Изобретение относится к дистанционному зондированию пространства с целью определения дальности и скорости рассеивателей. В частности, к улучшению пространственного разрешения по дальности и разрешения по скорости при использовании импульсных доплеровских систем с внутриимпульсной когерентной обработкой сигналов. Например, для повышения разрешения по скорости и дальности при использовании когерентных доплеровских лидаров в задаче измерения профиля ветра в атмосфере.
Традиционные импульсные доплеровские системы, использующие внутриимпульсную когерентную обработку отраженных сигналов, имеют ограничения на разрешение по дальности ΔR и разрешение по скорости ΔV. При длительности излучаемого импульса τи разрешение по дальности составляет ΔR=c τи/2, а разрешение по скорости ΔV=λ/(2·τи), где с - скорость распространения излучаемой волны, X - длина волны. В результате получается противоречие: чтобы улучшить пространственное разрешение, следует уменьшать длительность излучаемого импульса τи, а для повышения разрешения по скорости длительность импульса следует увеличивать. Это приводит к ограничению: ΔRΔV=сλ/4.
Известен корреляционный метод однозначного измерения дальности и скорости, основанный на измерении в импульсном режиме профиля интенсивности обратно рассеянного сигнала вдоль всей трассы распространения излучения и измерения суммарного доплеровского спектра вдоль всей трассы с помощью непрерывной доплеровской системы. С периодичностью смены рассеивателей в луче цикл измерений повторяют, а скорость на каждой дальности определяют по доплеровской частоте, на которой получается максимум функции взаимной корреляции между профилем интенсивности обратно рассеянного сигнала (отражаемостью) и спектральной плотностью доплеровского спектра [1, 2].
Недостатком метода является слабая избирательность функции корреляции при немонотонной зависимости проекции скорости рассеивателей от дальности вдоль траектории луча. Дополнительным недостатком метода является маскировка сигналов с больших дальностей мощными сигналами от близких дальностей.
Наиболее близким методом является метод измерения скоростей и дальностей рассеивателей импульсным доплеровским лидаром с внутриимпульсной когерентной обработкой сигнала, в котором излучают импульсы зондирующего излучения, по задержке отраженного сигнала определяют дальность рассеивателей, а по доплеровскому спектру отраженного сигнала, полученного при когерентной обработке внутри импульса, определяют проекцию скорости рассеивателей [3].
Недостатком известного способа является ограниченное разрешение по дальности и скорости рассеивателей ΔRΔV=сλ/4, которое во многих приложениях не позволяет получать детальную картину движений.
Технический результат предложенного способа заключается в повышении разрешения по дальности и скорости рассеивателей за счет того, что излучают длинные импульсы, регистрируют суммарный доплеровский спектр отраженного сигнала на длинном участке траектории зондирования с высоким разрешением по скорости, затем по той же траектории излучают короткие импульсы, регистрируют профиль интенсивности отраженного сигнала вдоль длинного участка, а по корреляции между интенсивностью отраженного сигнала вдоль длинного участка и спектральной плотностью доплеровского спектра определяют проекции скоростей рассеивателей вдоль длинного участка.
Для повышения надежности результатов в сложных случаях, например при множественных целях, или малом отношении сигнал/шум, цикл измерений повторяют с периодичностью смены рассеивателей в зондируемом объеме или с периодичностью изменения отражаемости рассеивателей, а корреляционные характеристики накапливают.
На фиг.1 приведен пример обнаружения двух целей, имеющих близкие скорости и близкое расположение в пространстве. Проекция скорости первой цели V1=400м/c, а второй V2=415 м/с. Доплеровский спектр рассеянного сигнала формируется от длинных импульсов, пространственная протяженность которых составляет сτи1/2=45 км. Профиль отражаемости по трассе регистрируется короткими импульсами τи2, которые обеспечивают разрешение по дальности ΔR=cτи2/2=30 м.
На фиг.2а сплошной линией представлен пример отражаемости σ, измеренной вдоль длинного импульса при первом цикле измерений в момент времени t1. Цели зарегистрированы на дальности R2=100530м±15м и дальности R3=100560м±15м, которые различаются на 30 м. В следующий цикл измерений, через 0,2 секунды, в момент времени t2, цели смещаются на дальности R5 и R6 и изменяют отражаемость (показано пунктиром). Изменение отражаемости во времени происходит за счет многократной интерференции отраженного когерентного сигнала у сложных целей. Это происходит даже при незначительном изменениии ракурса зондирования за счет смещения целей. На фиг.2б сплошной линией показан доплеровский спектр обратно рассеянного сигнала, полученного от целей при посылке длинных испульсов в первом цикле измерений, а пунктиром - спектр, полученный при посылке длинных испульсов в следующем цикле через 0,2 с. Очевидно, что цель 2, имеющая большую отражаемость, даст на доплеровском спектре большее значение спектральной плотности. Изменение спектра связано с изменением отражаемости целей от цикла к циклу. Переключение режима работы с длинных на короткие импульсы происходит в каждом цикле за время, много меньшее, чем время корреляции интенсивности принимаемых сигналов.
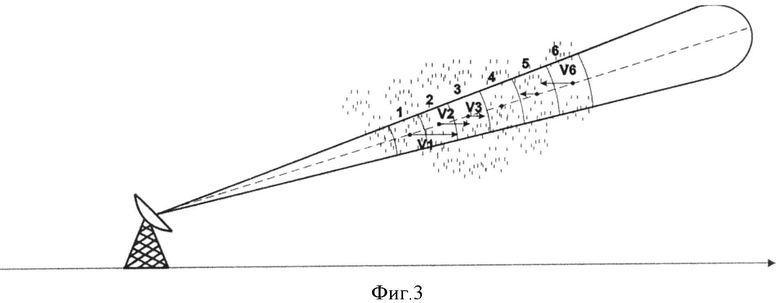
На фиг.3 приведен пример повышения разрешения по дальности и скорости рассеивателей при зондировании ветра с помощью оптического лидара. Проекция скорости уменьшается с дальностью и меняет свой знак в пределах длинного импульса. Доплеровский спектр рассеянного сигнала формируется при внутриимпульсной когерентной обработке длинных импульсов, пространственная протяженность которых составляет сτи1/2=900 м. Профиль отражаемости по трассе регистрируется короткими импульсами τи2, которые обеспечивают разрешение по дальности=сτи2/2=150 м.
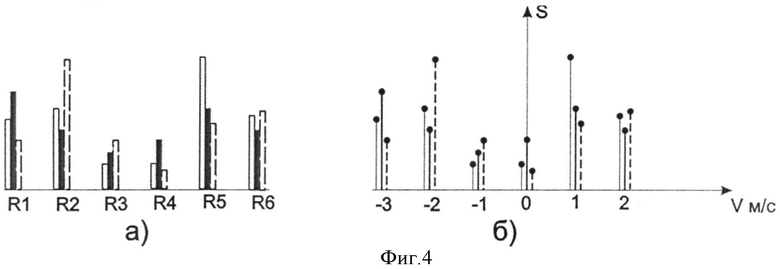
На фиг.4а представлен пример изменения отражаемости σ во времени, зарегистрированной на шести интервалах дальностях ∆R, которые различаются на 150 м. На каждом интервале дальности сплошным, заштрихованным и пунктирным прямоугольниками представлены по 3 значения отражаемости, полученные для трех циклов измерений. Изменение отражаемости во времени происходит за счет смены рассеивателей в зондируемом объеме и их неоднородного распределения в пространстве. На фиг.4б в виде сплошных вертикальных отрезков показан доплеровский спектр обратно рассеянного сигнала, полученного одновременно от всех шести интервалов дальности при посылке длинных импульсов. Жирными отрезками и пунктирными отрезками показаны спектры, полученные в последующие моменты времени. На каждой частоте представлены три отрезка, соответствующие трем моментам времени. Переключение режима работы с длинных на короткие импульсы происходит за время, много меньшее, чем время корреляции принимаемых сигналов, так что три доплеровские спектра на фиг.4б соответствуют трем профилям отражаемости, показанным на фиг.4а.
Первый пример использования предлагаемого способа относится к обнаружению 2 целей, перемещающихся в группе, фиг.1. Пусть первая и вторая цели имеют проекции скорости на направление зондирования, равные V1=400м/c и V2=415 м/с, соответственно, первая при начале измерений располагается на дальности R10=l00530 м, а вторая - на R20=l00570 м. Длина волны РЛС составляет 8 мм. При зондировании длинными импульсами длительностью τи1/=0.3*10-3 с протяженность измеряемого объема составит cτи1/2=45км. Положение измеряемого объема в пространстве R будет определяться временем задержки τ=2R/C. В этом случае будет обрабатываться и накапливаться сигнал только с одного участка дальности, на котором располагаются обе цели (см. фиг.1). Внутриимпульсная обработка отраженного сигнала позволяет получить доплеровский спектр, в котором разрешение по скорости составит ΔV=λ(2·τи1)=13.3м/c. По этой причине обе цели в доплеровском спектре дадут два различных максимума, находящихся на соседних доплеровских частотах, фиг.2б. Однако, исходя только из спектра, трудно указать, какой цели соответствует каждый максимум, лишь с точностью до 45 км можно указать расположение целей.
Для уточнения положения целей по дальности и по скорости проводится зондирование по той же трассе короткими импульсами длительностью τи2=2*10-7 с периодом повторения τповт2=10-3 с, обеспечивающей однозначное определение дальности до 150 км. Такая длительность импульса τи2 обеспечивает разрешение по дальности ΔR=cτи2/2=15 м. На фиг.2а сплошными прямоугольниками представлен пример отражаемости зарегистрированной в двух элементах объема, находящихся на дальности R2=100530м±15м и дальности R3=100560м±15м, которые различаются на 30 м. Очевидно, что цель 2, имеющая большую отражаемость, даст на доплеровском спектре большее значение спектральной плотности. Поэтому, даже по одному циклу измерений, проводя корреляцию между отражаемостью и спектральной плотностью доплеровского спектра, можно утверждать, что цель 1 имеет дальность R1=100530м±15м и проекцию скорости V1=400м/c±8м/c, а цель 2 имеет дальность R2=100560м±15м и проекцию скорости V2=413м/c±8м/c.
На фиг.2а пунктиром показаны значения отражаемости через 0,2 секунды. За это время цели сместились в другие пространственные ячейки и изменили отражаемость. Это происходит, например, за счет незначительного изменения ракурса зондирования и интерференции обратно рассеянного когерентного сигнала у сложных целей. Скорости целей за время 0.2 с практически не изменяются, поэтому в спектре на фиг.2б лишь изменится спектральная плотность сигналов. Корреляционная обработка между отражаемостью σ(Rj) и спектральной плотностью S(Vi) должна проводиться с учетом смещения цели с известной скоростью Vi по трассе. Если циклы измерений проводятся в моменты времени t1, t2,…tn, а сравнение проводится между отражаемостью цели, расположенной при начальной дальности Rj, и спектральной плотностью на частоте Vi, то ряд Xk значений отражаемости с учетом смещения цели представляет собой Xk(Rj)=σ(Rj+Vj·(tk-tq)). Ряд значений спектральной плотности Yk представляет собой спектральную плотность на заданной частоте Vi в различные моменты времени Yk=S(Vi, tk). Для каждой дальности Rj, где в начальный момент времени t1 зарегистрирована цель, формируется функция корреляции (ковариация)

где величины 

Второй пример повышения разрешения по скорости и дальности относится к измерению профиля ветра в атмосфере с помощью когерентного CO2 лидара, длина волны которого составляет 10 мкм. При заданной точности измерения ветра ΔV=0,8 м/c длительность импульса должна составлять τи1=λ/(2·ΔV)=6*10-6 c, при этом разрешение по дальности составит ΔR1=c τи1/2=900 м. Такое разрешение по дальности не удовлетворяет требованиям, предъявляемым к метеорологическим лидарам.
На фиг.3 представлен пример повышения разрешения по дальности в такой системе. Пусть дальность зондирования составляет 6 км, тогда период повторения импульсов Тповт может составлять 40 мкс. На первом этапе измерений проводится зондирование трассы пачкой из 100 длинных импульсов длительностью τи1=6*10-6 с и периодом повторения Тповт.=40 мкс. Этот процесс занимает 4 мс. При этом регистрируются доплеровские спектры S(Vi), усредненные по интервалу ΔR1=cτи1/2=900м. Положение интервала на трассе определяется задержкой сигнала по отношению к стробу запуска импульса. На фиг.3 показано одно из расположений импульса протяженностью ΔR1 на трассе, на примере которого мы рассмотрим методы повышения разрешения. Затем проводится зондирование по той же трассе пачкой из 100 коротких импульсов длительностью τи2=10-6 с и периодом повторения Тповт.=40 мкс, которые обеспечивают измерение отражаемости σ(Rj) вдоль длинного 900-метрового импульса с разрешением по дальности ΔR2=150 м. Этот процесс также занимает 4 мс. Полный цикл измерений составит 8 мс. При этом участок 900 м разделяется на 6 коротких участков R1, R2,…R6, каждый протяженностью 150 м. В приведенном примере проекция скорости ветра уменьшается с дальностью и меняет свой знак в пределах длинного импульса. Поперечное сечение лазерного луча на дальностях работы в несколько километров обычно имеет масштаб 0,5-1 м, поэтому смена рассеивателей при типичной скорости ветра 5-10 м/с происходит за 0,1-0,2 с. С такой периодичностью проводятся следующие циклы измерений. От цикла к циклу скорость ветра не изменяется (время коррляции поля ветра обычно составляет от нескольких дсятков секунд до десятков минут), поэтому положение спектральных составляющих в доплеровском спектре S(Vi) не изменится, а лишь изменится спектральная плотность за счет смены рассеивателей в зондируемом объеме. На фиг.4а представлен пример отражаемости σ(Ri, tk), зарегистрированной в моменты времени k-го цикла tk на шести интервалах дальности R1,R2,…R6, каждый протяженностью ΔR2. На каждом интервале дальности сплошным, заштрихованным и пунктирным прямоугольниками представлены по 3 значения отражаемости, полученные для трех циклов измерений, разделенных по времени на 0,2 с. Изменение отражаемости во времени происходит за счет смены рассеивателей в зондируемом объеме и их неоднородного распределения в пространстве. На фиг.4б в виде сплошных вертикальных отрезков показан доплеровский спектр обратно рассеянного сигнала, полученного одновременно от всех шести интервалов дальности при посылке длинных импульсов. Жирными отрезками и пунктирными отрезками показаны спектры, полученные в последующие моменты времени. На каждой частоте представлены три отрезка, соответствующие трем моментам времени. Переключение режима работы с длинных на короткие импульсы происходит за время, много меньшее чем время корреляции принимаемых сигналов, так что три доплеровские спектра на фиг.4б соответствуют трем профилям отражаемости, показанным на фиг.4а.
Для определения проекции скорости, которая соответствует каждому j-му элементу дальности Rj, проводится корреляционная обработка отражаемости σ(Rj ,tk) и спектральной плотности S(Vj, tk) и определяется коэффициент взаимной корреляции K(Rj, Vi)

где черта над σ и S означает усреднение по всем циклам измерений, проведенным в моменты времени tk.
Значение проекции скорости Vi, при котором достигается максимум коэффициента корреляции, и будет искомой скоростью на Rj интервале дальности. Так определяют проекции скорости ветра на всех элементах дальности.
В таблице 1 приведена матрица коэффициентов корреляции, расчитанная всего для трех циклов, представленных на фиг.4. Из таблицы видно, что на дальности R1 максимальный коэффициент корреляции соответствует проекции скорости, равной минус 3 м/с, а на дальности R4 проекция скорости равна 0 м/с, что полностью соответствует искомому профилю. Избирательность функции корреляции и устойчивость к погрешностям измерений и шумам возрастает с увеличением количества циклов измерений [1].
Предложенный способ позволяет улучшить пространственное разрешение и разрешение по скорости за счет последовательного использования длинных импульсов и коротких импульсов. В оптике способ позволяет работать на более длинных волнах, что облегчает когерентную внутриимпульсную обработку отраженных сигналов. В радиодиапазоне способ позволяет использовать не координатные методы определения скоростей целей, а более точные методы определения скоростей целей при внутриимпульсной когерентной обработке. Рассмотренный способ может найти применение и в акустике.
Литература
1. Стерлядкин В.В. Корреляционно-доплеровская реконструкция поля скоростей. Известия АН СССР, сер. Физика атмосферы и океана. Т.ЗО, №5, 1994, с.623-629.
2. Стерлядкин В.В. Способ определения поля скоростей. Патент РФ №2032180. 1995 г.
3. Смалихо И.Н., Рам Ш. Измерения когерентными доплеровскими лидарами параметров самолетных вихрей // Оптика атмосферы и океана. 2008. Т.21, №11. С.977-992.

Изобретение относится к дистанционному зондированию пространства для определения дальности и скорости рассеивателей. Достигаемый технический результат - повышение разрешения по дальности и скорости рассеивателей. Указанный результат достигается за счет того, что первоначально излучают длинные импульсы, регистрируют доплеровский спектр отраженного сигнала на длинном участке траектории зондирования с высоким разрешением по скорости, затем по той же траектории излучают короткие импульсы, регистрируют профиль интенсивности отраженного сигнала вдоль длинного участка, а по корреляции между интенсивностью отраженного сигнала вдоль длинного участка и спектральной плотностью доплеровского спектра определяют проекции скоростей рассеивателей вдоль длинного участка. Для повышения надежности измерений цикл измерений повторяют с периодичностью смены рассеивателей в зондируемом объеме или с периодичностью изменения отражаемости рассеивателей, а корреляционные характеристики накапливают. 1 з.п. ф-лы, 4 ил., 1 табл.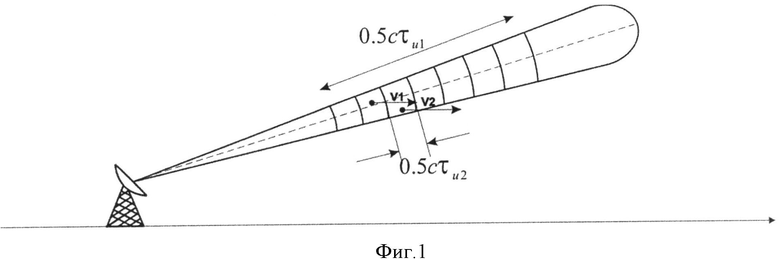
1. Способ повышения разрешения по скорости и дальности рассеивателей для импульсных доплеровских систем, в котором излучают импульсы зондирующего излучения, по задержке отраженного сигнала определяют дальность рассеивателей, а по доплеровскому спектру отраженного сигнала, полученного при когерентной обработке внутри импульса, определяют проекции скоростей рассеивателей, отличающийся тем, что первоначально излучают длинные импульсы, регистрируют доплеровский спектр отраженного сигнала на длинном участке траектории зондирования с высоким разрешением по скорости, затем по той же траектории излучают короткие импульсы, регистрируют профиль интенсивности отраженного сигнала вдоль длинного участка, а по корреляции между интенсивностью отраженного сигнала вдоль длинного участка и спектральной плотностью доплеровского спектра определяют проекции скоростей рассеивателей вдоль длинного участка.
2. Способ по п.1, отличающийся тем, что цикл измерений повторяют с периодичностью смены рассивателей в зондируемом объеме или с периодичностью изменения отражаемости рассеивателей, а корреляционные характеристики накапливают.
| СМАЛИХО И.Н | |||
| Измерения когерентными доплеровскими лидарами параметров самолетных вихрей | |||
| Оптика атмосферы и океана | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| RU 2058565 C1, 20.04.1996 | |||
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ | 2005 |
|
RU2296346C2 |
| US 5442359 A, 15.08.1995 | |||
| СПОСОБ ПРОГНОЗИРОВАНИЯ СВОЕВРЕМЕННОГО РОДОРАЗРЕШЕНИЯ ПРИ ЗАДЕРЖКЕ ВНУТРИУТРОБНОГО РАЗВИТИЯ | 2019 |
|
RU2736161C1 |
| US 4338603 A, 26.07.1982 | |||
| WO 2008080739 A1, 10.07.2008. | |||

