Изобретение относится к технике первичных радиолокационных измерений и, в частности, к технологиям дальностных измерений импульсно-доплеровских радиолокационных станций (РЛС) наземного (надводного) базирования при обнаружении движущихся целей на фоне узкополосных пассивных помех (ПП) и, в первую очередь, на фоне интенсивных отражений от подстилающей земной (водной) поверхности, местных предметов и малоподвижных метеообразований. Область применения предлагаемого способа - радиолокационные информационно-измерительные системы ИД типа различного назначения.
Широко известны и востребованы в практике создания радиолокационных информационно-измерительных средств, комплексов и систем импульсно-доплеровские радиолокационные станции (ИД РЛС), которые характеризуются неоднозначностью первичных измерений дальности обнаруженных целей [1…4]. Традиционно для устранения присущей для данного класса РЛС неоднозначности первичных измерений дальности требуется, в ущерб оперативности первичной дальнометрии целей, производить многократное (три и более число раз) зондирование обнаруженной цели квазинепрерывными сигналами (КНС) различной частоты повторения импульсов (ЧПИ) с последующей совместной обработкой измерений неоднозначных временных задержек целевых эхо-сигналов. Отмеченный недостаток особо проявляется при работе в условиях не разрешения по угловым координатам и скорости группы рассредоточенных по дальности целей, когда ограничены возможности межзондового отождествления отметок целей, сформированных в нескольких циклах (тактах) их зондирования сигналами разной ЧПИ. Для повышения оперативности первичной дальнометрии обнаруживаемых целей в [1…4] рассмотрен способ, основанный на использовании КНС с линейной частотной модуляцией (ЛЧМ) несущей частоты. Этот способ характеризуется недостаточной помехоустойчивостью в условиях маскирования целей ПП высокой интенсивности и, в первую очередь, при работе по целям с приземными трассами прохождения локационных сигналов. Отмеченный недостаток усугубляет то обстоятельство, что при использовании КНС маскирование стробируемых целевых эхо-сигналов происходит отражениями от помехоформирующих образований естественного и (или) искусственного происхождения, распределенных не только в окрестности визируемой цели, а по всей дистанции зондируемого пространства.
В качестве аналогов приняты рассмотренные в [3, 4] методы двухэтапной первичной дальнометрии обнаруженных ИД РЛС целей с однозначной оценкой в обнаружительном цикле зондирования их радиальной скорости (доплеровских сдвигов целевых эхо-сигналов). Указанные методы основаны на проведении непосредственно вслед за результативным циклом обнаружения измерительного дальномерного цикла (такта) зондирования обнаруженных целей квазинепрерывным сигналом (КНС) с той же ЧПИ, но с дополнительным вводом линейной частотной модуляции (ЛЧМ) несущей частоты КНС. Ввод ЛЧМ несущей КНС позволяет реализовать первичные дальностные измерения при условии радиовидимости целей на фоне ПП и доступности получения однозначных оценок доплеровских сдвигов обнаруженных целевых эхо-сигналов, сформированных на этапе обнаружения целей и в дополнительном измерительном цикле зондирования. Согласно этим методам принятые в измерительном цикле зондирования эхо-сигналы после частотной демодуляции подвергаются многоканальной время-частотной корреляционно-фильтровой обработке с оценкой частотных сдвигов целевых эхо-сигналов, определяемых их скоростным доплеровским сдвигом и псевдодоплеровским сдвигом, обусловленным наличием временной задержки целевых эхо-сигналов с ЛЧМ несущей КНС.
Как отмечено в [4], рассмотренные методы обладают невысокой помехоустойчивостью, а также наличием непросматриваемых «слепых» участков дальности не только по причине бланкирования приемника на время работы передатчика ИД РЛС, но и по причине маскирующего влияния ПП в пределах «слепых» частотных участков (частотных «мертвых» зон) анализируемого диапазона доплеровских и псевдодоплеровских частотных сдвигов целевых эхо-сигналов (целевой эхо-сигнал). Это вынуждает производить дополнительные зондирования обнаруженных целей, что, как следствие, снижает оперативность первичной дальнометрии целей.
В [5] рассмотрен принятый в качестве прототипа метод двухэтапной первичной дальнометрии обнаруженной цели с однозначной оценкой в обнаружительном цикле (такте) зондирования ее радиальной скорости (доплеровского сдвига) и неоднозначной дальности (временной задержки). Указанный метод также основан на проведении непосредственно вслед за результативным циклом обнаружения измерительного дальномерного цикла зондирования обнаруженной цели с использованием КНС с параметрами (ЧПИ и крутизной ЛЧМ несущей частоты), определяемых доплеровским сдвигом обнаруженного целевого эхо-сигнала (ЦЭС). Согласно этому методу принятую аддитивную смесь целевого и помеховых эхо-сигналов в измерительном цикле зондирования после частотной демодуляции подвергаются многоканальной корреляционно-фильтровой обработке в расширенной частотной полосе на равно-интервальном ряде частот с однозначной оценкой частотного сдвига повторно обнаруженного ЦЭС.
При использовании КНС малой скважности, что особо характерно для ИД РЛС с активными фазированными антенными решетками либо твердотельными радиопередающими устройствами, для которых характерны ограниченные возможности использования КНС с высокой скважностью зондирующих посылок (свыше 10…15 единиц) [6], указанный метод не позволяет реализовать потенциальные возможности скоростной селекции целей на фоне ПП рассматриваемого типа. Это обусловлено далее рассмотренным фактором скашивания (наклонения) локальных максимумов ФН КНС при вводе ЛЧМ его несущей частоты [5, 7]. Негативное проявление отмеченного фактора обуславливает расширение помеховых максимумов энергетического спектра ПП на выходе селектора движущихся целей (СДЦ) с одновременным сужением свободной от ПП поисковой частотной полосы. Как следствие:
возрастает маскирующее влияние ПП на ЦЭС при его допоиске и повторном обнаружении в измерительном цикле зондирования, так как сокращается его частотная отстройка от скатных участков огибающей спектральной плотности недокомпенсированной ПП;
ужесточается требование к позиционированию доплеровской частоты ЦЭС в центральной области поисковой частотной полосы, выполнение которого с использованием низкоточных единичных измерений доплеровских сдвигов ЦЭС на этапе обнаружения целей затруднительно.
Технической задачей, решаемой предлагаемым способом, является повышение помехоустойчивости ИД РЛС при первичной дальнометрии одиночных целей либо не разрешаемых по углу и скорости распределенных по дальности группы целей на фоне одномодовой ПП при использовании ИД РЛС зондирующих посылок малой скважности.
Техническим результатом, обеспечивающим решение поставленной технической задачи, является минимизация маскирования ЦЭС помеховыми, обусловленного скашиванием локальных максимумов ФН КНС малой скважности при использовании ЛЧМ его несущей частоты. Отмеченный технический результат достигается применением:
вспомогательной внутриимпульсной линейной частотной модуляции излучаемых импульсов КНС, крутизна (скорость) которой существенно превосходит крутизну основной ЛЧМ модуляции несущей частоты по всей пачке КНИ;
внутриимпульсной косинус-квадратной амплитудной модуляции излучаемых импульсов КНС;
косинус-квадратной весовой обработки принимаемых эхо-сигналов при бланкировании приемника ИД РЛС на время излучения зондирующих посылок;
внутриимпульсной косинус-квадратной весовой обработки принимаемых эхо-сигналов.
Применение КНС с указанной внутриимпульсной амплитудной и вспомогательной частотной модуляцией, а также дополнительно введенных в процесс приема и обработки аддитивной смеси целевых и помеховых эхо-сигналов новых операций позволяет минимизировать деструктивное скашивание локальных максимумов их ФН до пренебрежимо малого уровня, а также повысить разрешающую способность ИД РЛС по дальности.
Указанный технический результат и, как следствие, решение поставленной технической задачи достигается тем, что на подготовительном временном интервале работы ИД РЛС производят снятие помеховой карты мешающих отражений с оценкой в каждом угловом направлении рабочего сектора энергетического дальностно-скоростного распределения ПП, по данным помеховой карты определяют помехонасыщенные сектора с узкополосным энергетическим спектром ПП и уточняют параметры применяемых в этих секторах зондирующих локационных сигналов и характеристик их приема и обработки, в процессе поиска и обнаружения целей в угловых направлениях, характеризуемых наличием интенсивных ПП, n-кратно формируют и направленно излучают регулярные КНС различной высокой ЧПИ, принимают в паузах работы передатчика РЛС целевые и помеховые эхо-сигналы с последующей их многоканальной по дальности и скорости корреляционно-фильтровой время-частотной обработкой, в результативном цикле цели на фоне узкополосных ПП производят измерения время-частотных параметров обнаруженного ЦЭС с оценкой его однозначного доплеровского и неоднозначного временного сдвигов, затем производят дальностно-измерительный цикл зондирования обнаруженной цели с использованием КНС с ЛЧМ несущей частоты, причем в дальностно-измерительном цикле зондирования принимаемую аддитивную смесь целевых и помеховых эхо-сигналов подвергают частотной демодуляции и многоканальной время-частотной корреляционно-фильтровой обработке, повторно обнаруживают целевой эхо-сигнал (ЦЭС), измеряют уровни мощности превысивших порог обнаружения локальных максимумов обнаруженного ЦЭС, а также его однозначный частотный и неоднозначный временной сдвиг, после чего производят идентификацию главного максимума обнаруженного ЦЭС и оценку его однозначного временного сдвига с последующим его пересчетом в оценку дальности обнаруженной цели отличающийся тем, что в измерительном цикле зондирования обнаруженной цели при формировании излучаемых радиоимпульсов КНС в соответствии с (1) производят их внутриимпульсную амплитудную косинус-квадратную и вспомогательную линейную частотную модуляцию, а в процессе приема и обработки эхо-сигналов последние после частотной демодуляции с использованием гетеродинного сигнала с линейной частотной модуляцией, согласованной с основной линейной частотной модуляцией всей пачки импульсов излучаемого КНС, подвергают согласно (2) внутрипериодному косинус-квадратному весовому бланкированию и далее, согласно (3), внутриимпульсной косинус-квадратной весовой обработке и фильтровому сжатию импульсов с вспомогательной ЛЧМ модуляцией с последующей их многоканальной время-частотной обработкой



где Us(t) - излучаемый ИД РЛС КНС с внутриимпульсной косинус-квадратной амплитудной и ЛЧМ несущей частоты;
UБ(t) - функция временной вариации коэффициента передачи схемы весового бланкирования недокомпенсированных циркулятором излучаемых импульсов КНС и принимаемых эхо-сигналов;
 - ректанг-функция для представления периодической последовательности импульсов прямоугольной формы единичной высоты и длительностью τи.
- ректанг-функция для представления периодической последовательности импульсов прямоугольной формы единичной высоты и длительностью τи.
где k - нумерация импульсов КНС;
τИ - длительность импульсов КНС;
N - половинное число периодов следования импульсов КНС во временном окне его время-частотной обработки;
ƒНО - несущая частота излучаемого КНС;
βП - крутизна ЛЧМ несущей частоты всей пачки импульсов КНС без учета его дополнительной внутриимпульсной частотной модуляции;
βИ - крутизна дополнительной внутриимпульсной модуляции несущей частоты КНС без учета ЛЧМ несущей частоты всей пачки импульсов КНС;

где ТП, FП - соответственно период и ЧПИ КНС;
 - оценка однозначно измеренного доплеровского сдвига ЦЭС, полученная в обнаружитель ном цикле зондирования;
- оценка однозначно измеренного доплеровского сдвига ЦЭС, полученная в обнаружитель ном цикле зондирования;
р=1, 2, 3, … - целочисленный параметр выбора ЧПИ КНС;
hп - скважность излучаемой пачки импульсов КНС;
 - скважность импульсов КНС после их сжатия, при которой обеспечивается допустимое снижение эффективности СДЦ с вводом ЛЧМ несущей частоты КНС;
- скважность импульсов КНС после их сжатия, при которой обеспечивается допустимое снижение эффективности СДЦ с вводом ЛЧМ несущей частоты КНС;
ϕН - начальная фаза высокочастотного заполнения излучаемого КНС.
xфс(t) - сигнал на выходе фильтра сжатия ЛЧМ импульсов КНС;
x(t') - сигнал на входе фильтра сжатия ЛЧМ импульсов КНС;
 - зеркальная импульсная характеристика фильтра сжатия ЛЧМ импульсов КНС
- зеркальная импульсная характеристика фильтра сжатия ЛЧМ импульсов КНС
ΨН - начальная фаза принятого КНС на второй промежуточной частоте.
Введение в прототип отмеченных выше отличий позволяет в измерительных циклах зондирования практически исключить скашивание локальных максимумов функции неопределенности (ФН) КНС. Как следствие, в частотной зоне допоиска предварительно обнаруженных и оцененных по скорости радиального перемещения целей обеспечивается восстановление эффективности подавления ПП с сохранением необходимых для однозначной дальнометрии целей эффективности их допоиска в измерительном цикле зондирования, возможности временного разрешения и выделения главных максимумов профильтрованных ЦЭС.
Предлагаемое техническое нововведение позволяет достичь указанный выше технический результат, состоящий в повышении помехоустойчивости ИД РЛС при решении задачи первичной дальнометрии одиночных целей либо не разрешаемых по угловым координатам и скорости распределенных по дальности групповых целей с использованием КНС малой скважности.
Изобретение поясняется рисунками, представленными на фиг. 1…8, раскрывающими принципы параметрической оптимизации КНС, физику и закономерности линейно-сдвиговой деформации ФН КНС (скашивания их локальных максимумов) при вводе ЛЧМ несущей частоты.
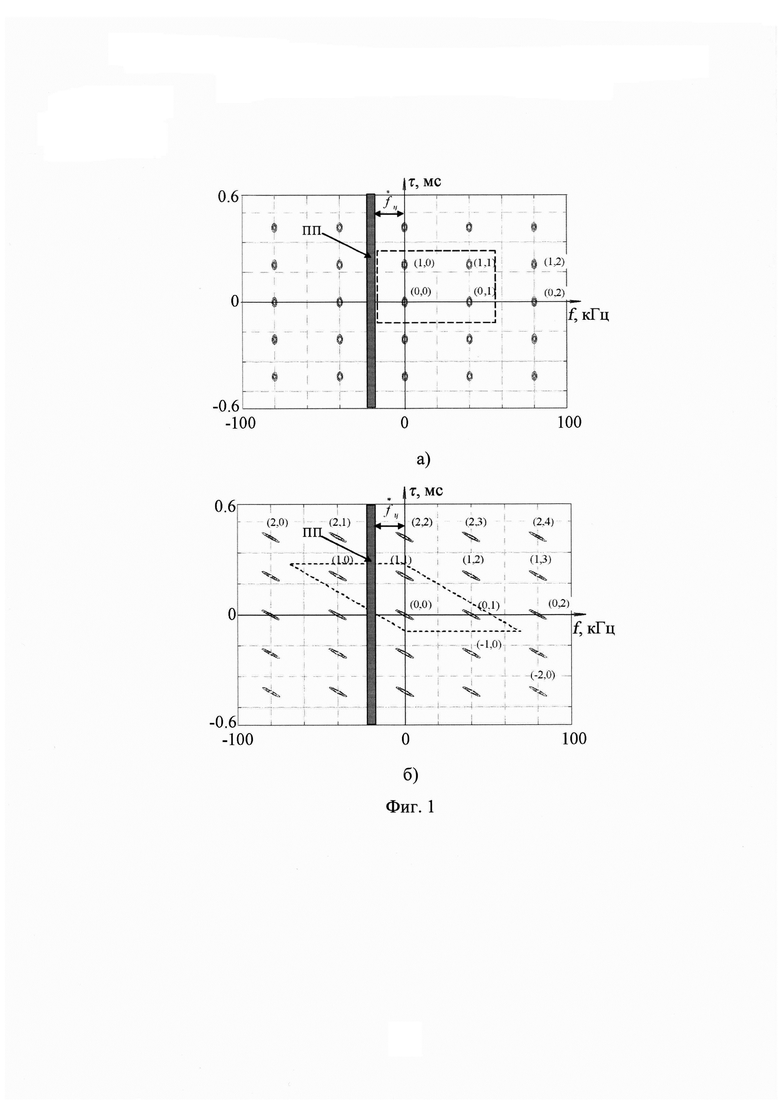
На фиг. 1 приведены контуры областей высокой корреляции модифицированной двумерной функции неопределенности КНС с оптимизированными в соответствии с прототипом [5] параметрами модуляции для различных значений скважности импульсов. Под модифицированной функцией неопределенности КНС следует понимать функцию взаимной корреляции ограниченного по времени исходного КНС с варьируемым время-частотным сдвигом и его копии с фиксированным нулевым время-частотным сдвигом и неограниченным числом импульсов [4].

где Uкнс(t) - регулярная последовательность импульсов КНС не ограниченной длительности;
N - половинное число периодов следования импульсов КНС во временном окне взаимной корреляционной (время-частотной) обработки КНС;
τ - временной сдвиг КНС относительно его опорной копии.
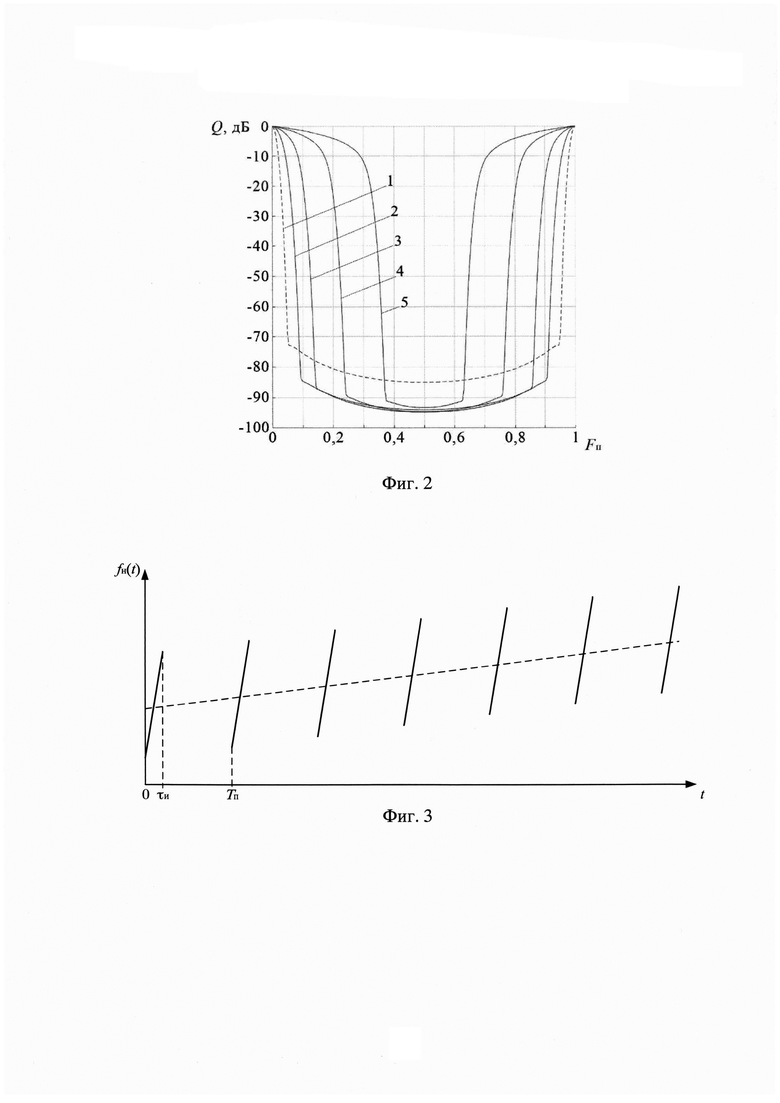
На фиг. 2 приведены графики функции, характеризующей реализуемую ИД РЛС частотно-скоростную избирательность (графики Q-функций КНС [8, 9]) при N=100, длительности пачки 5 мс и весовой обработке по пачке Дольфа-Чебышева (-80 дБ);
На фиг. 2 цифрами обозначены:
1 - Q-функция КНС со скважностью h=20 в отсутствии ЛЧМ модуляции;
2…5 - Q-функции КНС с ЛЧМ несущей при использовании оптимизированного в соответствии с прототипом КНС рассматриваемого типа при скважности импульсов КНС h=20, 10, 5 и 3 соответственно.
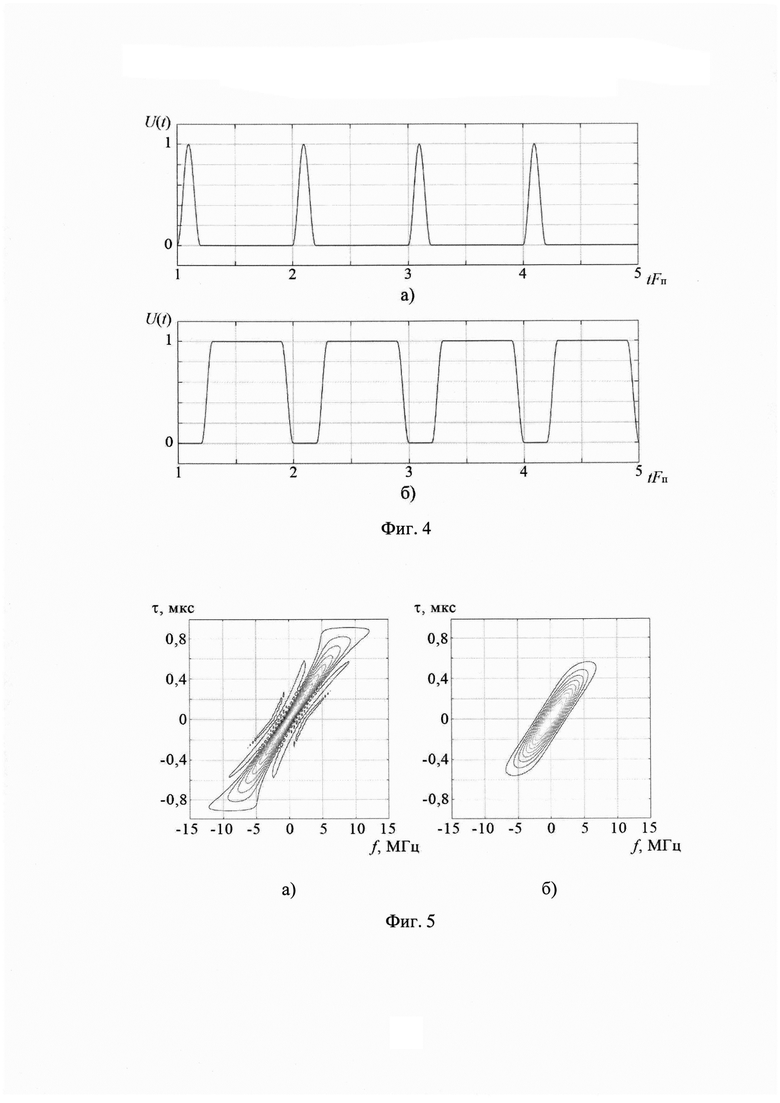
На фиг. 3 приведен линейный закон основной линейной частотной модуляции (ЛЧМ) всей пачки радиоимпульсов КНС (пунктир) и вспомогательной внутриимпульсной ЛЧМ (сплошная линия).
На фиг. 4 приведены графики весовых функций, в соответствии с которыми производится амплитудная (весовая) косинус-квадратная модуляция импульсов КНС в процессе их излучения в эфир (фиг. 4а), при внутрипериодном весовом бланкировании зондирующих посылок и принимаемых эхо-сигналов (фиг. 4б) и, наконец, при косинус-квадратной весовой обработке импульсов принимаемых эхо-сигналов (фиг. 4г).
На фиг. 5 приведены контуры областей высокой корреляции двумерной ФН одиночного радиоимпульса длительностью 1 мкс с ЛЧМ при βИ=1013 Гц/с в отсутствии (фиг. 5а) и при наличии внутриимпульсной косинус-квадратной весовой обработки (фиг. 5б).
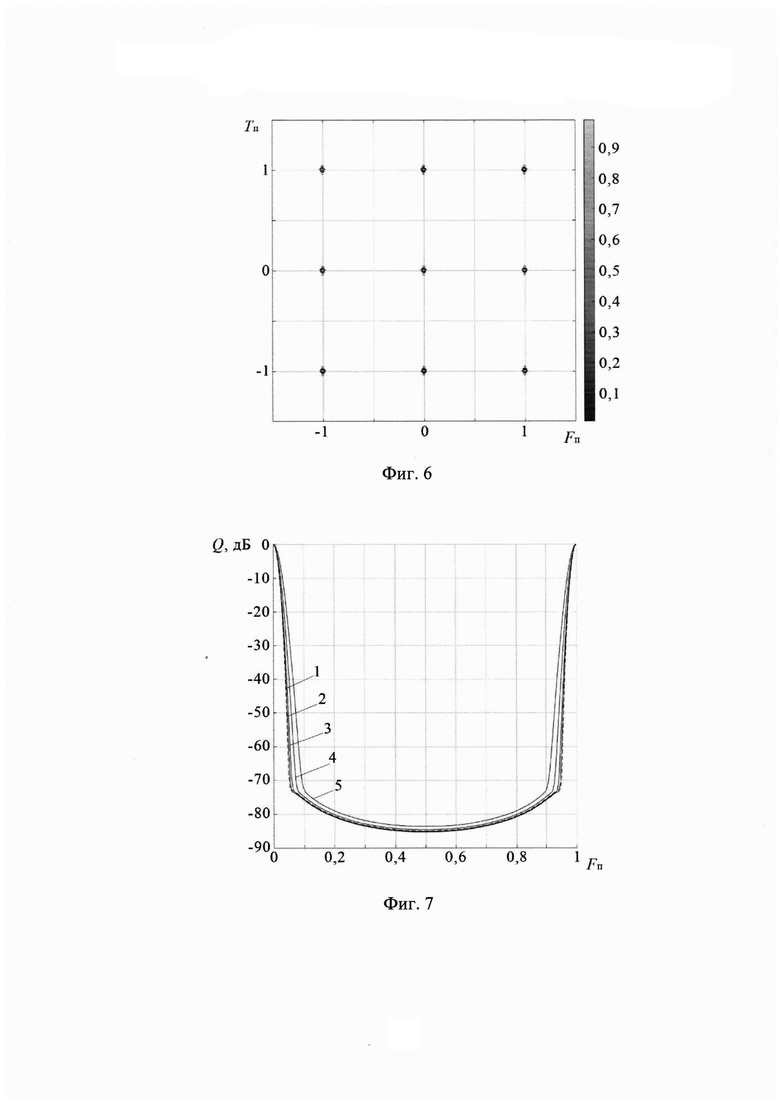
На фиг. 6 приведены результаты компьютерных расчетов модифицированной ФН КНС, иллюстрирующей эффект нейтрализации деструктивного скашивания локальных максимумов ФН КНС при использовании внутриимпульсной амплитудно-весовой и вспомогательной высокоскоростной линейной частотной модуляции несущей частоты КНС при βИ=1013 Гц/с, N=100, h=5, Ts=5 мс при применении весовой обработке по пачке Дольфа-Чебышева (-80 дБ).
На фиг. 7 приведены графики функции, характеризующей реализуемую ИД РЛС частотно-скоростную избирательность (графики Q-функций КНС [8, 9]) при N=100, длительности пачки 5 мс, скважности импульсов КНС h=20, 10, 5 и 3 соответственно, внутриимпульсной амплитудной модуляции по косинус-квадратному закону и весовой обработке по пачке Дольфа-Чебышева (-80 дБ).
На фиг. 7 цифрами обозначены:
1 - Q-функция КНС
2…5 - Q-функции КНС с вспомогательной высокоскоростной внутриимпульсной ЛЧМ несущей βИ=1013 Гц/с, при использовании оптимизированного в соответствии с прототипом КНС рассматриваемого типа также при скважности h=20, 10, 5 и 3 соответственно.
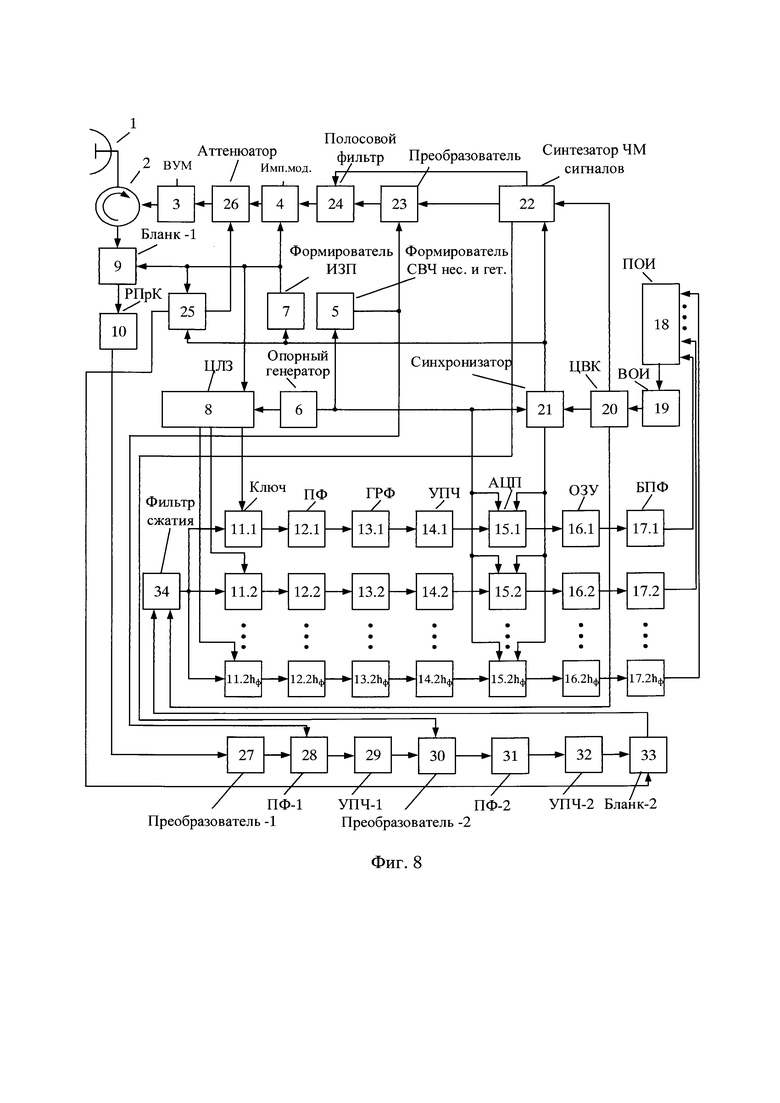
На фиг. 8 приведена укрупненная блок-схема ИД РЛС, в которой предусмотрено использование КНС с внутриимпульсной весовой и вспомогательной высокоскоростной ЛЧМ несущей частоты.
На фиг. 8 приняты следующие числовые обозначения функциональных элементов ИД РЛС, которые, за исключением дополнительно введенных новых элементов, соответствуют прототипу:
1 - антенна;
2 - циркулятор;
3 - оконечный выходной СВЧ усилитель мощности (ВУМ) зондирующих посылок;
4 - импульсный модулятор;
5 - формирователь монохромного СВЧ гетеродинного сигнала;
6 - высокостабильный генератор опорной частоты;
7 - формирователь импульсов запуска передатчика (ИЗП);
8 - многоотводная цифровая линия задержки (ЦЛЗ);
9 - схема бланкирования радиоприемника на время излучения зондирующих посылок КНС;
10 - широкополосный усилитель высокой частоты (УВЧ);
11.1 - 11.2hФ - схемы стробирования принимаемых эхо-сигналов, управляемые импульсами прямоугольной формы;
12.1…12.2hФ - полосно-пропускающие фильтры (ППФ) второй промежуточной частоты (ПЧ);
13.1…13.2hФ - режекторные фильтры (РФ) сигналов нулевой доплеровской частоты;
14.1…14.2hФ - узкополосные главные усилители сигналов второй промежуточной частоты (УПЧ);
15.1…15.2hФ - аналого-цифровые преобразователи (АЦП);
16.1…16.2hФ - буферные оперативные запоминающие устройства (ОЗУ);
17.1…17.2hФ - сигнальные процессоры быстрого преобразования Фурье (БПФ);
18 - блок первичной обработки информации (ПОИ);
19 - блок вторичной обработки информации (ВОИ);
20 - цифровой вычислительный комплекс (ЦВК);
21 - синхронизатор;
22 - формирователь частотно-модулированного КНС на первой промежуточной частоте приемника ИД РЛС и ЛЧМ гетеродинного сигнала;
23 - повышающий частотный преобразователь в составе передатчика;
24 - перестраиваемый полосно-пропускающий фильтр (ППФ);
25 - цифровой синтезатор сигналов косинус квадратной амплитудно-весовой внутриимпульсной модуляции КНС;
26 - цифровой амплитудный модулятор (многоразрядный цифровой аттенюатор) в составе передатчика ИД РЛС;
27 - первый частотный преобразователь в составе приемника;
28 - полосовой фильтр первой промежуточной частоты;
29 - усилитель сигналов первой промежуточной частоты;
30 - второй преобразователь в составе приемника;
31 - полосовой фильтр второй промежуточной частоты;
32 - усилитель сигналов второй промежуточной частоты;
33 - схема вспомогательного весового бланкирования излучаемых зондирующих посылок и принимаемых эхо-сигналов;
34 - фильтр сжатия ЛЧМ импульсов КНС с учетом внутриимпульсной косинус-квадратной весовой обработки.
Решение поставленной технической задачи обеспечивается повышением скважности подвергаемых стробированию импульсов профильтрованного КНС за счет применения выше перечисленных следующих операций:
ввода в излучаемый КНС с основной линейной, в соответствии с прототипом, модуляцией несущей частоты всей пачки радиоимпульсов внутриимпульсной амплитудной косинус-квадратной и вспомогательной ЛЧМ высокоскоростной ЛЧМ;
вспомогательного внутрипериодного также косинус-квадратного весового бланкирования принимаемых эхо-сигналов;
внутриимпульсной косинус-квадратной весовой обработки и фильтрового сжатия ЛЧМ импульсов принимаемых эхо-сигналов после их частотной демодуляции;
стробирования подвергнутых фильтровому сжатию ЛЧМ импульсов принимаемых эхо-сигналов с использованием сигналов стробирования традиционной прямоугольной формы.
Физика процесса нейтрализации негативного влияния эффекта скашивания базируется на известных положениях теории синтеза, обработки и время-частотного анализа локационных сигналов.
На фиг. 1, 2 приведены графики, поясняющие деструктивное влияние фактора скашивания локальных максимумов модифицированной ФН КНС с ЛЧМ на помехоустойчивость ИД РЛС в процессе первичной дальнометрии обнаруживаемых целей иллюстрирующие:
наклонно-сдвиговую реконфигурацию двумерной ФН КНС с оптимизированными в соответствии с прототипом параметрами ЛЧМ модуляции КНС для различных значений скважности его импульсов;
динамику ухудшения качества частотно - скоростной селекции ЦЭС на фоне ПП при использовании КНС рассматриваемого типа также для различных значений скважности в отсутствии (сплошная) и при наличии ЛЧМ их несущей (пунктирная).
Из приведенных на фиг. 1, 2 графиков следует, что с уменьшением скважности КНС, сопровождаемое увеличением длительности импульсов при фиксированном их периоде, происходит:
сокращение просвета между квазиленточной помехонасыщенной время-частотной областью и квазиленточной областью локализации скошенных локальных максимумов ФН КНС;
сужение квазиленточной области, которую не пересекают скошенные локальные максимумы ФН КНС.
По этой причине происходит аналогичное сужение и уменьшение глубины провальной области Q-функции [8, 9], которое объясняет причину снижения эффективности СДЦ. Отсюда следует недоступная для прототипа обеспеченность равнозначного качества доплеровской селекции целевых эхо-сигналов на фоне помеховых отражений в отсутствии и при наличии ЛЧМ несущей КНС при малой скважности менее 6…8 единиц.
По результатам анализа возможных решений задачи устранения отмеченного снижения качества СДЦ установлено, что ее эффективным решением является максимизация скважности подвергаемых корреляционно-фильтровой обработке импульсов принимаемых эхо-сигналов. Такая возможность представляется при вводе в прототип операций вспомогательной высокоскоростной внутриимпульсной ЛЧМ и внутриимпульсного фильтрового сжатия принимаемых эхо-сигналов после их частотной демодуляции. Однако, как показали числовые модельные эксперименты, для устранения рассматриваемых деструктивных процессов ввод указанных операций недостаточен. Это обусловлено тем, что в процессе бланкирования и стробирования принимаемых сигналов значительная часть помеховых эхо-сигналов подвержена укорачиванию (усечению) их длительности. Процесс укорочения длительности импульсов КНС сопровождается двумя деструктивными явлениями:
расфокусированием сигналов сжатия ЛЧМ импульсов КНС;
частотного сдвига локальных максимумов сигналов сжатия пропорционально длительности бланкированной (усеченной) части исходных принимаемых ЛЧМ импульсов КНС.
Последнее обусловлено частотным сдвигом центральной частоты усеченных в процессе бланкирования либо стробирования ЛЧМ импульсов.
Отмеченные деструктивные явления в формализованном и графическом виде широко представлены в [8, 9, 10] при описании двумерной ФН радиоимпульса с ЛЧМ его несущей частоты.
С учетом отмеченных деструктивных явлений, происходящих при укорочении длительности ЛЧМ радиоимпульсов, становится физически очевидным, что для минимизации их негативного влияния на качество СДЦ необходимо предельно уменьшить:
энергетический вес подвергаемых корреляционно-фильтровой обработке усеченных по длительности помеховых эхо-сигналов;
частотный сдвиг центральной частоты (энергетического центра) усеченных по длительности ЛЧМ импульсов после их бланкирования и (или) стробирования;
«растекание» энергетики усеченных по длительности помеховых эхо-сигналов вдоль частотной оси.
Техническая реализация указанных мер возможна с использованием при бланкировании и стробировании импульсов КНС сигналов управления соответствующими схемами не традиционно прямоугольной, а сглаженной косинус-квадратной формы в соответствии с выражениями вида (1) и (2).
Техническая реализация указанных мер возможна с использованием в ИД РЛС в дополнение к основной ЛЧМ несущей частоты КНС дополнительной высокоскоростной внутриимпульсной ЛЧМ КНС в сочетании с внутриимпульсной косинус-квадратной амплитудной модуляции зондирующих посылок в соответствии с выражением вида (1), а в процессе приема и обработки аддитивной смеси целевых и помеховых эхо-сигналов применением:
взамен традиционного внутрипериодного бланкирования эхо-сигналов в ключевом режиме сглаженного косинус-квадратного их бланкирования в соответствии с выражением вида (1);
внутриимпульсной косинус-квадратной весовой обработки и фильтрового сжатия ЛЧМ импульсов принимаемых эхо-сигналов в соответствии с выражением вида (2).
Согласно (1) и (2) и фиг. 4 предлагается взамен импульсов бланкирования и стробирования традиционно прямоугольной формы использовать соответствующие импульсы со скругленным передним и задним фронтами косинус-квадратной формы.
Косинус-квадратное сглаживание усеченных ЛЧМ импульсов КНС при выполнении операций их бланкирования и стробирования обеспечивает наилучшее по критерию минимизации влияния выше упомянутых деструктивных факторов. Данный факт объясняется тем, что, согласно фиг. 5, применение косинус-квадратной весовой обработки ЛЧМ импульсов обеспечивает не только снижение уровня боковых лепестков сигналов их сжатия, но и сокращение области высокой корреляции ФН ЛЧМ импульсов вдоль оси частотных рассогласований.
Эффект применения предлагаемого вида модуляции зондирующих сигналов ИД РЛС и весовой обработки принимаемых эхо-сигналов проиллюстрирован представленными на фиг. 6, 7 результатами числовых расчетов ФН КНС с предлагаемыми характеристиками модуляции и функций частотно - скоростной избирательности ИД РЛС (Q-функции КНС [6]) при использовании КНС рассматриваемого типа для различных значений скважности этих сигналов. На основании представленных расчетов можно заключить о возможности с использованием рассмотренного предложения практически полного восстановления эффективности скоростной селекции целей при применении частотно-модулированных КНС с малой скважностью его импульсов, что свидетельствует о достижении поставленной цели изобретения. Отмеченный положительный эффект достигается ценой усложнения аппаратного и программно-алгоритмического обеспечения ИД РЛС и, в частности, необходимости расширения частотной полосы формирователей зондирующих сигналов и входного высокочастотного приемника, а также повышения канальности матричного приемника.
Адаптированный к реализуемому в прототипе ИД РЛС корреляционно-фильтровому методу приема и обработки локационных сигналов [1…4, 8, 10] рассматриваемый способ первичных дальностных измерений (за исключением подготовительных измерений и обзорно-поисковых рабочих циклов зондирования) характеризуется следующей очередностью последовательно выполняемых операций в измерительном цикле зондирования:
дополнительная внутриимпульсная косинус-квадратная модуляция и вспомогательная также внутриимпульсная высокоскоростная ЛЧМ;
внутрипериодное косинус-квадратное бланкирование приемника ИД РЛС на время излучения зондирующих посылок;
демодуляция КНС с использованием ЛЧМ гетеродинного сигнала промежуточной частоты;
внутриимпульсной косинус-квадратной весовой обработки и фильтрового сжатия ЛЧМ импульсов принимаемых эхо-сигналов;
многоканальное стробирование подвергнутых фильтровому сжатию ЛЧМ импульсов демодулированного КНС с использованием пачек перекрывающихся стробов дальности прямоугольной формы;
внутриканальная (в каждом стробируемом радиоприемном канале (РПрК)) частотная режекция помеховых эхо-сигналов нулевой доплеровской частоты
противопомеховая оконная весовая обработка отрежектированного КНС;
многоканальная доплеровская фильтрация КНС, в процессе которой производится спектральный анализ подвергнутой весовой обработке КНС на выборочном эквидистантном ряде частот;
пороговая обработка и регистрация сигналов превышения первичного энергетического порога, порождаемых локальными максимумами профильтрованных целевых эхо-сигналов и возможными шумо-помеховыми выбросами;
селекция (идентификация) главных максимумов отфильтрованных эхо-сигналов, реализуемая, например, по критерию минимума невязки выходных сигнальных отсчетов в обнаружительном и измерительном циклах зондирования;
оценка частотно-временных сдвигов целевых эхо-сигналов обнаруженных целей, пересчитываемых в искомые оценки дальности до обнаруженных целей.
На фиг. 8 приведена упрощенная версия блок-схемы построения ИД РЛС, скорректированной в соответствии с предлагаемым способом первичной дальнометрии. Принцип построения и функционирования ИД РЛС по приводимой блок-схеме аналогичны рассмотренным в прототипе [5], в котором реализован классический корреляционно-фильтровой метод время-частотной обработки КНС [1…4, 8, 10] за исключением корректировок, связанных с проведением выше рассмотренных операций формирования зондирующих посылок и гетеродинных сигналов, а также операции демодуляции и фильтровой обработки принимаемых эхо-сигналов.
Согласно приведенной блок-схеме ИД РЛС в ее состав входят:
совмещенная на передачу и прием антенна с циркулятором;
подсистема формирования зондирующих посылок (передатчик);
одноканальный высокочастотный приемник с широкой частотной полосой по входу и узкой по выходу;
матричный многоканальный приемник сигналов на промежуточной частоте (ПЧ) с узкой частотной полосой;
линейка цифровых сигнальных процессоров БПФ;
процессоры первичной (ПОИ) и вторичной обработки измерительной информации (ВОИ);
центральный вычислительный комплекс (ЦВК);
вспомогательные элементы для решения задач формирования высокостабильных опорных колебаний и синхронизации процессов совместного функционирования составных элементов ИД РЛС.
К антенне 1 через циркулятор 2 подключены передатчик и входной высокочастотный приемник.
В отличие от прототипа, передатчик содержит ряд новых элементов, позволяющих производить дополнительно введенные операции. В их составе основными являются:
цифровой синтезатор частотно-модулированных сигналов 22, с помощью которого осуществляется формирование на пониженных частотах зондирующего и гетеродинного сигналов с требуемыми параметрами линейной частотной модуляцией несущей;
цифровой многоразрядный аттенюатор 33, с помощью которого осуществляется косинус-квадратная амплитудная модуляция зондирующих посылок.
Входной высокочастотный (ВЧ) приемник построен по одноканальной супергетеродинной схеме с двукратным преобразованием частоты принимаемых эхо-сигналов. Последние поступают на вход многоканального матричного приемника промежуточной частоты (ПЧ).
Многоканальный матричный приемник ПЧ построен по принципу корреляционно-фильтровой обработки принимаемых локационных сигналов. Его отличием от матричного приемника в составе прототипа является увеличенное число приемных каналов дальности пропорционально коэффициенту сжатия ЛЧМ импульсов.
Как и в прототипе блок-схемное построение ИД РЛС предусматривает возможность ее многоэтапного многорежимного функционирования:
на подготовительном этапе, предшествующем выполнению обзорно-поисковых операций, производится формирование помеховой «карты» [4, 8], которая может периодически обновляться и уточняться на последующих этапах работы ИД РЛС;
на этапе выполнения обзорно-поисковых операций последовательное во времени обзор поискового пространства с традиционным использованием регулярных КНС высокой ЧПИ в отсутствии частотной модуляции их СВЧ несущей;
на этапе первичных дальностных измерений обнаруженных целей их повторное зондирование в соответствии с предлагаемым способом.
Организация функционирования ИД РЛС в перечисленных режимах осуществляется в соответствии с прототипом путем конфигурирования ее аппаратного и программного обеспечения, изменения начальных установок параметров формируемых зондирующих, гетеродинных и служебно-технологических (командно-управляющих) сигналов, а так же характеристик приема и обработки эхо-сигналов.
Так как суть предлагаемых нововведений касается этапа первичных дальностных измерений обнаруженных целей, то далее проведено рассмотрение последовательности производимых операций на этапе измерений, реализация которых предусмотрена в приведенной блок-схеме ИД РЛС.
Входящим в состав передатчика синтезатором 22 в измерительном цикле зондирования формируются:
на первой промежуточной частоте непрерывный ЛЧМ сигнал длительностью, определяемой длительностью зондирующего КНС;
на частоте, определяемой суммой  гетеродинный ЛЧМ сигнал длительностью, определяемой продолжительностью рабочего цикла приема отраженных эхо-сигналов с просматриваемого интервала дальностей.
гетеродинный ЛЧМ сигнал длительностью, определяемой продолжительностью рабочего цикла приема отраженных эхо-сигналов с просматриваемого интервала дальностей.
Цифровой синтезатор сигналов 22 может быть выполнен по блок-схеме формирователя зондирующих сигналов, приведенной в [11].
С помощью преобразователя 23 и СВЧ генератора 5 монохромных колебаний с частотой, определяемой суммой либо разностью частот СВЧ несущей КНС и первой промежуточной частоты  приемника синтезированный блоком 22 ЛЧМ сигнал переносится на СВЧ несущую частоту. Далее преобразованный по частоте непрерывный ЛЧМ сигнал подвергается полосовой фильтрации (блок 24), импульсной модуляции в соответствии с требуемой расстановкой импульсов КНС в измерительном цикле зондирования (блок 4), косинус-квадратной амплитудной модуляции (блок 26), усилению на СВЧ несущей (блок 3) и излучению в эфир с помощью циркулятора 2 и антенны 1.
приемника синтезированный блоком 22 ЛЧМ сигнал переносится на СВЧ несущую частоту. Далее преобразованный по частоте непрерывный ЛЧМ сигнал подвергается полосовой фильтрации (блок 24), импульсной модуляции в соответствии с требуемой расстановкой импульсов КНС в измерительном цикле зондирования (блок 4), косинус-квадратной амплитудной модуляции (блок 26), усилению на СВЧ несущей (блок 3) и излучению в эфир с помощью циркулятора 2 и антенны 1.
Принятые отраженные эхо-сигналы после их традиционно применяемого внутрипериодного бланкирования на время излучения зондирующих посылок блоком 9 (в традиционном ключевом режиме), усиления блоком 10 по высокой частоте преобразователем 27 переносятся на первую ПЧ  После полосовой фильтрации (блок 28) и усиления на первой промежуточной частоте (блок 29) принятые отраженные эхо-сигналы с помощью преобразователем 30 подвергаются частотной демодуляции с их переносом на вторую промежуточную частоту
После полосовой фильтрации (блок 28) и усиления на первой промежуточной частоте (блок 29) принятые отраженные эхо-сигналы с помощью преобразователем 30 подвергаются частотной демодуляции с их переносом на вторую промежуточную частоту  Демодулированные помеховые и целевые эхо-сигналы после полосовой фильтрации (блок 31) и предварительного усиления на второй ПЧ (блок 32) подвергаются косинус-квадратному весовому бланкированию (блок 33), внутриимпульсному косинус-квадратному взвешиванию и фильтровому сжатию их импульсов в блоке 34. Подвергнутые весовой обработке и фильтровому сжатию принятые эхо-сигналы поступают на стробируемые входы 2hФ - канальной линейки идентичных узкополосных радиоприемных каналов (РПрК). Дальнейшая корреляционно-фильтровая обработка принятых сигналов производится по классической схеме, использованной в прототипе. Согласно этой схеме в каждом из РПрК после стробирования сжатых импульсов принятых эхо-сигналов производится их полосовая частотная фильтрация блоками 12.1…12.2hФ, частотная режекция помеховых сигналов нулевой доплеровской частоты фильтрами 13.1…13.2hФ и основное усиление на второй ПЧ (блоки 14.1…14.2hФ) до уровня, достаточного для АЦП принимаемых сигналов. Каждый РПрК выходом подключен к АЦП 15.1…15.2hФ, являющегося переходным связующим элементом между аналоговым РПрК и программируемыми ЦСП в составе БЗУ 16.1…16.2hФ и многопроцессорной линейки спектрально-гармонических анализаторов БПФ с весовым окном по входу (блоки 17.1…17.2hФ) Анализируемый процессорами БПФ 17.1…17.2hФ эквидистантный ряд частотных полос по команде с ЦБК 20 устанавливается в зоне поиска целевых эхо-сигналов.
Демодулированные помеховые и целевые эхо-сигналы после полосовой фильтрации (блок 31) и предварительного усиления на второй ПЧ (блок 32) подвергаются косинус-квадратному весовому бланкированию (блок 33), внутриимпульсному косинус-квадратному взвешиванию и фильтровому сжатию их импульсов в блоке 34. Подвергнутые весовой обработке и фильтровому сжатию принятые эхо-сигналы поступают на стробируемые входы 2hФ - канальной линейки идентичных узкополосных радиоприемных каналов (РПрК). Дальнейшая корреляционно-фильтровая обработка принятых сигналов производится по классической схеме, использованной в прототипе. Согласно этой схеме в каждом из РПрК после стробирования сжатых импульсов принятых эхо-сигналов производится их полосовая частотная фильтрация блоками 12.1…12.2hФ, частотная режекция помеховых сигналов нулевой доплеровской частоты фильтрами 13.1…13.2hФ и основное усиление на второй ПЧ (блоки 14.1…14.2hФ) до уровня, достаточного для АЦП принимаемых сигналов. Каждый РПрК выходом подключен к АЦП 15.1…15.2hФ, являющегося переходным связующим элементом между аналоговым РПрК и программируемыми ЦСП в составе БЗУ 16.1…16.2hФ и многопроцессорной линейки спектрально-гармонических анализаторов БПФ с весовым окном по входу (блоки 17.1…17.2hФ) Анализируемый процессорами БПФ 17.1…17.2hФ эквидистантный ряд частотных полос по команде с ЦБК 20 устанавливается в зоне поиска целевых эхо-сигналов.
Подвергнутые спектральному анализу принятые эхо-сигналы поступают на вход процессора первичной обработки информации (ПОИ) 18. В процессе обработки результатов многоканальной доплеровской фильтрации принятых сигналов (их спектрограмм на выборочном ряде частот) блоком ПОИ 18 рассчитываются пороги обнаружения, выделяются сигналы превышения этих порогов, для каждого стробируемого элемента неоднозначной дальности формируются группы обнаруженных локальных максимумов профильтрованных ЦЭС, селектируются главные максимумов повторно обнаруженных целевых эхо-сигналов, частотные и временные сдвиги которых в соответствии с прототипом пересчитывается ВОИ 19 в искомые однозначные оценки дальности до обнаруженных целей.
Предлагаемый способ верифицирован, технически реализуем и обеспечивает недоступную для аналогов и прототипа возможность помехоустойчивой оперативной первичной дальнометрии обнаруженных целей с применением КНС малой скважности.
Изобретение выполнено на уровне технического предложения и реализовано на ПЭВМ в виде математической имитационно-стохастической модели ИД РЛС.
Результаты проведенных численных модельных экспериментов подтверждают работоспособность и реализуемость помехоустойчивой оперативной дальнометрии обнаруживаемых ИД РЛС целей на фоне мощных ПП с локально-сосредоточенным энергетическим спектром.
Изобретение может быть применено в ИД РЛС для решения задач взятия на сопровождение (низкоточного трассового либо высокоточного с использованием замкнутой следящей системы) обнаруживаемых целей в условиях ПП с локально-сосредоточенным энергетическим спектром, и прежде всего, в условиях воздействия интенсивных маскирующих отражений от подстилающей поверхности, местных предметов и малоподвижных метеообразований.
ЛИТЕРАТУРА
1. Справочник по радиолокации. Под ред. М. Сколника, т. 3 М: Сов. радио. 1979. (с. 383, 369).
2. Справочник по радиолокации /Под ред. М.И. Сколника. Пер. с англ. Под общей ред. B.C. Вербы. В 2 книгах. Книга 1. М.: Техносфера, 2015. (с. 207…211, 186).
3. Оценивание дальности и скорости в радиолокационных системах. Часть 1. Под редакцией А.И. Канащенкова и В.И. Меркулова - М.: «Радиотехника», 2004, (с. 259…263, 271…274, 255…257).
4. Трухачев А.А. Радиолокационные сигналы и их применение. - М.: Воениздат. 2005, (с. 234…240, 241…261).
5. Патент №2641727 Способ импульсно-доплеровской первичной дальнометрии целей на фоне узкополосных пассивных помех. Кириченко А.А., Колбаско И.В., Колобов А.Е., Шевелев С.В.
Приоритет изобретения 27 декабря 2016 г.
Гос. регистрация 23 января 2018 г.
6. Проектирование ФАР. Под ред. Д.И. Воскресенского. М.: - «Радиотехнека», 2003. (с. 435).
7. Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. - М.: «Советское Радио». 1970. (с. 349…352).
8. Справочник по радиолокации. Под ред. М. Сколника, т. 1. М.: Сов. радио. 1976, (с. 143, 150…154).
9. 5. Ч. Кук, М. Бернфельд. Радиолокационные сигналы. Теория и применение. Перевод с английского под редакцией B.C. Кельзона. М.: Сов. радио 1971, (С. 90…91, 245…250, 374…383).
10. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981, (С. 117…119).
11. Цифровая обработка сигналов в многофункциональных радиолокаторах. Под ред, Г.В. Зайцева. М.: - «Радиотехника», 2015 с. 320…325
Изобретение относится к реализуемым импульсно-доплеровскими (ИД) РЛС методам первичных измерений дальности до обнаруживаемых целей. Техническим результатом изобретения является повышение помехоустойчивости первичной дальнометрии обнаруженной одиночной либо не разрешаемой по углу и скорости группы рассредоточенных по дальности целей, которые предварительно обнаружены на фоне интенсивных пассивных помех (ПП) с локально сосредоточенным энергетическим спектром, например отражений от подстилающей поверхности земли, местных предметов и малоскоростных метеообразований. Указанный результат достигается использованием в ИД РЛС в дополнение к основной линейной частотной модуляции (ЛЧМ) несущей частоты квазинепрерывного сигнала вспомогательной высокоскоростной внутриимпульсной ЛЧМ квазинепрерывного сигнала в сочетании с внутриимпульсной косинус-квадратной модуляцией зондирующих посылок, а в процессе приема и обработки аддитивной смеси целевых и помеховых эхо-сигналов применением взамен традиционного внутрипериодного бланкирования эхо-сигналов в ключевом режиме сглаженного косинус-квадратного их бланкирования, а также внутриимпульсной весовой обработки и фильтрового сжатия ЛЧМ импульсов принимаемых эхо-сигналов для увеличения их скважности при последующей многоканальной корреляционно-фильтровой обработке. Благодаря этому обеспечивается типовая для ИД РЛС эффективная доплеровская селекция целей на фоне ПП с сохранением возможности их первичной дальнометрии за один-два цикла зондирования. 8 ил.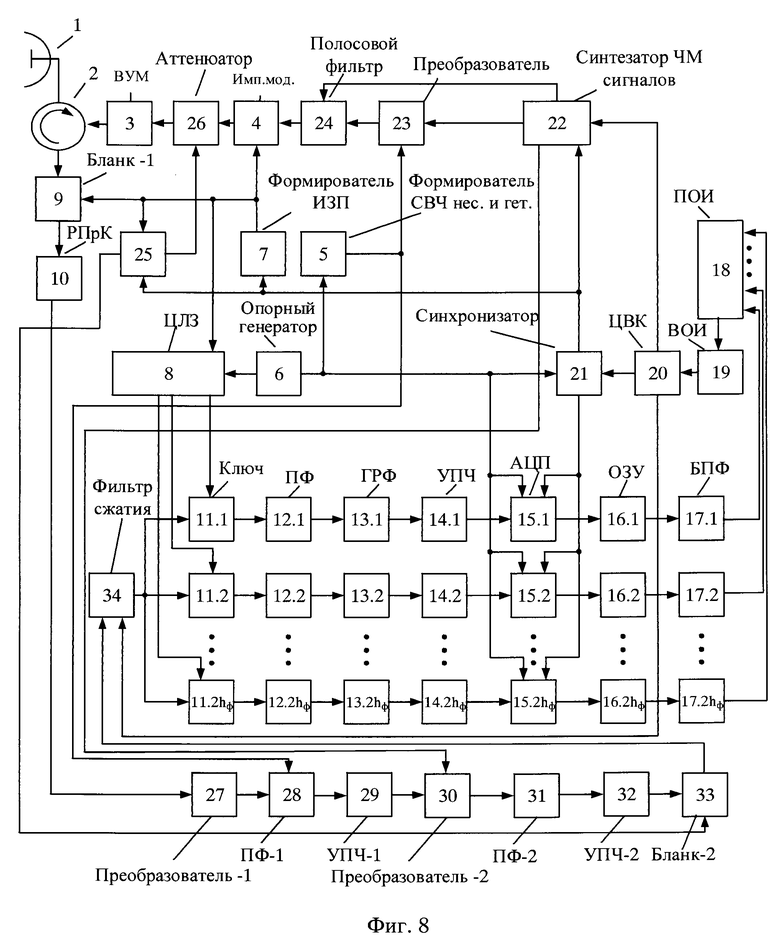
Способ первичной дальнометрии целей импульсно-доплеровской РЛС с малой скважностью зондирующих посылок, состоящий в том, что на подготовительном временном интервале работы импульсно-доплеровской радиолокационной станции (РЛС) производят снятие помеховой карты мешающих отражений с оценкой в каждом угловом направлении рабочего сектора энергетического дальностно-скоростного распределения пассивной помехи (ПП), по данным помеховой карты определяют помехонасыщенные сектора с узкополосным энергетическим спектром ПП и уточняют параметры применяемых в этих секторах зондирующих локационных сигналов и характеристик системы их приема и обработки, в процессе поиска и обнаружения целей в угловых направлениях, характеризующихся наличием интенсивных ПП, n-кратно формируют и направленно излучают регулярные квазинепрерывные сигналы (КНС) разной высокой частоты повторения импульсов (ЧПИ), соосно направленно принимают в паузах работы передатчика РЛС целевые и помеховые эхо-сигналы с последующей их многоканальной по дальности и скорости корреляционно-фильтровой время-частотной обработкой, в результативном цикле импульсно-доплеровского обнаружения, в котором произошло обнаружение цели на фоне узкополосных ПП, производят измерения время-частотных параметров обнаруженного целевого эхо-сигнала с оценкой его однозначного доплеровского и неоднозначного временного сдвигов, а затем производят дальностно-измерительный цикл зондирования обнаруженной цели с использованием КНС с линейной частотной модуляцией (ЛЧМ) его несущей частоты, причем в дальностно-измерительном цикле зондирования принятую аддитивную смесь целевых и помеховых эхо-сигналов подвергают демодуляции и многоканальной корреляционно-фильтровой обработке, повторно обнаруживают целевой эхо-сигнал, измеряют уровни мощности превысивших порог обнаружения локальных максимумов профильтрованного целевого эхо-сигнала, а также его однозначный частотный и неоднозначный временной сдвиг, после чего производят идентификацию главного максимума профильтрованного целевого эхо-сигнала и оценку его однозначного временного сдвига с последующим ее пересчетом в оценку дальности обнаруженной цели, отличающийся тем, что в измерительном цикле зондирования обнаруженной цели при формировании излучаемых радиоимпульсов КНС в соответствии с (1) производят их внутриимпульсную амплитудную косинусквадратную весовую и вспомогательную линейную частотную модуляцию, а в процессе приема и обработки эхо-сигналов последние с использованием частотно-модулированного гетеродинного сигнала с линейным изменением частоты, согласованным с линейной частотной модуляцией всей пачки импульсов излучаемого КНС, подвергают частотной демодуляции с последующим, согласно (2), внутрипериодным косинус-квадратным весовым бланкированием излучаемых импульсов КНС и принимаемых эхо-сигналов и далее, согласно (3), внутриимпульсной косинус-квадратной весовой обработке и фильтровому сжатию импульсов с вспомогательной ЛЧМ модуляцией с последующей их многоканальной время-частотной обработкой



где Us(t) - излучаемый ИД РЛС КНС с внутриимпульсной косинус-квадратной амплитудной и ЛЧМ несущей частоты;
UБ(t) - функция временной вариации коэффициента передачи схемы весового бланкирования недокомпенсированных циркулятором излучаемых импульсов КНС и принимаемых эхо-сигналов;
 - ректанг-функция для представления периодической последовательности импульсов прямоугольной формы единичной высоты и длительностью τи
- ректанг-функция для представления периодической последовательности импульсов прямоугольной формы единичной высоты и длительностью τи
k - нумерация импульсов КНС k=0, ±1, ±2, ±N;
τИ - длительность импульсов КНС;
N - половинное число периодов следования импульсов КНС во временном окне его время-частотной обработки;
ƒНО - несущая частота излучаемого КНС;
βП - крутизна ЛЧМ несущей частоты всей пачки импульсов КНС без учета его дополнительной внутриимпульсной частотной модуляции;
βИ - крутизна дополнительной внутриимпульсной модуляции несущей частоты КНС без учета ЛЧМ несущей частоты всей пачки импульсов КНС;
ТП, FП - соответственно период и ЧПИ КНС;
 - оценка однозначно измеренного доплеровского сдвига ЦЭС, полученная в обнаружительном цикле зондирования;
- оценка однозначно измеренного доплеровского сдвига ЦЭС, полученная в обнаружительном цикле зондирования;
р=1, 2, 3, … - целочисленный параметр выбора ЧПИ КНС;
hg - скважность излучаемой пачки импульсов КНС;
 - скважность импульсов КНС после их сжатия, при которой обеспечивается допустимое снижение эффективности СДЦ с вводом ЛЧМ несущей частоты КНС;
- скважность импульсов КНС после их сжатия, при которой обеспечивается допустимое снижение эффективности СДЦ с вводом ЛЧМ несущей частоты КНС;
ϕН - начальная фаза высокочастотного заполнения излучаемого КНС;
x(t') - сигнал на входе фильтра сжатия ЛЧМ импульсов КНС;
n(t') - шум приемника;
 - значение скважности импульсов КНС после их сжатия, при котором обеспечивается допустимое снижение эффективности СДЦ с вводом ЛЧМ несущей частоты КНС;
- значение скважности импульсов КНС после их сжатия, при котором обеспечивается допустимое снижение эффективности СДЦ с вводом ЛЧМ несущей частоты КНС;
ϕН - начальная фаза высокочастотного заполнения КНС.
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И УСКОРЕНИЯ МАЛОСКОРОСТНОЙ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2018 |
|
RU2692912C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИЗМЕРЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ НИЗКОЛЕТЯЩЕЙ МАЛОСКОРОСТНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ИНВЕРТИРУЕМОЙ ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2017 |
|
RU2697509C2 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ | 2005 |
|
RU2296346C2 |
| JP 2016121935 A, 07.07.2016 | |||
| JP 2019100947 A, 24.06.2019 | |||
| US 4377811 A, 22.03.1983 | |||
| EP 0444458 A2, 04.9.1991 | |||
| US 2020191940 A1, 18.06.2020 | |||
| US 6229475 B1, 08.05.2001. | |||

