Изобретение относится к области железнодорожного транспорта и может быть использовано при позиционировании и определении скорости подвижных единиц на железнодорожных сортировочных станциях.
Известно устройство позиционирования железнодорожной подвижной единицы, содержащее камеру и блок обработки данных, N-1 оптических датчиков, М источников света, измеритель пройденного расстояния, промышленный компьютер, входами устройства являются входы оптических датчиков и измерителя пройденного расстояния, выходы оптических датчиков подключены к входам промышленного компьютера, выходы измерителя пройденного расстояния подключены к входам промышленного компьютера, выходом устройства является выход промышленного компьютера, на котором формируется сигнал местоположения подвижной единицы на основе распознавания на видеоизображении, полученном при перемещении железнодорожной подвижной единицы по железнодорожным путям, следующих технологических ситуаций: проход стрелочного перевода по плюсовому положению, проход стрелочного перевода по минусовому положению, начало движения, остановка движения, а также тип и номер стрелочного перевода, тип и обозначение светофора (RU 2564295, B61L 25/00, 27.09.2015).
Устройство осуществляет точное позиционирование на полигоне железной дороги, измерение пройденного расстояния, определение направления движения при проходе стрелочных переводов по видеоизображению и отображение местоположения на схематическом плане полигона.
Недостатком данного устройства является невозможность одновременного позиционирования более одной подвижной единицы.
Известно техническое решение использующее регистраторы, представляющие собой два расположенные на заданной высоте от железнодорожного полотна видеорегистратора, которые производят съемку железнодорожного полотна синхронно, в каждый момент времени запоминается текущий кадр с первого видеорегистратора, определяется кадр с тем же фрагментом железнодорожного полотна в видеопоследовательности со второго видеорегистратора, вычисляется сдвиг между этими кадрами, и по разнице порядковых номеров кадров и сдвигу между ними определяется скорость (RU 2518078, G01P 3/68, 10.06.2014).
Недостаток этого технического решения заключается в том, что оно позволяет определить скорость только одного подвижного состава без определения его положения.
В качестве прототипа принято техническое решение, предусматривающее видеонаблюдение за транспортной обстановкой на дорожном полотне с помощью видеокамеры, установленной над дорожным полотном под определенным углом, и выделение движущегося отдельного транспортного средства, находящегося в поле зрения видеокамеры. До измерения калибруют продольный размер кадра с привязкой фактического расстояния на дорожном полотне к относительному расстоянию на кадре, соответствующее конкретному углу места размещения видеокамеры относительно дорожного полотна. Далее периодически фиксируют изображение дорожного полотна, свободного от движущихся транспортных средств, производят покадровую съемку дорожного полотна с последующим вычитанием из полученного покадрового изображения дорожного полотна, свободного от движущихся транспортных средств. Перемещающееся транспортные средства выявляют на однородном цветовом фоне разностного кадра. Реперные метки выявляют и выделяют в виде самых темных и самых светлых частей перемещающегося транспортного средства. После этого вычисляют геометрические центры реперных меток, измеряют скорости перемещения геометрических центров реперных меток на кадре, усредняют скорости перемещения центров реперных меток на кадре, вычисляют скорости продольного перемещения объекта на основе усредненной скорости перемещения реперных меток и предварительной калибровки продольного размера кадра (RU 2486598, G08G 1/052, 27.06.2013).
Недостатки известного технического решения заключаются в невозможности функционирования при отсутствии изображения дорожного полотна, свободного от подвижных единиц и в невозможности отделения ключевых объектов от других движущихся объектов, а также в сложности объединения сигналов, полученных от нескольких видеорегистраторов.
Технический результат изобретения заключается в устранение указанных недостатков, а именно: в повышении функциональной надежности за счет возможности выделения ключевых объектов - железнодорожных подвижных единиц, от других движущихся объектов на контролируемом участке железнодорожных путей, с увязкой получаемых данных в общее информационное поле, а также за счет обеспечения возможности функционирования при отсутствии изображения дорожного полотна, свободного от подвижных единиц.
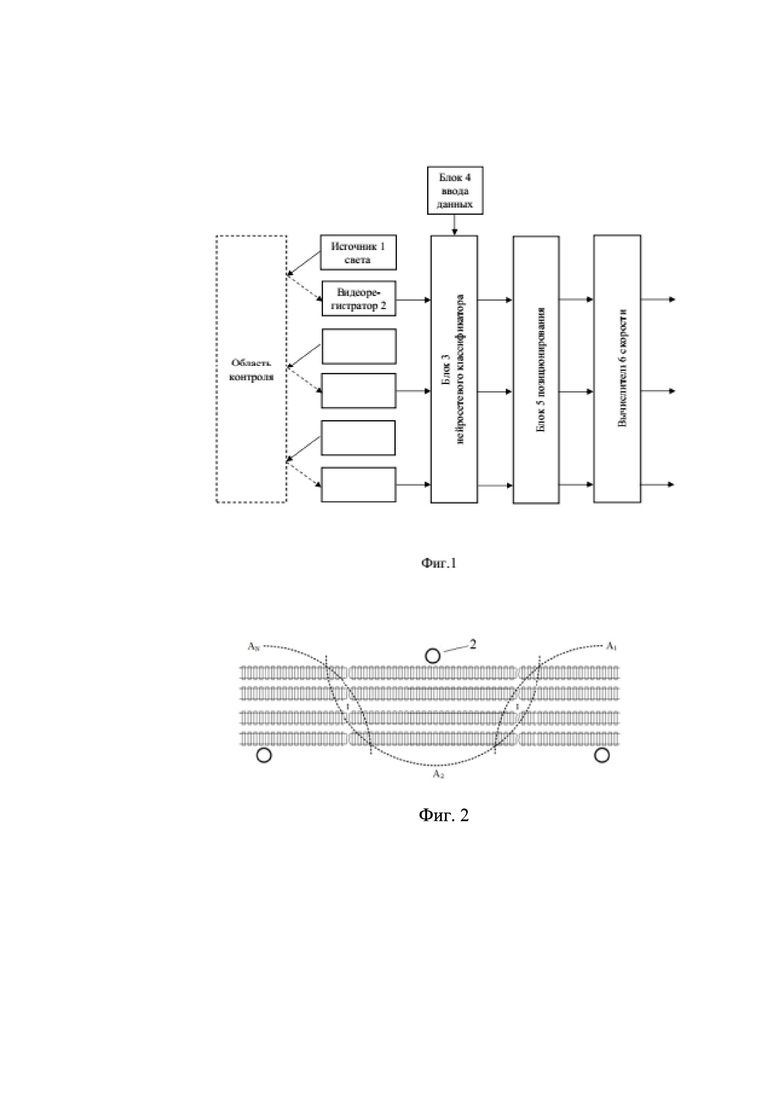
Технический результат достигается тем, что устройство для позиционирования и определения скорости железнодорожных подвижных единиц, содержащее источник света и видеорегистратор, установленные под определенным углом к контролируемому участку железнодорожных путей, согласно изобретению снабжено дополнительными источниками света и видеорегистраторами, размещенными по обе стороны контролируемого участка железнодорожных путей, и в него введены последовательно соединенные блок нейросетевого классификатора, к входу управления которого подключен блок ввода данных, блок позиционирования, формирующий на своих выходах сигналы позиционирования ключевых объектов, и вычислитель скорости, формирующий на своих выходах сигналы, несущие информацию о скоростях ключевых объектов, при этом выходы видеорегистраторов соединены с соответствующими входами блока нейросетевого классификатора.
На чертеже (фиг.1) представлена структурная схема устройства для позиционирования и определения скорости железнодорожных подвижных единиц. На фиг.2 показан пример размещения видеорегистраторов по обеим сторонам контролируемого участка железнодорожных путей и области их контроля, необходимые для создания общего информационного поля.
Устройство для позиционирования и определения скорости железнодорожных подвижных единиц содержит источники 1 света и видеорегистраторы 2, установленные под определенным углом к контролируемому участку железнодорожных путей, и размещенные по обе стороны контролируемого участка железнодорожных путей, выходы видеорегистраторов 2 соединены с соответствующими входами блока 3 нейросетевого классификатора, к входу управления которого подключен блок 4 ввода данных, выходы блока 3 нейросетевого классификатора соединены со входами блока 5 позиционирования, формирующего на своих выходах сигналы позиционирования ключевых объектов (железнодорожных подвижных единиц), выходы блока 5 позиционирования соединены со входами вычислителя 6 скорости, формирующего на своих выходах сигналы, несущие информацию о скоростях ключевых объектов.
Устройство для позиционирования и определения скорости железнодорожных подвижных единиц работает следующим образом.
Источники 1 света обеспечивают необходимый уровень освещенности для работы видеорегистраторов 2. Пример размещения видеорегистраторов по обеим сторонам контролируемого участка железнодорожных путей приведен на фиг.2, где также показаны охватываемые ими области контроля А1, А2,.. Аn (размещение источников света аналогично – на чертеже не показано). В качестве видеорегистраторов могут использоваться видеокамеры видимого и инфракрасного диапазона, имеющие угол обзора до 360 градусов. В качестве источников света могут использоваться светодиоды видимого и инфракрасного излучения.
Данные с видеорегистраторов 2 в виде изображений видеокадров поступают на входы блока 3 нейросетевого классификатора.
В предварительно подготовленном устройстве данные с видеорегистраторов 2 поступают в виде изображений видеокадров на вход обученного блока 3 нейросетевого классификатора. В блоке 3 нейросетевого классификатора происходит автоматическое формирование реперных меток ключевых объектов.
Для осуществления автоматического формирования реперных меток ключевых объектов блоком 3 нейросетевого классификатора необходимо заранее провести его обучение, которое осуществляется на этапе подготовки устройства.
В качестве основы алгоритма обучения нейросетевого классификатора может использоваться математический аппарат глубокого обучения [Redmon J. et al. You only look once: Unified, real-time object detection //Proceedings of the IEEE conference on computer vision and pattern recognition. – 2016. – С. 779-788].
Для обучения блока 3 нейросетевого классификатора формируют обучающую выборку в виде набора изображений, поступающих от видеорегистраторов 2. С помощью блока 4 ввода данных на изображениях отмечают реперные метки ключевых объектов в виде выпуклых областей изображения. Данные реперных меток ключевых объектов поступают на вход блока 5 позиционирования.
В блоке 5 позиционирования формируются сигналы позиционирования ключевых объектов на базе сопоставления центров реперных меток ключевых объектов с реальными расстояниями в кадре.
Для осуществления сопоставления реальных расстояний области контроля и точек изображений производится предварительная калибровка видеокадров.
Данные позиционирования поступают на вход вычислителя 6 скорости.
Путем вычисления разности позиций ключевых объектов в текущий и предыдущий моменты времени на выходе вычислителя 6 скорости формируются сигналы определения скоростей ключевых объектов, находящихся внутри области контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство счета железнодорожных подвижных единиц | 2022 |
|
RU2779670C1 |
| Способ содержания путей железнодорожного сортировочного парка на основе данных видеоаналитики | 2024 |
|
RU2836946C1 |
| ОПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2013 |
|
RU2518078C1 |
| Способ распознавания сигналов светофора в ночное время суток | 2021 |
|
RU2770068C1 |
| СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ АВАРИЙ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2006 |
|
RU2295470C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2597328C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
Изобретение относится к средствам позиционирования и определения скорости подвижных единиц на железнодорожных сортировочных станциях. Устройство содержит источники света и видеорегистраторы, установленные под определенным углом к контролируемому участку железнодорожных путей и размещенные по обе стороны контролируемого участка железнодорожных путей, выходы видеорегистраторов соединены с соответствующими входами блока нейросетевого классификатора, к входу управления которого подключен блок ввода данных, выходы блока нейросетевого классификатора соединены с входами блока позиционирования, формирующего на своих выходах сигналы позиционирования железнодорожных подвижных единиц, выходы блока позиционирования соединены с входами вычислителя скорости, формирующего на своих выходах сигналы, несущие информацию о скоростях ключевых объектов. Достигается повышение функциональной надежности с обеспечением возможности функционирования при отсутствии изображения дорожного полотна, свободного от подвижных единиц. 2 ил.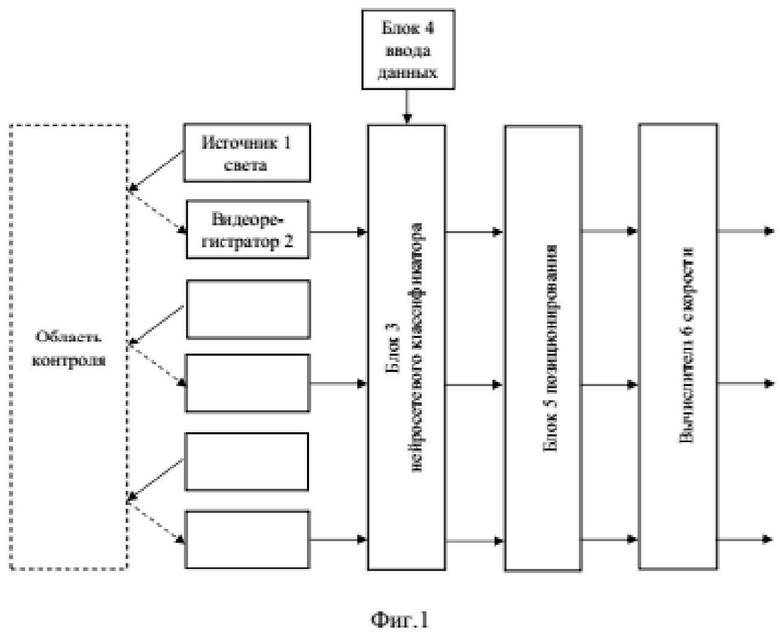
Устройство для позиционирования и определения скорости железнодорожных подвижных единиц, содержащее источник света и видеорегистратор, установленные под определенным углом к контролируемому участку железнодорожных путей, отличающееся тем, что оно снабжено дополнительными источниками света и видеорегистраторами, размещенными по обе стороны контролируемого участка железнодорожных путей, и в него введены последовательно соединенные блок нейросетевого классификатора, к входу управления которого подключен блок ввода данных, блок позиционирования, формирующий на своих выходах сигналы позиционирования ключевых объектов, и вычислитель скорости, формирующий на своих выходах сигналы, несущие информацию о скоростях ключевых объектов, при этом выходы видеорегистраторов соединены с соответствующими входами блока нейросетевого классификатора.
| А.Н | |||
| Шабельников, А.В | |||
| Суханов, М.В | |||
| Суханова "АДАПТАЦИЯ МОДЕЛЕЙ ГЛУБОКОГО ОБУЧЕНИЯ ДЛЯ КОНТРОЛЯ ПОДВИЖНЫХ ЕДИНИЦ НА СОРТИРОВОЧНОЙ СТАНЦИИ" "Информатика, вычислительная техника и инженерное образование" N 4 (37), 2019 | |||
| г | |||
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486598C1 |
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2597328C1 |
| ФЕЛЬДМАН А.Б., ЕРОХИН Д.Ю | |||
| "ЛОКАЛИЗАЦИЯ ОБЪЕКТОВ НА ВИДЕОИЗОБРАЖЕНИЯХ С | |||

