне дополнительно установлены многолучевой эхолот, гидроакустический параметрический профилограф, гидролокатор, две малогабаритные ИНС, первый и второй спускоподъемные устройства соответственно с первой и второй положительными плавучестями, внутри которых установлены соответственно первая и вторая антенны соответствующих приемников спутниковой навигационной системы, механизмы ввода антенн спутниковой навигационной системы в лед, на тендере установлен однолучевой эхолот.
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 1994 |
|
RU2069932C1 |
| Способ укладки кабеля ниже уровня дна водоема | 1984 |
|
SU1259380A1 |
| Устройство для сопряжения эвм с абонентами | 1984 |
|
SU1215114A1 |
| Ориентатор стеклоизделий | 1982 |
|
SU1046204A1 |
| Прибор для закрытой калоризации уха | 1956 |
|
SU105504A1 |

