Предлагаемые способ и устройство относятся к области навигационных измерений и могут быть использованы в наземном комплексе управления орбитальной группировкой навигационных космических аппаратов (НКА) при выполнении эфемеридного и частотно-временного обеспечении НКА системы глобальной навигационной системы (ГНС) ГЛОНАСС.
Известны способы и устройства измерения параметров движения космических объектов (патенты РФ № №3032915, 2082090, 2086918, 2087003, 2091711, 2195781, 2211460, 2309431, 2394255; патенты США №№4905009, 5179286, 6111536, 6140982, 6784787; патент Франции №2701769; патент ЕР №1022581; патент WO №0048132. 1. Шебшаевич B.C., Дмитриев П.П. и другие. Сетевые спутниковые радионавигационные системы. - М.: Радио и связь, 1982, С.111-116. 2. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И.Перова и В.Н.Харисова. Изд. 4-е, перераб. и доп. - М.: Радиотехника,2010, 800 с и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются «Запросный способ измерения радиальной скорости и система для его осуществления» (патент РФ №2309431, G01S 17/78, 2006), которые и выбраны в качестве прототипов.
Известные способ и устройство используются для обеспечения безопасности полетов летательных аппаратов, для контроля за сближением и стыковкой космических аппаратов.
Однако известные технические решения могут обеспечить измерение радиальной скорости и дальности от спутника навигационной системы ГЛОНАСС до наземного пункта контроля. Кроме того, приемники, входящие в состав системы, реализующей предлагаемый способ, построены по супергетеродинной схеме, в которой одно и то же значение третьей промежуточной частоты ωпр3 может быть получено при приеме сигналов на следующих частотах: ω1, ω2, ωЗ1, ωЗ2:

Следовательно, если частоты настройки ω1 и ω2 принять за основные каналы приема, то наряду с ними существуют и зеркальные каналы приема, частоты которых ωЗ1 и ωЗ2 расположены симметрично (зеркально) относительно частот ωГ1 и ωГ2 гетеродинов (фиг.3). Преобразование по зеркальным каналам приема происходит с тем же коэффициентом преобразования Кпр, что и по основным каналам. Поэтому зеркальные каналы приема наиболее существенно влияют на избирательность и помехоустойчивость супергетеродинных приемников.
Кроме зеркальных существуют и другие дополнительные (комбинационные) каналы приема.
В общем виде любой комбинационный канал приема имеет место при выполнении условия:

где ωKi - частота i-го комбинационного канала приема;
m, n, i - целые положительные числа.
Наиболее вредными комбинационными каналами приема являются каналы, образующиеся при взаимодействии первых гармоник частот сигналов с гармониками частот гетеродинов малого порядка (второй, третьей), так как чувствительность приемников по этим каналам близка к чувствительности основных каналов.
Так, четырем комбинационным каналам при m=1 и n=2 соответствуют частоты (фиг.3):

Наличие ложных сигналов (помех), принимаемых по дополнительным каналам, приводит к снижению помехоустойчивости, надежности дуплексной радиосвязи между наземным пунктом контроля и спутником навигационной системы ГЛОНАСС, а также точности измерения дальности и радиальной скорости, азимута и угла места спутника навигационной системы.
Технической задачей изобретения является расширение функциональных возможностей известных технических решений и повышение помехоустойчивости, надежности дуплексной радиосвязи между наземным пунктом контроля и спутником навигационной системы ГЛОНАСС и точности измерения радиальной скорости и местоположения спутника навигационной системы ГЛОНАСС путем точного и однозначного измерения азимута и угла места навигационного спутника и подавления ложных сигналов (помех), принимаемых по дополнительным каналам.
Поставленная задача решается тем, что запросный способ измерения радиальной скорости и местоположения спутника навигационной системы ГЛОНАСС, заключающийся, в соответствии с ближайшим аналогом, в использовании двух объектов, при этом на первом объекте запросный сигнал на частоте ωс манипулируют по фазе на 180° псевдослучайной последовательностью максимальной длительности, формируют тем самым сложный сигнал с фазовой манипуляцией, преобразуют его по частоте с использованием частоты ωГ1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωc+ωГ1=ω1, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1, улавливают ретранслятором второго объекта, усиливают по мощности, преобразуют по частоте с использованием частоты ωГ3 третьего гетеродина, выделяют напряжение второй промежуточной частоты ωпр1=ωпр1-ωГ3=ω2, усиливают по мощности, излучают в эфир на частоте ω2=ωпр2, улавливают блоком запроса первого объекта, усиливают по мощности преобразуют по частоте с использованием частоты ωГ2 второго гетеродина, выделяют первое напряжение третьей промежуточной частоты ωпр3±ΩД=ωГ2-ω2, умножают и делят его по фазе на два, выделяют гармоническое колебание на частоте ωпр3±ΩД, сравнивают его по частоте с запросным сигналом на частоте ωс, выделяют доплеровскую частоту ±ΩД и по величине и знаку доплеровской частоты определяют величину и направление радиальной скорости, одновременно сложный сигнал с фазовой манипуляцией на частоте ωс пропускают через первый блок регулируемой задержки, перемножают его с первым напряжением третьей промежуточной частоты, выделяют низкочастотное напряжение, формируя тем самым первую корреляционную функцию R1(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают первую корреляционную функцию R1(τ) на максимальном уровне, фиксируют временную задержку τЗ1 между запросным и ретранслированным сигналами и по ее значению определяют расстояние между объектами, отличается от ближайшего аналога тем, что качестве первого объекта используют наземный пункт контроля, а в качестве второго объекта используют спутник навигационной системы ГЛОНАСС, при этом на наземном пункте контроля принимаемый на частоте ω2=ωпр2 и усиленный по мощности сигнал преобразуют по частоте с использованием частоты ωГ4 четвертого гетеродина, выделяют второе напряжение третьей промежуточной частоты ωпр3=ω2-ωГ4, перемножают его с первым напряжением третьей промежуточной частоты, выделяют низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ), сравнивают его с пороговым напряжением Uпор и в случае его превышения разрешают дальнейшую обработку принимаемого сигнала, улавливают сигнал на частоте ω2=ωпр2 на две приемные антенны, усиливают его по мощности, преобразуют по частоте с использованием частоты ωГ2 второго гетеродина, выделяют третье и четвертое напряжения третьей промежуточной частоты ωпр3=ωГ2-ω2 соответственно, перемножают их с первым напряжением третьей промежуточной частоты, пропущенным через второй и третий блоки регулируемой задержки, выделяют низкочастотные напряжения, формируя тем самым третью R3(τ) и четвертую R4(τ) корреляционные функции, изменением задержки поддерживают третью R3(τ) и четвертую R4(τ) корреляционные функции на максимальном уровне, фиксируют время задержки τЗ2 и τЗ3 между ретранслированными сигналами и по их значению определяют азимут и угол места спутника навигационной системы ГЛОНАСС, причем частоты ωГ2 и ωГ4 второго и четвертого гетеродинов разносят на удвоенное значение третьей промежуточной частоты ωГ2-ωГ4=2ωпр3 и выбирают симметричными относительно частоты ω2 принимаемого сигнала
ω2-ωГ4=ωГ2-ω2=ωпр3,
первую приемопередающую и две приемные антенны размещают в виде геометрического прямого угла, в вершине которого помещают первую приемопередающую антенну, общую для приемных антенн, размещенных в азимутальной и угломестной плоскостях соответственно, на спутнике навигационной системы ГЛОНАСС принимаемый на частоте ω1=ωпр1 и усиленный по мощности сигнал преобразуют по частоте с использованием частоты ωГ5 пятого гетеродина, выделяют пятое напряжение третьей промежуточной частоты ωпр3=ωГ5-ω1, перемножают его с напряжением второй промежуточной частоты, выделяют низкочастотное напряжение, пропорциональное пятой корреляционной функции R5(τ), сравнивают его с пороговым напряжением Uпор и в случае его превышения разрешают дальнейшую обработку принимаемого сигнала, причем частоты ωГ3 и ωГ5 третьего и пятого гетеродинов разносят на частоту ω1 принимаемого сигнала ωГ5-ωГ3=ω1.
Поставленная задача решается тем, что система для измерения радиальной скорости и местоположения спутника навигационной системы ГЛОНАСС, содержащая, в соответствии с ближайшим аналогом, два объекта, при этом первый объект содержит последовательно включенные задающий генератор, фазовый манипулятор, второй вход которого соединен с выходом регистра сдвига, первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, первый дуплексер, вход-выход которого связан с первой приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, и первый усилитель третьей промежуточной частоты, последовательно включенные удвоитель фазы, делитель фазы на два, первый узкополосный фильтр, четвертый смеситель, второй вход которого соединен с выходом задающего генератора, второй узкополосный фильтр и измеритель частоты Доплера, последовательно подключенные к выходу фазового манипулятора первый блок регулируемой задержки, первый перемножитель, первый фильтр нижних частот и первый экстремальный регулятор, выход которого соединен с вторым входом первого блока регулируемой задержки, к второму входу которого подключен индикатор дальности, второй объект содержит последовательно включенные третий гетеродин, третий смеситель, усилитель второй промежуточной частоты, последовательно включенные четвертый усилитель мощности, второй дуплексер, вход-выход которого связан с второй приемопередающей антенной, и третий усилитель мощности, выход которого соединен с вторым входом третьего смесителя, отличается от ближайшего аналога тем, что она снабжена четвертым и пятым гетеродинами, пятым, шестым, седьмым и восьмым смесителями, вторым, третьим, четвертым и пятым усилителями третьей промежуточной частоты, вторым, третьим, четвертым и пятым корреляторами, двумя пороговыми блоками, двумя ключами, вторым и третьим перемножителями, вторым и третьим фильтрами нижних частот, вторым и третьим экстремальными регуляторами, двумя приемными антеннами, пятым шестым усилителями мощности, указателем азимута, указателем угла места, причем к выходу второго усилителя мощности последовательно подключены пятый смеситель, второй вход которого соединен с выходом четвертого гетеродина, второй усилитель третьей промежуточной частоты, второй коррелятор, второй вход которого соединен с выходом первого усилителя третьей промежуточной частоты, первый пороговый блок и первый ключ, второй вход которого соединен с выходом первого усилителя, через второй блок регулируемой задержки соединен с выходом первого ключа, второй фильтр нижних частот и второй экстремальный регулятор, выход которого соединен с вторым входом второго блока регулируемой задержки, к второму выходу которого подключен указатель азимута, к выходу второй приемной антенны последовательно подключены шестой усилитель мощности, седьмой смеситель, второй вход которого соединен с выходом второго гетеродина, четвертый усилитель третьей промежуточной частоты, третий перемножитель, второй вход которого через третий блок регулируемой задержки соединен с выходом первого ключа, третий фильтр нижних частот и третий экстремальный регулятор, выход которого соединен с вторым входом третьего блока регулируемой задержки, к второму выходу которого подключен указатель угла места, к выходу третьего усилителя мощности последовательно подключены восьмой смеситель, второй вход которого соединен с выходом пятого гетеродина, пятый усилитель третьей промежуточной частоты, пятый коррелятор, второй вход которого соединен с выходом усилителя второй промежуточной частоты, второй пороговый блок и второй ключ, второй вход которого соединен с выходом усилителя второй промежуточной частоты, а выход подключен к входу четвертого усилителя мощности, в качестве первого объекта использован наземный пункт контроля, а в качестве второго объекта использован спутник навигационной системы ГЛОНАСС, первая приемопередающая антенна, первая и вторая приемные антенны размещены в виде геометрического прямого угла, в вершине которого помещена первая приемопередающая антенна, общая для первой и второй приемных антенн, размещенных в азимутальной и угломестной плоскостях соответственно.
Система, реализующая предлагаемый способ, содержит наземный пункт контроля и спутник навигационной системы ГЛОНАСС.
Структурная схема наземного пункта контроля представлена на фиг.1. Структурная схема спутника (ретранслятора) навигационной системы ГЛОНАСС представлена на фиг.2. Частотные диаграммы, иллюстрирующие преобразование сигналов, изображены на фиг.3, 4 и 5.
Взаимное расположение первой приемопередающей антенны 9, первой 39 и второй 40 приемных антенн показано на фиг.6.
Наземный пункт контроля содержит последовательно включенные задающий генератор 1, фазовый манипулятор 3, второй вход которого соединен с выходом регистра 2 сдвига, первый смеситель 5, второй вход которого соединен с выходом первого гетеродина 4, усилитель 6 первой промежуточной частоты, первый усилитель 7 мощности, первый дуплексер 8, вход-выход которого связан с первой приемопередающей антенной 9, второй усилитель 10 мощности, второй смеситель 12, второй вход которого соединен с выходом второго гетеродина 11, первый усилитель 13 третьей промежуточной частоты, второй коррелятор 36, первый пороговый блок 37, первый ключ 38, второй вход которого соединен с выходом первого усилителя 13 третьей промежуточной частоты, первый перемножитель 21, второй вход которого через первый блок 24 регулируемой задержки соединен с выходом фазового манипулятора 3, первый фильтр 22 нижних частот и третий экстремальный регулятор 23, выход которого соединен с вторым входом первого блока 24 регулируемой задержки, к второму входу которого подключен индикатор 25 дальности. К выходу второго усилителя 10 мощности последовательно подключены пятый смеситель 34, второй вход которого соединен с выходом четвертого гетеродина 33, и второй усилитель 35 третьей промежуточной частоты, выход соединен с вторым входом второго коррелятора 36. К выходу первого ключа 38 последовательно подключены удвоитель 14 фазы, делитель 15 фазы на два, первый узкополосный фильтр 16, четвертый смеситель 17, второй вход которого соединен с выходом задающего генератора 1, второй узкополосный фильтр 18 и измеритель 19 частоты Доплера. К выходу первой приемной антенны 39 последовательно подключены пятый усилитель 41 мощности, шестой смеситель 43, второй вход которого соединен с выходом второго гетеродина 11, третий усилитель 45 третьей промежуточной частоты, второй перемножитель 49, второй вход которого через второй блок 55 регулируемой задержки соединен с выходом первого ключа 38, второй фильтр 51 нижних частот и второй экстремальный регулятор 53, выход которого соединен с вторым входом блока 55 регулируемой задержки, к второму выходу которого подключен указатель 57 азимута. К выходу второй приемной антенны 40 последовательно подключены шестой усилитель 42 мощности, седьмой смеситель 44, второй вход которого соединен с выходом второго гетеродина 11, четвертый усилитель 46 третьей промежуточной частоты, третий перемножитель 50, второй вход которого через третий блок 56 регулируемой задержки соединен с выходом первого ключа 38, третий фильтр 52 нижних частот и третий экстремальный регулятор 54, выход которого соединен с вторым входом третьего блока 56 регулируемой задержки, к второму выходу которого подключен указатель 58 угла места.
Первый перемножитель 21, первый фильтр 22 нижних частот, первый экстремальный регулятор 23 и первый блок 24 регулируемой задержки образуют первый коррелятор 20.
Второй перемножитель 49, второй фильтр 51 нижних частот, второй экстремальный регулятор 53 и второй блок 55 регулируемой задержки образуют третий коррелятор 47.
Третий перемножитель 50, третий фильтр 52 нижних частот, третий экстремальный регулятор 54 и третий блок 56 регулируемой задержки образуют четвертый коррелятор 48.
Первая приемопередающая антенна 9, первая 30 и вторая 40 приемные антенны размещены в виде геометрического прямого угла, в вершине которого помещена первая приемопередающая антенна 9, общая для приемных антенн 39 и 40, размещенных в азимутальной и угломестной плоскостях соответственно.
Спутник (ретранслятор) навигационной системы ГЛОНАСС содержит последовательно включенные третий гетеродин 29, третий смеситель 30, усилитель 31 второй промежуточной частоты, пятый коррелятор 62, второй пороговый блок 63, второй ключ 64, второй вход которого соединен с выходом усилителя второй промежуточной частоты, четвертый усилитель 32 мощности, второй дуплексер 27, вход-выход которого связан со второй приемопередающей антенной 26 и третий усилитель 28 мощности, выход которого соединен с вторым входом третьего смесителя 30. К выходу третьего усилителя 28 мощности последовательно подключены восьмой смеситель 60, второй вход которого соединен с выходом пятого гетеродина 59, и пятый усилитель 61 третьей промежуточной частоты, выход которого соединен с вторым входом пятого коррелятора 62.
Предлагаемый способ реализуется системой, которая работает следующим образом.
На наземном пункте контроля с помощью задающего генератора 1 формируется высокочастотное колебание

где Uc, ωс, φс, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания,
которое поступает на первый вход фазового манипулятора 3. На второй вход последнего подается псевдослучайная последовательность (ПСП) максимальной длительности M(t) с выхода регистра 2 сдвига, охваченного логической обратной связью. Обратная связь осуществляется путем сложения по модулю два выходных напряжений двух или более каскадов и подачи результирующего напряжения на вход первого каскада. Период повторения (длительность) такой кодовой последовательности n=2n-1, где n - число каскадов регистра 2 сдвига.
На выходе фазового манипулятора 3 образуется сложный сигнал с фазовой манипуляцией (ФМн)

где φk(t)={0,π}- манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с ПСП M(t), причем φк(t)=const при kτЭ<t<(k+1)τэ, и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками (k=1, 2, …, N);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Tc=τN).
Этот сигнал поступает на первый вход первого смесителя 5, на второй вход которого подается напряжение первого гетеродина 4

На выходе смесителя 5 образуются напряжения комбинационных частот. Усилителем 6 выделяется напряжение первой промежуточной (суммарной) частоты

где 
ωпр1=ω1+ωГ1=ω1 - первая промежуточная (суммарная) частота;
φпр1=φс+φГ1,
которое после усиления в первом усилителе 7 мощности через дуплексер 8 поступает в первую приемопередающую антенну 9, излучается ею в эфир на частоте ω1, улавливается второй приемопередающей антенной 26 спутника навигационной системы ГЛОНАСС и через дуплексер 27 и третий усилитель 28 мощности поступает на первые входы третьего 30 и восьмого смесителей, на вторые входы которых подаются напряжения третьего 29 и пятого 59 гетеродинов соответственно:


причем частоты ωГ3 и ωГ5 гетеродинов 29 и 59 разнесены на значение частоты ω1=ωпр1 принимаемого сигнала ωГ5-ωГ3=ω1=ωпр1.
На выходе смесителей 30 и 30 образуются напряжения второй и третьей промежуточных частот:


где 
ωпр3=ωпр1-ωГ3=ωГ5-ωпр1=ω2 - третья промежуточная (разностная) частота,
φпр2=φпр1-φГ3, φпр3=φГ5-φпр1.
Эти напряжения выделяются усилителями 31 и 61 второй и третьей промежуточных частот и поступают на два входа пятого коррелятора 62, на выходе которого образуется низкочастотное напряжение, пропорциональное пятой корреляционной функции R5(τ). Так как канальные напряжения Uпр2(t) и Uпр3(t) образованы одним и тем же ФМн-сигналом, принимаемым по основному каналу на частоте ω2,то между указанными канальными напряжениями существуют сильная корреляционная связь. Выходное напряжение коррелятора 62 достигает максимального значения и превышает пороговое напряжение Uпор в пороговом блоке 63. Пороговый уровень Uпор превышается только при максимальном значении выходного напряжения коррелятора 62. Следует также отметить, что корреляционная функция R5(t) сложных ФМн-сигналов обладает замечательным свойством: она имеет значительный по уровню главный лепесток и низкий уровень боковых лепестков. При превышении порогового уровня Uпор в пороговом блоке 63 формируется постоянное напряжение, которое поступает на управляющий вход ключа 64 и открывает его. В исходном состоянии ключ 64 всегда закрыт. При этом напряжение второй промежуточной частоты Uпр2(t) с выходом усилителя 31 второй промежуточной частоты через открытый ключ 64, усилитель 32 мощности и дуплексер 27 поступает в приемопередающую антенну 26, излучается ею в эфир на частоте ω2=ωпр2 и улавливается антеннами 9, 39 и 40 соответственно.



где ±ΩД - доплеровское смещение частоты,

R - дальность от наземного пункта контроля до спутника навигационной системы ГЛОНАСС,
с - скорость распространения радиоволн,
τЗ2=t1-t2;
τЗ3=t1-t3;
t1, t2, t3 - время прохождения ретранслированного сигнала от спутника до антенн 9, 39 и 40 соответственно.
Указанные сигналы с выхода антенн 9, 39 и 40 через дуплексер 8, усилители 10, 41 и 42 мощности поступают на первые входы смесителей 12, 34, 43 и 44, на вторые входы которых подаются напряжения гетеродинов 11 и 33:


Причем частоты ωГ2 и ωГ4 гетеродинов разнесены на удвоенное значение третьей промежуточной частоты ωГ2-ωГ4=2ωпр3 и выбраны симметричными относительно частоты ω2=ωпр2 принимаемого сигнала ωГ2-ω2=ω2-ωГ4=ωпр3. Это обстоятельство приводит к увеличению количества дополнительных каналов приема, но создает благоприятные условия для их подавления за счет корреляционной обработки канальных напряжений.
На выходе смесителей 12, 34, 43 и 44 образуются напряжения комбинационных частот. Усилителями 13, 35, 45 и 46 выделяются напряжения третьей промежуточной (разностной) частоты:




где 



ωпр3=ωГ2-ω2=ω2-ωГ4=ωс - третья промежуточная (разностная) частота;
φпр3=φГ2-φпр2; φпр4=φпр2-φГ4.
Напряжения Uпр4(t) и Uпр5(t) с выхода усилителей 13 и 35 третьей промежуточной частоты поступают на два входа второго коррелятора 36, на выходе которого выделяется низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ). Так как канальные напряжения uпр4(t) и uпр5(t) образованы одним и тем же сложным ФМн-сигналом, принимаемым по основному каналу на частоте ω2, то между указанными канальными напряжениями существует сильная корреляционная связь. Выходное напряжение коррелятора 36 достигает максимального значения и превышает пороговое напряжение Uпор в пороговом блоке 37. В последнем формируется постоянное напряжение, которое поступает на управляющий вход ключа 38 и открывает его. В исходном состоянии ключ 38 всегда закрыт. При этом напряжение uпр4(t) с выхода усилителя 13 третьей промежуточной частоты через открытый ключ 38 поступает на первый вход первого перемножителя 21, на вход удвоителя 14 фазы, на первые входы второго 55 и третьего 56 блоков регулируемой задержки.
На выходе удвоителя 14 фазы, в качестве которого может использоваться перемножитель, на два входа которого подается одно и то же напряжение Uпр4(t), образуется гармоническое колебание

где 
в котором фазовая манипуляция уже отсутствует, так как 2φk(t-τЗ1)={0,2π}.
Ширина спектра Δfc сложного ФМн-сигнала определяется длительностью τЭ его элементарных посылок Δfc=1/τЭ,
тогда как ширина спектра Δf2 его второй гармоники определяется длительностью сигнала Tc и равна Δf2=1/Тс.
Следовательно, при удвоении фазы сложного ФМн-сигнала его спектр сворачивается в N раз

Это колебание поступает на вход делителя 15 фазы на два, на выходе которого образуется гармоническое колебание

которое выделяется первым узкополосным фильтром 16 и поступает на первый вход четвертого смесителя 17. На второй вход последнего в качестве напряжения гетеродина подается запросный сигнал uc(t) с выхода задающего генератора 1. На выходе смесителя 17 образуются напряжения комбинационных частот. Вторым узкополосным фильтром 18 выделяется напряжение доплеровской частоты

где 
φ6=φс-φпр3.
Это напряжение поступает на вход измерителя 19 доплеровской частоты, который обеспечивает измерение доплеровской частоты ±ΩД. Причем величина и знак доплеровской частоты определяют величину и направление радиальной скорости спутника навигационной системы ГЛОНАСС.
Одновременно первое напряжение третьей промежуточной частоты Uпр4(t) с выхода первого усилителя 13 третьей промежуточной частоты через открытый ключ 38 поступает на первый вход перемножителя 21, на второй вход которого через первый блок 24 регулируемой задержки с выхода фазового манипулятора 3 подается сложный ФМн-сигнал uc1(t). Полученное на выходе перемножителя 21 напряжение пропускается через первый фильтр 22 нижних частот, на выходе которого формируется первая корреляционная функция R1(τ), где τ - текущая временная задержка. Первый экстремальный регулятор 23, предназначенный для поддержания максимального значения первой корреляционной функции R1(τ) и подключенный к выходу первого фильтра 22 нижних частот, воздействует на управляющий вход первого блока 24 регулируемой задержки и поддерживает вводимую им задержку τ равной τЗ1(τ=τЗ1), что соответствует максимальному значению первой корреляционной функции R1(τ). Индикатор дальности 25, связанный со шкалой первого блока 24 регулируемой задержки, позволяет непосредственно считывать измеренную дальность D от наземного пункта контроля до спутника навигационной системы ГЛОНАСС

Следовательно, задача измерения указанной дальности D сводится к измерению временной задержки ретранслированного сигнала относительно запросного.
Напряжения uпр6(t) и uпр7(t) с выхода усилителей 45 и 46 третьей промежуточной частоты поступают на первые входы перемножителей 49 и 50 соответственно, на вторые входы ключа 38 напряжение uпр4(t). В этом случае шкалы второго 55 и третьего 56 блоков регулируемой задержки градуируются непосредственно в значениях угловых координат

где α, β - азимут и угол места спутника навигационной системы ГЛОНАСС;
с - скорость распространения радиоволн;
τЗ2=t1-t2; τЗ3=t1-t3;
t1, t2, t3 - время прохождения ретранслированного сигнала от спутника до антенн 9, 39 и 40 соответственно.
Значения α и β фиксируются указателями азимута 57 и угла места 58.
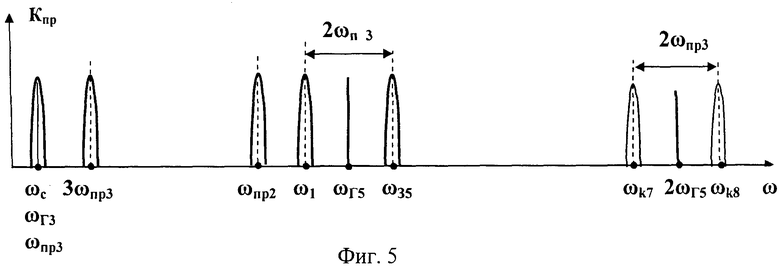
Описанная выше работа системы соответствует случаю приема полезных ФМн-сигналов по основным каналам на частотах ω1 и ω2 (фиг.4, 5).
Если ложный сигнал (помеха) принимается по второму зеркальному каналу на частоте ωЗ2 (фиг.4)

то усилителями 13 и 35 выделяются следующие напряжения:


где 

ωпр3=ωЗ2-ωГ2 - третья промежуточная частота;
3ωпр3=ωЗ2-ωГ4 - утроенное значение третьей промежуточной частот;
φпр8=φЗ2-φГ2; φпр9=φЗ2-φГ4.
Однако только напряжение uпр8(t) попадает в полосу пропускания усилителя 13 третьей промежуточной частоты.
Выходное напряжение коррелятора 36 равно нулю. Ключ 38 не открывается и ложный сигнал (помеха) uЗ2(1), принимаемый по второму зеркальному каналу на частоте ωЗ2, подавляется.
Если ложный сигнал (помеха) принимаемая по третьему зеркальному каналу на частоте ωЗ3

то усилителями 13 и 35 выделяются следующие напряжения:


где 

3ωпр3=ωГ2-ωЗ3 - утроенное значение третьей промежуточной частоты;
ωпр3=ωГ4-ωЗ3 - третья промежуточная частота;
φпр10=φГ2-φЗ3; φпр11=φГ4-φЗ3.
Однако только напряжение uпр11(t) попадает в полосу пропускания усилителя 35 третьей промежуточной частоты. Выходное напряжение коррелятора 36 также равно нулю. Ключ 38 не открывается и ложный сигнал (помеха) uз3(t), принимаемый по третьему зеркальному каналу на частоте ωЗ3, подавляется.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые по третьему комбинационному каналу ωk3 или четвертому комбинационному каналу ωk4 или по любому другому комбинационному каналу.Если ложные сигналы (помехи) одновременно принимаются по второму ωЗ2 и третьему ωЗ3 зеркальным каналам, то усилители 13 и 35 третьей промежуточной частоты выделяются напряжения


которые поступают на два входа коррелятора 36. На выходе последнего образуется напряжение, которое не достигает максимального значения и не превышает порогового напряжения в пороговом блоке 37. Ключ 38 не открывается и ложные сигналы (помехи), одновременно принимаемые по второму ωЗ2 и третьему ωЗ3 зеркальным каналам, подавляются. Это объясняется тем, что канальные напряжения uпр8(t) и uпр11(t) образованы разными ложными сигналами (помехами) uЗ2(t) и uЗ3(t), принимаемыми на разных частотах ωЗ2 и ωЗ3. Поэтому между ними существует слабая корреляционная связь и напряжение коррелятора 36 не достигает максимального значения и не превышает пороговый уровень Uпор в пороговом блоке 37. Кроме того, корреляционная функция R(τ) ложных сигналов (помех) не имеет ярко выраженного главного лепестка.
Аналогичным образом подавляются и ложные сигналы (помехи), принимаемые одновременно по другим дополнительным каналам.
Таким образом, предлагаемые способ и система по сравнению с базовыми объектами обеспечивают измерение не только радиальной скорости и дальности спутника навигационной системы ГЛОНАСС, но и его угловые координаты (азимута и угла места), т.е. местоположение спутника навигационной системы ГЛОНАСС относительно наземного пункта контроля. При этом первую приемопередающую и две приемные антенны размещают в виде геометрического прямого угла, в вершине которого помещают первую приемопередающую антенну, общую для первой и второй приемных антенн, размещенных в азимутальной и угломестной плоскостях соответственно. Причем для увеличения точности пеленгации спутника навигационной системы ГЛОНАСС увеличивают относительный размер измерительных баз d1/λ и d2/λ, а возникающую при этом неоднозначность устраняют корреляционной обработкой сигналов» принимаемых указанными антеннами. Расположение приемных антенн в виде геометрического прямого угла является новым принципом фазовой пеленгации источников радиоизлучений, который имеет ряд преимуществ перед существующим методом фазовой пеленгации.
Использование дополнительных гетеродинов, частоты которых выбраны определенным образом, увеличивают количество дополнительных каналов приема, но одновременно создают благоприятные условия для их подавления за счет корреляционной обработки канальных напряжений.
Использование корреляторов с регулируемой временной задержкой обеспечивает не только измерение радиальной скорости и местоположения спутника навигационной системы ГЛОНАСС, но и его сопровождение при движении относительно наземного пункта контроля.
Использование дуплексного метода радиосвязи с применением двух частот и сложных ФМн-сигналов обеспечивает развязку по частоте и повышение помехоустойчивости канала радиосвязи. Основное достоинство используемого дуплексного метода измерения состоит в том, что в нем исключается влияние атмосферы при прохождении радиосигнала. Поэтому точность измерения в основном зависит от параметров бортового ретранслятора, типа используемого запросного сигнала и временных задержек его в аппаратуре передачи и приема.
Сложные ФМн-сигналы обладают высокой помехоустойчивостью, энергетической и структурной скрытностью. Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность.
Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Сложные ФМн-сигналы позволяют применять новый вид селекции -структурную селекцию. Это значит, что появляется возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
Тем самым функциональные возможности известных технических решений расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2013 |
|
RU2529867C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2535653C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| МОДЕМ СИГНАЛОВ ПЕРЕДАЧИ ВРЕМЕНИ ПО ДУПЛЕКСНОМУ КАНАЛУ СПУТНИКОВОЙ СВЯЗИ | 2016 |
|
RU2623718C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2509373C2 |
| Система дистанционного контроля и управления солнечным концентраторным модулем | 2019 |
|
RU2718687C1 |




Изобретение относится к области радиотехники, а именно к области навигационных измерений, и может быть использовано в наземном комплексе управления орбитальной группировкой навигационных космических аппаратов (НКА). Технический результат заключается в расширении функциональных возможностей и повышении помехоустойчивости, надежности дуплексной радиосвязи между наземным пунктом контроля и спутником навигационной системы ГЛОНАСС и точности измерения радиальной скорости и местоположения указанного спутника. Для этого наземный пункт контроля содержит задающий генератор 1, регистр 2 сдвига, фазовый манипулятор 3, гетеродины 4, 11 и 33, смесители 5, 12, 17, 34, 43 и 44, усилитель 6 первой промежуточной частоты, усилители 7, 10, 41 и 42 мощности, дуплексер 8, приёмопередающую антенну 9, усилители 13, 35, 45 и 46 третьей промежуточной частоты, удвоитель 14 фазы, делитель 15 фазы на два, узкополосные фильтры 16 и 18, измеритель 19 частоты Доплера, корреляторы 20, 36, 47 и 48, перемножители 21, 49 и 50, фильтры 22, 51 и 52 нижних частот, экстремальные регуляторы 23, 53 и 54, блоки 24, 55 и 56 регулируемой задержки, индикатор 26 дальности, ключ 38, приемные антенны 39 и 40, а спутник содержит приемопередающую антенну 26, дуплексер 27, усилители 28 и 32 мощности, гетеродины 29 и 59, смесители 30 и 60, усилитель 31 второй промежуточной частоты, усилитель 61 третьей промежуточной частоты, коррелятор 62, пороговый блок 63 и ключ 64. 2 н.п. ф-лы, 6 ил.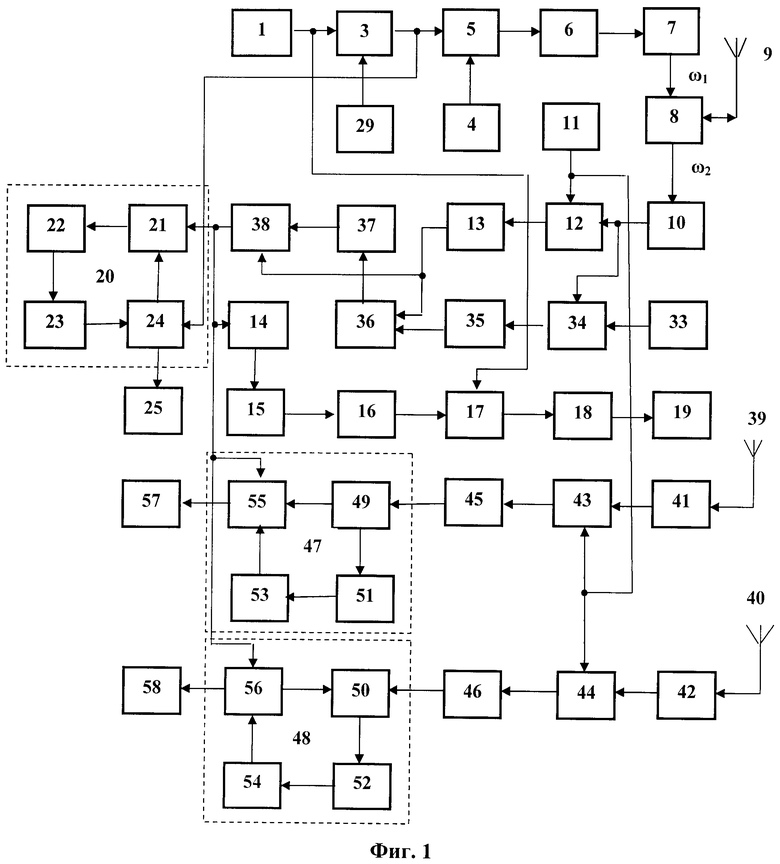
1. Запросный способ измерения радиальной скорости и местоположения спутника навигационной системы ГЛОНАСС, заключающийся в использовании двух объектов, при этом на первом объекте запросный сигнал на частоте ωс манипулируют по фазе на 180° псевдослучайной последующей максимальной длительности, формируют тем самым сложный сигнал с фазовой манипуляцией, преобразуют его по частоте с использованием частоты ωГ1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωc+ωГ1=ω1, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1, улавливают ретранслятором второго объекта, усиливают по мощности, преобразуют по частоте с использованием частоты ωГ3 третьего гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωГ1=ω2, усиливают по мощности, излучают в эфир на частоте ω2=ωпр2, улавливают блоком запроса первого объекта, усиливают по мощности, преобразуют его по частоте с использованием частоты ωГ2 второго гетеродина, выделяют первое напряжение третьей промежуточной частоты
ωпр3±'ΩД=ωГ2-ω2, умножают и делят его по фазе на два, выделяют гармоническое колебание на частоте ωпр3±'ΩД, сравнивают его по частоте с запросным сигналом на частоте ωс, выделяют доплеровскую частоту ±'ΩД и по величине и знаку доплеровской частоты определяют величину и направление радиальной скорости, одновременно сложный сигнал с фазовой манипуляцией на частоте ωс пропускают через первый блок регулируемой задержки, перемножают его с первым напряжением третьей промежуточной частоты, выделяют низкочастотное напряжение, формируя тем самым первую корреляционную функцию R1(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают первую корреляционную функцию R1(τ) на максимальном уровне, фиксируют временную задержку τЗ между запросным и ретранслированным сигналом и по ее значению определяют расстояние между объектами, отличающийся тем, что в качестве первого объекта используют наземный пункт контроля, а в качестве второго объекта используют спутник навигационной системы ГЛОНАСС, при этом на наземном пункте контроля принимаемый на частоте ω2=ωпр2 и усиленный по мощности сигнал преобразуют по частоте с использованием частоты ωГ4 четвертого гетеродина, выделяют второе напряжение третьей промежуточной частоты ωпр3±'ΩД=ω2-ωГ4, перемножают его с первым напряжением третьей промежуточной частоты, выделяют низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ), сравнивают его с первым напряжением Uпор и в случае его превышения разрешают дальнейшую обработку принимаемого сигнала улавливающим сигналом на частоте ω2=ωпр2 на две приемные антенны, усиливают его по мощности, преобразуют по частоте с использованием частоты ωГ2 второго гетеродина, выделяют третье и четвертое напряжения третьей промежуточной частоты ωпр3=ωГ2-ω2 соответственно, перемножают их с первым напряжением третьей промежуточной частоты, пропущенным через второй и третий блоки регулируемой задержки, выделяют низкочастотные напряжения, формируя тем самым третью R3(τ) и четвертую R4(τ) корреляционные функции, изменением временной задержки поддерживают третью R3(τ) и четвертую R4(τ) корреляционные функции на максимальном уровне, фиксируют время задержки τЗ2 и τЗ3 между ретранслированными сигналами и по их значениям определяют азимут и угол места спутника навигационной системы ГЛОНАСС, причем частоты ωГ2 и ωГ4 второго и четвертого гетеродинов разносят на удвоенное значение третьей промежуточной частоты ωГ2-ωГ4=2ωпр3 и выбирают симметричными относительно частоты ω2 принимаемого сигнала ω2-ωГ4=ωГ2-ω2=ωпр3, первую приемопередающую и две приемные антенны размещают в виде геометрического прямого угла, в вершине которого помещают первую приемопередающую антенну, общую для приемных антенн, размещенных в азимутальной и угломестной плоскостях соответственно, на спутнике навигационной системы ГЛОНАСС принимаемый на частоте ω1=ωпр1 и усиленный по мощности сигнал преобразуют по частоте с использованием частоты ωГ5 пятого гетеродина, выделяют пятое напряжение третьей промежуточной частоты ωпр3=ωГ5-ω1, перемножают его с напряжением второй промежуточной частоты, выделяют низкочастотное напряжение, пропорциональное пятой корреляционной функции R5(τ), сравнивают его с пороговым напряжением Uпор и в случае его превышения разрешают дальнейшую обработку принимаемого сигнала, причем частоты ωГ3 и ωГ5 третьего и пятого гетеродинов разносят на частоту ω1 принимаемого сигнала ωГ5-ωГ3=ω1.
2. Система для измерения радиальной скорости и местоположения спутника навигационной системы ГЛОНАСС, содержащая два объекта, при этом первый объект содержит последовательно включенные задающий генератор, фазовый манипулятор, второй вход которого соединен с выходом регистра сдвига, первый усилитель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, первый дуплексер, вход-выход которого связан с первой приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, и первый усилитель третьей промежуточной частоты, последовательно включенные удвоитель фазы, делитель фазы на два, первый узкополосный фильтр, четвертый смеситель, второй вход которого соединен с выходом задающего генератора, второй узкополосный фильтр и измеритель частоты Доплера, последовательно подключенные к выходу фазового манипулятора первый блок регулируемой задержки, первый перемножитель, первый фильтр нижних частот и первый экстремальный регулятор, выход которого соединен с вторым входом первого блока регулируемой задержки, к второму выходу которого подключен индикатор дальности, второй объект содержит последовательно включенные третий гетеродин, третий смеситель и усилитель второй промежуточной частоты, последовательно включенные четвертый усилитель мощности, второй дуплексер, вход-выход которого связан со второй приемопередающей антенной, и третий усилитель мощности, выход которого соединен с вторым входом третьего смесителя, отличающаяся тем, что она снабжена четвертым и пятым гетеродинами, пятым, шестым, седьмым и восьмым смесителями, вторым, третьим, четвертым и пятым усилителями третьей промежуточной частоты, вторым, третьим, четвертым и пятым корреляторами, двумя пороговыми блоками, двумя ключами, вторым и третьим перемножителями, вторым и третьим фильтрами нижних частот, вторым и третьим экстремальными регуляторами, двумя приемными антеннами, пятым и шестым усилителями мощности, указателем азимута, указателем угла места, причем к выходу второго усилителя мощности последовательно подключены пятый смеситель, второй вход которого соединен с выходом четвертого гетеродина, второй усилитель третьей промежуточной частоты, второй коррелятор, второй вход которого соединен с выходом первого усилителя третьей промежуточной частоты, первый пороговый блок и первый ключ, второй вход которого соединен с выходом первого усилителя третьей промежуточной частоты, а выход подключен к входу удвоителя фазы и к второму входу первого перемножителя, к выходу первой приемной антенны последовательно подключены пятый усилитель мощности, шестой смеситель, второй вход которого соединен с выходом второго гетеродина, третий усилитель третьей промежуточной частоты, второй перемножитель, второй вход которого через второй блок регулируемой задержки соединен с выходом первого ключа, второй фильтр нижних частот и второй экстремальный регулятор, выход которого соединен с вторым входом второго блока регулируемой задержки, к второму выходу которого подключен указатель азимута, к выходу второй приемной антенны последовательно подключены шестой усилитель мощности, седьмой смеситель, второй вход которого соединен с выходом второго гетеродина, четвертый усилитель третьей промежуточной частоты, третий перемножитель, второй вход которого через третий блок регулируемой задержки соединен с выходом первого ключа, третий фильтр нижних частот и третий экстремальный регулятор, выход которого соединен со вторым входом третьего блока регулируемой задержки, к второму выходу которого подключен указатель угла места, к выходу третьего усилителя мощности последовательно подключен восьмой смеситель, второй вход которого соединен с выходом пятого гетеродина, пятый усилитель третьей промежуточной частоты, пятый коррелятор, второй вход которого соединен с выходом усилителя второй промежуточной частоты, второй пороговый блок и второй ключ, второй вход которого соединен с выходом усилителя второй промежуточной частоты, а выход подключен к входу четвертого усилителя мощности, в качестве первого объекта использован наземный пункт контроля, а в качестве второго объекта использован спутник навигационной системы ГЛОНАСС, первая приемопередающая антенна, первая и вторая приемные антенны размещены в виде геометрического прямого угла, в вершине которого помещена первая приемопередающая антенна, общая для первой и второй приемных антенн, размещенных в азимутальной и угломестной плоскостях соответственно.
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ | 2009 |
|
RU2429503C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ДАЛЬНОСТИ И ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ НАВИГИРУЮЩИМСЯ ОБЪЕКТОМ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152048C1 |
| Ручное устройство для высева семян | 1934 |
|
SU40642A1 |
| US 7567208 B2, 28.07.2009 | |||

