Изобретение относится к измерительной технике, к способам многоопорного взвешивания с помощью тензорезисторных датчиков веса и может быть использовано в автомобильных, вагонных, промышленных и других платформенных весах, при взвешивании силосов, баков, других емкостей и т.п. объектов.
Известно устройство для многоопорного взвешивания, согласно которому размещают тензорезисторные датчики веса под опорами емкости и по сумме их сигналов судят о весе емкости (заявка США №2010/0193077, US C1, 141/350, опубликована 05.08.10.).
Недостатком этого устройства и реализуемого им способа многоопорного взвешивания является недостаточная точность, связанная с практической невозможностью нагрузить емкость на месте эксплуатации с помощью эталонных гирь и тем самым выполнить поверку датчиков веса в этих условиях. Поэтому по истечении межповерочного интервала датчики веса снимают с места эксплуатации и везут на эталонную силовоспроизводящую установку, где проверяют их метрологические характеристики. Затем датчики веса возвращают и устанавливают на прежние места. При этом по умолчанию считается, что условия на эталонной силовоспроизводящей установке и на месте эксплуатации одинаковы, поэтому погрешность датчиков веса при перестановке не меняется.
Однако условия нагружения датчика веса на эталонной силовоспроизводящей установке и условия нагружения на месте эксплуатации могут отличаться. Это отличие состоит в том, что механические влияющие величины (поперечные силы и моменты, влияющие на погрешность датчика) на эталонной силовоспроизводящей установке и на месте эксплуатации различны вследствие разных углов наклона опор и силовводящих узлов, разности эксцентриситетов измеряемой силы, различной жесткости оснований и т.п. факторов.
Эталонная силовоспроизводящая установка является прецизионным прибором, находящимся под особым контролем, и на ней механические влияющие величины меньше, чем под платформами весов и емкостями, входящими в состав рабочих средств измерений. Поэтому при переносе датчиков веса с места поверки на эталонной силовоспроизводящей установке на место эксплуатации в общем случае возникает дополнительная погрешность.
Чтобы исключить эту дополнительную погрешность, нагружают объект, например автомобильные весы, эталонными гирями, и выполняют поверку в условиях эксплуатации. Но этот способ исключения дополнительной погрешности неприменим в тех случаях, когда большегрузные весы находятся в местности, куда трудно или невозможно доставить нужное количество гирь (например, для вагонных или автомобильных весов до ~80 тонн гирь в отдаленную местность в районе Норильска, Магадана, Камчатки и т.п.). Кроме того, в отличие от автомобильных или вагонных весов с прочной платформой, практически невозможно нагрузить тяжелыми гирями тонкостенную емкость.
Наиболее близким к изобретению по совокупности существенных признаков является устройство по патенту РФ №121570 «Устройство для передачи размера единицы силы, воспроизводимой эталонной силовоспроизводящей установкой», G01L, 1/22, 2012 г.
Согласно этому устройству и реализуемому им способу многоопорного взвешивания размещают многокомпонентные тензорезисторные датчики веса, каждый из которых содержит основной мост тензорезисторов для измерения силы и по два дополнительных моста тензорезисторов, измеряющих моменты сил, приложенных к их силовводящим и опорным узлам на эталонной силовоспроизводящей установке, и судят об измеряемом весе по сумме сигналов основных мостов тензорезисторов всех датчиков, контролируя при этом сигналы дополнительных мостов тензорезисторов. Измерение сигналов дополнительных мостов тензорезисторов позволяет контролировать правильность ориентации многокомпонентных датчиков веса на эталонной силовоспроизводящей машине.
Прототипу присущи следующие недостатки.
Применение этого устройства и реализуемого им способа в условиях эксплуатации не позволяет достигнуть точности, получаемой в условиях эталонной силовоспроизводящей установки. Это связано с невозможностью в эксплуатационных условиях определить по сигналам дополнительных мостов тензорезисторов того момента, когда механические влияющие величины достигают значений, выводящих суммарное значение измеренного веса за пределы допускаемой погрешности. Увеличение механических влияющих величин может быть обусловлено рядом малозаметных дестабилизирующих факторов - просадкой и наклоном фундамента, сдвигом опор датчиков веса, платформы и т.п. воздействиями. Эти дестабилизирующие факторы незаметно снижают точность измерения и делают ненадежным задание межповерочного интервала, когда оператор считает, что результаты взвешивания имеют паспортную точность, а между тем они уже вышли за пределы допусков.
Целью изобретения является повышение точности многоопорного взвешивания и достоверное определение времени окончания межповерочного интервала в условиях эксплуатации
Эта цель достигается тем, что на эталонной силовоспроизводящей установке нагружают многокомпонентные тензорезисторные датчики веса, каждый из которых содержит основной мост тензорезисторов, предназначенный для измерения веса, и дополнительные мосты тензорезисторов, предназначенные для измерения механических влияющих величин, одновременно измеряют сигналы основных и дополнительных мостов тензорезисторов каждого многокомпонентного тензорезисторного датчика веса в условиях эталонной силовоспроизводящей установки, определяют характеристики преобразования основных и дополнительных мостов тензорезисторов, судят об измеряемом весе по сумме сигналов основных мостов тензорезисторов всех многокомпонентных тензорезисторных датчиков веса, для каждого многокомпонентного тензорезисторного датчика веса в условиях эталонной силовоспроизводящей установки определяют функции влияния сигналов дополнительных мостов тензорезисторов на погрешность преобразования основного моста тензорезисторов и предельно допускаемые значения сигналов дополнительных мостов тензорезисторов, при которых погрешность сигнала основного моста тензорезисторов данного многокомпонентного тензорезисторного датчика веса еще не выходит за допускаемые пределы, затем размещают многокомпонентные тензорезисторные датчики веса на месте эксплуатации, одновременно измеряют сигналы основных и дополнительных мостов тензорезисторов каждого датчика веса в условиях эксплуатации, для каждого многокомпонентного тензорезисторного датчика веса и для каждого дополнительного моста тензорезисторов проверяют выполнение неравенств:
Kij≤[Kij]
где обозначено:
Kij - сигнал дополнительного моста тензорезисторов с номером «i» датчика веса с номером «j»,
[Kij] - предельно допускаемое значение сигнала дополнительного моста тензорезисторов с номером «i» многокомпонентного тензорезисторного датчика веса с номером «j», при которых погрешность сигнала основного моста тензорезисторов данного многокомпонентного тензорезисторного датчика веса не выходит за допускаемые пределы,
i - номер дополнительного моста тензорезисторов, i=2, 3, 4,
j - номер многокомпонентного тензорезисторного датчика веса веса, j≥2,
и судят об измеряемом весе только при условии выполнения всех этих неравенств.
Сущность изобретения поясняется чертежами.
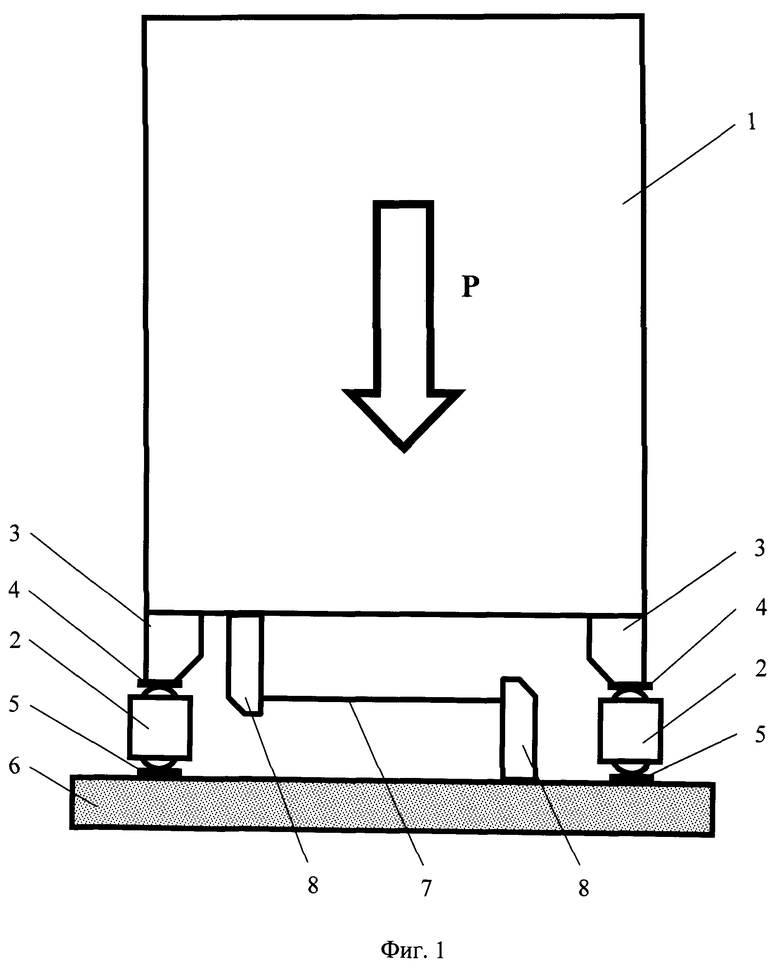
На фиг.1 показана емкость, установленная на многокомпонентные тензорезисторные датчики веса.
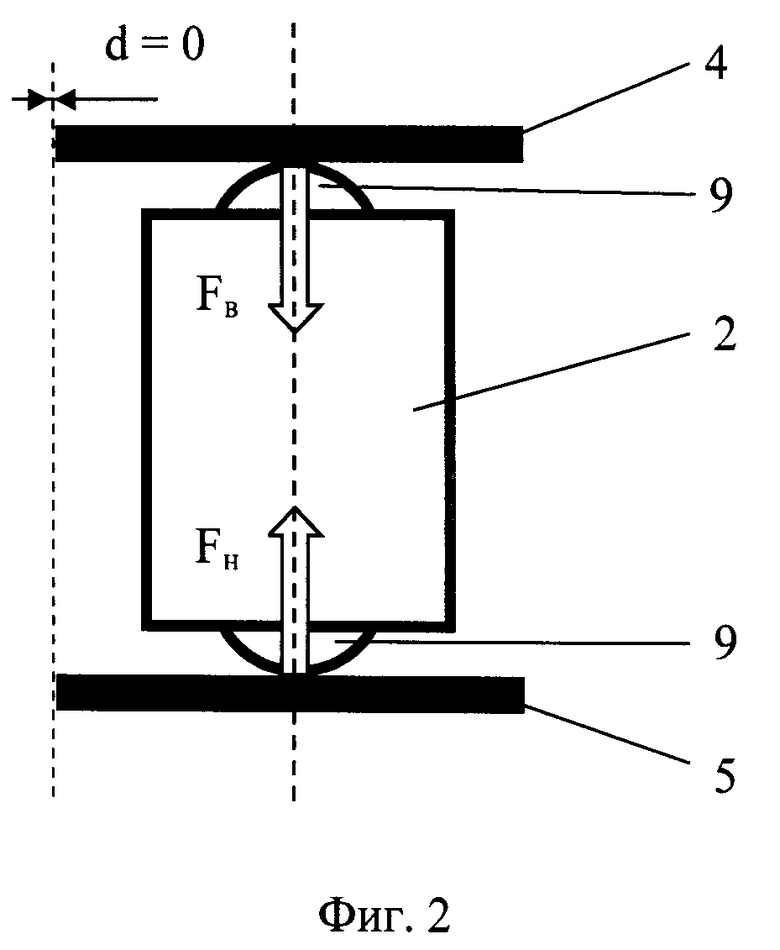
На фиг.2 показано идеальное приложение силы к многокомпонентному тензорезисторному датчику веса.
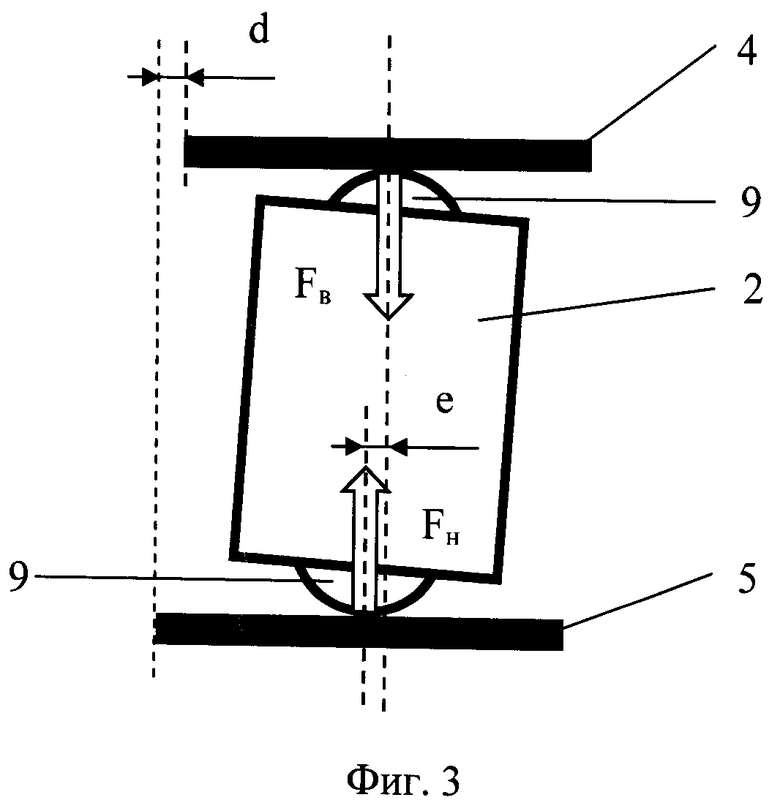
На фиг.3 показан наклон многокомпонентного тензорезисторного датчика веса в случае плоскопараллельного смещения опорных плит относительно друг друга.
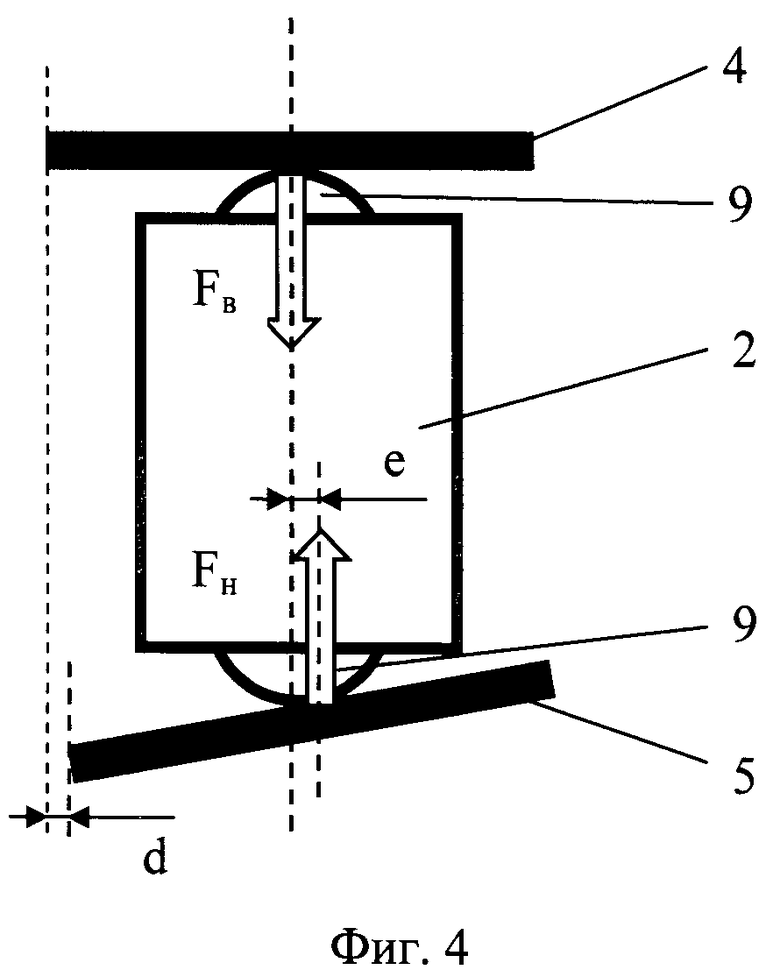
На фиг.4 показано приложение силы к многокомпонентному тензорезисторному датчику веса в случае наклона одной из опорных плит.
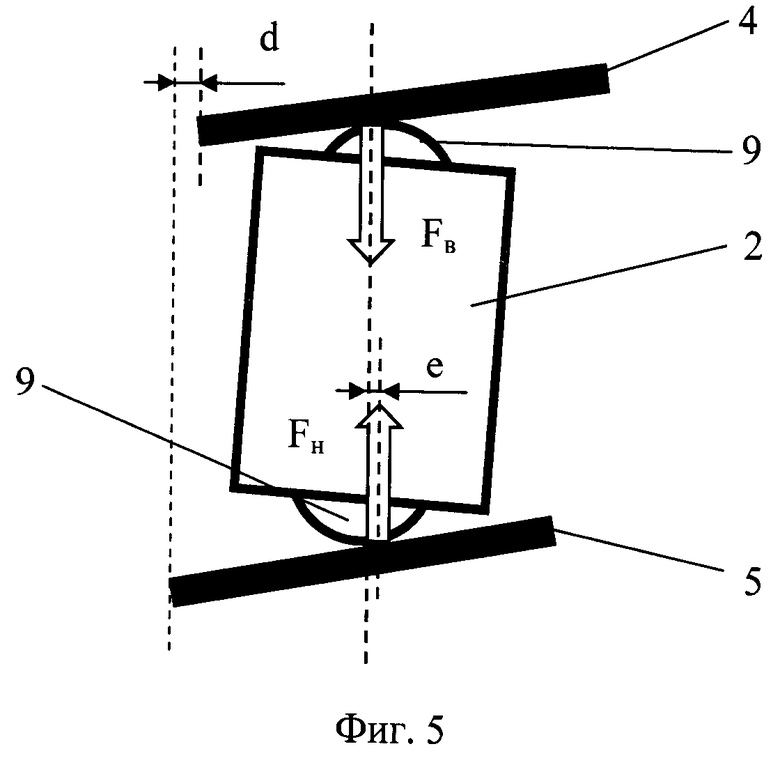
На фиг.5 показано приложение силы к многокомпонентному тензорезисторному датчику веса в случае наклона и взаимного смещения опорных плит.
Реализацию изобретения рассмотрим на примере взвешивания емкости 1, установленной на многокомпонентных тензорезисторных датчиках 2. Измеряемый вес емкости - «Р».
Емкость 1 снабжена стойками 3, к которым прикреплены верхние опорные плиты 4. Нижние опорные плиты 5 размещены на фундаменте 6. Между емкостью 1 и фундаментом 6 находится ограничитель 7 горизонтальных перемещений, прикрепленный к емкости 1 и фундаменту 6 консольными упорами 8. Ограничитель 7 горизонтальных перемещений может быть выполнен в виде шпильки, пластины и т.п. деталей, имеющих высокую жесткость в горизонтальном направлении и малую жесткость в вертикальном направлении.
На фиг.1 показан только один ограничитель 7 горизонтальных перемещений, препятствующий смещению емкости 1 в горизонтальном направлении в плоскости чертежа. Для предотвращения смещения емкости 1 в перпендикулярном направлении, а также ее закручивания вокруг вертикальной оси служат другие ограничители, ориентированные под углами, например, 45° и 90° градусов к плоскости чертежа (на чертеже не показаны).
Многокомпонентные тензорезисторные датчики 2 веса в рассматриваемом примере снабжены стандартными силовводящими и опорными узлами типа сфера-плоскость (датчики выполнены в виде «неваляшка»), т.е. имеют сферические выступы 9.
Согласно изобретению многоопорное взвешивание осуществляется следующим образом.
Первая операция способа - нагружение многокомпонентных тензорезисторных датчиков 2 веса на эталонной силовоспроизводящей установке (на чертежах не показана).
В ходе этого нагружения в условиях эталонной силовоспроизводящей установки одновременно измеряют сигналы основных и дополнительных мостов тензорезисторов каждого многокомпонентного тензорезисторного датчика 2 веса и определяют характеристики преобразования основных и дополнительных мостов тензорезисторов. Для этого, например, нагружают многокомпонентный тензорезисторный датчик 2 с наклоном и со смещениями верхней опорной плиты 4 и наклонами нижних опорных плит 5, как это показано на фиг.2, 3, 4 и 5.
Наклоны и смещения верхних опорных плит 4 и наклоны нижних опорных плит 5 при нагружении многокомпонентных тензорезисторных датчиков 2 веса в условиях эталонной силовоспроизводящей установки, показанные на фиг.2, 3, 4 и 5, имитируют положения этих плит при осадке фундамента 6, при деформации опор 3 и аналогичных дестабилизирующих факторов в условиях эксплуатации.
Смещения верхних опорных плит 4 относительно нижних опорных плит 5 на расстояние «d», показанные на фиг.2, 3, 4 и 5 при нагружении многокомпонентных тензорезисторных датчиков 2 веса в условиях эталонной силовоспроизводящей установки, имитируют влияние температурных изменений размеров емкости 1 и фундамента 6 в условиях эксплуатации. Эти температурные изменения размеров не совпадают вследствие разности температур емкости 1 и фундамента 6 и разных температурных коэффициентов линейного расширения материалов, из которых они изготовлены.
Наклоны и смещения верхних опорных плит 4, наклоны нижних опорных плит 5 вызывают появление эксцентриситета «е» между осью действия силы Fв, приложенной к многокомпонентному тензорезисторному датчику 2 веса сверху, со стороны емкости 1, и осью действия силы Fн - силой реакции опоры, т.е. силы со стороны нижней опорной плиты 5.
Кроме того, в некоторых случаях дополнительно может возникнуть паразитная боковая сила, приложенная к сферическим выступам 9 (на чертежах не показана).
Появление эксцентриситета «е» эквивалентно приложению паразитного изгибающего момента к многокомпонентному тензорезисторному датчику 2 веса. Паразитные изгибающий момент и боковые силы - механические влияющие величины - приводят к появлению сигналов дополнительных мостов тензорезисторов. По этим сигналам определяют функции влияния сигналов дополнительных мостов тензорезисторов на погрешность преобразования основного моста тензорезисторов и предельно допускаемые значения сигналов дополнительных мостов тензорезисторов, при которых погрешность сигнала основного моста тензорезисторов данного многокомпонентного тензорезисторного датчика 2 веса не выходит за допускаемые пределы.
Затем перевозят многокомпонентные тензорезисторные датчики 2 веса на место эксплуатации и устанавливают, например, под емкостью 1.
Далее, уже в условиях эксплуатации, одновременно измеряют сигналы основных и дополнительных мостов тензорезисторов каждого датчика веса, возникающие под действием измеряемого веса «Р» емкости 1. Для каждого многокомпонентного тензорезисторного датчика 2 веса и для каждого дополнительного моста тензорезисторов проверяют выполнение неравенств:

где обозначено:
Kij - сигнал дополнительного моста тензорезисторов с номером «i» датчика веса с номером «j»,
[Kij] - определенные при нагружении в условиях эталонной силовоспроизводящей установки предельно допускаемые значения сигналов дополнительных мостов тензорезисторов с номером «i» многокомпонентного тензорезисторного датчика 2 веса с номером «j», при которых погрешность сигнала основного моста тензорезисторов данного многокомпонентного тензорезисторного датчика 2 веса не выходит за допускаемые пределы,
i - номер дополнительного моста тензорезисторов, i=2, 3, 4,
j - номер многокомпонентного тензорезисторного датчика 2 веса, j≥2.
Если неравенства [1] выполняются, то это означает, что паразитные изгибающий момент и боковые силы - механические влияющие величины - находятся в допускаемых пределах и можно достоверно судить об измеряемом весе «Р» по сигналам основных мостов тензорезисторов. Тем самым появляется возможность продлевать межповерочный интервал, что экономит ресурсы, которые необходимо было бы затратить на преждевременную поверку многокомпонентных тензорезисторных датчиков веса на удаленной эталонной силовоспроизводящей установке.
С другой стороны, допустим, что паразитные изгибающий момент и боковые силы - механические влияющие величины - вышли за допускаемые пределы. Об этом мы узнаем в случае невыполнения неравенств [1].
Следовательно, можно констатировать, что возникли просадки фундамента 1, перекосы и смещения верхних опорных плит 4, смещения нижних опорных плит 5, и далее нельзя достоверно судить об измеряемом весе «Р» по сигналам основных мостов тензорезисторов многокомпонентных тензорезисторных датчиков 2 веса.
Таким образом, межповерочный интервал объективно закончился и необходимо ремонтировать емкость 1, ее опоры 3, фундамент 6, заново снимать многокомпонентные тензорезисторные датчики 2 веса из под емкости 1 и везти их на эталонную силовоспроизводящую установку для поверки и т.п. Это экономит ресурсы за счет предотвращения неверных взвешиваний.
Изобретение позволяет обоснованно определять момент, когда дальнейшее взвешивание становится недостоверным вследствие просадки фундамента 6, перекосов и смещения верхних опорных плит 4, смещения нижних опорных плит 5, и точно определять время необходимого ремонта фундамента 6, емкости 1, верхних опорных плит 4 и нижних опорных плит 5.
Реализация указанных возможностей позволяет повысить точность и снизить затраты на взвешивание.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОТОЧЕЧНЫЙ ЧАСТОТНЫЙ СПОСОБ ИЗМЕРЕНИЯ МАССЫ И ДЕФОРМАЦИЙ | 2014 |
|
RU2576350C1 |
| МНОГОТОЧЕЧНОЕ ЧАСТОТНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ, МАССЫ И ДЕФОРМАЦИЙ | 2015 |
|
RU2584341C1 |
| ИМИТАТОР СИГНАЛОВ МОСТОВЫХ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ | 2016 |
|
RU2620895C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2658124C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН МНОГОТОЧЕЧНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ С КОНТРОЛЕМ ФУНКЦИИ ПРЕОБРАЗОВАНИЯ И ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324899C2 |
| ВЕСЫ РЕЛЬСОВЫЕ ТЕНЗОМЕТРИЧЕСКИЕ | 2018 |
|
RU2685741C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2400711C1 |
| Способ метрологической диагностики измерительных каналов уровня жидкости | 2018 |
|
RU2680852C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2819553C1 |
| Бункерные весы с системой автоматической калибровки | 2024 |
|
RU2828706C1 |
Изобретение относится к измерительной технике, в частности к способам многоопорного взвешивания, и может быть использовано в различных весах платформенного типа. Способ состоит том, что на эталонной силовоспроизводящей установке нагружают многокомпонентные тензорезисторные датчики веса, каждый из которых содержит основной мост тензорезисторов, предназначенный для измерения веса, и дополнительные мосты тензорезисторов, предназначенные для измерения механических влияющих величин. При этом нагружении измеряют сигналы основных и дополнительных мостов тензорезисторов каждого датчика веса, определяют характеристики преобразования основных и дополнительных мостов тензорезисторов, для каждого многокомпонентного тензорезисторного датчика веса определяют функции влияния сигналов дополнительных мостов тензорезисторов на погрешность преобразования основного моста тензорезисторов, и предельно допускаемые значения сигналов дополнительных мостов тензорезисторов, при которых погрешность сигнала основного моста тензорезисторов данного многокомпонентного тензорезисторного датчика веса не выходит за допускаемые пределы. На месте эксплуатации судят об измеряемом весе по сумме сигналов основных мостов тензорезисторов всех многокомпонентных тензорезисторных датчиков веса при определенном заранее условии предельно допускаемого значения сигнала дополнительного моста тензорезисторов, при которых погрешность сигнала основного моста тензорезисторов данного многокомпонентного тензорезисторного датчика веса не выходит за допускаемые пределы. Технический результат заключается в повышении точности взвешивания и достоверного определения межповерочного интервала для весов. 5 ил.
Способ многоопорного взвешивания, состоящий в том, что на эталонной силовоспроизводящей установке нагружают многокомпонентные тензорезисторные датчики веса, каждый из которых содержит основной мост тензорезисторов, предназначенный для измерения веса, и дополнительные мосты тензорезисторов, предназначенные для измерения механических влияющих величин, одновременно измеряют сигналы основных и дополнительных мостов тензорезисторов каждого датчика веса в условиях эталонной силовоспроизводящей установки, определяют характеристики преобразования основных и дополнительных мостов тензорезисторов, судят об измеряемом весе по сумме сигналов основных мостов тензорезисторов всех многокомпонентных тензорезисторных датчиков веса, отличающийся тем, что с целью повышения точности измерения и достоверного определения времени окончания межповерочного интервала в условиях эксплуатации для каждого многокомпонентного тензорезисторного датчика веса в условиях эталонной силовоспроизводящей установки определяют функции влияния сигналов дополнительных мостов тензорезисторов на погрешность преобразования основного моста тензорезисторов и предельно допускаемые значения сигналов дополнительных мостов тензорезисторов, при которых погрешность сигнала основного моста тензорезисторов данного многокомпонентного тензорезисторного датчика веса не выходит за допускаемые пределы, размещают многокомпонентные тензорезисторные датчики веса на месте эксплуатации, одновременно измеряют сигналы основных и дополнительных мостов тензорезисторов каждого многокомпонентного тензорезисторного датчика веса в условиях эксплуатации, для каждого многокомпонентного тензорезисторного датчика веса и для каждого дополнительного моста тензорезисторов проверяют выполнение неравенств:
Kij≤[Kij]
где обозначено:
Кij - сигнал дополнительного моста тензорезисторов с номером «i» датчика веса с номером «j»,
[Kij] - определенное в условиях эталонной силовоспроизводящей установки предельно допускаемое значение сигнала дополнительного моста тензорезисторов с номером «i» многокомпонентного тензорезисторного датчика веса с номером «j», при которых погрешность сигнала основного моста тензорезисторов данного многокомпонентного тензорезисторного датчика веса не выходит за допускаемые пределы,
i - номер дополнительного моста тензорезисторов, i=2, 3, 4,
j - номер многокомпонентного тензорезисторного датчика веса, j≥2, и судят об измеряемом весе только при условии выполнения всех этих неравенств.
| УСТРОЙСТВО ДЛЯ РАСШИФРОВКИ ФОТООСЦИЛЛОГРАММ ДВИЖЕНИЯ ТОЧЕК ЛОПАСТЕЙ ВИНТА ВЕРТОЛЕТА | 1956 |
|
SU121570A1 |
| US 20100193077 A1 05.08.2010; | |||
| Тензометрическое устройство | 1989 |
|
SU1679224A1 |
| Устройство для измерения динамических нагрузок | 1987 |
|
SU1415085A1 |

