Область техники
Настоящая заявка относится к технической области электропитания и электронов, относится к технологии инверторов, и в частности к способу параллельного управления и системе параллельного управления для однофазных инверторов и инвертору.
Предшествующий уровень техники
Локомотив с двигателем внутреннего сгорания представляет собой локомотив, колеса которого приводятся в движение посредством зубчатого зацепления с помощью движущей силы от двигателя внутреннего сгорания. На сегодняшний день в Китае все еще используются локомотивы с двигателем внутреннего сгорания, и в каждом из локомотивов с двигателем внутреннего сгорания применяется вагон для выработки электроэнергии для снабжения всего поезда источником питания трехфазного переменного тока 380В, который снабжает электроэнергией такие системы, как система кондиционирования воздуха или система освещения. Поскольку вагон для выработки электроэнергии имеет недостатки, такие как высокие эксплуатационные расходы и загрязнение окружающей среды, в настоящее время его постепенно преобразуют в электровоз, и полученный в результате преобразования электровоз получает электроэнергию от подвесной контактной системы для того, чтобы подавать электроэнергию на нагрузки во всем поезде. В связи с существованием нейтральной вставки поезд находится в состоянии отсутствия электропитания при прохождении через нейтральную вставку, системы, такие как система кондиционирования воздуха и система освещения, не могут нормально работать, и, чтобы удовлетворять требования пассажиров к освещению при прохождении через нейтральную вставку, дополнительно предусматривают аккумуляторную батарею и источник электроэнергии, устанавливаемый под днищем транспортного средства, и электроэнергия для системы освещения в нейтральной вставке подается посредством аккумуляторной батареи и однофазных инверторов, чтобы гарантировать обеспечение бесперебойного освещения для пассажиров, во избежание таких проблем, как паника среди пассажиров и т.п.
По сравнению с однофазными инверторами обычного поезда однофазные инверторы после преобразования вагона для выработки электроэнергии используются в качестве источника бесперебойного питания для непрерывной подачи электроэнергии для системы освещения во время движения, и требуется, чтобы они работали в течение длительного времени, а значит повышается требование к надежности системы освещения. В настоящее время обычно применяется решение, заключающееся избыточности взаимного резервирования модулей с двумя инверторами: внутри предусматривают блок с двумя модулями однофазных инверторов, и обычно один модуль инвертора работает, а другой модуль инвертора является резервным, и когда на одном из модулей возникает неисправность, другой модуль запускается и взаимно резервируется контактором для дальнейшей подачи питания для нагрузок. Таким путем до определенной степени может быть улучшена стабильность системы освещения. Однако при взаимном резервном переключении двух модулей происходит задержка как запуска резервного модуля, так и задействования контактора для взаимного резервирования, при этом однофазный инвертор не имеет выводов, так что не может поддерживаться нормальная работа системы освещения, трудно гарантировать бесперебойное освещение для пассажиров и все еще может возникнуть проблема, связанная с паникой среди пассажиров, вызванная прерыванием освещения.
Сущность изобретения
Для решения вышеупомянутой задачи, такой как нарушение непрерывности электропитания, вызванной отсутствием выводов из однофазных инверторов из-за задержки во время взаимного резервного переключения однофазных инверторов, в настоящей заявке предоставлены способ параллельного управления и система параллельного управления для однофазных инверторов для бесперебойной подачи питания во время переключения, а также инвертор.
Для достижения вышеупомянутой цели в настоящей заявке предоставлен способ параллельного управления для однофазных инверторов, используемый в параллельной системе однофазных инверторов, содержащей множество однофазных инверторов, для управления выходным напряжением и выходным током каждого из однофазных инверторов и разделения поровну выходных токов множества однофазных инверторов, при этом способ параллельного управления включает следующие конкретные этапы:
получение выходного напряжения и выходного тока каждого из однофазных инверторов в текущий момент времени и в предыдущий момент времени;
восстановление полученной переменной напряжения и полученной переменной тока, виртуализация ортогональных виртуальных величин, причем каждая имеет разность фазы 90 градусов с фазой полученной переменной напряжения или полученной переменной тока соответственно, и моделирование ортогональных компонентов параллельной системы однофазных инверторов в координатах αβ;
преобразование ортогональных компонентов в координатах αβ в компоненты постоянного тока в координатах dq;
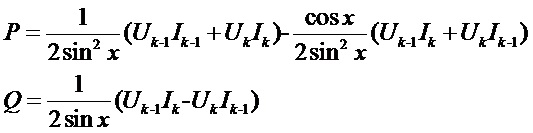
вычисление мгновенной активной мощности P и мгновенной реактивной мощности Q, при этом формулы вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q имеют вид:

в этих формулах 





обнаружение фазы шины переменного тока и управление целевым значением выходного компонента постоянного тока на оси q в координатах dq так, чтобы оно равнялось нулю, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми;
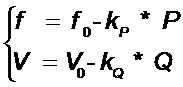
управление выходной частотой каждого из однофазных инверторов посредством управления статизмом так, чтобы делать выходные фазы множества однофазных инверторов одинаковыми с целью разделения поровну активных мощностей, и управление выходной амплитудой каждого из однофазных инверторов посредством управления статизмом так, чтобы делать амплитуды выходных напряжений множества однофазных инверторов идентичными с целью разделения поровну реактивных мощностей; и соответствия статизма управления статизмом имеют вид:

в этих формулах 





установление значения 


вычисление фазы 

модулирование и генерирование импульсов SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов согласно значению команды выходного напряжения в координатах abc.
Предпочтительно полученную переменную напряжения и полученную переменную тока восстанавливают с применением обобщенного интегратора второго порядка, причем обобщенный интегратор второго порядка имеет вход Vin и два выхода Vo и qVo соответственно, при этом выход Vo имеет ту же фазу и амплитуду, что и вход Vin, а выход qVo имеет ту же амплитуду, что и вход Vin, и имеет запаздывание 90 градусов относительно входа Vin по фазе, и передаточные функции между двумя выходами и входом имеют вид:
в этих формулах 

после дискретизации передаточной функции в области s получают следующие разностные уравнения:
в этих формулах 










выход
Предпочтительно ортогональные компоненты в координатах αβ преобразуют в компоненты постоянного тока в координатах dq посредством преобразования Парка, при этом формулы преобразования имеют вид:
в этих формулах 



Предпочтительно фазу шины переменного тока обнаруживают посредством контура фазовой синхронизации, и целевым значением выходного компонента постоянного тока на оси q в координатах dq управляют так, чтобы оно равнялось нулю, с помощью ПИ-контроллера, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми; конкретными этапами являются: получение напряжения шины переменного тока и создание ортогонального компонента, имеющего запаздывание 90 градусов относительно напряжения шины в координатах αβ, с использованием обобщенного интегратора второго порядка; преобразование ортогонального компонента в координатах αβ в компоненты постоянного тока в координатах dq посредством преобразования Парка и вычисление компонента
Предпочтительно коэффициенты статизма при управлении статизмом корректируют в процессе, в котором множество однофазных инверторов запускают параллельно, и откорректированные соответствия статизма имеют вид:

в этих формулах 

Предпочтительно управление с обратной связью по компонентам постоянного тока на оси d и компонентам постоянного тока на оси q в координатах dq соответственно выполняют путем двухконтурного управления по напряжению и току для получения значения команды выходного напряжения в осях dq; конкретными этапами являются: вычисление разности между значением 





Предпочтительно значения команды выходного напряжения в координатах dq преобразуют в значение команды выходного напряжения в координатах αβ посредством обратного преобразования Парка, и значение команды выходного напряжения в координатах αβ преобразуют в значение команды выходного напряжения в координатах abc посредством обратного преобразования Кларка.
Предпочтительно импульсы SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов генерируют согласно значению команды выходного напряжения в координатах abc; конкретными этапами являются: создание двух синусоидальных модулирующих волн 






Для достижения вышеупомянутой цели в настоящей заявке дополнительно предоставлена система параллельного управления для однофазных инверторов, содержащая:
устройство, выполненное с возможностью получения выходного напряжения и выходного тока каждого из однофазных инверторов;
устройство, выполненное с возможностью восстановления полученной переменной напряжения и полученной переменной тока, виртуализации ортогональных виртуальных величин, причем каждая имеет разность фазы 90 градусов с фазой полученной переменной напряжения или полученной переменной тока соответственно, и моделирования ортогональных компонентов параллельной системы однофазных инверторов в координатах αβ;
устройство, выполненное с возможностью преобразования ортогональных компонентов в координатах αβ в компоненты постоянного тока в координатах dq;
устройство, выполненное с возможностью вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q согласно формулам вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q; при этом формулы вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q имеют вид:
в этих формулах
устройство, выполненное с возможностью обнаружения фазы шины переменного тока и управления целевым значением выходного компонента постоянного тока на оси q в координатах dq так, чтобы оно равнялось нулю, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми;
устройство, выполненное с возможностью управления выходной частотой каждого из однофазных инверторов посредством управления статизмом так, чтобы делать выходные фазы множества однофазных инверторов одинаковыми с целью разделения поровну активных мощностей, и управления выходной амплитудой каждого из однофазных инверторов посредством управления статизмом так, чтобы делать амплитуды выходных напряжений множества однофазных инверторов идентичными с целью разделения поровну реактивных мощностей;
устройство, выполненное с возможностью установления значения
устройство, выполненное с возможностью вычисления фазы согласно выходной частоте каждого из однофазных инверторов, преобразования значения команды выходного напряжения в координатах dq в значение команды выходного напряжения в координатах αβ и преобразования значения команды выходного напряжения в координатах αβ в значение команды выходного напряжения в координатах abc; и
блок управления, выполненный с возможностью модулирования и генерирования импульсов SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов согласно значению команды выходного напряжения в координатах abc.
Предпочтительно полученное выходное напряжение и полученный выходной ток каждого из однофазных инверторов содержат выходное напряжение и выходной ток в текущий момент времени, а также выходное напряжение и выходной ток в предыдущий момент времени.
Также система параллельного управления для однофазных инверторов дополнительно содержит устройство, выполненное с возможностью корректировки коэффициентов статизма выходной частоты и выходной амплитуды во время параллельного пуска.
Для достижения вышеупомянутой цели в настоящей заявке дополнительно предоставлен инвертор, содержащий множество параллельных однофазных инверторов, при этом все однофазные инверторы имеют одинаковую конструкцию; инвертор дополнительно содержит систему параллельного управления для однофазных инверторов, и как усилительная цепь прерывателя, так и инверторная цепь каждого из однофазных инверторов соединены с блоком управления системы параллельного управления для однофазных инверторов.
По сравнению с известным уровнем техники настоящая заявка имеет следующие преимущества и полезные эффекты.
(1) Согласно настоящей заявке множеством однофазных инверторов управляют с обеспечением их параллельного соединения и одновременного запуска в работу, и после возникновения неисправности на одном из однофазных инверторов любой другой однофазный инвертор автоматически принимает на себя нагрузку однофазного инвертора, на котором возникла неисправность, так что проблема, связанная с задержкой при повторном запуске модуля с взаимным резервированием, решается, реализуется реальное бесперебойное электропитание от источника питания, достигается высокая надежность и предотвращается влияние на управление транспортным средством.
(2) Согласно настоящей заявке полученные выходное напряжение и выходной ток восстанавливают с применением обобщенного интегратора второго порядка, и при создании ортогональных компонентов выполняют адаптивную фильтрацию, так что улучшается способность системы к защите от помех, точность фазовой синхронизации является высокой и эффективно подавлялся воздействующий ток, генерируемый во время подключения к сети.
(3) Согласно настоящей заявке выходную мощность вычисляют с применением нового способа вычисления мгновенной мощности, мгновенную активную мощность и мгновенную реактивную мощность можно вычислить с применением только значений дискретизации в два смежных момента времени вместо общей единицы, так что влияния общей задержки в традиционном вычислении мощности на устойчивость и динамическое свойство устраняется. После внезапного изменения нагрузки мгновенную мощность можно получить в рамках только одного периода, так что сокращается задержка вычисления и свойство динамического слежения является хорошим. Благодаря применению нового способа вычисления мгновенной мощности отсутствует необходимость в вычислении тригонометрической функции в режиме реального времени, так что объем вычислений алгоритма управления уменьшается и используется меньше ресурсов DSP.
(4) Согласно настоящей заявке применяют стратегию управления статизмом при синхронном пуске и во время параллельного пуска корректируют коэффициенты статизма, благодаря чему улучшается эффект статизма, можно быстро подавлять воздействующий ток, генерируемый во время подключения к сети, решается проблема относительно слабого управления статизмом во время пуска, расширяется рабочий диапазон параллельной системы и повышается коэффициент успешности параллельного пуска.
(5) В настоящей заявке применяют способ униполярной частотной умножающей модуляции, так что частоты переключения четырех разрядников однофазных инверторов являются такими же, что и частота несущей, при этом частота импульса, выдаваемая однофазным инвертором, удваивается при условии, что не изменяется частота переключения устройства питания, значительно уменьшаются размеры и вес фильтра, такого как реактор и конденсатор, и снижаются затраты на однофазные инверторы.
Краткое описание графических материалов
На фиг. 1 представлено схематическое изображение, на котором показана топологическая структура главной цепи однофазного инвертора в варианте осуществления настоящей заявки;
На фиг. 2 представлена блок-схема, на которой показана структура параллельной системы из однофазных инверторов в варианте осуществления настоящей заявки;
На фиг. 3 представлено схематическое изображение, на котором показана структура обобщенного интегратора второго порядка в варианте осуществления настоящей заявки;
На фиг. 4 представлена схематическая блок-схема, на которой показано вычисление мгновенной мощности в варианте осуществления настоящей заявки;
На фиг. 5 представлено схематическое изображение, на котором показан контур фазовой синхронизации на основании обобщенного интегратора второго порядка в варианте осуществления настоящей заявки; и
На фиг. 6 представлена блок-схема, на которой показана структура системы управления для однофазных инверторов в варианте осуществления настоящей заявки.
Подробное описание вариантов осуществления
Настоящая заявка подробно описана ниже посредством иллюстративных вариантов осуществления. Однако следует понимать, что без дальнейшего описания элементы, структуры и признаки одной реализации могут также быть выгодно внесены в комбинации и в другие реализации.
В вариантах осуществления настоящей заявки каждый из соответствующих однофазных инверторов содержит усилительную цепь прерывателя и инверторную цепь, и топология главной цепи однофазного инвертора показана на фиг. 1. Усилительная цепь прерывателя состоит из повышающего реактора L1, диода D1 и разрядника Q5, и входное напряжение 48В постоянного тока аккумуляторной батареи повышается до 200В постоянного тока. Инверторная цепь содержит инверторный мост, состоящий из четырех разрядников Q1, Q2, Q3 и Q4, и фильтр, состоящий из реактора L2 и конденсатора C2. Однофазный инвертор снаружи выдает напряжение после изоляции и усиления трансформатором T1 и обеспечивает мощность однофазного переменного тока для поезда после преобразования 200В постоянного тока в 220В переменного тока.
В вариантах осуществления настоящей заявки связанная параллельная система однофазных инверторов по меньшей мере содержит два параллельных однофазных инвертора, то есть параллельная система однофазных инверторов может содержать два, три, четыре или более параллельных однофазных инверторов, которые конкретно определяются согласно фактической потребности. Параллельная система однофазных инверторов в качестве примера содержит два параллельных однофазных инвертора, и со ссылкой на параллельную систему из однофазных инверторов, как показано на фиг. 2, два однофазных инвертора в системе имеют одинаковую конструкцию и работают параллельно без разделения на главный и вспомогательный.
В варианте осуществления настоящей заявки предоставлен способ параллельного управления для однофазных инверторов. Получают выходное напряжение и выходной ток каждого из однофазных инверторов; напряжение и ток в статических координатах abc преобразовывают в координатах dq путем восстановления и преобразования координат для их разъединения; значение команды выходного напряжения в осях dq получают путем управления с обратной связью; значение команды выходного напряжения в координатах dq преобразовывают в значение команды выходного напряжения в координатах abc; и волны модуляции модулируют и генерируют согласно значению команды выходного напряжения в координатах abc для управления переключением устройства питания. Способ параллельного управления включает следующие конкретные этапы:
S1: получают выходное напряжение и выходной ток каждого из однофазных инверторов;
S2: восстанавливают полученную переменную напряжения и полученную переменную тока, виртуализируют ортогональные виртуальные величины, причем каждая имеет разность фазы 90 градусов с фазой полученной переменной напряжения или полученной переменной тока соответственно, и моделируют ортогональные компоненты параллельной системы однофазных инверторов в координатах αβ;
S3: ортогональные компоненты в координатах αβ преобразовывают в компоненты постоянного тока в координатах dq;
S4: вычисляют мгновенную активную мощность P и мгновенную реактивную мощность Q;
S5: обнаруживают фазу шины переменного тока и целевым значением выходного компонента постоянного тока на оси q в координатах dq управляют так, чтобы оно равнялось нулю, чтобы сделать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми и обеспечить возможность однофазному инвертору, не запущенному первым, автоматически отслеживать шину переменного тока с целью поддержания фаз идентичными и уменьшения воздействующего тока, генерируемого во время подключения к сети инвертора, не запущенного первым;
S6: выходной частотой каждого из однофазных инверторов управляют так, чтобы сделать выходные фазы множества однофазных инверторов одинаковыми с целью разделения поровну активных мощностей, и выходной амплитудой каждого из однофазных инверторов управляют так, чтобы сделать амплитуды выходных напряжений множества однофазных инверторов идентичными с целью разделения поровну реактивных мощностей;
S7: управление с обратной связью по компонентам постоянного тока на оси d и компонентам постоянного тока на оси q в координатах dq соответственно выполняют для получения значения команды выходного напряжения в осях dq;
S8: значение команды выходного напряжения в координатах dq преобразовывают в значение команды выходного напряжения в координатах αβ и значение команды выходного напряжения в координатах αβ преобразовывают в значение команды выходного напряжения в координатах abc; и
S9: SPWM импульсы управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов модулируют и генерируют согласно значению команды выходного напряжения в координатах abc.
Благодаря использованию вышеупомянутого способа параллельного управления для однофазных инверторов в настоящей заявке множеством однофазных инверторов управляют с обеспечением их параллельного соединения и одновременного запуска в работу, и после возникновения неисправности на одном из однофазных инверторов любой другой однофазный инвертор автоматически принимает на себя нагрузку однофазного инвертора, на котором возникла неисправность, так что проблема, связанная с задержкой при повторном запуске модуля с взаимным резервированием, решается, реализуется реальное бесперебойное электропитание от источника питания, достигается высокая надежность и предотвращается влияние на управление транспортным средством.
В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S2 полученную переменную напряжения и полученную переменную тока восстанавливают с применением обобщенного интегратора второго порядка, со ссылкой на фиг. 3, обобщенный интегратор второго порядка имеет вход Vin и два выхода Vo и qVo соответственно, при этом выход Vo имеет ту же самую фазу и амплитуду, что и вход Vin, выход qVo имеет ту же самую амплитуду, что и вход Vin, и имеет запаздывание в 90 градусов относительно входа Vin по фазе, и передаточные функции между двумя выходами и имеют вид:
в этих формулах 

После дискретизации передаточной функции в области s получают следующие разностные уравнения:
в этих формулах
Выход
Путем применения обобщенного интегратора второго порядка восстанавливают выходное напряжение и выходной ток и виртуализируют ортогональный компонент, имеющий запаздывание 90 градусов по фазе, благодаря чему решаются такие проблемы, как задержка фильтрации и плохая способность к динамической реакции, возникающие в случае, когда ортогональные виртуальные сигналы создают с использованием традиционного способа. Благодаря применению способа восстановления, в котором применяют обобщенный интегратор второго порядка, одновременно с созданием ортогональных виртуальных величин можно выполнять адаптивную фильтрацию в отношении получаемых значений, так что способность системы к защите от помех улучшается. Созданные ортогональные виртуальные величины не только могут реализовывать управление разъединением в осях dq, но и обеспечивают основу для последующего контура фазовой синхронизации, благодаря чему устраняется влияние неблагоприятного фактора, такого как компонент постоянного тока, на точность фазовой синхронизации и эффективно подавляется воздействующий ток, генерируемый во время подключения к цепи.
В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S3 ортогональные компоненты в координатах αβ преобразовывают в компоненты постоянного тока в координатах dq посредством преобразования Парка, при этом формулы преобразования имеют вид:
в этих формулах
В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S4 получают выходные напряжения и выходные токи каждого из однофазных инверторов в текущий момент и в предыдущий момент и вычисляют мгновенную активную мощность P и мгновенную реактивную мощность Q, как показано на фиг. 4, при этом формулы вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q имеют вид:
в этих формулах
В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S5 фазу шины переменного тока обнаруживают посредством контура фазовой синхронизации и целевым значением компонента постоянного тока на оси q, выдаваемого шиной в координатах dq, управляют так, чтобы оно равнялось нулю, при помощи контроллера PI, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми. Со ссылкой на фиг. 5 конкретными этапами являются: получают напряжение шины переменного тока и с использованием обобщенного интегратора второго порядка создают ортогональный компонент, имеющий запаздывание 90 градусов относительно напряжения шины, в координатах αβ, со ссылкой на этап 2; ортогональный компонент в координатах αβ преобразовывают в компоненты постоянного тока в координатах dq посредством преобразования Парка и вычисляют компонент
В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S6 каждый из однофазных инверторов обнаруживает активную мощность и реактивную мощность, выдаваемые им самим, и активная мощность, выдаваемая однофазным инвертором, фаза которого является опережающей, превышает ту, которую выдает однофазный инвертор, фаза которого является запаздывающей. Выходной частотой каждого из однофазных инверторов управляют посредством управления статизмом так, чтобы делать выходные фазы множества однофазных инверторов одинаковыми с целью разделения поровну активных мощностей; выходной амплитудой каждого из однофазных инверторов управляют посредством управления статизмом так, чтобы делать амплитуды выходных напряжений множества однофазных инверторов идентичными с целью разделения поровну реактивных мощностей; и соответствия по статизму, относящиеся к управлению статизмом, имеют вид:
в этих формулах
В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S6 коэффициенты статизма в управлении статизмом корректируют в процессе, в котором множество однофазных инверторов запускают параллельно, и откорректированные соответствия по статизму имеют вид:
в этих формулах

в этой формуле Uref представляет целевое значение напряжения и U представляет текущее значение напряжения.
Множество однофазных инверторов получают питание одновременно и запускаются вместе. Более того, однофазные инверторы имеют идентичную конструкцию и в основном идентичны в отношении задержки главной цепи, так чтобы не быть синхронизированными по фазе во время пуска, но непосредственно соединенными с сетью во время плавного пуска. Во время плавного пуска выходные напряжения являются очень низкими, вследствие чего как выходные активные мощности, так и реактивные мощности являются очень низкими, эффект статизма является относительно слабым, перераспределение тока однофазных инверторов является плохим, и в таком случае легко возникают выходные колебания, приводя к нарушению параллельной системы. В настоящей заявке применяют оптимизированное управление статизмом при синхронном пуске, посредством чего может быть реализована совместимость рабочих условий плавного пуска и нормальной работы; могут быть откорректированы коэффициенты статизма, благодаря чему может быть улучшен эффект статизма; и можно быстро подавлять воздействующий ток, генерируемый во время подключения к сети, благодаря чему обеспечивается надежный пуск системы.
В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S7 управление с обратной связью по компонентам постоянного тока на оси d и компонентам постоянного тока на оси q в координатах dq соответственно выполняют путем двухконтурного управления по напряжению и току для получения значения команды выходного напряжения в осях dq. Конкретными этапами являются следующие: вычисляют разницу между значением
В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S8 значение команды выходного напряжения в координатах dq преобразовывают в значение команды выходного напряжения в координатах αβ посредством обратного преобразования Парка, и значение команды выходного напряжения в координатах αβ преобразовывают в значение команды выходного напряжения в координатах abc посредством обратного преобразования Кларка, при этом формулы преобразования для обратного преобразования Парка имеют вид:
в этих формулах 



Формулы преобразования для обратного преобразования Кларка имеют вид:
в этих формулах 


В предпочтительной реализации вышеупомянутого способа параллельного управления для однофазных инверторов на этапе S9 импульсы SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов генерируют согласно значению команды выходного напряжения в координатах abc. Конкретными этапами являются следующие: создают две синусоидальных модулирующих волны
В варианте осуществления настоящей заявки дополнительно предоставлена система параллельного управления для однофазных инверторов, содержащая:
устройство, выполненное с возможностью получения выходного напряжения и выходного тока каждого из однофазных инверторов;
устройство, выполненное с возможностью восстановления полученной переменной напряжения и полученной переменной тока, виртуализации ортогональных виртуальных величин, причем каждая имеет разность фазы 90 градусов с фазой полученной переменной напряжения или полученной переменной тока соответственно, и моделирования ортогональных компонентов параллельной системы однофазных инверторов в координатах αβ;
устройство, выполненное с возможностью преобразования ортогональных компонентов в координатах αβ в компоненты постоянного тока в координатах dq;
устройство, выполненное с возможностью вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q;
устройство, выполненное с возможностью обнаружения фазы шины переменного тока и управления целевым значением выходного компонента постоянного тока на оси q в координатах dq так, чтобы оно равнялось нулю, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми;
устройство, выполненное с возможностью управления выходной частотой каждого из однофазных инверторов так, чтобы делать выходные фазы множества однофазных инверторов одинаковыми с целью разделения поровну активных мощностей, и управления выходной амплитудой каждого из однофазных инверторов так, чтобы делать амплитуды выходных напряжений множества однофазных инверторов идентичными с целью разделения поровну реактивных мощностей;
устройство, выполненное с возможностью соответственно выполнения управления с обратной связью по компонентам постоянного тока на оси d и компонентам постоянного тока на оси q в координатах dq для получения значения команды выходного напряжения в осях dq;
устройство, выполненное с возможностью преобразования значения команды выходного напряжения в координатах dq в значение команды выходного напряжения в координатах αβ и преобразования значения команды выходного напряжения в координатах αβ в значение команды выходного напряжения в координатах abc; и
блок управления, выполненный с возможностью модулирования и генерирования импульсов SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов согласно значению команды выходного напряжения в координатах abc.
Благодаря использованию вышеупомянутого способа параллельного управления для однофазных инверторов в настоящей заявке множеством однофазных инверторов управляют с обеспечением их параллельного соединения и одновременного запуска в работу, и после возникновения неисправности на одном из однофазных инверторов любой другой однофазный инвертор автоматически принимает на себя нагрузку однофазного инвертора, на котором возникла неисправность, так что проблема, связанная с задержкой при повторном запуске модуля с взаимным резервированием, решается, реализуется реальное бесперебойное электропитание от источника питания, достигается высокая надежность и предотвращается влияние на управление транспортным средством.
В предпочтительной реализации вышеупомянутой системы параллельного управления для однофазных инверторов полученное выходное напряжение и полученный выходной ток каждого из однофазных инверторов включают выходное напряжение и выходной ток в текущий момент, а также выходное напряжение и выходной ток в предыдущий момент. Мгновенную активную мощность и мгновенную реактивную мощность можно вычислить согласно полученным выходным напряжениям и полученным выходным токам в два момента времени, включая текущий момент времени и предыдущий момент времени, вместо общей единицы, так что влияние общей задержки в традиционном вычислении мощности на устойчивость и динамическое свойство устраняется. После внезапного изменения нагрузки мгновенную мощность можно получить в рамках только одного периода, так что сокращается задержка вычисления и свойство динамического слежения является хорошим. Более того, отсутствует необходимость в вычислении тригонометрической функции в режиме реального времени, так что объем вычислений алгоритма управления уменьшается и используется меньше ресурсов DSP.
Как питание управления, так и основное питание однофазных инверторов, представляют собой 48В постоянного тока, обеспечиваемые аккумуляторной батареей, и множество однофазных инверторов одновременно получают питание и запускаются вместе. Однофазные инверторы являются идентичными и в основном идентичными в отношении задержки главной цепи, вследствие чего существует явление, заключающееся в том, что каждый из однофазных инверторов распознает себя как инвертор, запускаемый первым во время пуска. При таком рабочем условии множество однофазных инверторов не являются синхронизированными по фазе, но непосредственно соединяются с сетью во время плавного пуска. Во время плавного пуска выходные напряжения являются очень низкими, вследствие чего как выходные активные мощности, так и реактивные мощности являются очень низкими, эффект статизма является относительно слабым, перераспределение тока однофазных инверторов является плохим, и в таком случае легко возникают выходные колебания, приводя к нарушению параллельной системы. Для усиления эффекта статизма и быстрого подавления воздействующего тока, генерируемого во время подключения к сети, в предпочтительной реализации вышеупомянутой системы параллельного управления для однофазных инверторов система дополнительно содержит устройство, выполненное с возможностью корректировки коэффициентов статизма выходной частоты и выходной амплитуды во время параллельного пуска. Коэффициенты статизма выходной частоты и выходной амплитуды корректируют во время параллельного пуска, благодаря чему эффект статизма усиливается и обеспечивается надежный пуск системы.
Со ссылкой на фиг. 6 в предпочтительной реализации системы параллельного управления для однофазных инверторов система содержит:
устройство для восстановления напряжения и тока, то есть устройство, выполненное с возможностью осуществления восстановления напряжения и тока на полученной переменной напряжения и полученной переменной тока с применением обобщенного интегратора второго порядка, при этом благодаря восстановлению напряжения и тока, реализуемого с применением обобщенного интегратора второго порядка, не только решаются такие проблемы, как задержка фильтрации и плохая способность к динамической реакции, присущие традиционному способу создания ортогональных виртуальных сигналов, но также полученные переменные могут подвергаться адаптивной фильтрации, благодаря чему улучшается способность системы к защите от помех; и созданные ортогональные векторы не только могут реализовывать управление разъединением в осях dq, но и обеспечивают основу для последующего контура фазовой синхронизации, благодаря чему устраняется влияние неблагоприятного фактора, такого как компонент постоянного тока, на точность фазовой синхронизации и эффективно подавляется воздействующий ток, генерируемый во время подключения к цепи;
устройство для преобразования Парка, то есть устройство, выполненное с возможностью преобразования ортогонального компонента в координатах αβ в компонент постоянного тока в координатах dq посредством преобразования Парка;
устройство для вычисления мощности, то есть устройство, выполненное с возможностью вычисления мгновенной активной мощности и мгновенной реактивной мощности с применением напряжений и токов в текущий момент времени и в предыдущий момент времени, при этом мгновенную активную мощность и мгновенную реактивную мощность можно вычислить с применением значений дискретизации в два смежных момента времени вместо общей единицы, так что влияние общей задержки в традиционном вычислении мощности на устойчивость и динамическое свойство устраняется; после внезапного изменения нагрузки мгновенную мощность можно получить в рамках только одного периода, так что сокращается задержка вычисления и свойство динамического слежения является хорошим; более того, отсутствует необходимость в вычислении тригонометрической функции в режиме реального времени, так что объем вычислений алгоритма управления уменьшается и используется меньше ресурсов DSP;
устройство контура фазовой синхронизации, то есть устройство, выполненное с возможностью обнаружения фазы шины переменного тока с применением контура фазовой синхронизации и управления целевым значением выходного компонента постоянного тока на оси q в координатах dq так, чтобы оно равнялось нулю, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми;
устройство для управления статизмом, то есть устройство, выполненное с возможностью управления выходной частотой для разделения поровну активных мощностей и управления выходной амплитудой для разделения поровну реактивных мощностей посредством управления статизмом при синхронном пуске, при этом благодаря применению управления статизмом при синхронном пуске коэффициенты статизма выходной частоты и выходной амплитуды корректируют во время параллельного пуска, так что эффект статизма усиливается и обеспечивается надежный пуск системы;
двухконтурное устройство управления по напряжению и току, то есть устройство, выполненное с возможностью осуществления управления с обратной связью путем двухконтурного управления по напряжению и току для получения значения команды выходного напряжения в осях dq;
устройство преобразования координат, то есть устройство, выполненное с возможностью преобразования значения команды выходного напряжения в координатах dq в значение команды выходного напряжения в координатах αβ посредством обратного преобразования Парка и преобразования значения команды выходного напряжения в координатах αβ в значение команды выходного напряжения в координатах abc посредством обратного преобразования Кларка; и
блок униполярной частотной умножающей модуляции, то есть блок управления, выполненный с возможностью модулирования и генерирования импульсов SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов согласно значению команды выходного напряжения в координатах abc, при этом применяется униполярная частотная умножающая модуляция, так что частоты выходных импульсов однофазных инверторов удваиваются при условии, что частота переключения устройства питания не изменяется, значительно уменьшаются размер и вес фильтра, такого как реактор и конденсатор, и снижаются затраты на однофазные инверторы.
В настоящей заявке дополнительно предоставлен инвертор, содержащий множество параллельных однофазных инверторов, при этом все однофазные инверторы имеют одинаковую конструкцию; инвертор дополнительно содержит систему параллельного управления для однофазных инверторов, и как усилительная цепь прерывателя, так и инверторная цепь каждого из однофазных инверторов соединены с блоком управления системы параллельного управления для однофазных инверторов. Множество однофазных инверторов инвертора характеризуются избыточностью взаимного резервирования. Обычно одновременно запускают в работу множество однофазных инверторов, при этом один из однофазных инверторов подает питание на нагрузку, и после возникновения неисправности на однофазном инверторе любой другой однофазный инвертор переключается контактором для дальнейшей подачи питания на нагрузку. В качестве примера, инвертор содержит два параллельных однофазных инвертора, и обычно одновременно запускают в работу два однофазных инвертора, при этом один из однофазных инверторов подает питание на нагрузку, после возникновения неисправности на однофазном инверторе другой однофазный инвертор взаимно резервируется контактором для дальнейшей подачи питания на нагрузку. Поскольку одновременно запускают в работу множество параллельных однофазных инверторов, уменьшается время сетевого взаимодействия, а надежность пуска является высокой. Во время нормальной работы множество однофазных инверторов работают одновременно, так что решается проблема, связанная с задержкой при повторном запуске существующего модуля с взаимным резервированием, реализуется бесперебойное электропитание от источника питания и предотвращается влияние на управление транспортным средством.
Вышеупомянутые варианты осуществления предназначены для пояснения настоящей заявки, а не для ограничения настоящей заявки. Любые модификации и изменения, внесенные в настоящую заявку в пределах сущности и объема правовой охраны формулы изобретения настоящей заявки, попадают в рамки объема охраны настоящей заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2008 |
|
RU2394346C1 |
| Способ управления инвертором напряжения в системах накопления электрической энергии при резкопеременной нагрузке | 2020 |
|
RU2733999C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХУРОВНЕВЫМ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2024 |
|
RU2834583C1 |
| Способ управления инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии при резкопеременной нагрузке | 2018 |
|
RU2697262C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ТОКА ПРИ ПЕРЕХОДЕ В РЕЖИМ ПЕРЕГРУЗКИ | 2012 |
|
RU2522036C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХУРОВНЕВЫМ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2024 |
|
RU2834630C1 |
| СИЛОВОЕ ПРЕОБРАЗОВАТЕЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2466040C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2491692C2 |
| Устройство отслеживания точки максимальной мощности для инвертора с питанием от солнечных батарей | 2021 |
|
RU2769039C1 |
| Способ прямого бездатчикового управления угловым положением ротора синхронного электродвигателя с постоянными магнитами | 2020 |
|
RU2749454C1 |


Изобретение относится к области электротехники, в частности к способу параллельного управления и системе параллельного управления для однофазных инверторов. Технический результат заключается в повышении надежности непрерывности электропитания. Способ включает: получение выходного напряжения и выходного тока однофазного инвертора; посредством восстановления и преобразования координат преобразование напряжения и тока в статической системе координат abc в систему координат dq и осуществление разъединения напряжения и тока; осуществление преобразования координат для значения команды выходного напряжения контура тока; преобразование значения команды выходного напряжения в системе координат dq в систему координат abc и генерирование модулированной волны для управления переключением устройства питания согласно значению команды выходного напряжения в системе координат abc. Множеством однофазных инверторов управляют так, чтобы одновременно параллельно запускать их в работу. При возникновении неисправности на однофазном инверторе любой другой однофазный инвертор автоматически принимает на себя его нагрузку, благодаря чему преодолевается проблема, связанная с задержкой повторного пуска резервного модуля; в полном смысле реализуется бесперебойное электропитание; надежность является высокой, и отсутствует негативное влияние на движение. 3 н. и 9 з.п. ф-ы, 6 ил.
1. Способ параллельного управления для однофазных инверторов, используемый в параллельной системе однофазных инверторов, содержащей множество однофазных инверторов, для управления выходным напряжением и выходным током каждого из однофазных инверторов и разделения поровну выходных токов множества однофазных инверторов, отличающийся тем, что способ параллельного управления включает следующие конкретные этапы:
получение выходного напряжения и выходного тока каждого из однофазных инверторов в текущий момент времени и в предыдущий момент времени;
восстановление полученной переменной напряжения и полученной переменной тока, виртуализация ортогональных виртуальных величин, причем каждая имеет разность фазы 90 градусов с фазой полученной переменной напряжения или полученной переменной тока соответственно, и моделирование ортогональных компонентов параллельной системы однофазных инверторов в координатах αβ;
преобразование ортогональных компонентов в координатах αβ в компоненты постоянного тока в координатах dq;
вычисление мгновенной активной мощности P и мгновенной реактивной мощности Q, при этом формулы вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q имеют вид:
в этих формулах 





обнаружение фазы шины переменного тока и управление целевым значением выходного компонента постоянного тока на оси q в координатах dq так, чтобы оно равнялось нулю, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми;
управление выходной частотой каждого из однофазных инверторов посредством управления статизмом так, чтобы делать выходные фазы множества однофазных инверторов одинаковыми с целью разделения поровну активных мощностей, и управление выходной амплитудой каждого из однофазных инверторов посредством управления статизмом так, чтобы делать амплитуды выходных напряжений множества однофазных инверторов идентичными с целью разделения поровну реактивных мощностей; и соответствия статизма управления статизмом имеют вид:
в этих формулах 





установление значения 


вычисление фазы 

модулирование и генерирование импульсов SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов согласно значению команды выходного напряжения в координатах abc.
2. Способ параллельного управления для однофазных инверторов по п. 1, отличающийся тем, что полученную переменную напряжения и полученную переменную тока восстанавливают с применением обобщенного интегратора второго порядка, причем обобщенный интегратор второго порядка имеет вход vin и два выхода vo и qvo соответственно, при этом выход vo имеет ту же фазу и амплитуду, что и вход vin, а выход qvo имеет ту же амплитуду, что и вход vin, и имеет запаздывание 90 градусов относительно входа vin по фазе, и передаточные функции между двумя выходами и входом имеют вид:

в этих формулах 

после дискретизации передаточной функции в области s получают следующие разностные уравнения:
 (2)
(2)
в этих формулах 




 представляет выход обобщенного интегратора второго порядка в предыдущий период,
представляет выход обобщенного интегратора второго порядка в предыдущий период,  представляет выход обобщенного интегратора второго порядка в период, предшествующий предыдущему периоду,
представляет выход обобщенного интегратора второго порядка в период, предшествующий предыдущему периоду,  представляет выход обобщенного интегратора второго порядка в текущий период и имеет запаздывание 90 градусов относительно
представляет выход обобщенного интегратора второго порядка в текущий период и имеет запаздывание 90 градусов относительно 


выход обобщенного интегратора второго порядка в текущий период представляют собой дискретизированные ортогональные компоненты, окончательно выдаваемые обобщенным интегратором второго порядка.
3. Способ параллельного управления для однофазных инверторов по п. 2, отличающийся тем, что ортогональные компоненты в координатах αβ преобразуют в компоненты постоянного тока в координатах dq посредством преобразования Парка, при этом формулы преобразования имеют вид:

в этих формулах 



4. Способ параллельного управления для однофазных инверторов по п. 3, отличающийся тем, что фазу шины переменного тока обнаруживают посредством контура фазовой синхронизации и целевым значением выходного компонента постоянного тока на оси q в координатах dq управляют так, чтобы оно равнялось нулю, с помощью ПИ-контроллера, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми; конкретными этапами являются: получение напряжения шины переменного тока и создание ортогонального компонента, имеющего запаздывание 90 градусов относительно напряжения шины в координатах αβ, с использованием обобщенного интегратора второго порядка; преобразование ортогонального компонента в координатах αβ в компоненты постоянного тока в координатах dq посредством преобразования Парка и вычисление компонента
5. Способ параллельного управления для однофазных инверторов по п. 1, отличающийся тем, что коэффициенты статизма при управлении статизмом корректируют в процессе, в котором множество однофазных инверторов запускают параллельно, и откорректированные соответствия статизма имеют вид:

в этих формулах 

6. Способ параллельного управления для однофазных инверторов по п. 1, отличающийся тем, что управление с обратной связью по компонентам постоянного тока на оси d и компонентам постоянного тока на оси q в координатах dq соответственно выполняют путем двухконтурного управления по напряжению и току для получения значения команды выходного напряжения в осях dq; конкретными этапами являются: вычисление разности между значением 





7. Способ параллельного управления для однофазных инверторов по п. 1, отличающийся тем, что значение команды выходного напряжения в координатах dq преобразуют в значение команды выходного напряжения в координатах αβ посредством обратного преобразования Парка и значение команды выходного напряжения в координатах αβ преобразуют в значение команды выходного напряжения в координатах abc посредством обратного преобразования Кларка.
8. Способ параллельного управления для однофазных инверторов по п. 7, отличающийся тем, что импульсы SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов генерируют согласно значению команды выходного напряжения в координатах abc; конкретными этапами являются: создание двух синусоидальных модулирующих волн 






9. Система параллельного управления для однофазных инверторов, отличающаяся тем, что содержит:
устройство, выполненное с возможностью получения выходного напряжения и выходного тока каждого из однофазных инверторов;
устройство, выполненное с возможностью восстановления полученной переменной напряжения и полученной переменной тока, виртуализации ортогональных виртуальных величин, причем каждая имеет разность фазы 90 градусов с фазой полученной переменной напряжения или полученной переменной тока соответственно, и моделирования ортогональных компонентов параллельной системы однофазных инверторов в координатах αβ;
устройство, выполненное с возможностью преобразования ортогональных компонентов в координатах αβ в компоненты постоянного тока в координатах dq;
устройство, выполненное с возможностью вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q согласно формулам вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q; при этом формулы вычисления мгновенной активной мощности P и мгновенной реактивной мощности Q имеют вид:
в этих формулах
устройство, выполненное с возможностью обнаружения фазы шины переменного тока и управления целевым значением выходного компонента постоянного тока на оси q в координатах dq так, чтобы оно равнялось нулю, чтобы делать фазы множества однофазных инверторов, осуществляющих параллельный вывод, одинаковыми;
устройство, выполненное с возможностью управления выходной частотой каждого из однофазных инверторов посредством управления статизмом так, чтобы делать выходные фазы множества однофазных инверторов одинаковыми с целью разделения поровну активных мощностей, и управления выходной амплитудой каждого из однофазных инверторов посредством управления статизмом так, чтобы делать амплитуды выходных напряжений множества однофазных инверторов идентичными с целью разделения поровну реактивных мощностей;
устройство, выполненное с возможностью установления значения
устройство, выполненное с возможностью вычисления фазы согласно выходной частоте каждого из однофазных инверторов, преобразования значения команды выходного напряжения в координатах dq в значение команды выходного напряжения в координатах αβ и преобразования значения команды выходного напряжения в координатах αβ в значение команды выходного напряжения в координатах abc; и
блок управления, выполненный с возможностью модулирования и генерирования импульсов SPWM управляющего сигнала для регулирования выходного напряжения каждого из однофазных инверторов согласно значению команды выходного напряжения в координатах abc.
10. Система параллельного управления для однофазных инверторов по п. 9, отличающаяся тем, что полученное выходное напряжение и полученный выходной ток каждого из однофазных инверторов содержат выходное напряжение и выходной ток в текущий момент времени, а также выходное напряжение и выходной ток в предыдущий момент времени.
11. Система параллельного управления для однофазных инверторов по п. 9, отличающаяся тем, что дополнительно содержит устройство, выполненное с возможностью корректировки коэффициентов статизма выходной частоты и выходной амплитуды во время параллельного пуска.
12. Инвертор, содержащий множество параллельных однофазных инверторов, отличающийся тем, что все однофазные инверторы имеют одинаковую конструкцию, инвертор дополнительно содержит систему параллельного управления для однофазных инверторов и как усилительная цепь прерывателя, так и инверторная цепь каждого из однофазных инверторов соединены с блоком управления системы параллельного управления для однофазных инверторов.
| CN 107069819 A, 18.08.2017 | |||
| EP 1852964 B1, 18.01.2012 | |||
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ И ОДНОФАЗНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ, УПРАВЛЯЕМЫЙ ПО ЭТОМУ СПОСОБУ | 2005 |
|
RU2304839C2 |
| CN 106026744 A, 12.10.2016. | |||

