ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству обнаружения физического движения и способу управления устройством обнаружения физического движения и, в частности, относится к устройству обнаружения физического движения, пригодному для определения, что ходьба (в дальнейшем передвижение) является передвижением в подъем или передвижением в спуск, и способу управления устройством обнаружения физического движения.
УРОВЕНЬ ТЕХНИКИ
К настоящему времени существует устройство, которое обнаруживает передвижение в подъем с использованием только датчика ускорения. Например, предложен шагомер, который определяет на основании зарегистрированных значений из трехосного датчика ускорения, установленного на поясе пользователя, что передвижение является передвижением вверх по лестнице, если средняя величина ускорений в направлении передвижения между двумя ступеньками больше предварительно заданного значения, и, в противном случае, передвижение является передвижением вниз по лестнице (например, см. параграф 0034 выложенного патента Японии № 2008-262522 (в дальнейшем упоминаемого как PTD 1)).
Кроме того, предложено устройство для обнаружения подъема/опускания тела человека, которое проецирует вектор x-оси, который соответствует оси тяготения, трехосного датчика ускорения на ось тяготения, которая идентифицируется в состоянии покоя на основании зарегистрированных значений из трехосного датчика ускорения, установленного на поясе пользователя, и определяет, что тело человека наклоняется вперед, то есть поднимается, если угол x-оси относительно оси тяготения наклоняется, по меньшей мере, до некоторой степени в положительном направлении, и определяет, что тело человека отклоняется назад, то есть опускается, если угол наклоняется в отрицательном направлении (например, см. параграф 0025 и фиг. 2 выложенного патента Японии № 2008-173248 (в дальнейшем упоминаемого как 2)).
Кроме того, предложено устройство для обнаружения подъема/опускания по лестнице, которое измеряет шаг передвижения и амплитудное значение ускорения в направлении силы тяготения на основании зарегистрированных значений из трехосного датчика ускорения, установленного вблизи пояса пользователя, вычисляет амплитудное значение ускорения по измеренному шагу передвижения на основании данных таблицы характеристик передвижения на горизонтальном участке, представляющей зависимость между амплитудными значениями ускорения и предварительно сохраненными шагами передвижения при передвижении на горизонтальном участке, и определяет, что передвижение является передвижением вниз по лестнице, если измеренное амплитудное значение ускорения больше, чем вычисленное амплитудное значение ускорения, и, в противном случае, передвижение является передвижением вверх по лестнице (например, см. параграф 0026 и фиг. 3 выложенного патента Японии № 2008-154878 (в дальнейшем упоминаемого как PTD 3)).
СПИСОК ЛИТЕРАТУРЫ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
PTD 1: Выложенный патент Японии № 2008-262522
PTD 2: Выложенный патент Японии № 2008-173248
PTD 3: Выложенный патент Японии № 2008-154878
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
В соответствии с методом патента PTD 1 ускорение в направлении передвижения необходимо вычислять по ускорению по трем осям. В соответствии с методом патента PTD 2 необходимо идентифицировать ось тяготения в состоянии покоя и необходимо вычислять ускорение идентифицированной оси тяготения во время передвижения. В соответствии с методом патента PTD 3 необходимо вычислять амплитудное значение ускорения в направлении силы тяготения.
Следовательно, в соответствии с методами патентов PTD 1 - PTD 3 при попытке применения устройства для обнаружения физического движения, например шагомера или измерителя активности, посредством его свободной установки на теле пользователя, без фиксации, необходимо сначала идентифицировать предварительно заданное направление, и в связи с этим объем вычислений становится слишком большим, что затрудняет определение в реальном времени, что передвижение является передвижением в подъем или передвижением в спуск.
Настоящее изобретение создано в связи с вышеупомянутыми проблемами, и одной из целей настоящего изобретения является создание устройства для обнаружения физического движения, способного определять в реальном времени, что передвижение является передвижением в подъем или передвижением в спуск, и способа управления устройством для обнаружения физического движения.
РЕШЕНИЕ ПРОБЛЕМЫ
Для достижения вышеописанной цели в соответствии с аспектом настоящего изобретения предлагается устройство для обнаружения физического движения, которое содержит основной блок, снабженный датчиком ускорения для измерения ускорения основного блока и блоком управления, и выполнено с возможностью обнаружения физических движений пользователя, когда основной блок установлен на предварительно заданной части пользователя. Блок управления содержит измерительный элемент, выполненный с возможностью обнаружения, коснулась ли или нет грунта одна из ног пользователя, на основании зарегистрированных значений из датчика ускорения. В пределах одного цикла передвижения период, в течение которого пользователь стоит на первой ноге с момента времени, когда измерительный элемент обнаруживает, что первая нога коснулась грунта, до момента времени, когда измерительный элемент обнаруживает, что вторая нога коснулась грунта, определяется как период первой позиции. В пределах одного цикла передвижения период, в течение которого пользователь стоит на второй ноге с момента времени, когда измерительный элемент обнаруживает, что вторая нога коснулась грунта, до момента времени, когда измерительный элемент обнаруживает, что первая нога коснулась грунта, определяется как период второй позиции. Блок управления дополнительно содержит вычислительный элемент, выполненный с возможностью вычисления характерного значения для зарегистрированных значений, измеренных датчиком ускорения для каждого из периода первой позиции и периода второй позиции (например, интеграла для каждого периода или средней величины из максимального значения и минимального значения для каждого периода), на основании зарегистрированных значений, измеренных датчиком ускорения, и решающий элемент, выполненный с возможностью определения, является ли передвижение или нет передвижением в подъем или передвижением в спуск, на основании результата сравнения характерных значений, вычисленных вычислительным элементом для периода первой позиции и периода второй позиции.
В предпочтительном варианте решающий элемент определяет, является ли передвижение или нет передвижением в подъем или передвижением в спуск, на основании результата сравнения, является ли или нет отношение характерного значения для периода первой позиции к характерному значению для периода второй позиции равным или большим, чем предварительно заданное значение.
В более предпочтительном варианте устройство обнаружения физического движения дополнительно содержит извещающий блок, выполненный с возможностью предоставления пользователю порции предварительно заданной информации, и блок ввода, выполненный с возможностью получения ввода порции предварительно заданной информации от пользователя. Блок управления дополнительно содержит элемент управления извещением, выполненный с возможностью управления извещающим блоком, для предоставления пользователю результата определения решающим элементом, элемент получения ввода, выполненный с возможностью получения, из блока ввода, ввода порции информации об истинности или ложности, представляющей показатель истинности или ложности результата, представляемого извещающим блоком, и настроечный элемент, выполненный с возможностью настройки предварительно заданного значения в соответствии с показателем истинности или ложности, представленным порцией информации об истинности или ложности, полученной элементом получения ввода.
В более предпочтительном варианте устройство обнаружения физического движения дополнительно содержит блок ввода, выполненный с возможностью получения ввода порции предварительно заданной информации от пользователя. Блок управления дополнительно содержит элемент получения ввода, выполненный с возможностью получения из блока ввода ввода для изменения предварительно заданного значения, и настроечный элемент, выполненный с возможностью изменения предварительно заданного значения в соответствии с вводом, полученным элементом получения ввода.
В более предпочтительном варианте предварительно заданное значение является значением, предварительно найденным статистическим методом. В предпочтительном варианте вычислительный элемент вычисляет интеграл зарегистрированных значений для каждого из периода первой позиции и периода второй позиции в качестве характерного значения. В предпочтительном варианте вычислительный элемент вычисляет значение с использованием максимального значения и минимального значения зарегистрированных значений для каждого из периода первой позиции и периода второй позиции в качестве характерного значения.
В соответствии с другим аспектом настоящего изобретения предлагается способ управления для управления устройством для обнаружения физического движения, которое содержит основной блок, снабженный датчиком ускорения для обнаружения ускорения основного блока и блоком управления, и выполнено с возможностью обнаружения физических движений пользователя, когда основной блок установлен на предварительно заданной части пользователя. Блок управления выполнен с возможностью выполнения этапа обнаружения, коснулась ли или нет грунта одна из ног пользователя, на основании зарегистрированных значений из датчика ускорения. В пределах одного цикла передвижения период, в течение которого пользователь стоит на первой ноге с момента времени, когда обнаруживается, что первая нога коснулась грунта, до момента времени, когда обнаруживается, что вторая нога коснулась грунта, определяется как период первой позиции. В пределах одного цикла передвижения период, в течение которого пользователь стоит на второй ноге с момента времени, когда обнаруживается, что вторая нога коснулась грунта, до момента времени, когда обнаруживается, что первая нога коснулась грунта, определяется как период второй позиции. Блок управления выполнен с возможностью выполнения далее этапа вычисления характерного значения для зарегистрированных значений, измеренных датчиком ускорения для каждого из периода первой позиции и периода второй позиции (например, интеграла для каждого периода или средней величины из максимального значения и минимального значения для каждого периода), на основании зарегистрированных значений, измеренных датчиком ускорения, и этапа определения, является ли передвижение или нет передвижением в подъем или передвижением в спуск, на основании результата сравнения характерных значений, вычисленных для периода первой позиции и периода второй позиции.
ПОЛЕЗНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
В соответствии с устройством обнаружения физического движения и способом управления устройством обнаружения физического движения по настоящему изобретению произошло ли или нет касание грунта одной из ног пользователя, обнаруживается на основании зарегистрированных значений из датчика ускорения, характерное значение для зарегистрированных значений, измеренных датчиком ускорения для каждого из периода первой позиции и периода второй позиции, вычисляется на основании зарегистрированных значений, измеренных датчиком ускорения, и определение, является ли передвижение или нет передвижением в подъем или передвижением в спуск, выполняется на основании результата сравнения характерных значений, вычисленных для периода первой позиции и периода второй позиции.
Следовательно, такое состояние, как является ли передвижение или нет передвижением в подъем или передвижением в спуск, можно определять на основании результата сравнения характерных значений периода первой позиции и периода второй позиции в течение одного цикла. Поскольку передвижение в подъем или передвижение в спуск можно определять без необходимости идентификации наклона устройства обнаружения физического движения, то объем вычислений можно уменьшить. В результате, можно обеспечить устройство обнаружения физического движения, способное моментально, во время передвижения, определять, что передвижение является передвижением в подъем или передвижением в спуск, и способ управления для устройства обнаружения физического движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - внешний вид измерителя активности в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 2 - изображение ситуации, в которой применяют измеритель активности в соответствии с вариантом осуществления.
Фиг. 3 - график, поясняющий изменения комплексного ускорения по трем осям во время передвижения.
Фиг. 4 - график, поясняющий изменения комплексного ускорения по трем осям во время передвижения в подъем.
Фиг. 5 - график, поясняющий изменения комплексного ускорения по трем осям во время передвижения на горизонтальном участке.
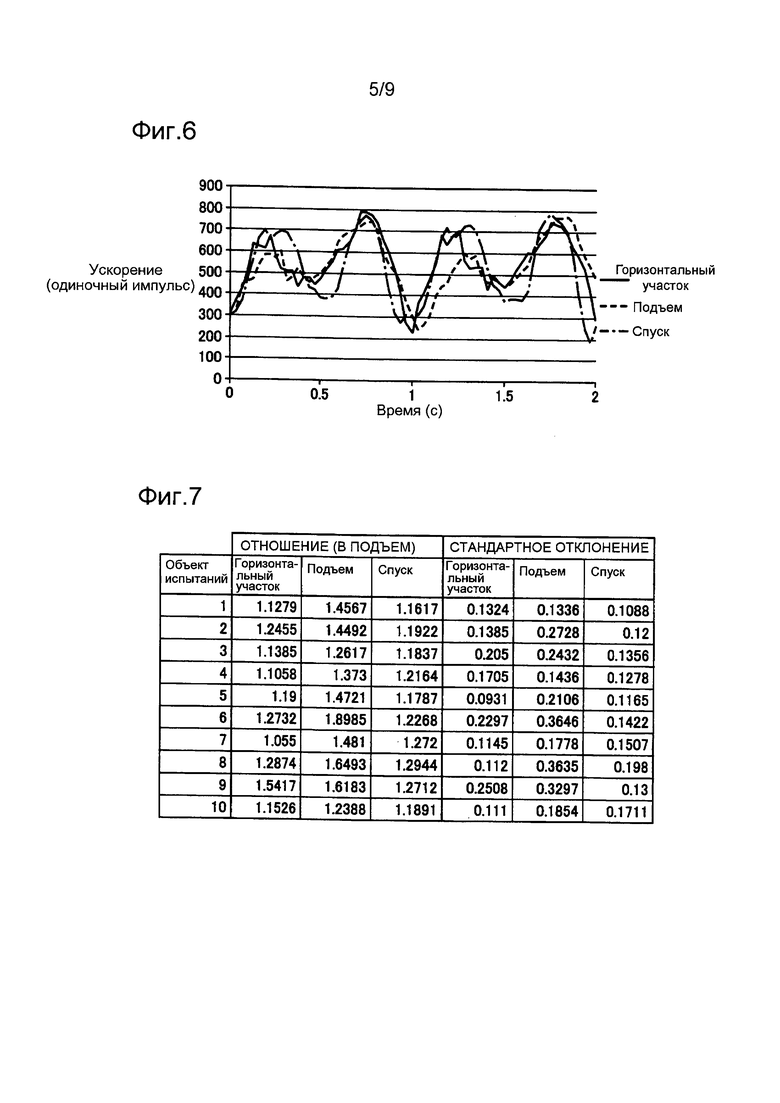
Фиг. 6 - совмещенный график, поясняющий изменения комплексных ускорений по трем осям во время передвижения на горизонтальном участке, передвижения в подъем и передвижения в спуск.
Фиг. 7 - таблица, содержащая список средних отношений и стандартных отклонений интегралов ускорений в течение периода позиции левой ноги и периода позиции правой ноги во время передвижения на горизонтальном участке, передвижения в подъем и передвижения в спуск.
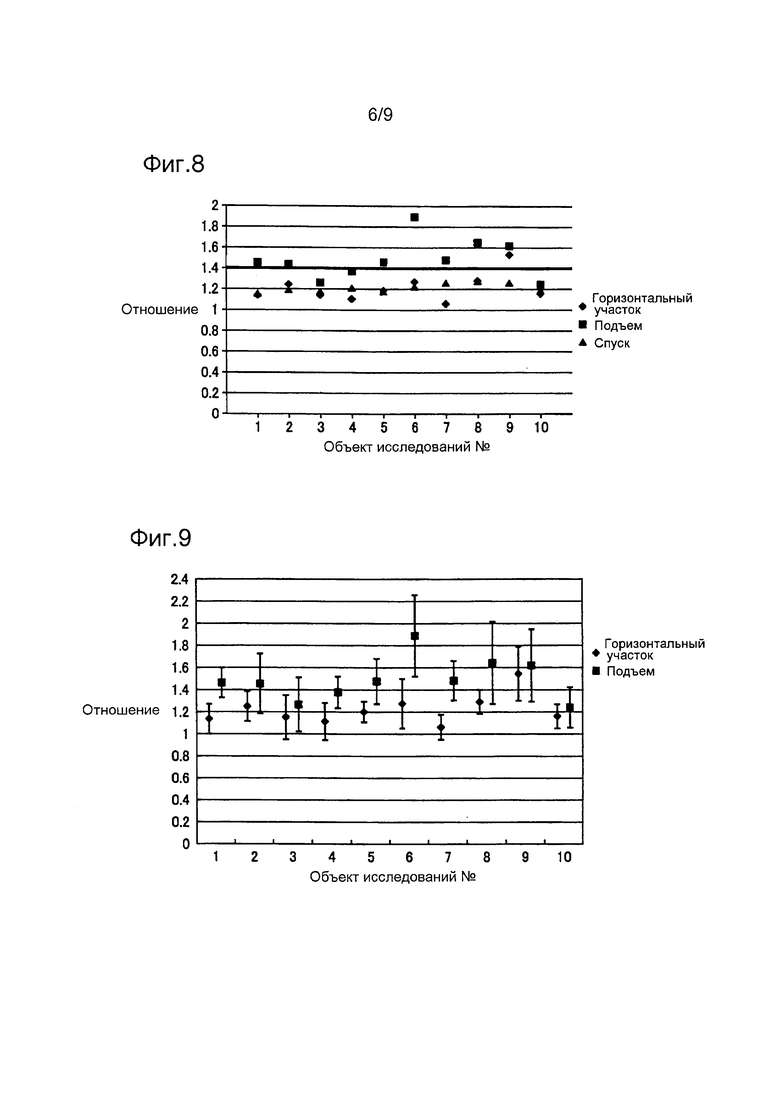
Фиг. 8 - график, содержащий средние отношения интегралов ускорений в течение периода позиции левой ноги и периода позиции правой ноги во время передвижения на горизонтальном участке, передвижения в подъем и передвижения в спуск, нанесенные для каждого объекта испытаний.
Фиг. 9 - график, поясняющий диапазон средних отношений интегралов ускорений в течение периода позиции левой ноги и периода позиции правой ноги во время передвижения на горизонтальном участке и передвижения в подъем для каждого объекта испытаний.
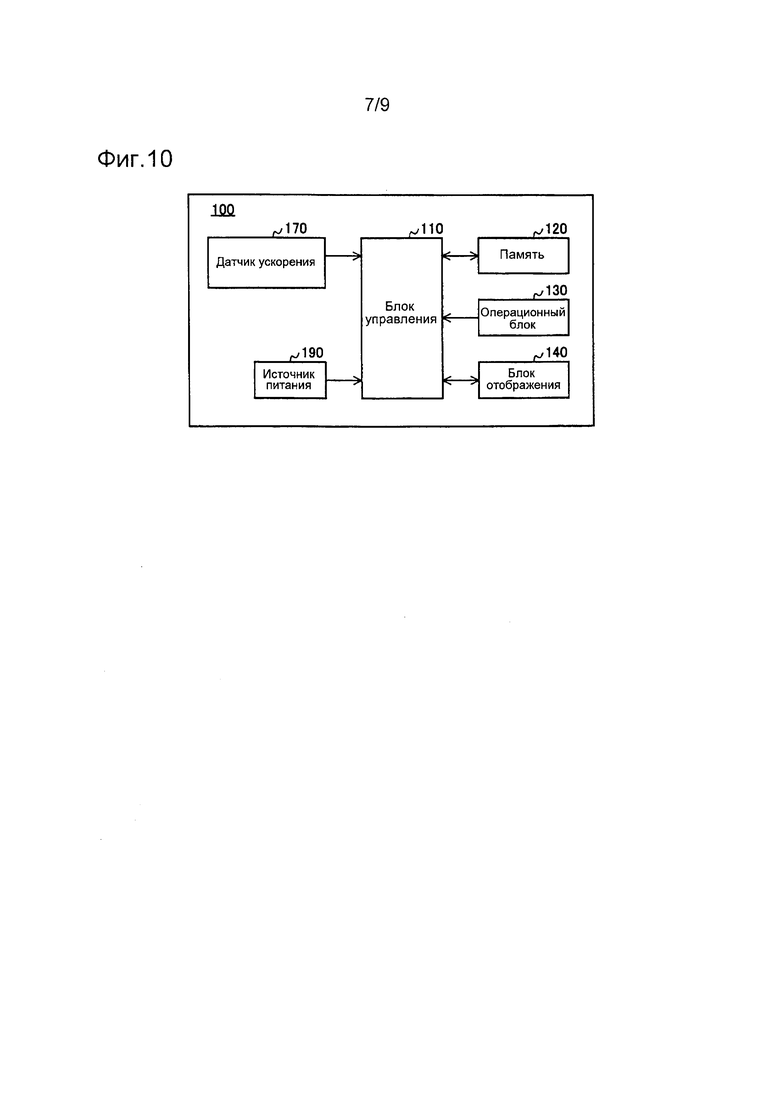
Фиг. 10 - блок-схема, поясняющая схематическую конфигурацию измерителя активности в соответствии с вариантом осуществления.
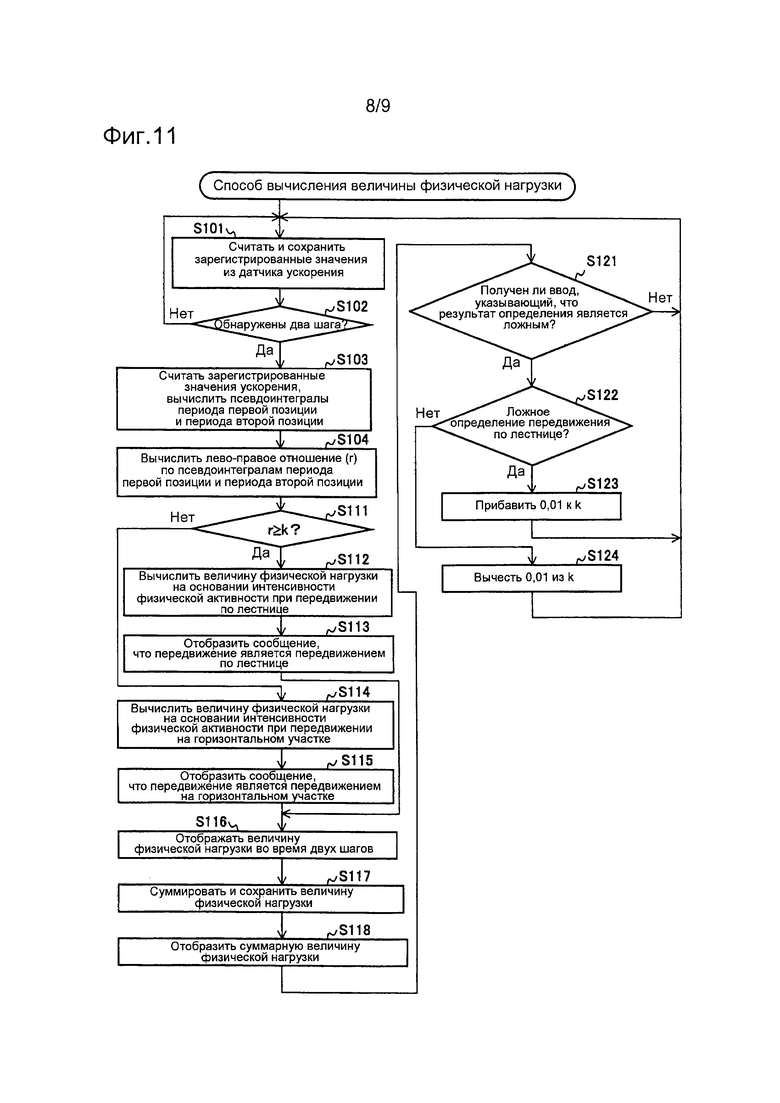
Фиг. 11 - блок-схема последовательности операций способа, поясняющая процедуру способа вычисления величины физической нагрузки, выполняемого блоком управления измерителя активности в соответствии с вариантом осуществления; и
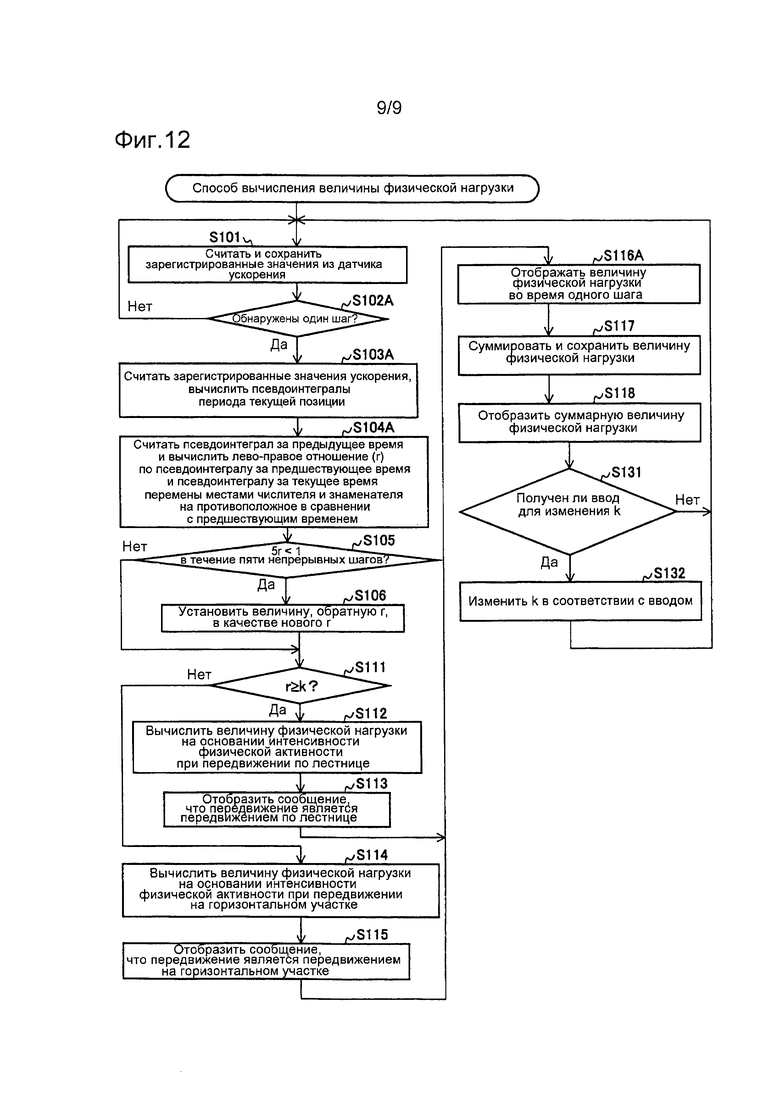
фиг. 12 - блок-схема последовательности операций способа, поясняющая процедуру способа вычисления величины физической нагрузки, выполняемого блоком управления измерителя активности в соответствии со вторым вариантом осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже приведено подробное описание вариантов осуществления настоящего изобретения со ссылкой на чертежи. Следует отметить, что одинаковые или соответствующие участки на чертежах обозначены одинаковыми числовыми позициями, и их описание не повторяется.
В вариантах осуществления настоящего изобретения устройство обнаружения физического движения будет описано как измеритель активности, способный измерять не только шаги, но также величину физической активности (называемую также величиной физической нагрузки) при физических нагрузках и ежедневной деятельности (например, работе с электровакуумным пылесосом, переноске легкого изделия, приготовлении пищи и т.п.).
Первый вариант осуществления
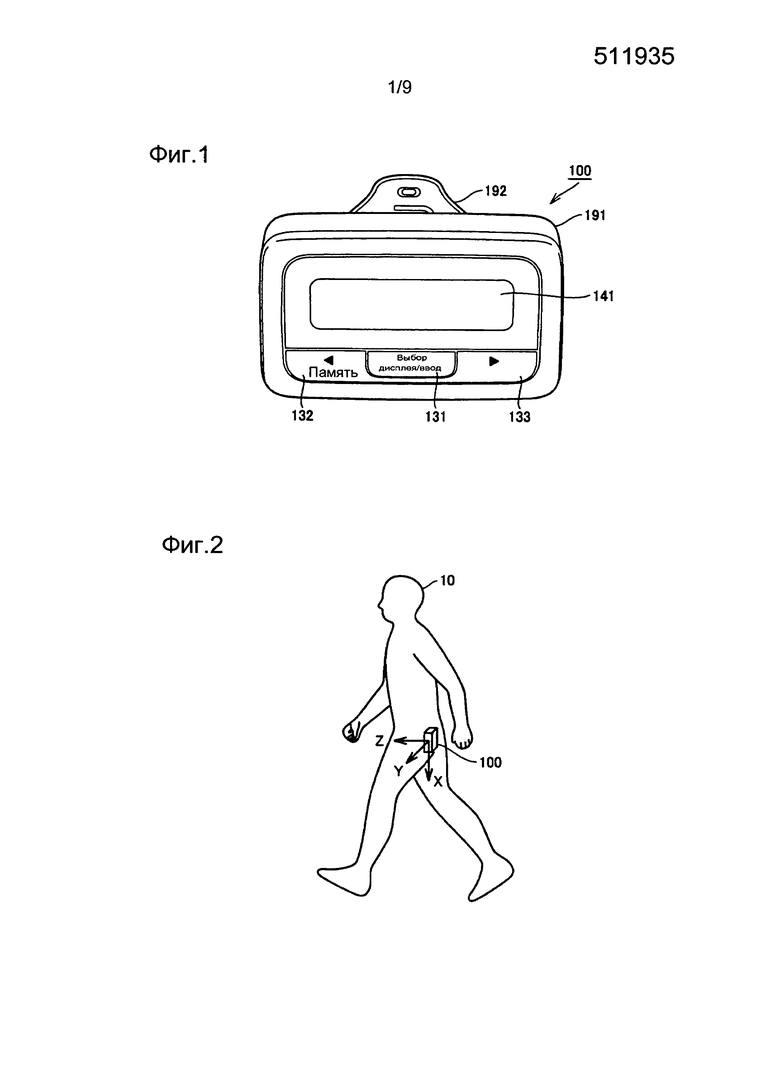
На фиг. 1 приведен внешний вид измерителя 100 активности в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 1, измеритель 100 активности в основном содержит основной блок 191 и зажим 192. Зажим 192 используют для фиксации измерителя 100 активности на одежде и т.п. пользователя.
Основной блок 191 снабжен переключателем 131 выбора дисплея/ввода, который составляет часть операционного блока 130, подлежащего описанию в дальнейшем, левым переключателем 132 управления/памяти, правым переключателем 133 управления и дисплеем 141, который составляет часть блока 140 отображения, подлежащего описанию в дальнейшем.
В настоящем варианте осуществления дисплей 141 описан как ЖК-дисплей (жидкокристаллический дисплей), но не ограничен упомянутым дисплеем и может быть дисплеем других типов, например, ЭЛ- (электролюминесцентным) дисплеем и т.п.
На фиг. 2 изображена ситуация, в которой применяют измеритель 100 активности в соответствии с вариантом осуществления. Как показано на фиг. 2, измеритель 100 активности может удерживаться пользователем 10 в незафиксированном состоянии в кармане брюк пользователя или может быть установлен в состоянии, зафиксированном, например, на ремне вокруг пояса пользователя 10, посредством зажима 192.
Измеритель 100 активности может быть выполнен для удерживания в зафиксированном состоянии или незафиксированном состоянии на других частях тела пользователя 10, без ограничения вышеупомянутыми карманом или ремнем.
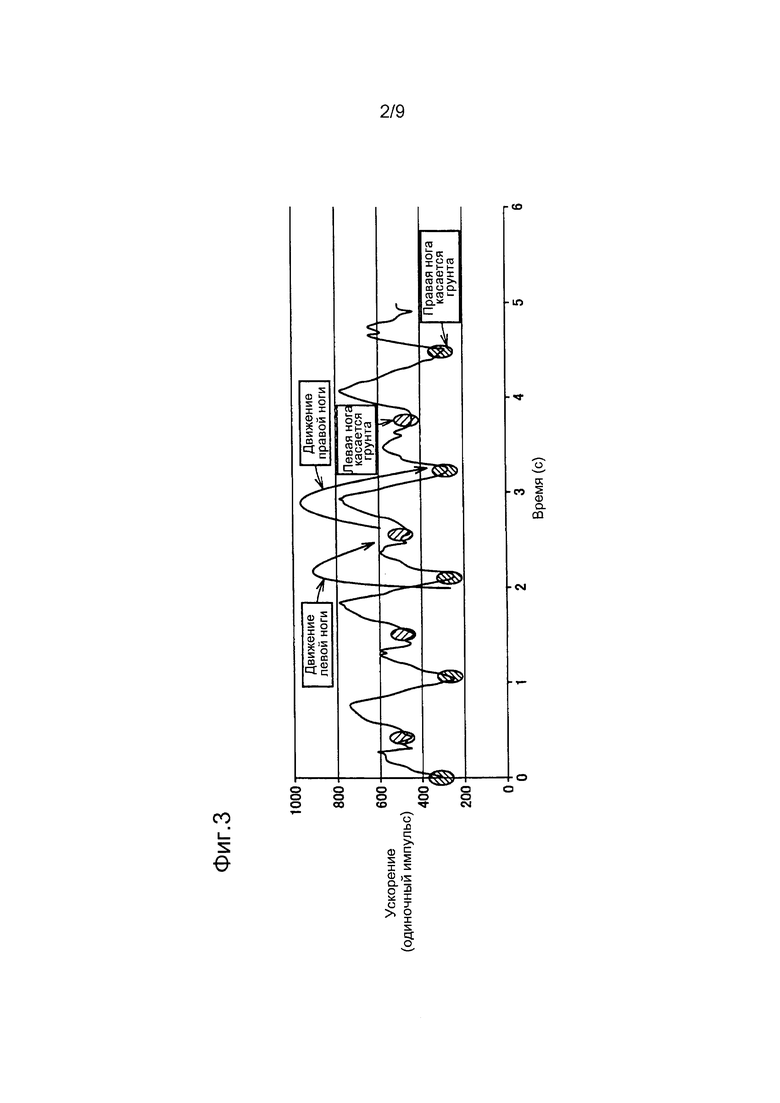
На фиг. 3 представлен график, поясняющий изменения комплексного ускорения по трем осям во время передвижения. Как показано на фиг. 3, график поясняет изменения комплексного ускорения по трем осям на выходе датчика 170 ускорения (подлежащего описанию в дальнейшем), когда пользователь передвигается пешком. Например, моменты времени около 0 секунд, 1 секунды, 2,1 секунд, 3,2 секунд или 4,5 секунд на оси времени, когда ускорение имеет минимальное значение, являются моментами времени, когда правая нога коснулась грунта, и моменты времени около 0,5 секунд, 1,5 секунд, 2,6 секунд или 3,8 секунд на оси времени являются моментами времени, когда левая нога коснулась грунта.
Таким образом, изменения ускорения в период позиции правой ноги от момента времени около 2,1 секунд, когда правая нога коснулась грунта, до момента времени около 2,6 секунд, когда левая нога коснулась грунта, вызваны движениями левой ноги, и изменения ускорения в период позиции левой ноги от момента времени около 2,6 секунд, когда левая нога коснулась грунта, до момента времени около 3,2 секунд, когда правая нога коснулась грунта, вызваны движениями правой ноги.
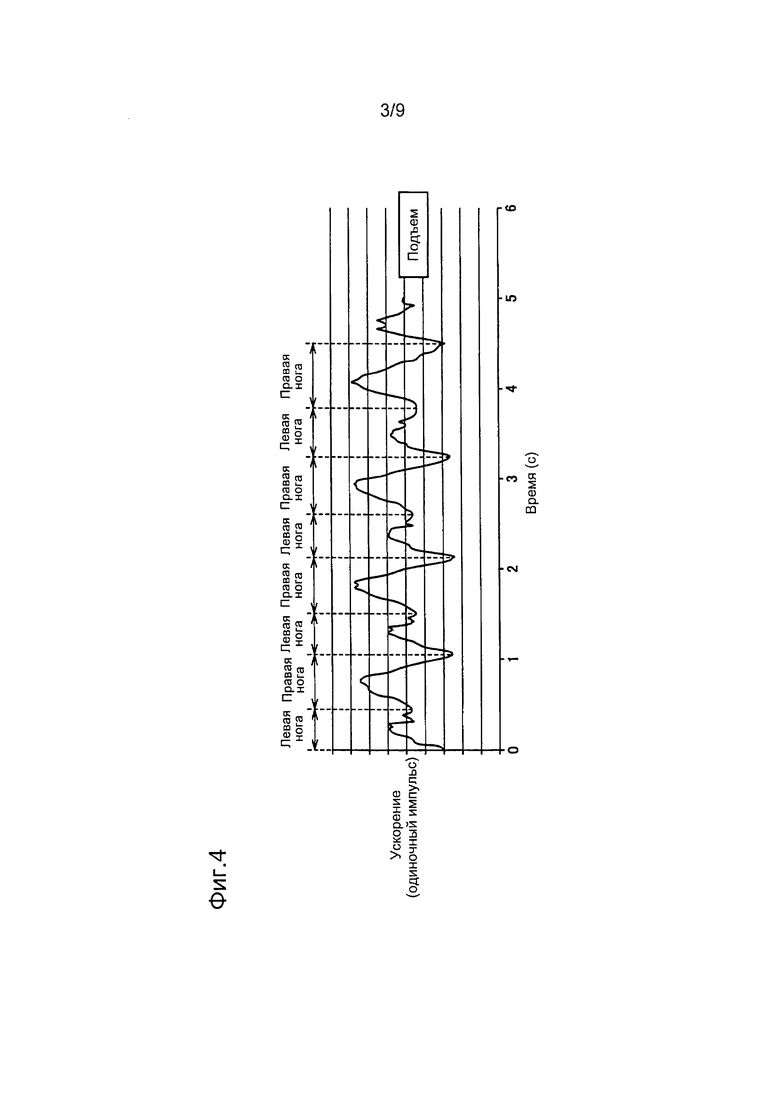
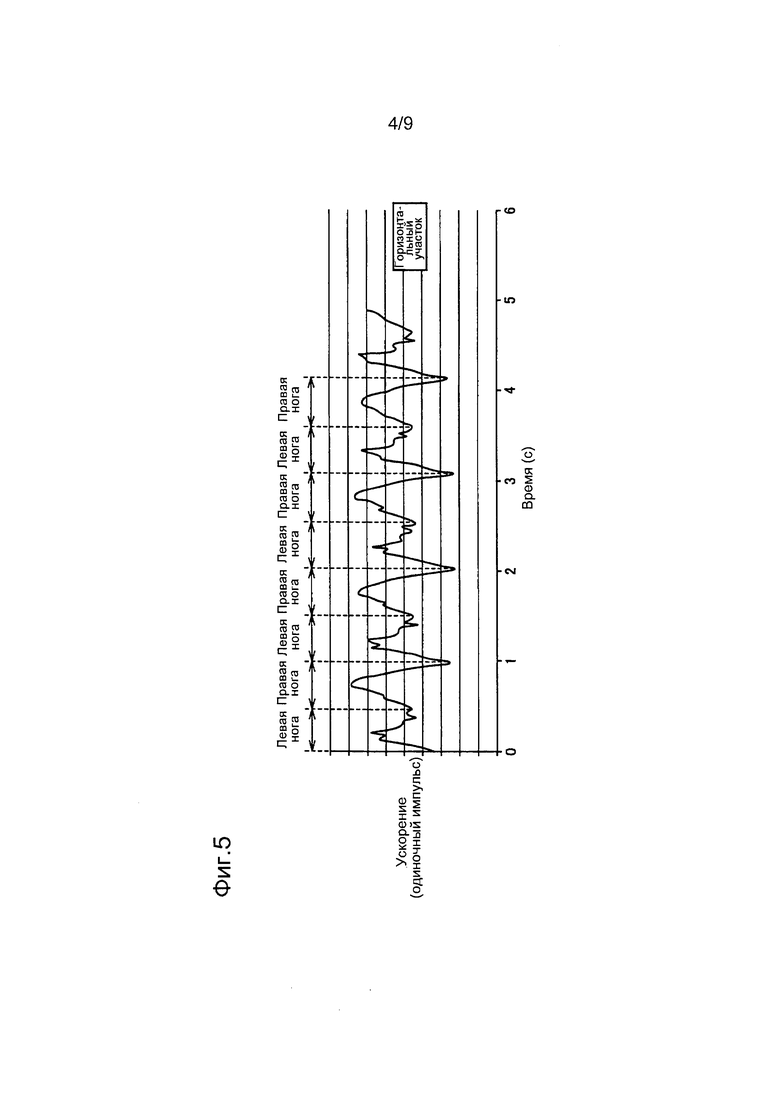
На фиг. 4 представлен график, поясняющий изменения комплексного ускорения по трем осям во время передвижения в подъем, и на фиг. 5 представлен график, поясняющий изменения комплексного ускорения по трем осям во время передвижения на горизонтальном участке. На фиг. 4 и 5 можно видеть, что во время передвижения изменения ускорения в то время, когда двигается правая нога, отличаются от изменений ускорения в то время, когда двигается левая нога.
На фиг. 6 представлен совмещенный график, поясняющий изменения комплексного ускорения по трем осям во время передвижения на горизонтальном участке, передвижения в подъем и передвижения в спуск. На фиг. 6 можно видеть, что разность между ускорениями в период позиции первой ноги и период позиции второй ноги во время передвижения в подъем больше, чем между ускорениями в период позиции первой ноги и период позиции второй ноги во время передвижения на горизонтальном участке и передвижения в спуск.
На фиг. 7 представлена таблица, содержащая список средних отношений и стандартных отклонений интегралов ускорений в течение периода позиции левой ноги и периода позиции правой ноги во время передвижения на горизонтальном участке, передвижения в подъем и передвижения в спуск. На фиг. 7 можно видеть, что для 8 объектов испытаний из 10 объектов испытаний, за исключением объектов испытаний № 3 и № 10, среднее отношение интегралов ускорений в течение периода позиции левой ноги и периода позиции правой ноги во время передвижения в подъем, с очевидностью, больше, чем среднее отношение во время передвижения на горизонтальном участке и передвижения в спуск. Таким образом, можно определить, является ли передвижение передвижением в подъем или передвижением на горизонтальном участке или в спуск по отношению ускорения левой ноги и ускорения правой ноги.
На фиг. 8 представлен график, содержащий средние отношения интегралов ускорений в течение периода позиции левой ноги и периода позиции правой ноги во время передвижения на горизонтальном участке, передвижения в подъем и передвижения в спуск, нанесенные для каждого объекта испытаний. На фиг. 9 представлен график, поясняющий диапазон средних отношений интегралов ускорений в течение периода позиции левой ноги и периода позиции правой ноги во время передвижения на горизонтальном участке и передвижения в подъем для каждого объекта испытаний.
Как показано на фиг. 8 и 9, если пороговое значение установлено равным 1,4, то, по существу, можно различать передвижение в подъем и передвижение на горизонтальном участке. Как можно видеть, большинство отношений для передвижения в подъем равно или больше чем 1,4, и большинство отношений для передвижения на горизонтальном участке меньше чем 1,4.
На фиг. 10 представлена блок-схема, поясняющая схематическую конфигурацию измерителя 100 активности в соответствии с настоящим вариантом осуществления. Как показано на фиг. 10, измеритель 100 активности содержит блок 110 управления, память 120, операционный блок 130, блок 140 отображения, датчик 170 ускорения и источник 190 питания. Измеритель 100 активности может также содержать звуковой блок для выдачи звуковых сигналов и интерфейс для связи с внешним компьютером.
Блок 110 управления, память 120, операционный блок 130, блок 140 отображения, датчик 170 ускорения и источник 190 питания расположены внутри основного блока 191, описанного со ссылкой на фиг. 1.
Операционный блок 130 содержит переключатель 131 выбора дисплея/ввода, левый переключатель 132 управления/памяти и правый переключатель 133 управления, которые описаны со ссылкой на фиг. 1, и выполнен с возможностью передачи сигналов управления, представляющих операции, выполняемые упомянутыми переключателями, в блок 110 управления.
В качестве датчика 170 ускорения применен полупроводниковый датчик, использующий технологию MEMS (микроэлектромеханических систем), но датчик ускорения не ограничен данной технологией и может быть датчиком другого типа, например механическим или оптическим датчиком. В настоящем варианте осуществления датчик 170 ускорения выполнен с возможностью выдачи, в блок 110 управления, измерительных сигналов, представляющих ускорения по трем осям соответственно. Однако датчик 170 ускорения не ограничен датчиком ускорения по трем осям и может быть одноосным датчиком ускорения или двухосным датчиком ускорения.
Память 120 содержит энергонезависимую память, например ROM (постоянное запоминающее устройство) (например, флэш-память), и энергозависимую память, например RAM (оперативным запоминающим устройством) (например, SDRAM (синхронным динамическим оперативным запоминающим устройством)).
Память 120 выполнена с возможностью сохранения данных программы для управления измерителем 100 активности, данных, используемых для управления измерителем 100 активности, установочных данных для установки различных функций измерителя 100 активности и данных результатов измерений нескольких шагов, величину физической активности и т.п. каждый раз через предварительно заданное время (например, ежедневно). Память 120 используется также в качестве рабочей памяти и т.п. в то время, когда выполняется программа.
Блок 110 управления содержит ЦП (центральный процессор) и выполнен с возможностью работы по программе, хранящейся в памяти 120, для управления измерителем 100 активности, чтобы управлять памятью 120 и блоком 140 отображения по измерительным сигналам из датчика 170 ускорения, в ответ на сигналы управления из операционного блока 130.
Блок 140 отображения содержит дисплей 141, описанный со ссылкой на фиг. 1, и выполнен с возможностью управления дисплеем 141 для отображения порции предварительно заданной информации в соответствии с управляющим сигналом из блока 110 управления.
Источник 190 питания содержит сменную батарею и выполнен с возможностью подачи питания из батареи в каждый компонент, например блок 110 управления в измерителе 100 активности, который нуждается в электропитании для работы.
На фиг. 11 представлена блок-схема последовательности операций способа, поясняющая процедуру способа вычисления величины физической нагрузки, выполняемого блоком 110 управления измерителя 100 активности в соответствии с вариантом осуществления. Как показано на фиг. 11, на этапе S101 блок 110 управления считывает зарегистрированные значения, представленные измерительными сигналами из датчика 170 ускорения для каждого цикла замеров, и назначает памяти 120 сохранить зарегистрированные значения.
Затем на этапе S102 блок 110 управления определяет, обнаружено ли или нет передвижение, анализируемое по двум шагам (в дальнейшем именуемое двухшаговым передвижением). Если двухшаговое передвижение не обнаружено (НЕТ на этапе S102), то блок 110 управления повторяет обработку данных на этапе S101.
Напротив, если двухшаговое передвижение обнаружено (ДА на этапе S102), то на этапе S103 блок 110 управления считывает зарегистрированные значения ускорения, сохраненные в памяти 120, и вычисляет псевдоинтеграл da для периода первой позиции, когда одна нога стоит во время первого шага, и псевдоинтеграл db для периода второй позиции, когда другая нога стоит во время второго шага. Псевдоинтегралы могут вычисляться для каждого периода, например, посредством сложения зарегистрированных значений для каждого цикла замеров в течение каждого периода.
После этого на этапе S104 блок 110 управления вычисляет лево-правое отношение r по псевдоинтегралам периодов первой и второй позиций.
В частности, в то время, когда обнаружено предварительно заданное число шагов (например, 10 шагов), блок 110 управления сначала выполняет сравнение, чтобы определить больший интеграл из псевдоинтеграла da для периода первой позиции и псевдоинтеграла db для периода второй позиции, определяет ногу, которая характеризуется большими интегралами в течение периода ее позиции, и задает псевдоинтеграл ускорения ноги, которая характеризуется большими интегралами в течение периода позиции, как dl и псевдоинтеграл ускорения другой ноги, которая характеризуется меньшими интегралами в течение периода позиции, как ds, чтобы вычислять лево-правое отношение r=dl/ds.
Допускается вариант, в котором блок 110 управления задает больший интеграл из псевдоинтегралов da и db как dl и меньший интеграл как ds, чтобы вычислять лево-правое отношение r=dl/ds для каждого двухшагового передвижения. В общем, r вычисляют для каждого объекта испытаний таким образом, что псевдоинтеграл в течение периода позиции ноги, характеризующейся большим псевдоинтегралом ускорения, задается как числитель, и псевдоинтеграл в течение периода позиции ноги, характеризующейся меньшим псевдоинтегралом ускорения, задается как знаменатель.
Затем на этапе S111 блок 110 определяет, является ли или нет лево-правое отношение r равным или большим, чем k. В настоящем варианте осуществления, как упоминалось со ссылкой на фиг. 8, исходное значение k установлено 1,4.
Если определение показывает, что r равно или больше, чем k (ДА на этапе S111), то передвижение определяется как передвижение в подъем, и на этапе S112 блок 110 управления вычисляет величину физической нагрузки на основании интенсивности физической активности при передвижении вверх по лестнице.
В частности, интенсивности физической активности при передвижении вверх по лестнице, передвижении на горизонтальном участке и передвижении вниз по лестнице, например, устанавливаются равными 8,0 МЭ (метаболическим эквивалентам), 3,0 МЭ и 3,0 МЭ соответственно на основании описаний в справочном документе («Exercise and Physical Activity Reference for Health Promotion 2006» (July, 2006), Preparation Committee for Recommended Exercise Allowance and Exercise Guidelines).
При использовании вышеупомянутой интенсивности физической активности величину физической нагрузки EV (физической нагрузки (Ex) для каждого предварительно заданного цикла (например, каждых двух шагов) вычисляют по уравнению: EV (Ex)=Σ (Es×ET), где Es (МЭ) означает интенсивность физической активности, и ET (час) означает время продолжения каждого физического движения.
Время для двухшагового передвижения вычисляют как ET (час), и, поскольку Es=8,0 (МЭ), то величина физической нагрузки вычисляется как EV (Ex)=8,0 (МЭ)×ET (час).
Затем на этапе S113 блок 110 управления отображает на блоке 140 отображения сообщение, что передвижение является передвижением по лестнице. Допускается вариант отображения сообщения, что передвижение является передвижением вверх по лестнице. Затем блок 110 управления переходит к выполнению обработки данных на этапе S116.
С другой стороны, если определение показывает, что r меньше, чем k (НЕТ на этапе S111), то передвижение определяется как передвижение (передвижение на горизонтальном участке или передвижение в спуск), отличающееся от передвижения в подъем, и на этапе S114 блок 110 управления вычисляет величину физической нагрузки на основании интенсивности физической активности при передвижении на горизонтальном участке.
В данном случае время для двухшагового передвижения вычисляют как ET (час), и, поскольку Es=3,0 (МЭ), то величина физической нагрузки вычисляется как EV (Ex)=3,0 (МЭ)×ET (час).
Затем на этапе S115 блок 110 управления отображает на блоке 140 отображения сообщение, что передвижение является передвижением на горизонтальном участке. Допускается вариант отображения сообщения, что передвижение не является передвижением вверх по лестнице. Затем блок 110 управления переходит к выполнению обработки данных на этапе S116.
На этапе S116 блок 110 управления отображает на блоке 140 отображения величину физической нагрузки двухшагового передвижения, вычисленную на этапе S112 или этапе S114. На этапе S117 блок 110 управления суммирует все величины физической нагрузки и сохраняет суммарную величину физической нагрузки в памяти 120, и на этапе S118 блок 110 управления отображает суммарную величину физической нагрузки на блоке 140 отображения.
Затем на этапе S121 блок 110 управления определяет, был ли получен или нет ввод, указывающий, что результат определения, отображенный на этапе S113 или этапе S115, является ложным, из операционного блока 113. Если определение указывает, что упомянутый ввод не был получен (НЕТ на этапе S121), то блок 110 управления возвращается к выполнению обработки данных на этапе S101.
С другой стороны, если определение показывает, что ввод, указывающий, что результат определения является ложным, был получен (ДА на этапе S121), то на этапе S122 блок 110 управления определяет, выполнен ли или нет ввод, указывающий, что результат определения является ложным, в отношении результата определения, показывающего, что передвижение является передвижением по лестнице.
Если определяется, что ввод, указывающий, что результат определения является ложным, выполнен в отношении результата определения, показывающего, что передвижение является передвижением по лестнице (ДА на этапе S122), то на этапе S123 блок 110 управления прибавляет 0,01 к пороговому значению k лево-правого отношения.
С другой стороны, если определяется, что ввод, указывающий, что результат определения является ложным, выполнен не в отношении результата определения, показывающего, что передвижение является передвижением по лестнице, другими словами, если определяется, что ввод, указывающий, что результат определения является ложным, выполнен в отношении результата определения, показывающего, что передвижением является передвижение на горизонтальном участке (НЕТ на этапе S122), то на этапе S124 блок 110 управления вычитает 0,01 из порогового значения k лево-правого отношения. После этапа S123 или этапа S124, блок 110 управления возвращается к выполнению обработки данных на этапе S101.
Итоговая информация по первому варианту осуществления
(1) Как упоминалось выше, измеритель 100 активности в соответствии с первым вариантом осуществления является таким устройством, которое содержит основной блок 191, снабженный датчиком 170 ускорения для измерения ускорения основного блока 191 и блоком 110 управления, и выполнено с возможностью обнаружения физических движений пользователя 10, когда основной блок 191 установлен на предварительно заданной части пользователя. Как упоминалось для этапа S102, произошло ли или нет касание грунта ногой пользователя, обнаруживается блоком 110 управления на основании зарегистрированных значений из датчика 170 ускорения.
Период первой позиции относится к периоду в пределах одного цикла передвижения, в течение которого пользователь стоит на первой ноге с момента времени, когда обнаруживается, что первая нога коснулась грунта, до момента времени, когда обнаруживается, что вторая нога коснулась грунта. Период второй позиции относится к периоду в пределах одного цикла передвижения, в течение которого пользователь стоит на второй ноге с момента времени, когда обнаруживается, что вторая нога коснулась грунта, до момента времени, когда обнаруживается, что первая нога коснулась грунта.
Как упоминалось для этапа S103, блок 110 управления вычисляет псевдоинтеграл зарегистрированных значений из датчика 170 ускорения в течение каждого из периода первой позиции и периода второй позиции на основании зарегистрированных значений из датчика 170 ускорения, и, как упоминалось для этапа S104 и этапа S111, определяет, является ли передвижение или нет передвижением в подъем, на основании отношения между вычисленным псевдоинтегралом периода первой позиции и вычисленным псевдоинтегралом периода второй позиции.
Таким образом, является ли передвижение или нет передвижением в подъем, можно определить в зависимости от вычисленного отношения между псевдоинтегралом периода первой позиции и псевдоинтегралом периода второй позиции за один цикл. Поскольку передвижение в подъем или передвижение в спуск может быть определено без необходимости идентификации наклона устройства для обнаружения физического движения, то возможно уменьшение объема вычислений. В результате, во время передвижения можно моментально определить, что передвижение является передвижением в подъем.
(2) Как упоминалось для этапа S104 и этапа S111, блок 110 управления определяет, является ли передвижение или нет передвижением в подъем, на основании результата сравнения, является ли или нет отношение между псевдоинтегралом периода первой позиции и псевдоинтегралом периода второй позиции равным или большим, чем предварительно заданное значение (например, 1,4).
(3) Измеритель 100 активности дополнительно содержит блок 140 отображения, выполненный с возможностью предоставления пользователю порции предварительно заданной информации, и операционный блок 130, выполненный с возможностью получения ввода порции предварительно заданной информации от пользователя. Как упоминалось для этапа S113 и этапа S115, блок 110 управления управляет блоком 140 отображения, для представления результата определения, является ли передвижение или нет передвижением в подъем, и, как упоминалось для этапа S121 и этапа S122, ввод порции информации об истинности - ложности, указывающей, является ли представленный результат истинным или ложным, принимается из операционного блока 130, и, как упоминалось для этапа S123 и этапа S124, предварительно заданное значение настраивается в соответствии с полученной порцией информации об истинности - ложности.
Таким образом, определение передвижения в подъем можно выполнять с большей точностью в соответствии с такими характеристиками, как особенность передвижения и т.п. пользователя.
(4) Кроме того, предварительно заданное значение является значением, предварительно найденным статистическим методом.
(5) Как упоминалось для этапа S103, блок 110 управления вычисляет псевдоинтеграл зарегистрированных значений в течение каждого из периода первой позиции и периода второй позиции в качестве характерного значения.
Второй вариант осуществления
В первом варианте осуществления для определения, является ли передвижение или нет передвижением в подъем, лево-правое отношение r двухшагового передвижения вычисляется для каждых двух шагов. Во втором варианте осуществления для определения, является ли передвижение или нет передвижением в подъем, лево-правое отношение r относительно предыдущего шага вычисляется для каждого единичного шага.
В первом варианте осуществления зарегистрированные значения датчика 170 ускорения для каждого из периода первой позиции и периода второй позиции в пределах каждого цикла замеров суммируют для вычисления псевдоинтеграла. Во втором варианте осуществления псевдоинтеграл вычисляется по максимальному зарегистрированному значению ускорения и минимальному зарегистрированному значению ускорения из датчика 170 ускорения для каждого из периода первой позиции и периода второй позиции.
На фиг. 12 представлена блок-схема последовательности операций способа, поясняющая процедуру способа вычисления величины физической нагрузки, выполняемого блоком 110 управления измерителя 100 активности в соответствии со вторым вариантом осуществления. Как показано на фиг. 12, этап S101 является таким же, как этап S101 на фиг. 11.
Затем на этапе S102A блок 110 управления определяет, обнаружено ли или нет передвижение, анализируемое по одному шагу (в дальнейшем именуемое одношаговым передвижением). Если одношаговое передвижение не обнаружено (НЕТ на этапе S102A), то блок 110 управления повторяет обработку данных S101.
С другой стороны, если одношаговое передвижение обнаружено (ДА на этапе S102A), то на этапе S103A блок 110 управления считывает зарегистрированные значения ускорения, сохраненные в памяти 120, и вычисляет псевдоинтеграл df периода текущей позиции. Псевдоинтеграл df вычисляется по формуле df=(|amax|+|amin|)×T, где T означает длительность одношагового передвижения, amax означает максимальное зарегистрированное значение ускорения для ускорения на протяжении данной длительности и amin означает минимальное зарегистрированное значение ускорения для ускорения на протяжении данной длительности.
В вышеприведенном описании принято, что как максимальное зарегистрированное значение amax ускорения, так и минимальное зарегистрированное значение amin ускорения никогда не бывают меньше нуля. В случае когда максимальное зарегистрированное значение amax ускорения и минимальное зарегистрированное значение amin ускорения могут быть меньше нуля, псевдоинтеграл df вычисляется по формуле df=|amax+amin|×T.
После этого на этапе S104A блок 110 управления считывает псевдоинтеграл dg за предыдущее время и вычисляет лево-правое отношение r по псевдоинтегралу dg за предыдущее время и псевдоинтегралу df за текущее время посредством перемены местами числителя и знаменателя обратно числителю и знаменателю в предыдущее время. В частности, если r в предыдущее время вычисляется по формуле r=df/dg, то r в текущее время вычисляется по формуле r=dg/df; если r в предыдущее время вычисляется по формуле r=dg/df, то r в текущее время вычисляется по формуле r=df/dg. Соответственно r вычисляется для каждого объекта испытаний таким образом, что псевдоинтеграл в период позиции ноги, характеризующейся большим псевдоинтегралом ускорения, служит числителем и псевдоинтеграл в период позиции ноги, характеризующейся меньшим псевдоинтегралом ускорения, служит знаменателем.
Затем на этапе S105 выполняется определение, меньше ли или нет r, чем 1, в течение предварительно заданного числа непрерывных шагов (например, 5 шагов), другими словами, существует ли или нет возможность, что левая нога и правая нога сменяются на обратный порядок при вычислении лево-правого отношения r.
Если определяется, что r меньше чем 1 в течение предварительно заданного числа непрерывных шагов (ДА на этапе S105), то на этапе S106 блок 110 управления устанавливает величину, обратную r, в качестве нового r.
Если определяется, что r не меньше чем 1 в течение предварительно заданного числа непрерывных шагов (НЕТ на этапе S105), а также после этапа S106 блок 110 управления выполняет такую же обработку данных, как обработка на этапах от этапа S111 до этапа S115, показанных на фиг. 11.
На этапе S116A, следующим за этапом S113 или этапом S115, блок 110 управления отображает на блоке 140 отображения величину физической нагрузки одношагового передвижения, вычисленную на этапе S112 или этапе S114. После этого блок 110 управления выполняет такую же обработку данных, как на этапе S117 и этапе S118 на фиг. 11.
Затем на этапе S131 блок 110 управления определяет, получен ли или нет ввод для изменения порогового значения k лево-правого отношения из операционного блока 130. Если определяется, что упомянутый ввод не получен (НЕТ на этапе S131), то блок 110 управления возвращается к выполнению обработки данных на этапе S101.
С другой стороны, если определяется, что ввод для изменения k получен (ДА на этапе S131), то на этапе S132 блок 110 управления изменяет пороговое значение k лево-правого отношения в соответствии с вводом. Затем блок 110 управления возвращается к выполнению обработки данных на этапе S101.
Итоговая информация по второму варианту осуществления
Как упоминалось выше, в дополнение к эффектам, обеспечиваемым измерителем 100 активности, описанным в первом варианте осуществления, измеритель 100 активности в соответствии со вторым вариантом осуществления обеспечивает следующие дополнительные эффекты.
(1) Измеритель 100 активности в соответствии со вторым вариантом осуществления является таким устройством, которое содержит основной блок 191, снабженный датчиком 170 ускорения для измерения ускорения основного блока 191 и блоком 110 управления, и выполнено с возможностью обнаружения физических движений пользователя 10, когда основной блок 191 установлен на предварительно заданной части пользователя. Как упоминалось для этапа S102A, произошло ли или нет касание грунта ногой пользователя, обнаруживается блоком 110 управления на основании зарегистрированных значений из датчика 170 ускорения.
Период первой позиции относится к периоду в пределах одного цикла передвижения, в течение которого пользователь стоит на первой ноге с момента времени, когда обнаруживается, что первая нога коснулась грунта, до момента времени, когда обнаруживается, что вторая нога коснулась грунта. Период второй позиции относится к периоду в пределах одного цикла передвижения, в течение которого пользователь стоит на второй ноге с момента времени, когда обнаруживается, что вторая нога коснулась грунта, до момента времени, когда обнаруживается, что первая нога коснулась грунта.
Как упоминалось для этапа S103A, блок 110 управления вычисляет псевдоинтеграл зарегистрированных значений из датчика 170 ускорения в течение каждого из периода первой позиции и периода второй позиции на основании зарегистрированных значений из датчика 170 ускорения, и, как упоминалось для этапа S104A и этапа S111, определяет, является ли передвижение или нет передвижением в подъем, на основании отношения между вычисленным псевдоинтегралом периода первой позиции и вычисленным псевдоинтегралом периода второй позиции.
Таким образом, является ли передвижение или нет передвижением в подъем, можно определить в зависимости от вычисленного отношения между псевдоинтегралом периода первой позиции и псевдоинтегралом периода второй позиции за один цикл. Поскольку передвижение в подъем может быть определено без необходимости идентификации наклона устройства для обнаружения физического движения, то возможно уменьшение объема вычислений. В результате, во время передвижения можно моментально определить, что передвижение является передвижением в подъем.
(2) Как упоминалось для этапа S104A и этапа S111, блок 110 управления определяет, является ли передвижение или нет передвижением в подъем, на основании результата сравнения, является ли или нет отношение между псевдоинтегралом периода первой позиции и псевдоинтегралом периода второй позиции равным или большим, чем предварительно заданное значение (например, 1,4).
(3) Измеритель 100 активности дополнительно содержит операционный блок 130, выполненный с возможностью получения ввода порции предварительно заданной информации от пользователя. Как упоминалось для этапа S131, если из операционного блока 130 принимается ввод для изменения предварительно заданного значения, то, как упоминалось для этапа S132, блок 110 управления изменяет предварительно заданное значение в соответствии с полученным вводом.
Таким образом, определение передвижения в подъем можно выполнять с большей точностью в соответствии с такими характеристиками, как особенность передвижения и т.п. пользователя.
(4) Кроме того, предварительно заданное значение является значением, предварительно найденным статистическим методом.
(5) Блок 110 управления вычисляет псевдоинтеграл зарегистрированных значений в течение каждого из периода первой позиции и периода второй позиции в качестве характерного значения.
(6) Блок 110 управления вычисляет псевдоинтеграл с использованием максимального значения и минимального значения зарегистрированных значений в течение каждого из периода первой позиции и периода второй позиции в качестве характерного значения.
(7) По сравнению с первым вариантом осуществления во втором варианте осуществления объем вычислений для получения псевдоинтегралов меньше, и, тем самым, можно экономить энергию измерителя 100 активности.
Модификация
(1) Измеритель 100 активности описан в вышеприведенных вариантах осуществления, но не ограничен ими, и может быть другим устройством или таким измерителем активности, как шагомер, если он может использовать результат определения, является ли передвижение или нет передвижением в подъем или передвижением в спуск по значениям ускорения.
(2) В вышеприведенных вариантах осуществления определение, является ли передвижение или нет передвижением в подъем, выполняется на основании результата сравнения между интегралами или псевдоинтегралами периода первой позиции и периода второй позиции. Однако определение тем самым не ограничивается, и на основании результата сравнения допускается определять, является ли передвижение или нет передвижением в спуск.
(3) В вышеприведенных вариантах осуществления в качестве характерных значений периода первой позиции и периода второй позиции используются псевдоинтегралы. Однако характерные значения тем самым не ограничиваются и могут быть любым идентифицируемым характерным значением, допускающим использование для сравнения зарегистрированных значений датчика 170 ускорений в течение периода первой позиции и периода второй позиции. Например, характерное значение может быть средним значением в течение некоторого периода времени.
(4) В вышеупомянутом первом варианте осуществления конфигурация предусматривает, что показатель истинности или ложности результата определения, что передвижение является передвижением в подъем, вводится на двух уровнях, то есть истинности или ложности, и пороговое значение лево-правого отношения настраивается в соответствии с вводом показателя истинности или ложности. В частности, в случае, когда определение, что передвижение является передвижением в подъем, является ложным, пороговое значение лево-правого отношения увеличивается на 0,01; тогда как в случае, когда определение, что передвижение является передвижением на горизонтальном участке, является ложным, пороговое значение лево-правого отношения уменьшается на 0,01. Однако приведенный подход не налагает ограничения и можно применить любой другой способ, если он допускает настройку предварительно заданного значения для выполнения определения в соответствии с показателем истинности или ложности результата определения передвижения.
Например, в случае когда передвижение содержит несколько десятков шагов передвижения на горизонтальном участке и несколько десятков шагов передвижения в подъем, результат определения для каждого из передвижения на горизонтальном участке и передвижения в подъем с показателями истинности или ложности определения оценивается по 4 уровням, то есть посредством операционного блока 130 можно вводить «почти истинный», «по большей части истинный», «по большей части ложный» и «почти ложный». Таким образом, во время передвижения на горизонтальном участке, в соответствии с введенными оценками «почти истинный», «по большей части истинный», «по большей части ложный» и «почти ложный», пороговое значение лево-правого отношения может быть установлено как «сохраняемое исходным», «сохраняемое исходным», «уменьшаемое на 0,01» и «уменьшаемое на 0,02» соответственно. При передвижении в подъем, в соответствии с введенными оценками «почти истинный», «по большей части истинный», «по большей части ложный» и «почти ложный», пороговое значение лево-правого отношения может быть установлено как «сохраняемое исходным», «сохраняемое исходным», «увеличиваемое на 0,01» и «увеличиваемое на 0,02» соответственно.
(5) В вышеприведенных вариантах осуществления в качестве датчика 170 ускорения применен датчик ускорений по трем осям; однако датчик не ограничен упомянутым датчиком, в настоящем изобретении применим также одноосный датчик ускорения или двухосный датчик ускорения.
(6) В вышеприведенных вариантах осуществления настоящее изобретение описано как изобретение такого устройства для обнаружения физического движения, как измеритель 100 активности. Однако настоящее изобретение тем самым не ограничено, и его можно рассматривать как изобретение способа управления или управляющей программы для управления устройством для обнаружения физического движения.
(7) Следует понимать, что варианты осуществления, приведенные в настоящей заявке, представлены для иллюстрации и описания, но не ограничены ни в одном из аспектов. Предполагается, что объем настоящего изобретения не ограничен вышеприведенным описанием, а определяется объемом охраны формулы изобретения и включает в себя все модификации, эквивалентные по смыслу и объему формуле изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
10: пользователь; 100: измеритель активности; 110: блок управления; 120: память; 130: операционный блок; 131: переключатель выбора дисплея/ввода; 132: левый переключатель управления/памяти; 133: правый переключатель управления; 140: блок отображения; 141: дисплей; 170: датчик ускорения; 190: источник питания; 191: основной блок; 192: зажим.
Изобретение относится к медицинской технике, а именно к устройствам измерения и обнаружения физического движения. Устройство содержит основной блок, снабжённый датчиком ускорения и блоком управления, который выполнен с возможностью обнаружения, коснулась или нет грунта одна нога пользователя, на основании зарегистрированных значений из датчика ускорения. Блок управления выполнен также с возможностью вычисления характерного значения для зарегистрированных значений, измеренных датчиком ускорения для каждого из периода первой позиции и периода второй позиции, и определения, является ли передвижение в подъём или нет, на основании результата сравнения характерных значений. Этапы способа осуществляются посредством работы устройства. Использование устройства позволяет упростить определение физического движения в реальном времени при передвижении в подъём. 2 н. и 5 з.п. ф-лы, 12 ил., 1 табл.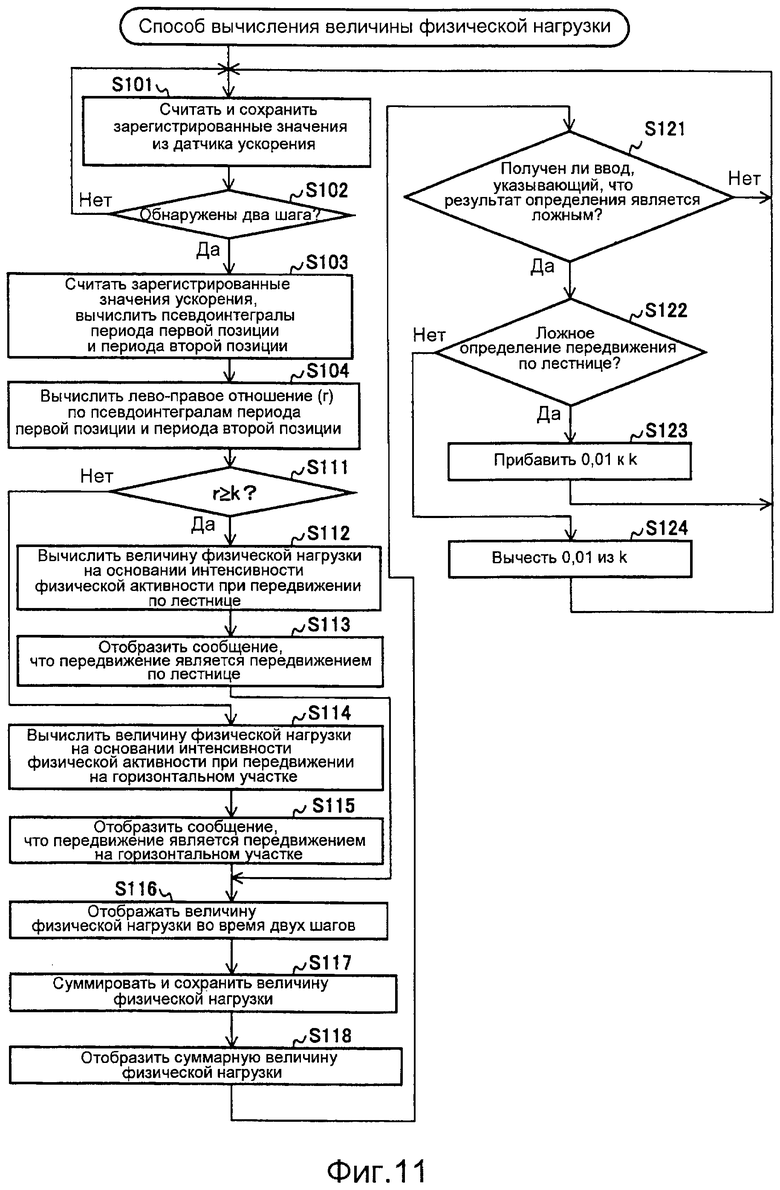
1. Устройство для обнаружения физического движения, которое содержит основной блок, снабженный датчиком ускорения для измерения ускорения упомянутого основного блока и блоком управления, и выполнено с возможностью обнаружения физических движений пользователя, когда упомянутый основной блок установлен на предварительно заданной части пользователя,
при этом упомянутый блок управления выполнен с возможностью
обнаружения, коснулась ли или нет грунта одна из ног упомянутого пользователя, на основании зарегистрированных значений из упомянутого датчика ускорения,
причем в пределах одного цикла передвижения период, в течение которого упомянутый пользователь стоит на первой ноге с момента времени, когда упомянутый блок управления обнаруживает, что упомянутая первая нога коснулась грунта, до момента времени, когда упомянутый блок управления обнаруживает, что вторая нога коснулась грунта, определяется как период первой позиции и
в пределах одного цикла передвижения период, в течение которого упомянутый пользователь стоит на упомянутой второй ноге с момента времени, когда упомянутый блок управления обнаруживает, что упомянутая вторая нога коснулась грунта, до момента времени, когда упомянутый блок управления обнаруживает, что упомянутая первая нога коснулась грунта, определяется как период второй позиции,
причем упомянутый блок управления выполнен с возможностью вычисления характерного значения для зарегистрированных значений, измеренных упомянутым датчиком ускорения для каждого из упомянутого периода первой позиции и упомянутого периода второй позиции, на основании зарегистрированных значений, измеренных упомянутым датчиком ускорения, и
определения, является ли передвижение передвижением в подъем или нет, на основании результата сравнения упомянутых характерных значений, вычисленных упомянутым блоком управления для упомянутого периода первой позиции и упомянутого периода второй позиции.
2. Устройство для обнаружения физического движения по п. 1, в котором упомянутый блок управления определяет, является ли передвижение передвижением в подъем или нет, на основании результата сравнения, является ли или нет отношение упомянутого характерного значения для упомянутого периода первой позиции к упомянутому характерному значению для упомянутого периода второй позиции равным или большим, чем предварительно заданное значение.
3. Устройство для обнаружения физического движения по п. 2, дополнительно содержащее
блок отображения, выполненный с возможностью предоставления пользователю порции предварительно заданной информации, и
операционный блок, выполненный с возможностью получения ввода порции предварительно заданной информации от пользователя,
при этом упомянутый блок управления дополнительно выполнен с возможностью
управления упомянутым блоком отображения для предоставления пользователю результата, найденного упомянутым блоком управления,
при этом операционный блок дополнительно выполнен с возможностью получения порции информации об истинности или ложности, представляющей показатель истинности или ложности результата, представляемого упомянутым блоком отображения, и
причем упомянутый блок управления дополнительно выполнен с возможностью
настройки упомянутого, предварительно заданного значения в соответствии с показателем истинности или ложности, представленным порцией информации об истинности или ложности, полученной упомянутым операционным блоком.
4. Устройство для обнаружения физического движения по п. 2, дополнительно содержащее операционный блок, выполненный с возможностью получения ввода порции предварительно заданной информации от пользователя,
при этом упомянутый блок управления дополнительно выполнен с возможностью
получения из упомянутого операционного блока ввода для изменения упомянутого, предварительно заданного значения, и
выполнен с возможностью изменения упомянутого, предварительно заданного значения в соответствии с вводом, полученным упомянутым операционным блоком.
5. Устройство для обнаружения физического движения по п. 1, в котором упомянутый блок управления выполнен с возможностью вычисления интеграла зарегистрированных значений для каждого из упомянутого периода первой позиции и упомянутого периода второй позиции в качестве упомянутого характерного значения.
6. Устройство для обнаружения физического движения по п. 1, в котором упомянутый блок управления выполнен с возможностью вычисления значения с использованием максимального значения и минимального значения зарегистрированных значений для каждого из упомянутого периода первой позиции и упомянутого периода второй позиции в качестве упомянутого характерного значения.
7. Способ управления для управления устройством для обнаружения физического движения, которое содержит основной блок, снабженный датчиком ускорения для измерения ускорения упомянутого основного блока и блоком управления, и выполнено с возможностью обнаружения физических движений пользователя, когда упомянутый основной блок установлен на предварительно заданной части пользователя,
при этом упомянутый блок управления выполнен с возможностью выполнения
этапа обнаружения, коснулась ли или нет грунта одна из ног упомянутого пользователя, на основании зарегистрированных значений из упомянутого датчика ускорения,
причем в пределах одного цикла передвижения период, в течение которого упомянутый пользователь стоит на первой ноге с
момента времени, когда обнаруживается, что упомянутая первая нога коснулась грунта, до момента времени, когда обнаруживается, что вторая нога коснулась грунта, определяется как период первой позиции и
в пределах одного цикла передвижения период, в течение которого упомянутый пользователь стоит на упомянутой второй ноге с момента времени, когда обнаруживается, что упомянутая вторая нога коснулась грунта, до момента времени, когда обнаруживается, что упомянутая первая нога коснулась грунта, определяется как период второй позиции,
причем упомянутый блок управления выполнен с дополнительной возможностью выполнения
этапа вычисления характерного значения для зарегистрированных значений, измеренных упомянутым датчиком ускорения для каждого из упомянутого периода первой позиции и упомянутого периода второй позиции, на основании зарегистрированных значений, измеренных упомянутым датчиком ускорения, и
этапа определения, является ли передвижение передвижением в подъем или нет, на основании результата сравнения упомянутых характерных значений, вычисленных для упомянутого периода первой позиции и упомянутого периода второй позиции.
| US 2004249316 А1 09.12.2004 | |||
| RU 2008147134 А 10.06.2010 | |||
| Водоподогреватель - свод для паровозных котлов | 1928 |
|
SU11540A1 |

