Это раскрытие относится к медицинским устройствам и, в частности, к медицинским устройствам, использующим волоконно-оптическую технологию для проведения многопараметрических измерений и контроля.
Интервенционные инструменты обычно измеряют только один физический параметр. Примеры включают в себя провода давления/потока для контроля гемодинамики в местоположении наконечника, электроды кардиального картирования для измерений напряжения в отдельных местоположениях электродов и абляционные катетеры, которые позволяют проводить измерения температуры ткани и полного сопротивления на наконечнике. Пространственное отслеживание путем измерения полного сопротивления или электромагнитного (EM) зондирования может быть встроено в эти устройства для облегчения навигации; однако отслеживающие измерения, как правило, локализованы в области наконечника, и они чувствительны к неоднородностям среды или временным вариациям лежащего в основе полного сопротивления/EM характеристик. Кроме того, отслеживающие катушки могут быть трудно миниатюризировать в пределах субмиллиметрового диапазона, сохраняя при этом отношение сигнал-шум и другие технические характеристики. Компромиссы между размером катушки и производительностью ограничивают общие габариты инструмента и размер рабочего канала или просвета в инструменте. Кроме того, во время электрофизиологических (EP) процедур под магнитно-резонансным (MR) контролем отдельная точка на катетере может быть локализована посредством громоздкой катушки и кабеля преобразователя. Катушка и кабель, как правило, имеют размеры, которые препятствуют их использованию для отслеживания множества точек вдоль корпуса катетера. Кроме того, радиочастотные (RF) помехи от генератора во время абляции препятствуют возможности точно отслеживать катушку с использованием MR.
В соответствии с настоящими принципами используется основанное на оптоволокне зондирование. Инструменты в соответствии с настоящими принципами обеспечивают невосприимчивость к электромагнитным помехам и отсутствие электромагнитных излучений. Используются оптические датчики, которые пассивны и поэтому конструктивно безопасны. Оптические датчики в массиве имеют возможность быть мультиплексированными. Кроме того, обеспечена возможность многопараметрического зондирования (деформации, температуры, давления и т.д.), так же как возможность распределенного зондирования при использовании оптики. Датчики обладают высокой чувствительностью (вплоть до нанодеформаций при использовании интерферометрии при оптическом опросе) и нечувствительны к вариации амплитуды сигнала (например, когда используются волоконные брегговские датчики при обнаружении длины волны). Волокна малы и обладают небольшим весом, и они идеальны для минимально-инвазивных применений.
Для многих медицинских применений, в особенности для тех, которые требуют минимально-инвазивной навигации и инструментария, волоконно-оптическое зондирование (формы и других соответствующих биомедицинских параметров) предлагает привлекательность высокоточной и с малой погрешностью локализации/зондирования физиологических параметров при высоком пространственном разрешении вдоль длины волокна и с высоким временным разрешением. Учитывая небольшой вес, удлиненный форм-фактор оптоволокна и компактные поперечные габариты, оптоволоконная технология может использоваться в клинических применениях, нуждающихся в точном пространственно-временном отслеживании непрерывного и удлиненного медицинского устройства/инструмента, которое может быть введено в тело через кожу или через естественные отверстия.
Кроме того, обеспечены интервенционные процедуры, которые используют проволочные направители, катетеры, гибкие эндоскопы (или другие подобные удлиненные инструменты), в которых существует необходимость в компактном и надежном многоточечном/распределенном зондировании характеристик и параметров физиологического движения, в том числе температуры, давления и изменений напряжения. Оптоволоконные решетки Брэгга (FBG) могут быть встроены прямо в корпус удлиненного инструмента, такого как проволочный направитель или катетер, без существенного изменения механических свойств инструмента или форм-фактора/габаритов. Кроме того, возможны быстрые многоточечные и многопараметрические измерения сегментарного движения, напряжения, температуры и давления путем введения покрытий или кристаллических материалов (например, кристаллов Bi12TiO20 для считывания напряжения, металлических сплавов Ni-Mn-Ga с эффектом запоминания формы для магнитного зондирования, осаждения из паровой фазы металла Zn для улучшенного зондирования температуры и т.д.).
Встраивание волоконных решеток Брэгга с покрытием в проволочные направители, катетеры или другие гибкие удлиненные инструменты преодолевает ограничения предшествующего уровня техники путем обеспечения возможности быстрых многопараметрических измерений вдоль инструмента. Измерения напряжения, магнитного поля, температуры (гемодинамический поток может быть получен из изменений температуры) и давления возможны при введении покрытий или кристаллических материалов (например, кристаллов Bi12TiO20 для считывания напряжения, металлических сплавов Ni-Mn-Ga с эффектом запоминания формы для магнитного зондирования, осаждения из паровой фазы металла Zn для улучшенного зондирования температуры и т.д.). Эти инструменты позволяют проводить отслеживание сегментарных движений распределенным образом вдоль длины инструмента. Разные сегменты находятся под влиянием разных главным образом физиологических движений, например дыхательного против кардиального, и поэтому становится возможной двигательно-специфическая компенсация или синхронизация инструментальных данных (без необходимости в дополнительных катетерах/устройствах, например отслеживающего коронарный синус катетера, отдельного от основного EP катетера, для получения дыхательной компенсации или синхронизации рентгеновской флуороскопии).
Встраивание волоконных решеток Брэгга с покрытием в проволочные направители, катетеры или другие гибкие удлиненные инструменты преодолевает ограничения предшествующего уровня техники путем обеспечения возможности быстрых многопараметрических измерений вдоль инструмента. Одновременные измерения могут быть выполнены для движения, напряжения, температуры, давления и т.д. распределенным образом на "эффекторе" или другом сегменте инструмента (например, на дистальном 10 см сегменте, включающем в себя наконечник петлевого/лассообразного катетера для картирования, используемого в электрофизиологических процедурах) с использованием одного (или множества) зондирующего волокна (волокон) и оптической системы опроса (в противоположность множеству отдельных датчиков, проводке и значительно большим габаритам, которые необходимы для достижения этого с помощью традиционной электроники).
Механическая деформация сегмента "эффектора" инструмента может отслеживаться для наблюдения изменений в биологической ткани в ответ на вмешательство, например, измерение индуцированных тканью деформаций FBG в электрофизиологическом петлевом катетере для оценки электромеханической реакции или оценки интервенционного воздействия на сердечную сократимость.
Рефлектометрия оптического диапазона частот (OFDR) может использоваться для снятия показаний с тысяч датчиков с одинаковой номинальной длиной отраженных волн с высоким пространственным и временным разрешением. OFDR использует лазер с непрерывной подстройкой частоты для опроса ряда FBG вдоль оптоволокна. Отраженный свет от этих элементов обнаруживается интерферометрическим образом для оценки сдвига длины волны, связанного с деформацией в волоконных брегговских элементах. Деформации от множества FBG могут быть измерены, а соответствующая волоконная форма может быть реконструирована по нескольким оптическим сердцевинам, работающим параллельно.
Интервенционный инструмент, система и способ включают в себя удлиненный гибкий элемент, имеющий одну или более сегментированных секций, расположенных продольно. Оптоволокно расположено внутри гибкого элемента. Множество оптических датчиков соединено с оптоволокном и распределено вдоль длины гибкого элемента так, чтобы оптические датчики были расположены для наблюдения отдельных параметров одновременно вдоль гибкого элемента для обеспечения распределенного зондирования.
Система для интервенционной процедуры включает в себя интервенционный инструмент, включающий в себя удлиненный гибкий элемент, имеющий одну или более сегментированных секций, расположенных продольно. По меньшей мере одно оптоволокно расположено внутри гибкого элемента, и множество оптических датчиков соединено по меньшей мере с одним оптоволокном и распределено вдоль длины гибкого элемента так, чтобы оптические датчики были расположены для наблюдения параметров одновременно по меньшей мере в одном из разных положений и для разных источников данных, чтобы обеспечить распределенное зондирование. Рабочая станция конфигурируется для обеспечения интерфейса для управления интервенционным инструментом и выполнения процедуры с использованием интервенционного инструмента.
Медицинский интервенционный способ включает в себя обеспечение интервенционного инструмента, включающего в себя удлиненный гибкий элемент, имеющий одну или более секций, расположенных продольно, по меньшей мере одно оптоволокно, расположенное внутри гибкого элемента, и множестве оптических датчиков, соединенных по меньшей мере с одним оптоволокном и распределенных вдоль длины гибкого элемента так, чтобы оптические датчики были расположены для наблюдения параметров одновременно в по меньшей мере одном из разных положений и для разных параметров источников данных вдоль гибкого элемента, чтобы обеспечить распределенное зондирование. Интервенционный инструмент направляется в тело для выполнения медицинской процедуры.
Эти и другие задачи, особенности и преимущества настоящего раскрытия станут очевидны из следующего подробного описания иллюстративных вариантов воплощения этого изобретения, которое необходимо читать совместно с прилагаемыми чертежами.
Это раскрытие подробно представит следующее описание предпочтительных вариантов воплощения со ссылкой на следующие фигуры, на которых:
фиг.1 является блок-схемой, показывающей иллюстративную систему для выполнения интервенционной процедуры в соответствии с настоящими принципами;
фиг.2 является блок-схемой, показывающей интервенционный инструмент, имеющий зондирующее оптоволокно и измеряющее параметры волокно в соответствии с настоящими принципами;
фиг.3 является блок-схемой, показывающей интервенционный инструмент, имеющий зондирующее оптоволокно и измеряющее параметры волокно с окнами, открытыми во внешнюю среду, в соответствии с настоящими принципами;
фиг.4A является схемой, показывающей волоконные датчики, расположенные в ряд для измерения параметра в одном и том же местоположении в соответствии с настоящими принципами;
фиг.4B является схемой, показывающей волоконные датчики, расположенные в шахматном порядке для измерения нескольких параметров в одном и том же местоположении в соответствии с настоящими правилами;
фиг.5 является схемой, показывающей стабилизирующее устройство, используемое с оптическими датчиками в соответствии с одним иллюстративным применением; и
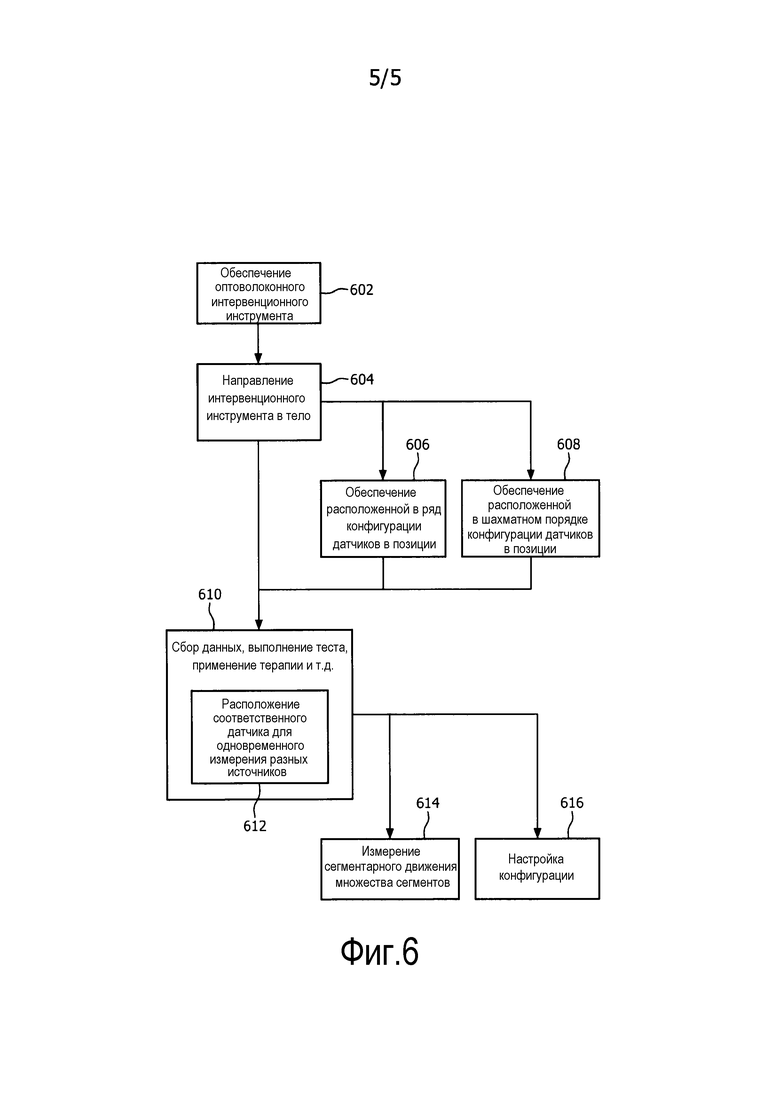
фиг.6 является блок-схемой последовательности операций, показывающей иллюстративную интервенционную процедуру в соответствии с настоящими принципами.
Во многих интервенционных процедурах, использующих проволочные направители или катетеры, существует необходимость в компактном и надежном многоточечном или распределенном зондировании характеристик и параметров физиологического движения, в том числе температуры, давления, изменений напряжения и т.д. В соответствии с настоящими принципами, оптоволоконные решетки Брэгга (FBG) могут быть встроены прямо в корпус удлиненного инструмента, такого как проволочный направитель или катетер, без существенного изменения механических свойств инструмента, форм-фактора или габаритов. Кроме того, быстрые многоточечные и многопараметрические измерения сегментарного движения, напряжения, температуры и давления возможны путем введения покрытий или кристаллических материалов (например, кристаллов Bi12TiO20 для считывания напряжения, металлических сплавов Ni-Mn-Ga с эффектом запоминания формы для магнитного зондирования, осаждения из паровой фазы металла Zn для улучшенного зондирования температуры и т.д.).
Описано FBG функционализированное медицинское устройство, такое как проволочный направитель, катетер или другой гибкий удлиненный инструмент, которое выполняет одновременные измерения движения, напряжения, температуры, давления или других параметров распределенным образом, например на сегменте "эффектора" или другом сегменте инструмента, например дистальном 10 см сегменте, включающем в себя наконечник петлевого/лассообразного катетера для картирования, используемого в электрофизиологических процедурах. Отслеживание сегментарного движения может быть выполнено вдоль инструмента, и поэтому двигательная компенсация/синхронизация инструментальных данных визуализации или измерения напряжения/температуры/давления может быть сделана более точной. Отслеживание деформации сегмента "эффектора" инструмента может использоваться для измерения изменения в биологической реакции ткани на вмешательство, например, контролируя индуцированные тканью деформации FBG в петлевом катетере для оценки электромеханической синхронности или оценки интервенционного воздействия на сердечную сократимость.
Следует понимать, что настоящее изобретение описано с точки зрения медицинских инструментов, однако идеи настоящего изобретения гораздо шире и применимы к любым инструментам, используемым для отслеживания или анализа сложных биологических или механических систем. Следует также понимать, что иллюстративный пример оптического устройства может также включать в себя электронные компоненты в зависимости от применения. Элементы, изображенные на фигурах, могут быть реализованы в различных комбинациях аппаратных средств и обеспечивать функции, которые могут быть объединены в одном элементе или множестве элементов.
Функции различных элементов, показанных на фигурах, могут быть обеспечены с помощью использования специальных аппаратных средств, а также аппаратных средств, способных исполнять программное обеспечение в сочетании с соответствующим программным обеспечением. Если они обеспечены процессором, то функции могут быть обеспечены одним специальным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина "процессор" или "контроллер" не должно толковаться как относящееся исключительно к аппаратным средствам, способным к исполнению программного обеспечения, и может неявно включать в себя, без ограничения, аппаратные средства цифрового сигнального процессора ("DSP"), постоянное запоминающее устройство ("ROM") для хранения программного обеспечения, оперативную память ("RAM") и энергонезависимое запоминающее устройство.
Кроме того, все утверждения в настоящем документе, описывающие принципы, аспекты и варианты воплощения изобретения, а также его конкретные примеры, предназначены для того, чтобы охватить его структурные и функциональные эквиваленты. Кроме того, предполагается, что такие эквиваленты включают в себя оба в настоящий момент известных эквивалента, а также эквиваленты, которые могут быть разработаны в будущем (то есть любые разработанные элементы, которые выполняют ту же самую функцию, независимо от структуры).
Так, например, специалистам в области техники следует иметь в виду, что блок-схемы, представленные в настоящем документе, представляют собой концептуальный вид иллюстративных системных компонентов и/или электрической схемы, воплощающей принципы изобретения. Аналогично следует иметь в виду, что любые блок-схемы, блок-схемы последовательности операций, диаграммы изменения состояний, псевдокод и т.п. представляют различные процессы, которые могут быть в значительной степени представлены в машиночитаемых носителях данных и, таким образом, исполняться компьютером или процессором независимо от того, показан ли такой компьютер или процессор явным образом.
Кроме того, варианты воплощения настоящего изобретения могут принимать форму компьютерного программного продукта, доступного с носителя пригодного для использования компьютером или машиночитаемого носителя, обеспечивающего код программы для использования применительно к или непосредственно компьютером или любой системой исполнения инструкций. Для целей этого описания пригодным для использования компьютером или машиночитаемым носителем может быть любое устройство, которое может включать в себя, сохранять, осуществлять связь, передавать или осуществлять транспортировку программы для использования применительно к и непосредственно системой исполнения инструкций, устройством или прибором. Среда может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или устройством или прибором) или средой распространения. Примеры машиночитаемого носителя включают в себя полупроводниковую память или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативную память (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. Текущие примеры оптических дисков включают в себя компакт-диск, предназначенный только для чтения (CD-ROM), компакт-диск, предназначенный для чтения и записи (CD-R/W) и DVD.
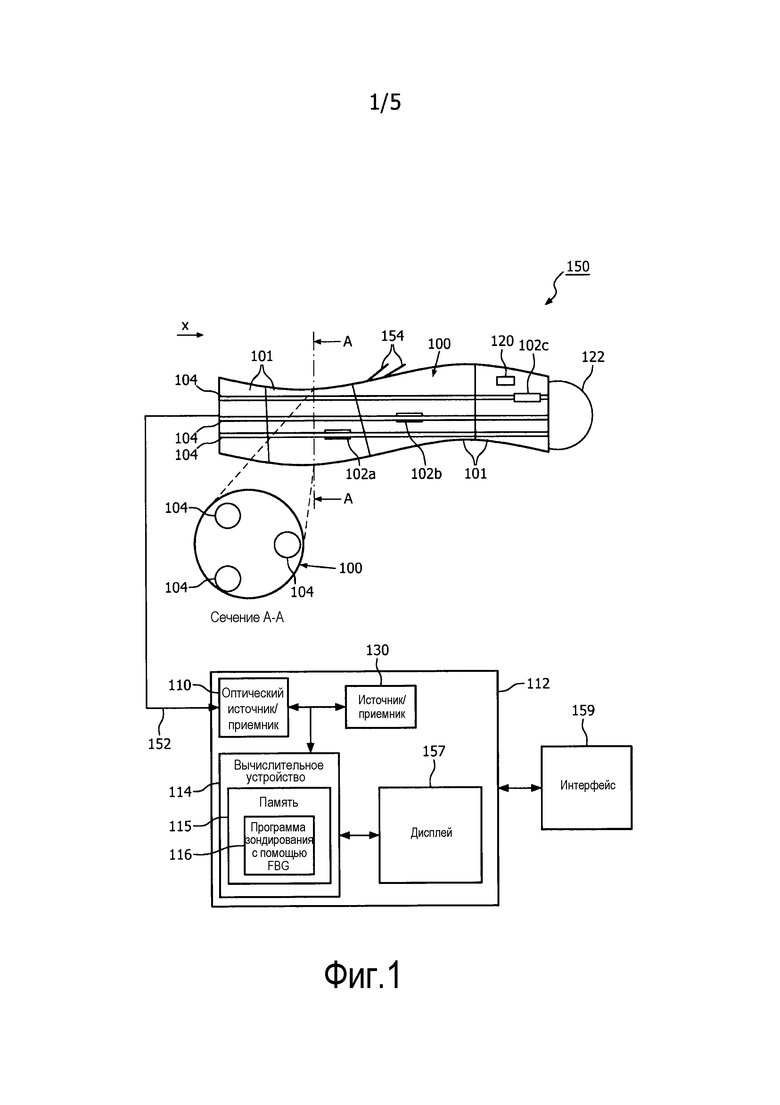
На чертежах, на которых одинаковые номера обозначают одни и те же или подобные элементы, и первоначально на фиг.1 иллюстративно показано оптически функционализированное медицинское устройство 100 в соответствии с одним вариантом воплощения. Устройство 100 может включать в себя проволочный направитель, катетер или другой гибкий удлиненный инструмент, который позволяет любые или все из одновременных измерений, отслеживание сегментарного движения и/или отслеживание деформации.
Одновременные измерения могут выполняться с помощью устройства 100 для измерения движения, напряжения, температуры, давления, цвета, деформации, магнетизма, положения, биохимического состояния и т.д. распределенным образом. Например, множество измерений могут выполняться на эффекторном сегменте или любом сегменте 101 инструмента. Эффекторный сегмент может включать в себя сегмент дистального конца, включающего в себя наконечник петлевого/лассообразного катетера для картирования, используемого в электрофизиологических процедурах, и, в частности, 10 см сегмент дистального конца. Устройство 100 также способно к отслеживанию сегментарного движения вдоль самого инструмента. Поэтому полученная с помощью FBG компенсация и поправка инструментальных данных визуализации или измерений напряжения/температуры/давления может быть выполнена на одном или более сегментах 101. Устройство 100 может также отслеживать деформацию эффекторного сегмента инструмента для измерения изменений в биологической ткани в ответ на интервенционную процедуру, например, контролируя индуцированные тканью деформации FBG в петлевом катетере для оценки электромеханической синхронности или оценки интервенционного воздействия на сердечную сократимость. Таким образом, отклонение, испытываемое устройством 100, может быть сопоставлено с деформациями ткани, окружающей устройство 100.
Устройство 100 включает в себя датчики деформации или другие датчики 102, которые расположены на удлиненной секции устройства 100. Один датчик 102 может быть обеспечен в каждом из трех волокон 104 для формирования триплета датчиков в данном сечении или аксиальном местоположении (направлении по оси Х) в этом варианте воплощения. Также может использоваться другое число волокон. Устройство 100 является предпочтительно удлиненным медицинским инструментом для диагностики, вмешательства или мониторинга терапии и может принимать форму катетера, проволочного направителя, эндоскопа и т.д. (с ручным или автоматическим управлением для навигации устройства). Волокна 104 вводятся в корпус инструмента 100 с рядом волоконных решеток Брэгга или других датчиков 102, пространственно распределенных вдоль его длины и/или сгруппированных в функциональных областях инструмента, например, дистальном сегменте, включающем в себя наконечник. Датчики 102 могут формировать массив для сбора данных в области. Каждое волокно 104 может включать в себя один или более датчиков 102.
Датчики 102 могут включать в себя FBG без покрытия для зондирования формы, FBG со встроенными материалами для зондирования температуры (например, осаждения из паровой фазы металла Zn), FBG со встроенными материалами для считывания напряжения/магнитного поля (например, Bi12TiO20, Ni-Mn-Ga) и/или другие FBG со встроенными материалами с чувствительностью к другим представляющим интерес биофизическим параметрам (например, зондирование показателя степени кислотности среды (pH), содержания углекислого газа (pCO2) и т.д.). Могут также использоваться другие оптические или электронные датчики.
Устройство 100 может включать в себя оптический модуль 110 для освещения зондировочного волокна и приема сигналов волокна. Источник модуля 110 может быть на ближайшем концевом участке устройства и переносить свет, используя волновод, или на дистальном концевом участке для прямого освещения. Модуль 110 включает в себя функцию приемника.
Устройство 100 может быть реализовано как часть системы 150 компонентов. Оптическая консоль 112 опроса может использоваться для снятия показаний мультиплексированных сигналов, возвращающихся из решеток FBG во всех волокнах. Вычислительное устройство 114 может включать в себя программу 116 зондирования FBG в режиме реального времени для зондирования формы волокна, картирования термочувствительных сдвигов длины волны FBG в изменения температуры, картирования чувствительных к напряжению/магнитному полю сдвигов длины волны FBG в напряжение/характеристики магнитного поля и/или картирования других специализированных сдвигов длины волны FBG в соответствующие измерения биофизических параметров. Консоль 112 конфигурируется для взаимодействия в режиме реального времени и визуального представления местоположения инструмента и пространственно распределенных измерений (например, полученных с помощью FBG биофизических измерений, видео от эндоскопа или других данных визуализации, видео от катетера или других данных визуализации).
Устройство 100 может по желанию включать в себя недорогие традиционные датчики 120, например электроды для считывания напряжения, или может включать в себя механизм 122 стабилизации/фиксации для удержания точки на зондирующем волокне, фиксированной по отношению к опорному местоположению, представляющему интерес (например, надувной баллон с или без отверстий для обеспечения обтекания точки фиксации).
Система 150 может по желанию включать в себя систему 130 диагностической визуализации для обеспечения более глобальной визуализации интересующей анатомии и интервенционной области сканирования (например, рентгеновская CV система для кардиальных процедур или ультразвуковая система для вмешательства в тело и т.д.). Инструмент 100 может использоваться в сочетании с данными визуализации, полученными или до процедуры, или во время процедуры, или одновременно с оптическим опросом. Визуализация и записи оптических данных могут использоваться в комбинации для улучшения оценок биофизических параметров, характеристик инструментов и свойств ткани для принятия решений относительно руководства интервенционной процедурой и контроля прогресса терапии.
Система 150 включает в себя информационное соединение 152 к/от вывода датчика (или опросного вывода FBG) от датчиков 102a-c, обеспечивающих считывание формы волокна/дополнительных биофизических параметров. Полученные инструментальные данные могут передаваться через соединение 152, например, видео в режиме реального времени (например, от видео-эндоскопа), ультразвук в режиме реального времени (например, от внутрисердечного эхо, катетера внутрисердечной эхокардиографии (ICE)). Механизм 154 инструментальной терапии подает, например, радиочастотную (RF) энергию для радиочастотного (RF) абляционного катетера, ультразвуковую (US) энергию для инструмента высокоинтенсивного фокусированного ультразвука (HIFU) и т.д. Информационное соединение 152 между инструментом 100 с поддержкой FBG также предоставляет информацию в/от системы 130 диагностической визуализации. Через соединение 152 можно обмениваться сигналами обратной связи и управления. Например, навигация инструмента может использоваться в качестве обратной связи на основании опроса FBG для помощи в направлении инструмента 100. Кроме того, сигналы обратной связи или управляющие сигналы могут использоваться для доставки инструментальной терапии, основанной на опросе FBG.
Система 150 может включать в себя множество обрабатывающих или вычислительных устройств 114 для генерирования управляющих сигналов, выполнения вычислений, генерирования видеоизображений, интерпретации обратной связи и т.д. Например, обработка распределенных FBG измерений формы позволяет осуществлять зависящую от сегмента дыхательную, кардиальную или зависящую от общего движения пациента синхронизацию, коррекцию инструментов, системных данных диагностической визуализации и т.д. В особенно полезных вариантах воплощения в одном сегменте 101 зондирующего волокна в датчике 102c может доминировать кардиальное движение, в еще одном сегменте 101 в датчике 102b может доминировать дыхательное движение, тогда как третий сегмент 101 отражает общее движение пациента в датчике 102a. Множество волокон (или даже одно волокно) позволяет осуществлять обратную связь со всеми тремя сегментами. Пользователь, например хирург или техник, может выбрать заданные сегменты, из которых извлекаются стробирующие сигналы, посредством графического взаимодействия на инструментальной консоли 112 системы 150. Сигналы из этих частей могут затем использоваться для синхронизации или коррекции движения фактических представляющих интерес измерений для получения видео с компенсацией движения из видеоэндоскопа, или ультразвука с компенсацией движения от катетера ICE, или флуороскопии с компенсацией движения от системы рентгенографии и т.д. Кроме того, обработка измерений формы FBG может выполняться процессором 114 для отслеживания деформации сегмента "эффектора" инструмента 100 и таким образом контролировать изменение в результате вмешательства, например, контролируя индуцированные тканью деформации FBG в петлевом катетере для оценки электромеханической синхронности или оценки интервенционного воздействия на сердечную сократимость.
Пользователь может хранить данные в памяти 115. Память может включать в себя программы (например, программу 116). Программа 116 может быть приспособлена для снятия измерений и управления датчиками (например, решетками FBG). Дисплей 157 может быть обеспечен для визуализации процедур и/или для взаимодействия с консолью 112 и устройством 100 во время процедуры. Пользователь может использовать пользовательский интерфейс 159 для взаимодействия с консолью 112 и/или инструментом 100. Интерфейс 159 может включать в себя клавиатуру, мышь, систему с сенсорным экраном и т.д.
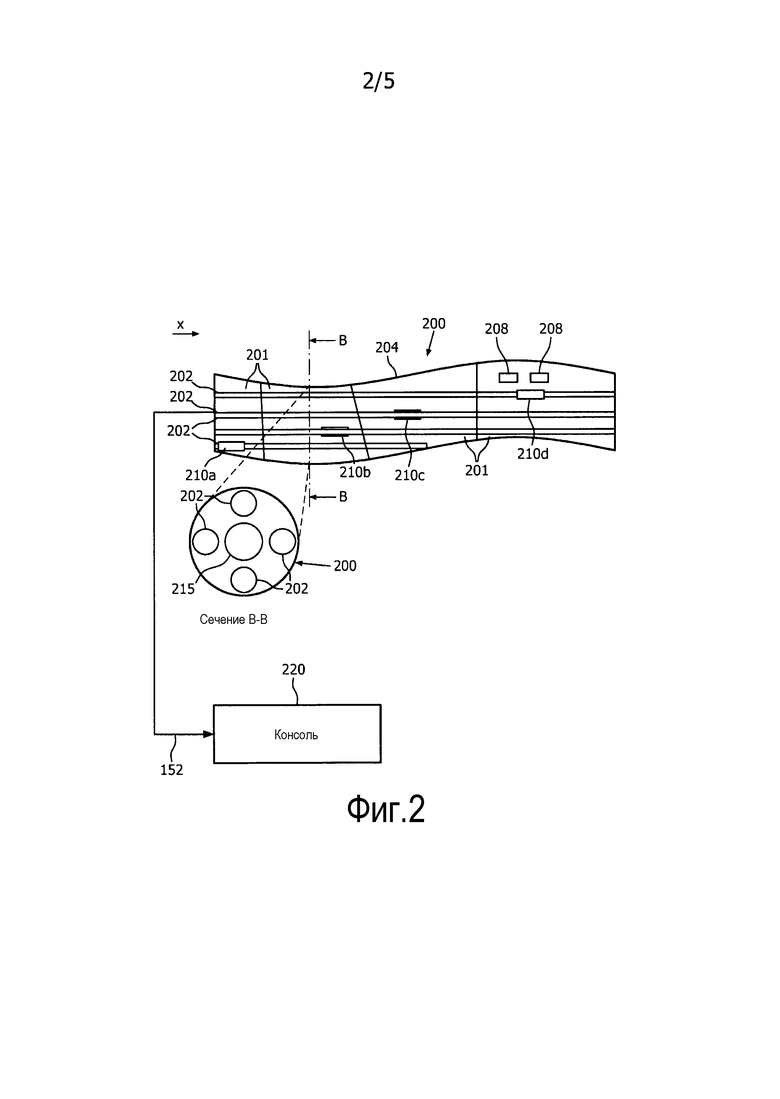
На фиг.2 иллюстративное интервенционное медицинское устройство 200 включает в себя зондирующее форму волокно (волокна) 202 в удлиненном медицинском инструменте 204 с посегментной коррекцией движения для отдельных сегментов 201 или устройства 200 в целом. В этом варианте воплощения удлиненный инструмент 204 может включать в себя недорогие датчики 208, такие как электроды для картирования напряжения, миниатюрные терморезисторы для зондирования температуры и т.д. Кроме того, зондирующие волокна 202 включают в себя распределение решеток FBG 210a-c, встроенных в корпус инструмента. Во время процедуры полученные с помощью FBG данные формы/движения визуализируются на графическом дисплее (157, фиг.1) с местоположением инструмента, показанным в виде точно совмещенного наложения поверх данных визуализации, полученных до процедуры, или данных визуализации, полученных во время процедуры, от системы диагностической визуализации, использующей информационное соединение совместно с инструментом с поддержкой FBG. Клинический врач получает возможность графически выбрать сегменты или подсегменты инструмента 200, чтобы использовать для отдельной синхронизации, например, с дыхательным движением (и/или компенсации) 210a, синхронизации с кардиальным движением (и/или компенсации) 210b, желудочно-кишечным (GI) движением (и/или компенсации) 210c и общим движением пациента (и/или компенсации) 210d. Положения и места датчиков могут быть заранее определены или регулироваться для обеспечения заданных пространственно измерений одновременно от разных источников информации.
Рабочая станция или консоль 220 снимает предписанные сигналы движения/стробирующие сигналы с каждого из сегментов или подсегментов, затем вычисляет и отображает в режиме реального времени с поправками на движение интересующие измерения, например, измерения напряжения от катетера для картирования EP с поправкой на синхронизацию/движение. Отслеживание положения, обеспеченное встроенным зондирующим волокном 202, позволяет осуществлять пространственное картирование и многомерную реконструкцию данных, полученных инструментом 200, например, реконструкцию видео/картирования изображения/поверхности в пространстве (3D), картирования напряжения/температуры в пространстве (3D) и т.д. Кроме того, измерения деформации измерительным волокном 202 могут комбинироваться с традиционными инструментальными измерениями (208) для контроля реакции на вмешательство. Например, гибкий петлевой катетер с поддержкой зондирования формы с традиционными электродами (208) и для измерения напряжения, и для доставки абляционной энергии может быть расположен в контакте с желудочковой стенкой во время абляции и измерения напряжения. Изменения в деформации петлевого сегмента, находящегося в контакте со стенкой, будут отражать изменения в синхронности и величине миокардиального движения, которое имеет клиническую значимость в оценке реакции.
Рабочая станция или консоль 220 могут также снимать сигналы положения/движения с каждого из сегментов или подсегментов для отображения в режиме реального времени сращенного наложения интервенционного устройства с поддержкой FBG с данными визуализации, полученными одновременно или до процедуры. Это дает возможность визуализации интервенционного устройства посредством зондирования положения при помощи FBG, которое особенно полезно для устройств получения изображения, которые не позволяют непосредственную визуализацию самого устройства. Например, стандартные катетеры плохо видны при визуализации ультразвуком или полностью невидимы при магнитно-резонансной томографии. Использование инструментария с поддержкой FBG в комбинации с визуализацией облегчило бы руководство вмешательством, так как устройство получения изображения обеспечивает обратную связь о свойствах ткани/органа, тогда как зондирование FBG будет обеспечивать информацию о свойствах инструмента.
Следует понимать, что инструменты, описанные здесь, могут иметь много функциональных возможностей и вариаций. Например, инструменты (100, 200 и т.д.) могут включать в себя рабочий канал или просвет 215 для обеспечения обходного пути жидкостям, применения всасывания, для того чтобы позволить перемещение других приспособлений и инструментов, и т.д.
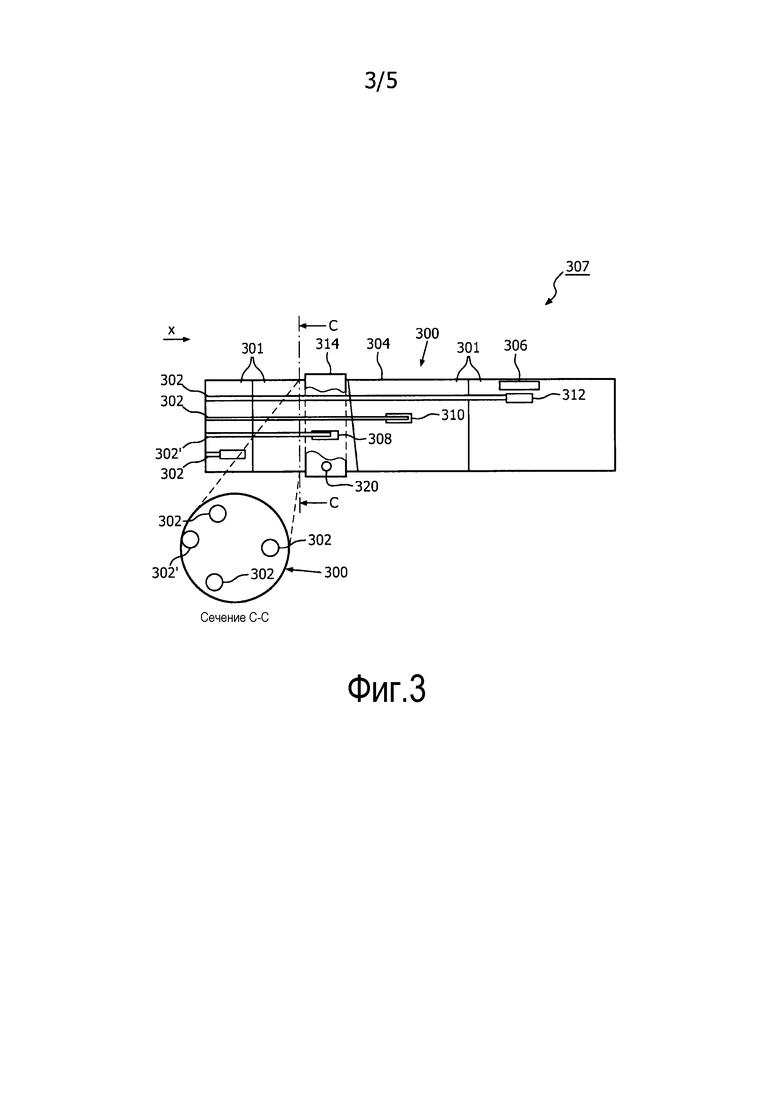
На фиг.3 иллюстративное интервенционное медицинское устройство 300 включает в себя одно или более зондирующих форму волокон 302, каждое с одной зондирующей биофизический параметр сердцевиной и контактом/окном 306 с внешней средой 307. Удлиненный инструмент 304 имеет датчики на основе FBG для измерения температуры, напряжения, магнитного поля, химической концентрации и т.д. для достижения дополнительного потенциала миниатюризации. Для измерения скалярных полей, таких как температура или напряжение, используется одно оптоволокно с решетками FBG, распределенными вдоль интересующей длины (в зависимости от применения). Для многопараметрического зондирования в иллюстративном примере покрытия, используемые для последовательных FBG, могут чередоваться так, чтобы чувствительный к температуре FBG 308 был расположен около чувствительного к напряжению FBG 310, с идущим за ним чувствительным к давлению FBG 312 в чередующемся порядке. Порядок и распределение/расстояние между этими FBG может варьироваться согласно типу и применению инструмента.
Учитывая непосредственную близость каждого из этих типов FBG и датчика 311, дополнительного зондирующего форму волокна 302, встроенного в инструмент 300, можно также применить измеренные деформации от зондирующих форму волокон для получения измерений температуры, давления или напряжения с поправкой на деформацию. Измеренные биофизические параметры, такие как температура, используются для получения скорректированных оценок для формы волокна (так как сдвиги длины волны в решетках FBG чувствительны к деформации, также как к температуре). Таким образом, могут быть выполнены точные и соответствующие многопараметрические измерения для регулировки и дополнительного предоставления информации во время интервенционной процедуры.
Чтобы гарантировать, что FBG для измерения биофизических параметров в состоянии зондировать условия окружающей среды, показан вариант воплощения, в который зондирующее биофизический параметр волокно 302' внецентровым образом расположено близко к внешнему периметру инструмента 300. Для решеток FBG, чувствительных к температуре или напряжению, металлическое или проводящее кольцо 314 размещено вокруг инструмента 300 в контакте и с температурным датчиком 308 FBG и с внешней средой, чтобы гарантировать взаимодействие. Для решеток FBG 310, чувствительных к давлению, могут использоваться окна 306 или 320 во внешнем периметре инструмента или около местоположения решеток FBG для обеспечения воздействия условий давления во внешней среде на датчик(и) FBG (эти окна 306 или 320 могут или быть открытыми или покрытыми тонкой мембраной отверстиями). Эти окна 306 или 320 могут иметь возможность закрываться и управляться оператором по мере необходимости.
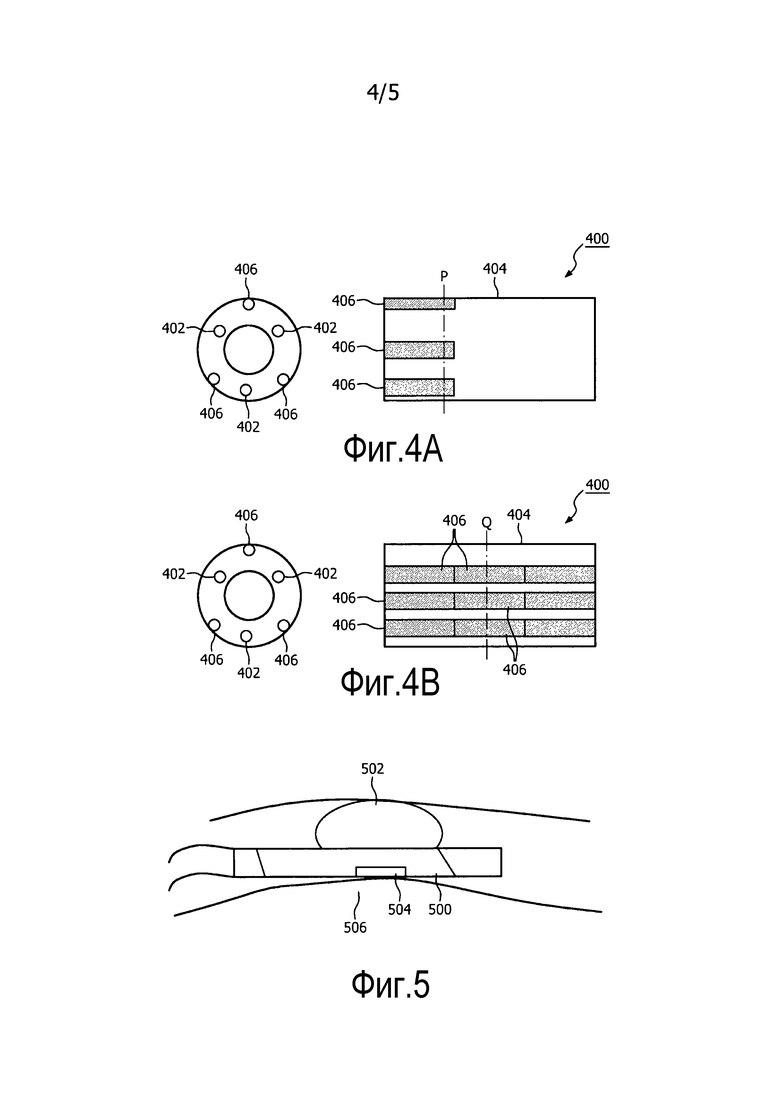
На фиг.4A и 4B слева показано иллюстративное интервенционное медицинское устройство 400 в сечении и справа иллюстративная боковая схема для демонстрации настоящих концепций. Устройство 400 включает в себя зондирующие форму волокна 402 в удлиненном медицинском инструменте 404 с множеством зондирующих биофизические параметры сердцевинами или датчиками 406, которые могут включать в себя контакты или окна во внешнюю среду для выполнения измерений. Расположенные в ряд многопараметрические зондирующие сердцевины изображены на фиг.4A, в то время как фиг.4B показывает расположенные в шахматном порядке многопараметрические зондирующие сердцевины или датчики.
Конструкции с множеством сердцевин, измеряющих биофизические параметры волокон или датчиков 406, могут быть расположены вокруг зондирующих форму волокон 402, чтобы позволить зондирование параметров во множестве точек вокруг периферии инструмента. Если решетки FBG в этих сердцевинах расположены в ряд (как на фиг.4A) так, что каждый FBG в одном и том же осевом сечении (в положении P) зондирует один и тот же биофизический параметр, например температуру, измерения мог быть усреднены для получения более высокого отношения сигнала к шуму (SNR).
Альтернативно, сердцевины или датчики 406 могут быть расположены в шахматном порядке (как изображено на фиг.4B) так, что в одной и той же аксиальной точке контакта (Q) каждая из FBG зондирует разный биофизический параметр, позволяя осуществлять многопараметрическое зондирование в одном и том же местоположении вдоль инструмента 400. Как и на фиг.1-3, эти многопараметрические измерения могут использоваться совместно для получения более точных скорректированных оценок температуры, деформации и т.д. Следует понимать, что могут существовать много вариаций описанных вариантов воплощения. Для данной процедуры или применения могут конфигурироваться разные функциональные возможности и разные параметры. В некоторых вариантах воплощения удлиненный инструмент может иметь возможность реконфигурации, чтобы позволить настройку расположения датчиков FBG, или даже плотности волокон, или положения относительно периферии, или другой функциональной возможности инструмента. Следует также понимать, что оптоволокно может быть заменено другими передающими сигналы устройствами, и что оптические датчики могут включать в себя неоптические датчики.
На фиг.5 могут использоваться дополнительные механизмы или функциональные возможности для настройки или увеличения функциональности инструментов в соответствии с настоящими принципами. Любой из описанных вариантов воплощения может использоваться вместе с устройством 502 стабилизации/механической фиксации (например, на основе надувных баллонов или других механических конструкций) для инструмента 500 (подобного описанным инструментам 100, 200, 300) для получения опорного местоположения для измерений. Например, надувание баллона может использоваться для фиксирования термочувствительного FBG 504 в анатомическом местоположении 506, требуемом для контрольных измерений температуры далеко от участка абляционной терапии.
Другой механизм, который может использоваться путем применения решеток FBG, включает в себя механизм обратной связи, используемый для обратной связи или управления навигацией или доставкой терапии на основании распределенных измерений множеством датчиков (например, контрольной температуры в фиксированной точке, удаленной от участка абляции для контроля и управления повышением температуры, следующим за доставкой энергии). Информация, собранная на этом участке, используется для предоставления информации технику или хирургу для обеспечения ответной реакции на события, происходящие на участке (например, 506). Система 150, изображенная на фиг.1, например, может использоваться для сбора и использования обратной связи во время процедуры.
Например, датчики (оптические или неоптические) предпочтительно распределены так, что деформация, вибрация или любой другой вид искажения, индуцированный в сегменте инструмента, измеряется для определения или реакции ткани на инструмент во время интервенционной процедуры, или обратной связи от инструмента о взаимодействии инструмента и ткани (например, тактильной обратной связи во время навигации инструмента в просвете).
На фиг.6 иллюстративно изображен медицинский интервенционный способ или процедура. В блоке 602 обеспечивается интервенционный инструмент, включающий в себя удлиненный гибкий элемент, имеющий одну или более секций, которые могут быть сегментированы и расположены продольно. По меньшей мере одно оптоволокно расположено внутри гибкого элемента, и множество оптических датчиков соединено по меньшей мере с одним оптоволокном и распределено вдоль длины гибкого элемента так, что оптические датчики расположены для контроля отдельных параметров одновременно вдоль гибкого элемента для обеспечения распределенного зондирования. В блоке 604 интервенционный инструмент направляется в корпус для выполнения медицинской процедуры. В блоке 606 в одном дополнительном варианте воплощения набор оптических датчиков, соответствующих множеству оптоволокон, расположен в ряд, при этом расположенный в ряд набор включает в себя датчик, соответствующий каждому волокну так, что расположенный в ряд набор измеряет один и тот же параметр в одном и том же аксиальном положении вдоль длины гибкого элемента. В блоке 608 в другом дополнительном варианте воплощения набор оптических датчиков, соответствующих множеству оптоволокон, расположен в шахматном порядке, при этом расположенный в шахматном порядке набор включает в себя датчик, соответствующий каждому волокну так, что расположенный в шахматном порядке набор измеряет разные параметры в одном и том же аксиальном положении вдоль длины гибкого элемента.
Массив датчиков может использоваться для картирования, контроля, применения терапии и т.д. в данной области. В блоке 610 данные одновременно собираются из множества источников данных соответствующими датчиками. Выполняется тестирование или терапия или любое другое действие с использованием оптоволоконного интервенционного инструмента. В одном варианте воплощения соответственные датчики расположены относительно; относительное положение определяется так, чтобы обеспечить близость к разным источникам данных, когда гибкий элемент располагается в положении сбора данных в блоке 612.
В блоке 614 сегментарное движение двух или более сегментов измеряется для обеспечения более точной позиционной ориентации инструмента. В другом варианте воплощения деформация сегмента инструмента измеряется с использованием распределенных датчиков для определения реакции ткани на инструмент во время интервенционной процедуры. В блоке 616 волокна и массивы датчиков могут настраиваться, и их положение может изменяться для обеспечения гибкой конструкции для приспособления к данной процедуре.
Настоящие принципы обеспечивают системы и способы для осуществления клинических, хирургических или тестировочных применений с использованием волоконно-оптической технологии в медицинском инструментарии. Клинические применения включают в себя, но не ограничиваются только этим, навигацию, картирование и абляцию при помощи катетера для лечения фибрилляции предсердий или желудочковых аритмий (FBG-функционализированный абляционный катетер, петлевой катетер легочных вен, катетер коронарного синуса и т.д.), контроль легочных венозных сокращений, ресинхронизирующую сердечную терапию и обследование сердечной сократимости/электромеханической синхронности, или развертывание устройства кардиального фильтра или надувного баллона, транскатетерное протезирование клапана и процедуры (визуализация, биопсия, абляция, транслюминальная эндоскопическая хирургия через естественные отверстия (NOTES) и т.д.) в кардиальных, легочных или телесных вмешательствах при помощи эндоскопии с поддержкой FBG. Также существуют и предусмотрены настоящими вариантами воплощения другие применения и процедуры, где применимы настоящие принципы.
При интерпретации прилагаемой формулы изобретения следует понимать, что:
а) слово "содержащий" не исключает наличия других элементов или действий помимо перечисленных в данном пункте формулы изобретения;
б) единственное число элемента не исключает возможности наличия множества таких элементов;
в) любые ссылочные позиции в формуле изобретения не ограничивают ее объем;
г) несколько "средств" могут быть представлены одним и тем же элементом, или аппаратными средствами, или программно- реализованной структурой, или функцией; и
д) никакая заданная последовательность действий не является необходимой, если специально не указано иное.
Описав предпочтительные варианты воплощения для систем и способов для интервенционных инструментов с поддержкой оптического зондирования для быстрых распределенных измерений биофизических параметров (которые предназначены для иллюстрации, а не ограничения), следует отметить, что в свете вышеупомянутых идей специалистами в области техники могут быть выполнены модификации и вариации. Поэтому следует понимать, что изменения могут быть выполнены в конкретных раскрытых вариантах воплощения раскрытия, которые находятся в рамках объема вариантов воплощения, раскрытого здесь, как описано в прилагаемой формуле изобретения. Таким образом, описав детали и особенности, требуемые патентным законодательством, то, что заявлено и что необходимо защитить патентом на изобретение, сформулировано в прилагаемой формуле изобретения.
Группа изобретений относится к медицине. Медицинский интервенционный способ для контроля разных параметров реализуют с помощью системы для интервенционной процедуры, которая содержит интервенционный инструмент и рабочую станцию. Интервенционный инструмент содержит удлиненный гибкий элемент, имеющий одну или более сегментированных секций, расположенных продольно, оптоволокно, расположенное внутри гибкого элемента, и множество оптических датчиков, соединенных с оптоволокном и распределенных вдоль длины гибкого элемента так, что датчики расположены для контроля множества разных параметров одновременно в разных положениях и для разных источников данных вдоль гибкого элемента, чтобы обеспечить распределенное зондирование. Множество разных параметров включает в себя физиологические параметры пациента и параметры интервенционного инструмента. Рабочая станция сконфигурирована для обеспечения интерфейса для управления интервенционным инструментом и выполнения процедуры с использованием интервенционного инструмента. Достигается повышение точности локализации интервенционного инструмента. 3 н. и 25 з.п. ф-лы, 6 ил.
1. Интервенционный инструмент для контроля множества разных параметров, причем упомянутый интервенционный инструмент содержит:
удлиненный гибкий элемент (100), имеющий одну или более сегментированных секций (101), расположенных продольно;
по меньшей мере одно оптоволокно (104), расположенное внутри гибкого элемента;
множество датчиков (102), соединенных с по меньшей мере одним оптоволокном и распределенных вдоль длины гибкого элемента так, что датчики расположены для контроля упомянутого множества разных параметров одновременно в по меньшей мере одном из разных положений и для разных источников данных вдоль гибкого элемента, чтобы обеспечить распределенное зондирование, причем упомянутое множество разных параметров включает в себя физиологические параметры пациента и параметры интервенционного инструмента.
2. Инструмент по п. 1, в котором удлиненный гибкий элемент (100) включает в себя одно из: проволочные направители, катетеры и эндоскопический инструмент.
3. Инструмент по п. 1, в котором по меньшей мере одно оптоволокно (104) включает в себя множество оптоволокон, распределенных в пределах гибкого элемента.
4. Инструмент по п. 3, дополнительно содержащий расположенный в ряд набор датчиков (4 06), соответствующих упомянутому множеству оптоволокон (104), где расположенный в ряд набор включает в себя датчик, соответствующий каждому волокну так, что расположенный в ряд набор измеряет один и тот же параметр в одном и том же аксиальном положении вдоль длины гибкого элемента.
5. Инструмент по п. 3, дополнительно содержащий расположенный в шахматном порядке набор датчиков (406), соответствующих упомянутому множеству оптоволокон (104), где расположенный в шахматном порядке набор включает в себя датчик, соответствующий каждому волокну так, что расположенный в шахматном порядке набор измеряет разные параметры в одном и том же аксиальном положении вдоль длины гибкого элемента.
6. Инструмент по п. 1, в котором инструмент используется в сочетании с данными (130) визуализации, полученными до процедуры, во время процедуры или одновременно с оптическим опросом.
7. Инструмент по п. 1, в котором датчики (102) измеряют по меньшей мере одно из: движение, деформацию, магнетизм, положение, напряжение, температуру, давление, биохимическое состояние и цвет.
8. Инструмент по п. 1, в котором по меньшей мере два датчика (102) имеют относительное положение между ними, причем относительное положение определяется так, чтобы обеспечить близость к разным источникам данных, когда гибкий элемент расположен в положении сбора данных так, что данные собираются одновременно от каждого источника данных соответственным датчиком из этих по меньшей мере двух датчиков.
9. Инструмент по п. 1, в котором одна или более сегментированных секций (101) включают в себя один или более сегментов, включающих в себя оптические датчики, при этом оптические датчики измеряют сегментарное движение каждого сегмента.
10. Инструмент по п. 9, в котором датчики (102) распределены так, что искажение, индуцированное в сегменте инструмента, измеряется для определения одного из: реакции ткани на инструмент или обратной связи от инструмента о взаимодействии инструмента и ткани.
11. Инструмент по п. 1, в котором гибкий элемент включает в себя закрывающееся отверстие для открытия датчика, расположенного внутри гибкого элемента.
12. Система для интервенционной процедуры, включающей в себя контроль множества разных параметров, причем упомянутая система содержит:
интервенционный инструмент (100), включающий в себя удлиненный гибкий элемент, имеющий одну или более сегментированных секций (101), расположенных продольно, по меньшей мере одно оптоволокно (104), расположенное внутри гибкого элемента, и множество оптических датчиков (102), соединенных по меньшей мере с одним оптоволокном и распределенных вдоль длины гибкого элемента так, что оптические датчики расположены для контроля упомянутого множества разных параметров одновременно по меньшей мере в одном из разных положений и для разных источников данных, чтобы обеспечить распределенное зондирование, причем упомянутое множество разных параметров включает в себя физиологические параметры пациента и параметры интервенционного инструмента; и
рабочую станцию (112), сконфигурированную обеспечивать интерфейс (159) для управления интервенционным инструментом и выполнения процедуры с использованием интервенционного инструмента.
13. Система по п. 12, дополнительно содержащая систему (112, 116) отслеживания положения или формы для отслеживания инструмента во время интервенционной процедуры, при этом рабочая станция включает в себя такое отображение, что данные положения, собранные от инструмента, накладываются на данные изображения.
14. Система по п. 12, дополнительно содержащая механизм (154) терапии, расположенный на инструменте и управляемый с использованием рабочей станции так, что терапия применяется к ткани во время интервенционной процедуры.
15. Система по п. 12, дополнительно содержащая механизм (122) фиксации, расположенный на инструменте и управляемый с использованием рабочей станции так, что активирование механизма фиксации стабилизирует или позиционирует по меньшей мере один из датчиков относительно целевого местоположения во время интервенционной процедуры.
16. Система по п. 12, в которой по меньшей мере одно оптоволокно включает в себя множество оптоволокон (104), распределенных в пределах гибкого элемента и дополнительно содержащих расположенный в ряд набор оптических датчиков (406), соответствующих упомянутому множеству оптоволокон, где расположенный в ряд набор включает в себя датчик, соответствующий каждому волокну так, что расположенный в ряд набор измеряет один и тот же параметр в одном и том же аксиальном положении вдоль длины гибкого элемента.
17. Система по п. 12, в которой по меньшей мере одно оптоволокно включает в себя множество оптоволокон (104), распределенных в пределах гибкого элемента и дополнительно содержащих расположенный в шахматном порядке набор оптических датчиков (406), соответствующих упомянутому множеству оптоволокон, где расположенный в шахматном порядке набор включает в себя датчик, соответствующий каждому волокну так, что расположенный в шахматном порядке набор измеряет разные параметры в одних и тех же аксиальных положениях вдоль длины гибкого элемента.
18. Система по п. 12, в которой по меньшей мере два датчика (102) имеют относительное положение между ними, причем относительное положение определяется так, чтобы обеспечить близость к разным источникам данных, когда гибкий элемент расположен в положении сбора данных так, что данные собираются одновременно от каждого источника данных соответственным датчиком из по меньшей мере двух датчиков.
19. Система по п. 12, в которой одна или более сегментированных секций (101) включают в себя множество сегментов, включающих в себя оптические датчики (102), при этом оптические датчики измеряют сегментарное движение каждого сегмента.
20. Система по п. 19, в которой оптические датчики (102) распределены так, что деформация сегмента инструмента измеряется для определения реакции ткани на инструмент во время интервенционной процедуры.
21. Система по п. 12, в которой гибкий элемент включает в себя закрывающееся отверстие (306, 320) для открытия датчика, расположенного внутри гибкого элемента.
22. Система по п. 12, в которой инструмент используется в сочетании с данными (130) визуализации, полученными до процедуры, во время процедуры или одновременно с оптическим опросом.
23. Медицинский интервенционный способ для контроля множества разных параметров, причем упомянутый медицинский интервенционный способ содержит:
обеспечение (602) интервенционного инструмента, включающего в себя удлиненный гибкий элемент, имеющий одну или более сегментированных секций, расположенных продольно, по меньшей мере одно оптоволокно, расположенное внутри гибкого элемента, и множество оптических датчиков, соединенных по меньшей мере с одним оптоволокном и распределенных вдоль длины гибкого элемента так, что оптические датчики расположены для контроля упомянутого множества разных параметров одновременно по меньшей мере в одном из разных положений и для разных параметров источников данных вдоль гибкого элемента, чтобы обеспечить распределенное зондирование, причем упомянутое множество разных параметров включает в себя физиологические параметры пациента и параметры интервенционного инструмента; и
направление (604) интервенционного инструмента в тело для выполнения медицинской процедуры.
24. Способ по п. 23, дополнительно содержащий расположение (606) в ряд набора оптических датчиков, соответствующих множеству оптоволокон, где расположенный в ряд набор включает в себя датчик, соответствующий каждому волокну так, что расположенный в ряд набор измеряет один и тот же параметр в одном и том же аксиальном положении вдоль длины гибкого элемента.
25. Способ по п. 23, дополнительно содержащий расположение (608) в шахматном порядке набора оптических датчиков, соответствующих упомянутому множеству оптоволокон, где расположенный в шахматном порядке набор включает в себя датчик, соответствующий каждому волокну так, что расположенный в шахматном порядке набор измеряет разные параметры в одном и том же аксиальном положении вдоль длины гибкого элемента.
26. Способ по п. 23, дополнительно содержащий сбор (610) данных одновременно от множества источников данных соответственными датчиками, при этом соответственные датчики имеют относительное положение между ними, причем относительное положение определяется так, чтобы обеспечить близость к разным источникам данных, когда гибкий элемент расположен в положении сбора данных.
27. Способ по п. 23, дополнительно содержащий измерение (614) сегментарного движения двух или более сегментов одной или более сегментированных секций.
28. Способ по п. 27, дополнительно содержащий измерение (614) деформации сегмента инструмента с использованием распределенных датчиков для определения реакции ткани на инструмент во время интервенционной процедуры.
| WO 2009049038 A1, 16.04.2009 | |||
| WO 2007109778 A1, 27.09.2007 | |||
| WO 03094723 A1, 20.11.2003 | |||
| US 6315712 B1, 13.11.2001 | |||
| JP 2008173397 A, 31.07.2008 | |||
| JP H08182665 A, 16.07.1996 | |||
| ВИДЕОЛАПАРОСКОП | 2001 |
|
RU2208375C2 |
| ПАНОРАМНЫЙ СВЕТОВОЛОКОННЫЙ ЭНДОСКОП | 1996 |
|
RU2116044C1 |
| Буровой станок для бурения скальных пород | 1957 |
|
SU113060A1 |
| US 2002052546 A1, 02.05.2002 | |||
| EP 1319364 A2, 18.06.2003. | |||

