Изобретение относится к нашлемным системам целеуказания и индикации и предназначено для работы во всех режимах боевого применения пилотов днем и ночью, обеспечивает решение следующих основных задач:
- определения и выдачи угловых координат линии визирования (ЛВ) относительно строительной оси носителя;
- формирования и отображения в поле зрения летчика коллимированного изображения прицельной и символьной информации.
Нашлемные системы целеуказания и индикации (НСЦИ) находят широкое применение в авиации. Они выполняют ту же роль, что и индикатор на лобовом стекле (ИЛС) - позволяют пилоту осуществлять контроль полета и прицеливание, не опуская взгляд на индикаторы в кабине, т.е. не отвлекаясь от окружающей обстановки. Это необходимо в условиях боевых действий и на напряженных фазах полета, но, в отличие от ИЛС, при помощи НСЦИ появляется возможность брать на прицел цели, находящиеся в стороне от строительной оси самолета.
В ряде применяемых за рубежом НСЦИ, на полупрозрачном экране, находящемся перед глазами пилота, помимо изображения прицельной метки проецируется также навигационно-пилотажная информация, например, скорость полета, высота, наличие целей.
В отечественных системах «Щель» и «Сура», внедренных на истребителях СУ-27, МиГ-29 и их последующих модификациях, на защитном шлеме крепится визирно-реперное устройство, которое проецирует изображение прицела на небольшой плоский мениск перед глазом пилота. Вследствие малости угла поля зрения в данных системах реализовано проецирование изображения только прицельной метки, кроме того, держатель мениска затеняет обозреваемое пространство.
Из уровня техники известен патент US 2013057852 для подсветки используется узкий коллимированный пучок света, что ограничивает перемещение шлема диаметром пучка, и соответственно, диаметром выходной линзы камеры. В связи с этим в патенте предложена схема сканирования пучком света с использованием матричного источника света (пункты 0068, 0069, фиг. 7 патента). Эта схема влечет за собой существенное усложнение и удорожание камеры, а главное, снижение скорости измерения в N раз, где N - количество источников в матричном излучателе. В предложенной нами системе обзор всего пространства возможных положений шлема происходит за один снятый камерой кадр.
Известен патент US 2014362386, где используется безлинзовая бесфокусировочная оптическая схема.
Таким образом, любая сильная световая помеха (например, солнце), попадающая в поле зрения камеры, засвечивает всю поверхность светочувствительной матрицы, что делает невозможным определение координат шлема.
В представленной нами системе используется классическая схема с объективом. В такой схеме любая яркая помеха выглядит как световое пятно ограниченных размеров на изображении, которое не может перекрыть полезный сигнал от отражающих элементов, т.к. поверхность шлема, на которой они нанесены, загораживает помеху от камеры в окрестности меток.
Камеры, используемые в патентах US 2013057852 и US 2014362386, имеют достаточно сложную оптическую схему: либо полупрозрачное зеркало, либо экран. Это увеличивает габариты, стоимость, и снижает надежность камеры.
В камерах заявленной нами системы используется простейшая схема матрица-объектив, диоды подсветки расположены по кругу объектива, и к ним не предъявляется никаких требований поточности расположения относительно матрицы или объектива.
Наиболее близким аналогом является нашлемная система индикации и распознавания объектов IS-1200+HObIT [http://www.intersense.com/pages/66/240; http://www.intersense.com/uploads/documents/IS-1200+_HObIT_Datasheet.pdf], опубл.: 27.01.2017.
Данная система имеет принципиально иное расположение меток и камеры, в сравнении с заявленным изобретением. В известном решении метки расположены на защитном остеклении, а камера на защитном шлеме. Таким образом, система имеет недостаток - связана с остеклением самолета.
Технической проблемой прототипа и иных известных решений является использование сложных меток, что усложняет распознавание меток на больших дистанциях удаления камеры от метки.
Также, технической проблемой прототипа и иных известных решений являются стеклянные призмы, которые имеют принципиальные недостатки: сложность изготовления, высокая стоимость, хрупкость, большие объемные размеры, которые увеличивают габариты защитного шлема.
Задачей изобретения является устранение вышеуказанных недостатков известных решений.
Техническим результатом изобретения является:
- использование более простых меток, что обеспечивает надежное распознавание меток на больших дистанциях удаления камеры от метки;
- использование пассивных отражателей, которые могут быть нанесены на любой объект без особых требований к его размеру и форме;
- отсутствие потребности работы с защитным остеклением самолета;
- исключение перекрытия полезного сигнала от отражающих элементов;
- отсутствие требований по точности расположения относительно матрицы или объектива;
- обзор всего пространства возможных положений шлема происходит за один снятый камерой кадр.
Указанный технический результат достигается за счет того, что заявлена нашлемная система целеуказания и индикации, содержащая систему меток, нашлемное визирное устройство, соединенное с блоком управления формированием индикации и обработки информации, связанный с камерой наблюдения, имеющей жесткую фиксацию, отличающаяся тем, что используется не менее четырех пассивных светоотражающих меток разной формы и геометрии, которые закреплены на нашлемном визирном устройстве и расположены в разных плоскостях так, что под любым углом в пределах поворота шлема на 120 градусов в горизонтальной плоскости, никогда более двух меток не лежит на одной прямой; каждая метка имеет уникальный рисунок и/или символ.
Предпочтительно, внутренний рисунок метки состоит из трех областей: область внешней границы - контур метки; область данных, поделенная на 8 секторов по 45° каждый; центральная область - центр метки.
Нашлемное визирное устройство состоит из проекционного дисплея, объектива проекционной системы, отражателя - «монокль», модуля индикации, модуля датчика освещенности.
Предпочтительно, помимо жестко зафиксированной камеры наблюдения в состав системы входят дополнительно две камеры, выполняющие функцию пеленгаторов положения меток, расположенных на нашлемном визирном устройстве, используемых для работы системы позиционирования.
Предпочтительно, камеры наблюдения выполнены с возможностью формирования видеоизображения меток, расположенных на нашлемном визирном устройстве в спектральном диапазоне (950±10) нм и передачи его в блок управления формированием индикации и обработки информации для дальнейшей обработки.
Предпочтительно, каждая камера наблюдения включает в себя следующие основные узлы: модуль камеры, с установленным матричным фотоприемным устройством; объектив; светофильтр; модуль подсветки светодиодный.
Метки выполнены из материала, поверхность которого состоит из стеклянных микросфер с высоким коэффициентом отражения.
Способ определения углового положения линии визирования с помощью вышеуказанной нашлемной системы целеуказания и индикации характеризуется тем, что метки подсвечивают в спектральном диапазоне, невидимом человеческому глазу (950 нм); подсветку осуществляют при помощи матрицы светодиодов, расположенной на камере наблюдения; рассеянное, невидимое для человеческого глаза излучение от матрицы светодиодов после попадания на метки-отражатели, засвечивает их, а с помощью камер наблюдения формируют видеопоток, отдельные кадры которого представляют собой изображение совокупности меток на нашлемном визирном устройстве; с помощью блока управления формированием индикации и обработки информации осуществляют измерение углового положения линии визирования (ЛВ) в разных диапазонах; измеряют угловое положение ЛВ при линейном перемещении шлема в трехмерной системе координат при отклонении шлема до ±200 мм от основного рабочего состояния; вычисляют максимальную погрешность определения углового положения ЛВ; для определения угловых координат линии визирования применяют оптический способ измерений, основанный на использовании опорных маркерных меток, которые устанавливают на нашлемном визирном устройстве; на основе входных данных: кадры камер наблюдения, ЗД модель расположения меток на нашлемном визирном устройстве и шлеме; определяют положение ЛВ, получая 6 чисел, описывающих линейное и угловое положение линии визирования. Подсветку осуществляют в импульсном режиме.
Для подавления засветок и бликов, в датчиках камер наблюдения используют спектральную фильтрацию в диапазоне (950±10) нм.
Использование более простых меток обеспечивает надежное распознавание меток на больших дистанциях удаления камеры от метки.
Пассивные отражатели, используемые в заявленной системе, представляют собой тонкие плоские световозвращающие пленки, которые могут быть нанесены на любой объект без особых требований к его размеру и форме.
Заявленная система не предполагает какие-либо работы с защитным остеклением самолета, т.к. метки расположены на нашлемном устройстве, а камеры устанавливаются на дуге фонаря кабины таким образом, чтобы не мешать летчику при работе и аварийном покидании кабины.
В представленной системе используется классическая схема с объективом. В такой схеме любая яркая помеха выглядит как световое пятно ограниченных размеров на изображении, которое не может перекрыть полезный сигнал от отражающих элементов, т.к. поверхность шлема, на которой они нанесены, загораживает помеху от камеры в окрестности меток.
В камерах заявленной нами системы используется простейшая схема матрица-объектив, диоды подсветки расположены по кругу объектива, и к ним не предъявляется никаких требований поточности расположения относительно матрицы или объектива. В заявленной системе обзор всего пространства возможных положений шлема происходит за один снятый камерой кадр.
Краткое описание чертежей
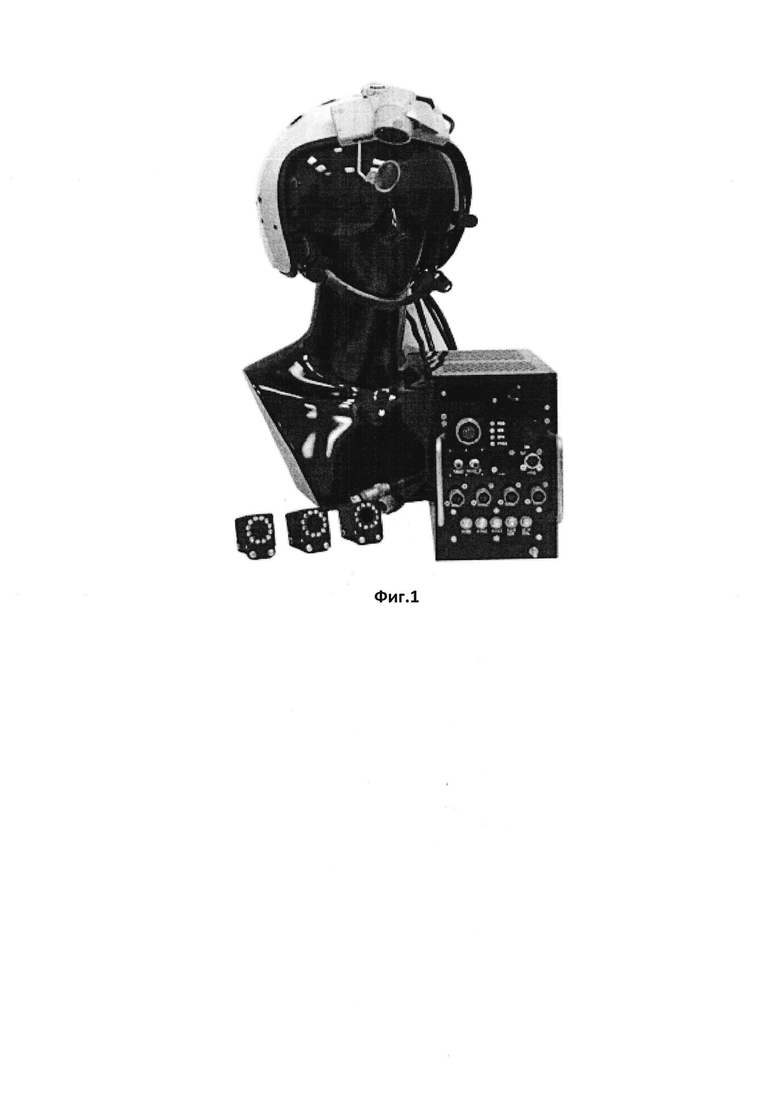
На Фиг. 1 показан внешний вид рабочей модели НСЦИ, созданной заявителем, где показано, как нашлемное визирное устройство (НВУ) установлено на защитный шлем ЗШ-7АПН (защитный шлем не входит в комплект системы).
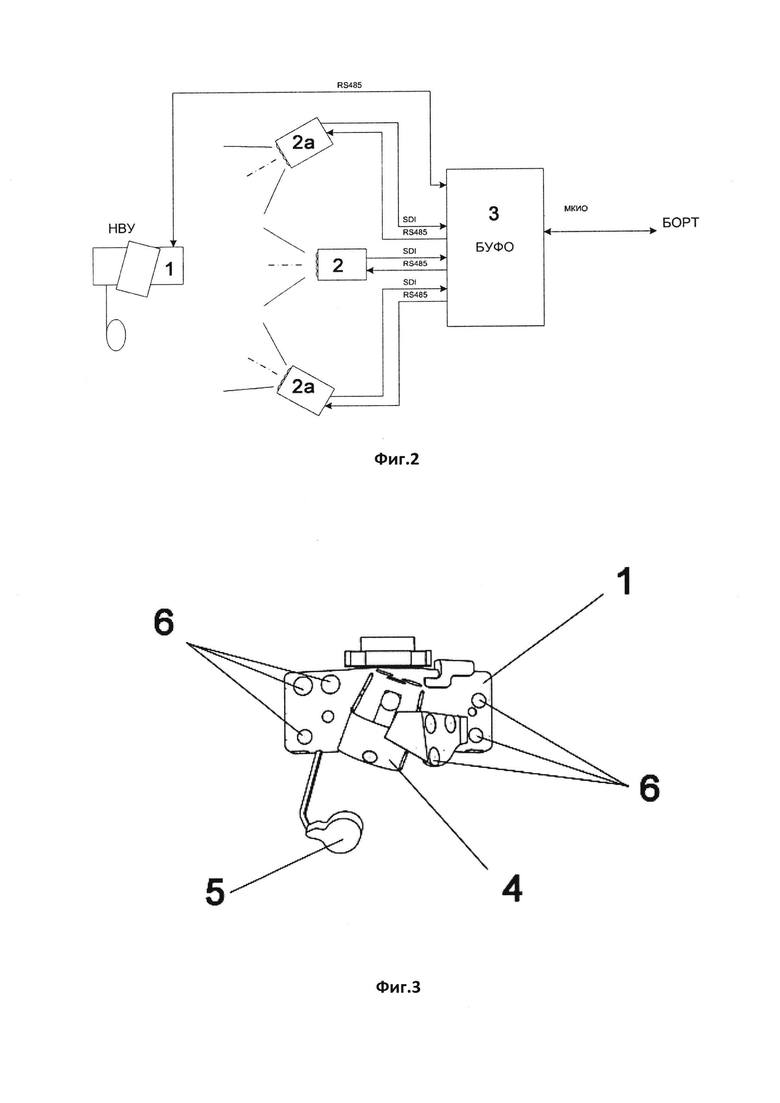
На Фиг. 2 показана структурная схема нашлемной системы целеуказания и индикации.
На Фиг. 3 показан внешний вид НВУ в рабочем положении отражателя.
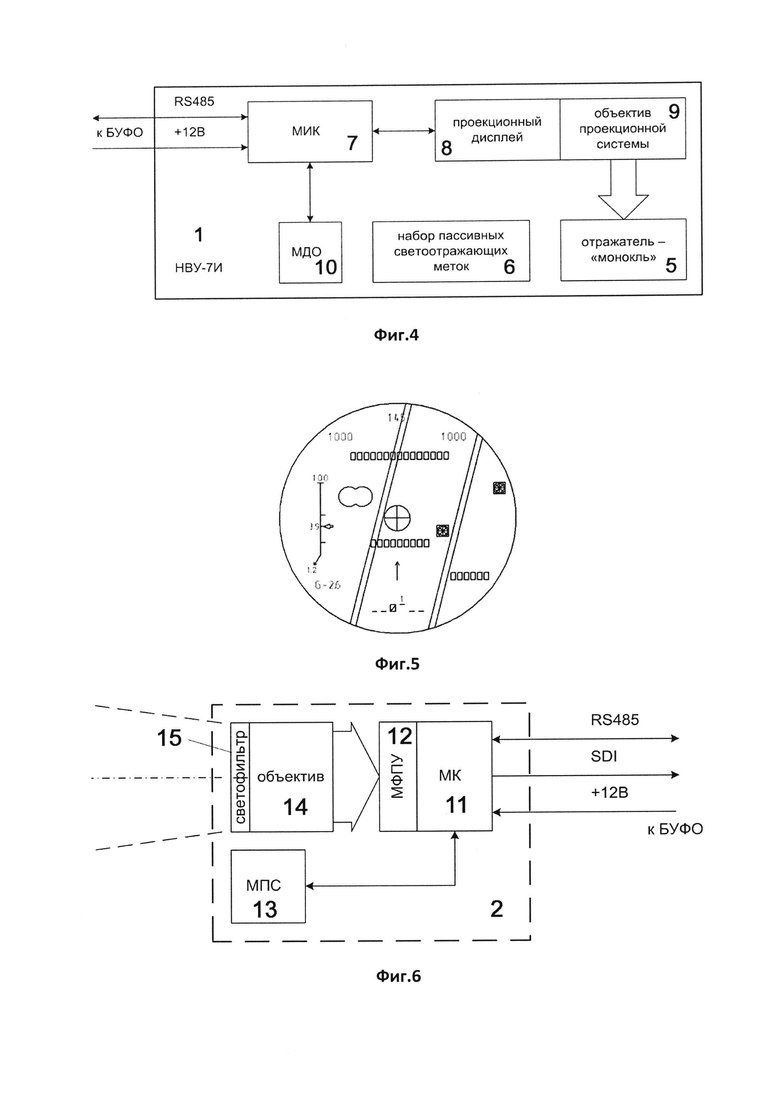
На Фиг. 4 показана структурная схема НВУ.
На Фиг. 5 показан пример отображаемой информации (полная роспись - имитация).
На Фиг. 6 показана структурная схема камеры наблюдения.
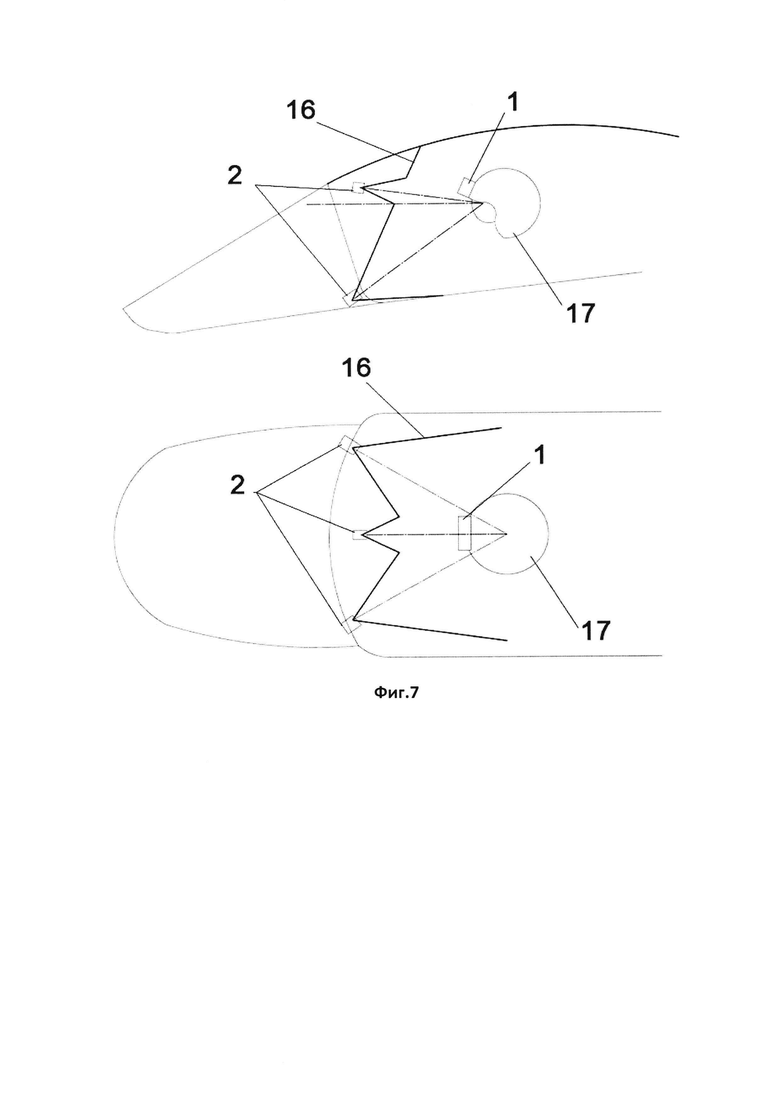
На Фиг. 7 показаны примеры размещения камер наблюдения в кабине пилота.
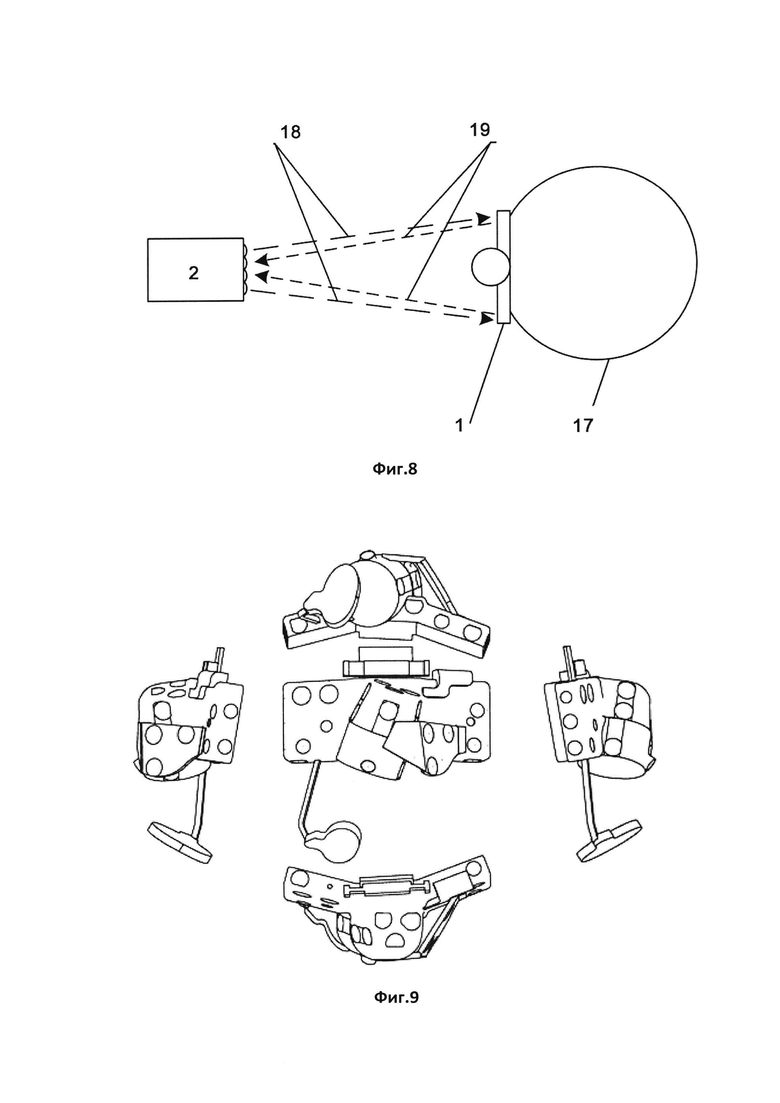
На Фиг. 8 показано рассеянное, невидимое для человеческого глаза излучение от матрицы светодиодов, которое попадает на метки-отражатели, засвечивая их.
На Фиг. 9 показан пример расположения меток на НВУ.
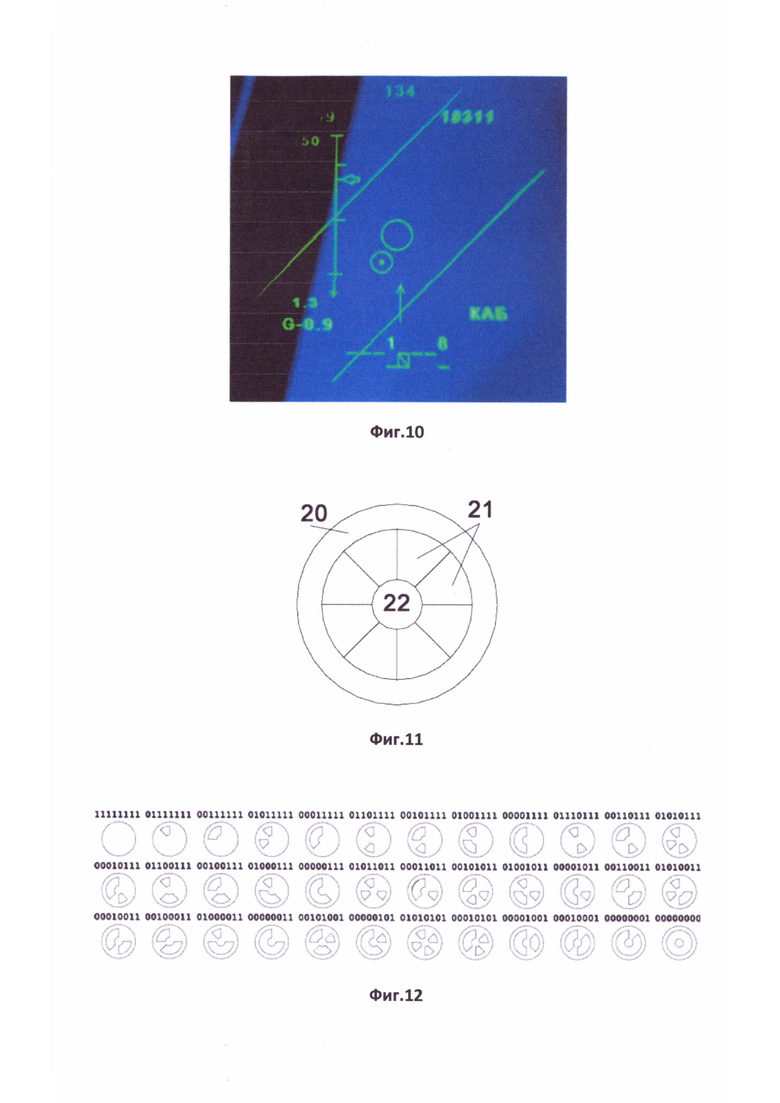
На Фиг. 10 показан пример отображаемой графической информации через визир НВУ (частичная роспись на фоне неба).
На Фиг. 11 показан пример внутреннего рисунка метки, состоящей из трех областей.
На Фиг. 12 показан пример набора последовательностей для набора меток.
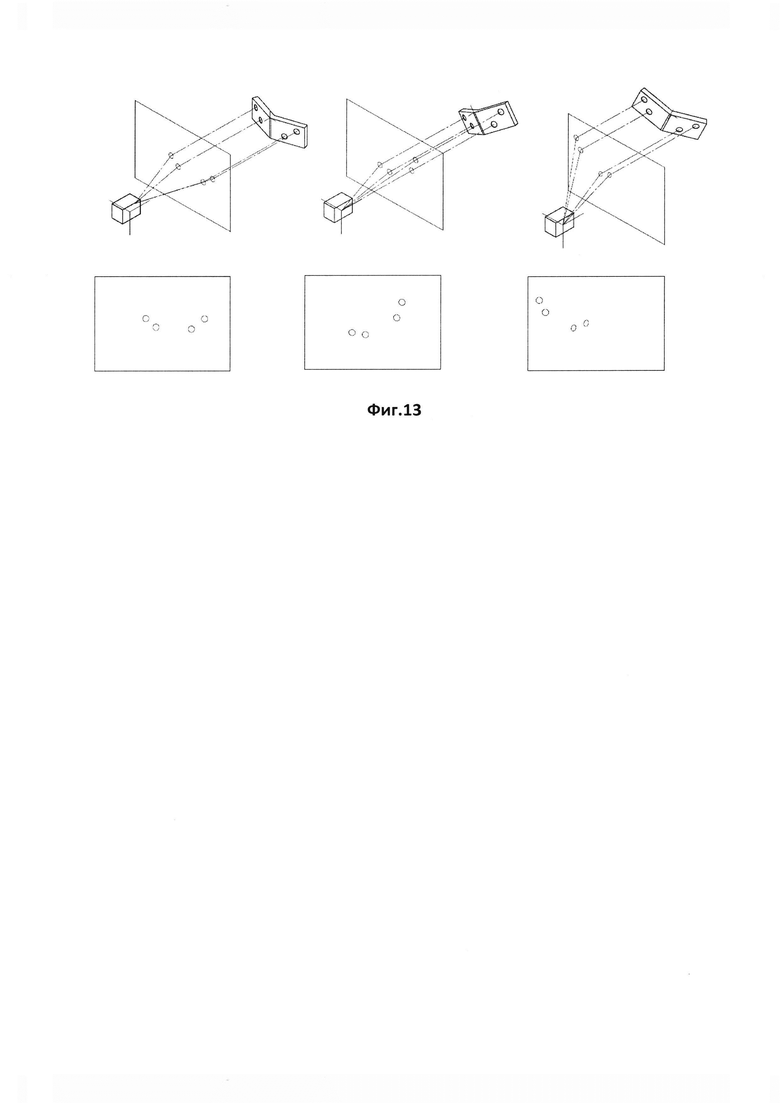
На Фиг. 13 показано как меняется пространственное положение меток в плоскости в зависимости от поворота шлема.
На чертежах: 1 - нашлемное визирное устройство, 2 - камера наблюдения основная, га-камера наблюдения дополнительная, 3 - блок управления формированием индикации и обработки информации, 4 - проекционный модуль, 5 - отражатель - "монокль", 6 - светоотражающие метки, 7 - модуль индикации (МИК), 8 - проекционный дисплей, 9 - объектив проекционной системы, 10 - модуль датчика освещенности (МДО), 11 - модуль камеры (МК), 12 - матричное фотоприемное устройство (МФПУ), 13 - модуль подсветки светодиодный (МПС), 14 - объектив камеры, 15 - светофильтр, 16 - зона обзора камер, 17 - шлем, 18 - падающее рассеянное излучение 950 нм, 19 - отраженное излучение от меток, 20 -область внешней границы, 21 - область данных (внутреннее кольцо, поделенное на 8 секторов по 45° каждый); 22 - центральная область.
Осуществление изобретения
Заявленная нашлемная система целеуказания и индикации (НСЦИ) предназначена для:
- определения и выдачи угловых координат линии визирования (ЛВ) по угловому положению базового защитного шлема относительно строительной оси носителя с учетом линейного его положения;
- формирования и отображения в поле зрения летчика коллимированного изображения прицельной и символьной информации;
- сопряжения с защитным шлемом, при этом установка производится с использованием кронштейна.
НСЦИ обеспечивает:
- целеуказание, прицеливание и индикацию бортовой символьной информации, гармонизированной с символьной информацией ИКШ, необходимой летчику;
- определение и выдачу угловых координат ЛВ по угловому положению базового защитного шлема относительно осей носителя с учетом линейного положения базового защитного шлема в следующих диапазонах:
- измерение и выдачу в прицельно-навигационный комплекс (ПрНК) носителя углового положения ЛВ при линейном перемещении головы летчика по осям X, Y и Z самолета до ±200 мм от равновесного (основного) рабочего положения;
- формирование в поле зрения правого глаза летчика коллимированного изображения знакографической прицельно-навигационной информации, состоящей из стационарных символов с постоянными координатами и подвижных символов с переменными координатами.
- сопряжение с внешними системами по одному мультиплексному каналу информационного обмена (МКИО) в соответствии с ГОСТ Р 52070 в режиме оконечного устройства (ОУ).
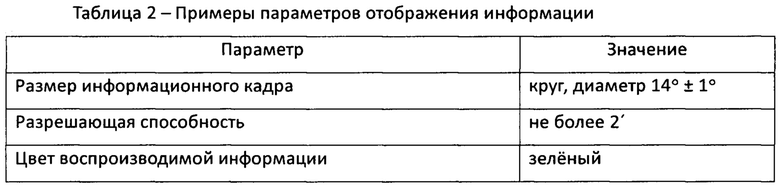
Параметры отображения информации могут быть на примере таких, которые приведены в таблице 2.
Внешний вид рабочей модели НСЦИ, созданной заявителем, приведен на Фиг. 1, где показано, как нашлемное визирное устройство (НВУ) установлено на защитный шлем ЗШ-7АПН (защитный шлем не входит в комплект системы).
Структурная схема нашлемной системы целеуказания и индикации приведена на Фиг. 2.
Внешний вид НВУ в рабочем положении отражателя показан на Фиг. 3.
НВУ 1 включает в себя следующие основные функциональные узлы:
а) проекционный модуль 4, состоящий из проекционного дисплея и объектива проекционной системы;
б) отражатель - «монокль» 5;
в) модуль индикации (МИК) 7;
г) модуль датчика освещенности (МДО) 10;
д) набор пассивных светоотражающих меток 6 (для системы позиционирования).
Структурная схема НВУ приведена на Фиг. 4.
Пример отображаемой информации приведен на Фиг. 5.
НВУ обеспечивает выполнение следующих тактико-технических характеристик НСЦИ:
а) формирование в поле зрения правого глаза летчика коллимированного изображения цифровой, буквенной и символьной информации, состоящей из стационарных и подвижных символов;
б) обеспечение уверенного считывания изображений при различной внешней освещенности, в условиях полета днем и ночью как на фоне закабинного пространства, так и на фоне кабины;
в) обеспечение ручной регулировки яркости изображения;
г) адаптивное изменение яркости индикации в зависимости от внешней освещенности в кабине;
д) установка НВУ на шлеме ЗШ-7АПН производится на стандартном кронштейне НВУ.
В состав НСЦИ входит как минимум одна камера 2, но лучше не менее чем три камеры (одна основная - камера 2, и дополнительные камеры 2а), выполняющие функцию пеленгаторов положения меток 6, расположенных на НВУ, необходимых для работы системы позиционирования.
Камеры 2, 2а предназначены для формирования видеоизображения меток, расположенных на НВУ 1 в спектральном диапазоне (950±10) нм и передачи его в блок управления формированием индикации и обработки информации (БУФО) 3 для дальнейшей обработки.
Каждая камера 2, 2а включает в себя следующие основные узлы:
а) модуль камеры 11, с установленным матричным фотоприемным устройством (МФПУ) 12;
б) объектив 14;
в) светофильтр 15;
г) модуль подсветки светодиодный 13.
Структурная схема камеры наблюдения приведена на Фиг. 6.
Камеры обеспечивают выполнение следующих тактико-технических характеристик НСЦИ:
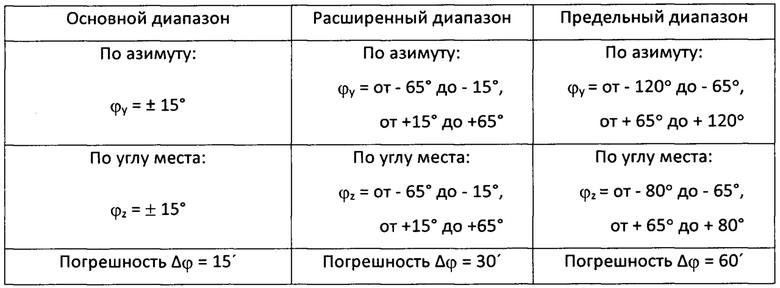
а) измерение углового положения ЛВ в трех диапазонах: основном (ϕу=±15°, (ϕz=±15°), расширенном (ϕу=от -65° до -15°, от +15° до +65°, ϕz=от -65° до -15°, от +15° до +65°,) и предельном (ϕу=от -120° до -65°, от +65° до +120°, (ϕz=от -80° до -65°, от +65° до +80°);
б) измерение углового положения ЛВ при линейном перемещении головы летчика по осям X, Y, Z ССК самолета до ±200 мм от основного рабочего состояния.
Блок управления формированием индикации и обработки информации (БУФО).
БУФО 3 предназначен для управления и обработки информации, поступающей от камер и НВУ 1, а также для обеспечения информационного обмена с прицельно-навигационным комплексом (ПрНК).
БУФО 3 обеспечивает выполнение следующих тактико-технических характеристик НСЦИ:
а) измерение углового положения ЛВ в трех диапазонах: основном (ϕу=±15°, ϕz=±15°), расширенном (ϕу=от -65° до -15°, от +15° до +65°, (ϕz=от -65° до -15°, от +15° до +65°,) и предельном (ϕу=от -120° до -65°, от +65° до +120°, ϕz=от -80° до -65°, от +65° до +80°);
б) измерение углового положения ЛВ при линейном перемещении головы летчика по осям X, Y, Z самолета до ±200 мм от основного рабочего состояния;
в) максимальная погрешность определения углового положения ЛВ: не более 15' в зоне основного диапазона, не более 30' в зоне расширенного диапазона и не более 60' в зоне предельного диапазона;
г) прорабатывается максимальная погрешность определения углового положения ЛВ не более 5' в основном диапазоне (ϕу=±15°, ϕz=±15°);
д) НСЦИ имеет внешний технологический интерфейс для загрузки программного обеспечения через технологический разъем БУФО без его вскрытия;
е) НСЦИ получает электропитание от сети переменного трехфазного тока номинальным напряжением 115 В, частотой 400 Гц, и является потребителем второй категории в соответствии с требованиями ГОСТ Р 54073, приложение Б;
ж) НСЦИ обеспечивает сопряжение с внешними системами по одному мультиплексному каналу информационного обмена (МКИО) в соответствии с ГОСТ Р 52070 в режиме оконечного устройства (ОУ). Принцип работы НСЦИ
НСЦИ функционально состоит из двух подсистем: системы индикации и системы позиционирования. Системы интегрированы друг в друга, поэтому работоспособность НСЦИ зависит от исправности обоих систем.
Система индикации реализована в блоках НВУ и БУФО. Система представляет собой оптико-электронную систему, обеспечивающую формирование коллимированного изображения пилотажной прицельной и навигационной информации в поле зрения правого глаза летчика.
Система позиционирования реализована в блоках камер наблюдения, НВУ и БУФО. Система предназначена для определения и выдачи угловых координат линии визирования по угловому положению защитного шлема. Камеры наблюдения устанавливаются на дуге фонаря кабины самолета для слежения за перемещением головы пилота. На корпусе НВУ расположен набор пассивных светоотражающих меток.
Для определения угловых координат линии визирования применяется оптический способ измерений. В отличие от электромагнитной системы позиционирования, оптическая система не чувствительна к изменению электромагнитной обстановки внутри кабины (появлению в области чувствительности датчика предметов из магнитных материалов, включению/выключению генераторов магнитного поля и т.д.).
В программном обеспечении БУФО реализован алгоритм определения положения ЛВ. Входные данные для алгоритма: кадры камер наблюдения, ЗД модель расположения меток на НВУ и шлеме ЗШ-7АПН. Выходные данные алгоритма: 6 чисел, описывающих линейное и угловое положение линии визирования. Выходные данные поступают в бортовое радиоэлектронное оборудование (БРЭО) по мультиплексному каналу информационного обмена (МКИО). Система позиционирования
Камеры наблюдения устанавливаются на дуге фонаря кабины при помощи специальных кронштейнов, обеспечивающих механическую прочность конструкции и необходимое направление оптических осей камер.
Расположение камер выбрано таким образом, что при всех возможных перемещениях головы пилота в кабине четко просматриваются ориентиры (пассивные светоотражающие метки), необходимые для вычисления требуемых значений углов ЛВ. Пассивные метки 6 располагаются на корпусе НВУ 1 и защитном шлеме ЗШ-7АПН -17.
Примеры размещения камер наблюдения в кабине показаны на Фиг. 7, где видны зоны 16 обзора камер и их удаление от шлема 17 пилота. Принцип работы системы позиционирования
Система позиционирования является оптической, основанной на использовании опорных маркерных меток на корпусе НВУ.
Маркерные метки являются пассивными светоотражателями, разной формы и геометрии. Метки подсвечиваются в спектральном диапазоне, невидимом человеческому глазу (950 нм). Подсветка осуществляется при помощи матрицы светодиодов, расположенной на камере. Рассеянное, невидимое для человеческого глаза излучение 18 от матрицы светодиодов попадает на метки-отражатели, засвечивая их отраженным потоком 19 (Фиг. 8). Камеры наблюдения формируют видеопоток, отдельные кадры которого представляют собой изображение совокупности меток НВУ.
Подсветка работает в импульсном режиме, благодаря чему происходит фильтрация полезного оптического сигнала от паразитных засветок и бликов. Также, для подавления засветок и бликов, в датчиках камер наблюдения используется спектральная фильтрация, обеспечивающая работу системы в спектральном диапазоне (950±10) нм. Пример расположения меток на НВУ приведен на Фиг. 9.
Система индикации
Система индикации является составной частью блока НВУ и представляет собой оптико-электронную проекционную систему, формирующую коллимированное изображение пилотажной прицельной и навигационной информации. Основные элементы системы:
- проекционный дисплей;
- объектив проекционной системы;
- отражатель - «монокль».
Пример отображаемой графической информации через визир НВУ показан на Фиг. 10.
В технике известны различные типы проекционных систем для передачи изображения дисплея, которые могли бы использоваться для цели индикации. Для нашлемных систем, в которых формируется прицельная метка, пригодны только системы с установкой изображения на бесконечности. В таком случае, дисплей должен находиться в фокусе проекционной системы, тогда от точки на дисплее в глаз будет падать параллельный пучок света, который сфокусируется на сетчатке.
Проекционная система может состоять из одного объектива, а может формировать промежуточное изображение для виртуального увеличения размеров дисплея. В этом случае выходная часть проекционной системы является окуляром, а глаз должен располагаться в выходном зрачке. Для меньшей точности позиционирования глаза необходим достаточно большой размер выходного зрачка (5-10 мм).
Другая важная особенность проекционной системы заключается в наличии делителя света (комбайнера), на котором происходит наложение потоков излучения от дисплея и из пространства перед глазами пилота. Выходной зрачок должен быть вынесен настолько далеко, чтобы имелась возможность разместить остальные элементы оптической системы, расположенные со стороны дисплея, так, чтобы они не заслоняли обозреваемое пилотом пространство. Комбайнер может быть плоским светоделительным зеркалом или иметь форму с оптической силой.
В НВУ реализована оптическая система, включающая плоский комбайнер и объектив на оси оптической системы в компоновке с выкидным отражателем - «моноклем». Преимущество такого подхода заключается в том, что при тех же габаритах и массе, что и в визирных устройствах применяемых на данный момент в войсках, достигается более широкое поле с возможностью вывода полной информации, дублирующей все данные на ИЛС.
Из-за расположения НВУ на защитном шлеме, вблизи лица пилота, при проектировании блока особое внимание уделено минимизации веса и продольной длины объектива (для уменьшения общего габаритного размера).
В процессе работы с НСЦИ пользователь, перемещая голову в пространстве, наблюдает изменение символики в зависимости от направления своего взгляда, положения головы, а также от различной дополнительной информации предоставляемой носителем. При этом всю символику можно условно разделить на подвижную и неподвижную. Неподвижная часть по своему функциональному предназначению не передвигается по изображению (отображается в фиксированном месте), в отличие от подвижной, которая в зависимости от текущего направления взгляда пользователя двигается по изображению. Символика связывает поле зрения пользователя с информационным полем носителя.
Новизной заявленного изобретения является то, что на корпусе НВУ установлены специальные опорные метки из световозвращающего материала.
Метки могут быть выполнены из материала, поверхность которого состоит из стеклянных микросфер с высоким коэффициентом отражения. Такой материал, за счет своей конструкции отражает падающий свет в обратном направлении (с минимальным рассеиванием). Это свойство обеспечивает равномерный отраженный сигнал на изображении каждой камерой наблюдения при попадании света ИК подсветки на плоскость опорной метки под углами обзора от 0° до 75-85° в зависимости от расстояния от выхода объектива камеры до плоскости метки. Иными словами, изображение опорной метки (отражение сигнала ИК подсветки) попадает в кадр видеопотока, получаемого датчиком камеры наблюдения.
Опорные метки могут иметь, например, круглую форму, фиксированный размер и специальный внутренний рисунок (далее, код метки), однозначно идентифицирующий каждую из них. Размер и расположение опорных меток на НВУ определяется формой и габаритными размерами самого НВУ, оптическими характеристиками датчиков камеры наблюдения (размер и разрешающая способность матрицы, углы поля зрения и фокусное расстояние объектива, яркость и угловое поле ИК подсветки и др.) и их взаимным расположением на носителе.
Расположение опорных меток на корпусе НВУ задается 3D моделью НВУ. Каждая метка внутри модели задается уникальным порядковым номером в модели, идентификатором кода метки (однозначно задается внутренним рисунком), диаметром в мм, XYZ координатами центра в мм и вектором нормали к плоскости метки. В случае, если метка с заданным идентификатором кода установлена на НВУ в единственном числе (нет повтора), то после распознавания кода можно однозначно определить соответствие между 2D координатами центра изображения метки и координатами метки в 3D модели НВУ.
Определить положение и ориентацию НВУ в пространстве возможно при наличии минимум 4-х соответствий между центрами меток на изображении с камеры наблюдения (2D) и центрами соответствующих меток в модели НВУ (3D).
Данное условие требует использования минимум 4 меток.
При этом если по изображению с камеры наблюдения получено менее 6 соответствий 2D-3D, то на возможность успешного определения положения и ориентации НВУ накладываются определенные ограничения.
Круглая форма метки в проекции на плоскость изображения под любым углом обзора даст контур в виде эллипса, определив параметры которого (центр и оси эллипса), зная реальные размеры метки и расположение в модели НВУ, можно получить интерполированное изображение метки, сохраняя относительные размеры деталей внутреннего рисунка. Получив такое изображение метки, и зная геометрические параметры внутреннего рисунка, можно распознать данные, закодированные в нем (код метки). Однако, есть ограничения.
Какие бы не использовались пассивные светоотражающие метки разной формы и геометрии, их должно быть минимум четыре и они должны быть закреплены на нашлемном визирном устройстве и расположены в разных плоскостях так, что под любым углом в пределах поворота шлема на 120 градусов в горизонтальной плоскости, никогда более двух меток не лежит на одной прямой.
Только при таком условии при любых возможных ситуациях удается идентифицировать каждую метку как уникальную и не возникает неоднозначности.
Каждая метка имеет уникальный рисунок и/или символ, при этом под любым углом зрения по отношению к любой метке, сканированное изображение каждой метки распознается как уникальное.
Внутренний рисунок метки состоит из трех областей (Фиг. 11): область внешней границы 20 (внешнее сплошное кольцо - задает контур метки); область данных 21 (внутреннее кольцо, поделенное на 8 секторов по 45° каждый - задает 8 бит данных для номера метки); центральная область 22 (центральный сплошной круг - задает центр метки).
Область внешней границы вместе с центральной областью являются опорными для отделения метки от внешнего шума. Если среднее значение яркости пикселей по этим областям меньше заданного порога, то изображение считается шумом и отбрасывается. Сектора области данных задают биты номера метки (0 - сектор черный, 1 - сектор белый).
Так как такая геометрия внутреннего рисунка не задает ориентации, невозможно однозначно определить первый бит данных (изображение метки может быть повернуто на произвольный угол). Поэтому в качестве кода номера метки предлагается использовать набор бинарных последовательностей, представляющих собой так называемые комбинаторные ожерелья. Основное свойство таких последовательностей, позволяющее использовать их для идентификации меток, заключается в том, что для любой последовательности из заданного набора любая производная последовательность, полученная из исходной циклическим сдвигом в заданном направлении (в данном случае сдвиг выполняется вправо или в направлении по часовой стрелке), не совпадет с любой другой из данного набора, а также с их производными, полученными таким же способом. Так как метки могут быть видны только с одной стороны, зеркальные последовательности остаются различимыми. Число таких последовательностей Nk вычисляется по следующей формуле:
 , где n - число узлов, k - размер алфавита, di - делители числа узлов n, a ϕ(d) - функция Эйлера. В данной работе используется набор последовательностей из n=8 узлов по k=2 возможных значения на каждый узел (бит данных - {0, 1}). Для указанных значений n и k количество комбинаторных ожерелий (с учетом зеркальных) равно 36 (Фиг. 12).
, где n - число узлов, k - размер алфавита, di - делители числа узлов n, a ϕ(d) - функция Эйлера. В данной работе используется набор последовательностей из n=8 узлов по k=2 возможных значения на каждый узел (бит данных - {0, 1}). Для указанных значений n и k количество комбинаторных ожерелий (с учетом зеркальных) равно 36 (Фиг. 12).
Данный принцип кодирования опорных меток легко масштабируется для увеличения количества уникальных кодов. Основными способами являются:
- увеличение разрядности кода (n - числа узлов комбинаторных ожерелий) - например, используя n=10 разрядов, область данных во внутреннем рисунке метки делится на 10 секторов по 36° и в этом случае имеем 108 уникальных меток (для n=12 - сектора по 30° и 352 уникальных метки);
- увеличение размерности кода (k - размера алфавита комбинаторных ожерелий) - например, используя дополнительный возможный признак внутри геометрии каждого сектора в области данных (например, наличие белой/черной контрастной точки в зависимости от цвета сектора) можно увеличить размерность до k=3 и в этом случае при разрядности n=8 имеем 834 уникальных метки (для k=4 и n=8 имеем 8230 уникальных меток).
Использование перечисленных способов масштабирования сопровождается подбором диаметра опорной метки и соотношения размеров областей внутреннего рисунка. Кроме того, необходимо учитывать, что изменения в геометрии метки накладывают ограничения на характеристики датчика камеры наблюдения, для обеспечения принципиальной возможности распознать Код метки по изображению с датчика. А также изменяется дальность обнаружения опорной метки.
Таким образом, пространственное положение меток 6 в плоскости меняется в зависимости от поворота шлема, как показано на Фиг. 13.
- По расстоянию между метками 6, которые идентифицируются однозначно, и их пространственному расположению в плоскости, формируют трехмерные координаты меток, а на их основе определяют и выдают угловые координаты линии визирования (ЛВ) относительно строительной оси носителя. В результате, формируется и отображается в поле зрения летчика коллимированное изображение прицельной и символьной информации как показано на Фиг. 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2000 |
|
RU2202092C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОСИ ВИЗИРА | 2001 |
|
RU2227924C2 |
| Способ идентификации реперов при решении задачи Р4Р в авиационных оптико-электронных системах позиционирования с единственной камерой | 2020 |
|
RU2749808C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| СПОСОБ ЮСТИРОВКИ НАШЛЕМНОЙ СИСТЕМЫ ВИЗИРОВАНИЯ | 2002 |
|
RU2251720C2 |
| СПОСОБ ИЗМЕРЕНИЯ | 1995 |
|
RU2117250C1 |
| СПОСОБ ВЫСОКОТОЧНОГО ЦЕЛЕУКАЗАНИЯ | 1999 |
|
RU2165062C1 |
Изобретение относится к нашлемным системам целеуказания и индикации и предназначено для работы во всех режимах боевого применения пилотов днем и ночью. Заявленная нашлемная система целеуказания и индикации содержит систему меток, нашлемное визирное устройство, соединенное с блоком управления формированием индикации и обработки информации, связанным с камерой наблюдения, имеющей жесткую фиксацию. В заявленной системе используется не менее четырех пассивных светоотражающих меток разной формы и геометрии, которые закреплены на нашлемном визирном устройстве и расположены в разных плоскостях так, что под любым углом в пределах поворота шлема на 120 градусов в горизонтальной плоскости никогда более двух меток не лежат на одной прямой; каждая метка имеет уникальный рисунок и/или символ. Технический результат - обеспечение надежного распознавания меток на больших дистанциях удаления камеры от метки; использование любых объектов без особых требований к его размеру и форме; отсутствие потребности работы с защитным остеклением самолета; исключение перекрытия полезного сигнала от отражающих элементов; отсутствие требований по точности расположения относительно матрицы или объектива; обзор всего пространства возможных положений шлема происходит за один снятый камерой кадр. 2 н. и 8 з.п. ф-лы, 13 ил. 
1. Нашлемная система целеуказания и индикации, содержащая систему меток, нашлемное визирное устройство, соединенное с блоком управления формированием индикации и обработки информации, связанным с камерой наблюдения, имеющей жесткую фиксацию, отличающаяся тем, что используется не менее четырех пассивных светоотражающих меток разной формы и геометрии, которые закреплены на нашлемном визирном устройстве и расположены в разных плоскостях так, что под любым углом в пределах поворота шлема на 120° в горизонтальной плоскости никогда более двух меток не лежат на одной прямой; каждая метка имеет уникальный рисунок и/или символ.
2. Нашлемная система по п. 1, отличающаяся тем, что внутренний рисунок метки состоит из трех областей: область внешней границы - контур метки; область данных, поделенная на 8 секторов по 45° каждый; центральная область - центр метки.
3. Нашлемная система по п. 1, отличающаяся тем, что нашлемное визирное устройство состоит из проекционного дисплея, объектива проекционной системы, отражателя - «монокль», модуля индикации, модуля датчика освещенности.
4. Нашлемная система по п. 1, отличающаяся тем, что помимо жестко зафиксированной камеры наблюдения в состав системы входят дополнительно две камеры, выполняющие функцию пеленгаторов положения меток, расположенных на нашлемном визирном устройстве, используемых для работы системы позиционирования.
5. Нашлемная система по п. 4, отличающаяся тем, что камеры наблюдения выполнены с возможностью формирования видеоизображения меток, расположенных на нашлемном визирном устройстве в спектральном диапазоне 950±10 нм, и передачи его в блок управления формирования индикации и обработки информации для дальнейшей обработки.
6. Нашлемная система по п. 4, отличающаяся тем, что каждая камера наблюдения включает в себя следующие основные узлы: модуль камеры с установленным матричным фотоприемным устройством; объектив; светофильтр; модуль подсветки светодиодный.
7. Нашлемная система по п. 1, отличающаяся тем, что метки выполнены из материала, поверхность которого состоит из стеклянных микросфер с высоким коэффициентом отражения.
8. Способ определения углового положения линии визирования с помощью нашлемной системы целеуказания и индикации по п. 1 характеризуется тем, что метки подсвечивают в спектральном диапазоне, невидимом человеческому глазу (950 нм); подсветку осуществляют при помощи матрицы светодиодов, расположенной на камере наблюдения; рассеянное невидимое для человеческого глаза излучение от матрицы светодиодов после попадания на метки-отражатели засвечивает их, а с помощью камер наблюдения формируют видеопоток, отдельные кадры которого представляют собой изображение совокупности меток на нашлемном визирном устройстве; с помощью блока управления формирования индикации и обработки информации осуществляют измерение углового положения линии визирования (ЛВ) в разных диапазонах; измеряют угловое положение ЛВ при линейном перемещении шлема в трехмерной системе координат при отклонении шлема до ±200 мм от основного рабочего состояния; вычисляют максимальную погрешность определения углового положения ЛВ; для определения угловых координат линии визирования применяют оптический способ измерений, основанный на использовании опорных маркерных меток, которые устанавливают на нашлемном визирном устройстве; на основе входных данных: кадры камер наблюдения, 3Д модель расположения меток на нашлемном визирном устройстве и шлеме; определяют положение ЛВ, получая 6 чисел, описывающих линейное и угловое положение линии визирования.
9. Способ по п. 8, отличающийся тем, что подсветку осуществляют в импульсном режиме.
10. Способ по п. 8 или 9, отличающийся тем, что для подавления засветок и бликов в датчиках камер наблюдения используют спектральную фильтрацию в диапазоне 950±10 нм.
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2000 |
|
RU2202092C2 |
| Электрический конденсатор | 1936 |
|
SU50587A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВОЗДУХОПРОНИЦАЕМОСТИ ФИЛЬТРОВАЛЬНОЙ ТКАНИ | 0 |
|
SU294101A1 |
| US 5349179 A1, 20.09.1994 | |||
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |

