Область техники, к которой относится изобретение
Изобретение относится к системам биосенсоров, содержащим картридж биосенсора и первый магнитный узел биосенсора с двумя магнитными субблоками для использования с картриджем биосенсора, и к способу для активации магнитных частиц в картридже биосенсора.
Уровень техники
Из уровня техники известны различные аналитические процедуры для обнаружения аналита в опытном образце.
Например, в иммунологическом анализе используют механизмы иммунной системы, при которых антитела и соответствующие антигены способны связываться друг с другом. Этот специфический механизм реакций используется для определения присутствия или количества антигена в опытном образце. В частности, антитело или антиген (аналит, представляющий интерес) помечают для количественного определения взаимодействий между антителом и антигеном. Наиболее употребительными метками являются, например, флуоресцентные и хемилюминесцентные молекулы, окрашенные частицы (гранулы) или радиоизотопы.
В последнее время магнитные метки использовались в микрофлюидальном анализе для выявления наличия или количества аналита. Использование магнитных меток, как, например, магнитных частиц, также именуемых как магнитные гранулы или гранулы, обладает несколькими преимуществами. Магнитные частицы можно активировать, прикладывая магнитное поле таким, что аналитическую процедуру можно ускорить. Кроме того, в биологическом опытном образце отсутствует магнитный фоновый сигнал, влияющий на обнаружение магнитных частиц.
Однако для этих анализов, в которых используются магнитные метки, требуются средства для активации магнитных частиц, связанных с антигенами, иммобилизуемыми вблизи сенсорной поверхности картриджа сенсора, и для смывания оставшихся несвязанных магнитных частиц, не оказывая влияния на измерение количества связанных частиц. Поэтому, например, два магнита могут быть расположены на противоположных сторонах картриджа сенсора, причем первый магнит притягивает магнитные частицы для движения через опытный образец к сенсорной поверхности, а второй магнит притягивает несвязанные магнитные частицы для движения от сенсорной поверхности. В этой конфигурации два магнита смонтированы на несущей структуре, а несущая структура механически перемещает магниты по направлению к сенсорной поверхности или от нее (см. R. Luxton et al., "Use of External Magnetic Field to reduce reaction times in an immunoassay...", Anal. Chem. 2004, 76, 1715-1719).
Такой способ является очень трудоемким и длительным и требует сложную несущую структуру для размещения двух магнитов на противоположных сторонах картриджа сенсора. Кроме того, первый магнит, расположенный ниже картриджа сенсора, регулирует движения магнитных частиц только в направлении, перпендикулярном сенсорной поверхности, но не в горизонтальном направлении, т.е. направлении, по существу параллельном сенсорной поверхности. Поэтому области с накоплениями несвязанных магнитных частиц могут существовать в картридже вблизи областей, где мало или может быть слишком мало магнитных частиц для связывания с антигенами, представляющими интерес. Кроме того, несвязанные частицы в периферийных областях в картридже не могут легко и так же быстро, как другие частицы, притягиваться вторым магнитом таким образом, чтобы эти частицы могли оставаться в картридже. Это может приводить к нежелательным результатам тестов.
В WO2008/107827A1 раскрыта электромагнитная система для биосенсоров, причем система может быстро переключаться между высокими магнитными градиентами, не требуя перемещения механических элементов. Это реализуется посредством двух независимых электромагнитных блоков, которые разделены в области полюсных башмаков над зазором, причем объем образца задается картриджем, и причем сенсорные поверхности биосенсора расположены на одной или более внутренних поверхностях картриджа.
В WO00/32293A1 раскрыто устройство и способы для разделения, иммобилизации и количественного определения биологических веществ изнутри жидкой среды. Биологические вещества исследуют с использованием сосуда, в котором имеется камера, причем сосуд содержит прозрачную накопительную стенку.
В WO2004/078316A1 раскрыто устройство для перемещения магнитных или намагничиваемых микрогранул в капиллярной камере, содержащей постоянный магнит или электромагнит для подвергания капиллярной камеры, по существу, однородному магнитному полю, для приложения к микрогранулам постоянного магнитного момента. По меньшей мере, одну плоскую катушку и, предпочтительно, матрицу перекрывающихся подушек помещают рядом с капиллярной камерой для приложения к микрогранулам дополнительного магнитного поля параллельно или антипараллельно упомянутому, по существу однородному магнитному полю, для приведения микрогранул в движение.
Обычно частицы опытного образца подвергаются нескольким процессам, например частицы приближаются к сенсорной поверхности, связываются с сенсорной поверхностью, освобождаются от сенсорной поверхности и т.д. В известных биосенсорных системах магнитные частицы, находящиеся вблизи магнита, обычно активируются магнитным полем и притягиваются к магниту. В этом случае качество и/или количество сигнала, принимаемого от сенсорной поверхности вблизи магнита, будет зависеть от времени и таким образом не будет надежным, поскольку оно будет отражать не только связанные частицы, но также будет подвержено влиянию и несвязанных магнитных частиц в удаленных зонах картриджа, которые активируются магнитным полем, и таким образом могут перемещаться к сенсорной поверхности вблизи магнита.
Сущность изобретения
Одна задача изобретения состоит в обеспечении биосенсорной системы и способа для регулирования движения магнитных частиц в картридже и таким образом для обеспечения более надежных результатов тестов.
В изобретении раскрыта система биосенсора с картриджем биосенсора, первым магнитным узлом биосенсора, в дальнейшем также называемый первым магнитным узлом, для генерирования магнитного поля в картридже биосенсора, содержащем два магнитных субблока, каждый из которых имеет сердечник с верхней поверхностью, разделенные зазором, и в которой сенсорная поверхность, образованная картриджем биосенсора, расположена выше верхних поверхностей сердечников, причем два субблока адаптированы для генерирования магнитного поля между первым субблоком и вторым субблоком с силовыми линиями магнитного поля, по существу параллельными сенсорной поверхности, чтобы приложить силы к магнитным частицам в картридже выше верхних поверхностей. Термин "биосенсор" здесь используется для всех видов сенсоров, пригодных для обнаружения биологических веществ или биологического материала. Термин "верхняя поверхность" используется здесь для обозначения части сердечника наверху сердечника вблизи сенсорной поверхности, которая имеет форму, отличную от типичной цилиндрической формы сердечника. Верхнюю поверхность выравнивают в направлении к сенсорной поверхности, тогда как сердечник обычно выравнивают вертикально. Поскольку сенсорная поверхность расположена между сердечниками, это означает, что верхняя поверхность охватывает угол с сердечником, который подробно описан ниже. Верхние поверхности образуют профиль магнитного поля. Система биосенсора является компактной, занимает мало места и позволяет осуществлять гибкий контроль движения магнитных частиц. С помощью системы биосенсора описанные магнитные частицы можно перемещать в нескольких направлениях, особенно в направлении влево и вправо, применительно к чертежам. Система биосенсора позволяет смывать избыточные гранулы, не связанные с образцом, с сенсорной поверхности, не разрушая связей связанных гранул.
Конкретные примеры изобретения описаны в зависимых пунктах формулы изобретения.
В примере системы биосенсора второй магнитный узел установлен выше сенсорной поверхности для воздействия сил на магнитные частицы в картридже. Второй магнитный узел может быть сконструирован аналогично узлу из двух субблоков. Второй магнитный узел обеспечивает дополнительное магнитное поле для воздействия сил на гранулы и является управляемым вместе с двумя субблоками с помощью средства управления, управляющего двумя субблоками и верхней катушкой.
Первый магнитный узел биосенсора для генерирования магнитного поля используется в системе биосенсора таким образом, что пространственное перемещение магнитных частиц в картридже биосенсора можно контролировать. За счет генерирования магнитного поля в картридже, аналиты, обычно антигены или вещества, включенные в опытный образец и помеченные магнитными частицами и присутствующие вблизи первого магнитного узла биосенсора, можно перемещать по направлению к сенсорной поверхности в картридже для их связывания с иммобилизованными антителами. Связанную сложную структуру антитела, антигена, который представляет собой тестируемый аналит, и магнитной частицы, функционирующей в качестве метки, можно затем обнаружить на сенсорной поверхности таким образом, что можно оценивать или определять само присутствие, или даже количество аналита в опытном образце. Еще одна неблагоприятная особенность состоит в том, что из-за изменения магнитного поля в картридже для магнитных частиц, присутствующих в картридже, но удаленных от первого магнитного узла биосенсора, движение к сенсорной поверхности может быть затруднено. Это дополнительное явление показано на фиг.1, где изображены различные области силовых линий магнитного поля. В областях, помеченных как В, на краю картриджа, для магнитных частиц или гранул прохождение затруднено из-за силовых линий магнитного поля и соответствующих сил, направленных почти перпендикулярно поверхности и создающих препятствие для гранул. Иными словами, между различными областями в картридже создаются магнитные стенки.
Согласно фиг.1 обеспечена система биосенсора, содержащая картридж биосенсора и первый магнитный узел биосенсора для генерирования магнитного поля в картридже биосенсора. На картридже биосенсора силовые линии магнитного поля находятся в одной области В на краю сенсорной поверхности картриджа, направленные в известной степени таким образом, чтобы блокировать выход гранул за переделы края сенсорной поверхности.
Картридж биосенсора представляет собой контейнер или резервуар для приема жидкого опытного образца, содержащего аналит, например антиген, представляющий интерес. Обычно картридж может иметь, по меньшей мере, одну плоскую базовую область, в частности прямоугольную, или круглую, или эллиптическую базовую область. Базовая область функционирует как сенсорная поверхность, на которой аналит, представляющий интерес, можно анализировать посредством процедур детектирования. Предпочтительно, картридж или, по меньшей мере, плоская базовая область картриджа изготовлена, например, из стекла, циклоолефиновых (со)полимеров, полиэтилена, полистирола, поликарбоната или полиметилметакрилата, чтобы позволить оптический анализ опытного образца.
Картридж биосенсора может содержать или может принимать магнитные или намагниченные частицы. "Магнитные" или "намагниченные" частицы подвергаются влиянию приложения магнитного поля и являются магниточувствительными. Например, эти частицы притягиваются или отталкиваются или обладают поддающейся обнаружению магнитной восприимчивостью или индукцией. В предпочтительном варианте воплощения эти частицы являются парамагнитными или суперпарамагнитными частицами и могут быть изготовлены из металлов, или оксидов металла, или составных материалов, таких как ферриты, например, магнетита. Эти частицы могут представлять собой гранулы или метки и адаптированы для связывания с молекулой-мишенью, например антителом и/или антигеном, аналитом, представляющим интерес. Такое связывание может возникать непосредственно или через конкретный связывающий элемент, такой как, например, белок, захваченный антителом, и/или белок, заключенный между частицей и антителом или антигеном. В одном варианте воплощения картриджа бисенсора, антитела иммобилизуют через захват реагентов на сенсорной поверхности картриджа и обеспечение места связывания для антигена, помеченного магнитной или намагниченной частицей.
В конкретном варианте воплощения, по меньшей мере, одна из верхних поверхностей может иметь наклонный участок, различные формы, поддающиеся расчету, как описано ниже. В другом примере, по меньшей мере, одна из верхних поверхностей имеет плоский участок наверху верхней поверхности, отделенный на 0,1-5 мм от сенсорной поверхности.
В конкретном варианте воплощения, по меньшей мере, один из магнитных субблоков может представлять собой электромагнитный субблок.
Первый магнитный узел системы биосенсора содержит, по меньшей мере, два магнитных субблока. В частности, магнитные субблоки могут представлять собой электромагнитные субблоки, содержащие катушки, обладающие намагничиваемым (магниточувствительным) сердечником внутри каждой катушки. Сердечник можно изготавливать из ферромагнитного материала. Первый магнитный узел биосенсора можно устанавливать таким образом, чтобы один из полюсов каждого субблока примыкал к сенсорной поверхности на одной из сторон картриджа биосенсора. В одном варианте воплощения субблоки в основном имеют цилиндрическую форму в области катушки, а два магнитных полюса присутствуют на двух концах цилиндра (т.е. на базовой области и верхней поверхности цилиндра). Сердечник субблока может иметь диаметр между 0,01 мм и 5 мм, предпочтительно, между 0,02 мм и 2 мм, а высота сердечника может составлять между 3 мм и 10 мм, предпочтительно, 5 мм.
В частности, сердечник магнитного субблока имеет верхнюю поверхность, предпочтительно, расположенную ниже сенсорной поверхности картриджа, которая может содержать плоский участок и наклонный участок. В предпочтительном варианте воплощения плоский участок расположен параллельно сенсорной поверхности картриджа.
В конкретном варианте воплощения напряженность магнитного поля каждого субблока можно изменять по отдельности посредством электрического регулирования.
Термин "изменять по отдельности" означает, что магнитное поле каждого субблока можно изменять посредством электрического регулирования, независимо от любого изменения магнитных полей другого субблока. Если субблоки содержат электромагнитные катушки, как описано выше, изменение напряженности магнитного поля субблока можно осуществлять, изменяя электрический ток, текущий через катушку субблока. В этом случае "электрическое регулирование" означает регулирование электрического тока, текущего через катушки.
Система биосенсора согласно настоящему изобретению предусматривает управление движением магнитных или намагничиваемых частиц, гранул, например меток в картридже биосенсора, из-за измененного магнитного поля первого магнитного узла биосенсора. Предпочтительно, частицами можно управлять для их перемещения непосредственно к сенсорной поверхности картриджа для экономии времени операции. Кроме того, высокой концентрации частиц в конкретном местоположении на сенсорной поверхности можно избежать, изменяя по отдельности напряженность магнитного поля электромагнитных субблоков: из-за отдельного регулирования каждого из субблоков градиент магнитного поля, пропорциональный силе, действующей на частицы, можно регулировать для перемещения частиц в горизонтальном направлении, т.е., по существу, параллельно сенсорной поверхности, и/или, по существу, в вертикальном направлении, т.е. перпендикулярно сенсорной поверхности.
В конкретном варианте воплощения полный анализируемый объем картриджа биодатчика, т.е. объем, анализируемый при анализе биосенсором, может быть подверженным воздействию магнитного поля, генерируемого субблоками.
Область сенсорной поверхности или полный объем картриджа биосенсора может подвергаться воздействию и/или проникновению магнитного поля субблоков. Объем картриджа представляет собой его внутренний объем (за исключением всех входов или выходов для заполнения опытным образцом), в который можно вводить опытный образец, включающий в себя аналит. Площадь сенсорной поверхности картриджа обычно представляет собой плоскую базовую область картриджа, на которой можно иммобилизовать, например, магнитные или намагничиваемые частицы и/или антитела, соответствующие антигенам, как в примере для определяемого аналита. Предпочтительно, картридж биосенсора расположен рядом с первым магнитным узлом биосенсора таким образом, что весь объем картриджа подвержен воздействию и/или проникновению магнитного поля субблоков. В таком случае можно активировать все магнитные или намагничиваемые частицы в картридже, а также можно избежать геометрических ограничений в картридже.
В конкретном варианте воплощения, наклонный участок магнитного субблока может быть наклонен на 100°-170°, предпочтительно, 120°-150°, более предпочтительно, 130°-140°, или 135° по отношению к перпендикуляру к сенсорной поверхности картриджа биосенсора.
В варианте воплощения наклонный участок наклонен к основной оси сердечника магнитного субблока. Если сердечник, по существу, имеет внешнюю форму правильного кругового цилиндра, основная ось представляет собой ось по высоте цилиндра.
В конкретном варианте воплощения каждая из верхних поверхностей может иметь плоский участок, отстоящий на 0,1-10 мм от сенсорной поверхности.
Например, верхняя поверхность сердечника магнитного субблока может иметь наклонный участок и может дополнительно содержать плоский участок. В этом случае плоский участок может быть расположен параллельно сенсорной поверхности в картридже. Расстояние между плоским участком и сенсорной поверхностью может составлять 0,1-10 мм, в частности 0,1-5 мм, а точнее 0,1-3 мм. Близкое расположение между сердечником и сенсорной поверхностью может обеспечивать высокую плотность магнитного поля на сенсорной поверхности и таким образом обеспечивать более надежные результаты тестов.
Согласно изобретению заявлен способ для активации магнитных частиц с помощью системы биосенсора согласно системе биосенсора. При расположении картриджа биосенсора рядом с первым магнитным узлом биосенсора, магнитное поле, генерируемое первым магнитным узлом, может воздействовать на сенсорную поверхность в картридже для регулирования движения к и от сенсорной поверхности для получения надежных результатов тестов.
В конкретном варианте воплощения первый магнитный блок биосенсора и картридж биосенсора, используемые в способе согласно изобретению, являются частями системы биосенсора, как было описано выше.
Способ может позволить регулировать движение магнитных или намагничиваемых частиц в картридже биодатчика для обеспечения более надежных результатов тестов: можно достигнуть равного распределения частиц в горизонтальном и/или вертикальном направлении картриджа, и можно препятствовать оставшимся несвязанным частицам, удаленным от сенсорной поверхности, перемещаться к сенсорной поверхности во время процедуры теста.
В конкретном варианте воплощения способ может включать в себя этап изменения полярности, по меньшей мере, одного из магнитных субблоков.
Например, система может иметь две различные конфигурации, а именно конфигурацию "север-север" и конфигурацию "север-юг", причем конфигурация "юг-юг" и конфигурация "юг-север" обеспечивает такую картину силовых линий магнитного поля, как соответственно конфигурация "север-север" и конфигурация "север-юг". Изменяя полярность, по меньшей мере, одного из субблоков, направление силы вследствие магнитного поля и направленное на магнитные частицы в картридже, можно менять на обратное. Предпочтительно, силу, направленную на магнитную частицу, можно изменять по знаку за счет изменения полярности, по меньшей мере, одного из магнитных субблоков.
В конкретном варианте воплощения первый магнитный узел биосенсора может генерировать предварительно заданный градиент магнитного поля в направлении, параллельном и/или перпендикулярном сенсорной поверхности в картридже биосенсора.
Предпочтительно, градиент магнитного поля, полученный в картридже биосенсора, изменяется в направлении, параллельном и/или перпендикулярном сенсорной поверхности картриджа. При этом, например, частицы можно активировать градиентом для их расположения в заданных областях на сенсорной поверхности в картридже биосенсора для предпочтительной калибровки технологии обнаружения.
В конкретном варианте воплощения наклонный участок может быть наклонен на 100°-170°, предпочтительно, на 120°-150°, более предпочтительно, на 130°-140°, или на 135° относительно перпендикуляра к сенсорной поверхности картриджа биосенсора.
В конкретном варианте воплощения каждая из верхних поверхностей может иметь плоский участок, отстоящий на 0,1-10 мм от сенсорной поверхности.
В частности, субблоки могут быть расположены на базовой структуре (в частности, на базовых областях субблоков, расположенных на базовой структуре), предпочтительно, на ферромагнитной станине. В варианте воплощения базовая структура может быть частью субблоков. Базовая структура может обеспечивать более легкое обращение с первым магнитным блоком биосенсора и может, кроме того, позволить избежать геометрические ограничения, которые могут возникнуть, если субблоки не расположены в одной плоскости. Ферромагнитная станина в качестве базовой структуры может усиливать магнитное поле первого магнитного узла биосенсора за счет концентрации силовых линий магнитного поля магнитного потока внутри станины и таким образом избежать потерь. В частности, базовая структура может иметь форму куба с длиной и шириной между 0,01 мм и 10 мм, предпочтительно, 5 мм или менее 5 мм, и высотой (т.е. направлением к картриджу биосенсора) между 2 мм и 10 мм, предпочтительно 4 мм.
В конкретном варианте воплощения система биосенсора согласно изобретению может дополнительно содержать средство управления, адаптированное для раздельного переключения или регулировки напряженности магнитного поля каждого субблока путем электрического регулирования. В частности, средство управления может переключать ориентацию вектора намагниченности в магнитных субблоках. Средство управления может быть полезным для получения заданного градиента магнитного поля в картридже биосенсора. Напряженность магнитного поля можно повышать или понижать по отдельности для каждого субблока с помощью средства управления, например, повышая или понижая электрический ток в катушках субблоков. Следовательно, в картридже биосенсора можно получить заданный градиент магнитного поля, и полученный градиент магнитного поля можно легко модифицировать с помощью средства управления в любой момент осуществления аналитической процедуры. В частности, средство управления можно адаптировать, изменить градиент магнитного поля в направлении, параллельном (горизонтальном) и/или перпендикулярном (вертикальном) сенсорной поверхности картриджа биосенсора. Благодаря возможности раздельной регулировки напряженности магнитного поля для каждого субблока, можно изменять плотность магнитного потока в картридже. Следовательно, магнитными или намагничиваемыми частицами в картридже биосенсора можно управлять для перемещения их в конкретном пространственном направлении, например в горизонтальном направлении, т.е. параллельно сенсорной поверхности, или в вертикальном направлении, т.е. перпендикулярно сенсорной поверхности. Таким образом, рассеиванием частиц в картридже можно управлять, например ускорять или даже замедлять в каждом пространственном направлении, с использованием средства управления для изменения напряженности магнитного поля субблоков.
В конкретном варианте воплощения система биосенсора согласно изобретению представляет собой систему магнитного биосенсора FTIR (Frustrated Total Internal Reflection, нарушенного полного внутреннего отражения). Из-за того, что оптические лучи и магнитные поля обычно не интерферируют друг с другом, способы оптического обнаружения для анализа наличия и, предпочтительно, количества представляющего интерес аналита в опытном образце являются успешными при использовании магнитных или намагничиваемых частиц в качестве меток. Следовательно, для использования способами оптического обнаружения может хорошо подходить внешняя магнитная активация, поскольку можно избежать помех сенсора, вызванных магнитным полем.
Эти и другие особенности изобретения станут ясными из вариантов воплощения, описанных ниже.
Краткое описание чертежей
Фиг.1 схематически показывает разрез вида сбоку установки для системы биосенсора согласно одному варианту воплощения изобретения с двумя магнитными субблоками, расположенными ниже картриджа, имеющего сенсорную поверхность.
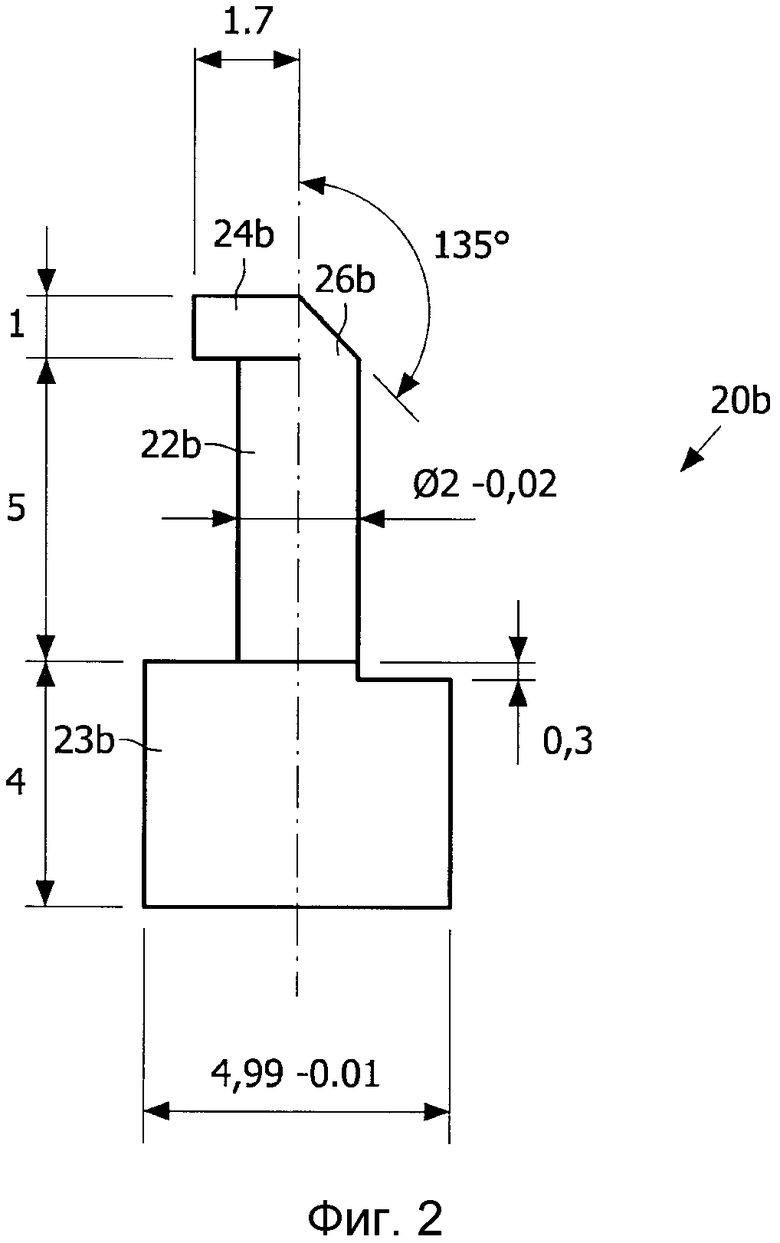
Фиг.2 показывает деталировочный чертеж вида сбоку одного магнитного субблока для использования в изобретении, с обозначением примерных размеров в миллиметрах.
Фиг.3 схематически показывает вид сбоку примера двух магнитных субблоков, расположенных ниже картриджа с другой магнитной катушкой, расположенной выше картриджа, и выравнивание силовых линий магнитного поля вдоль картриджа со схематическими магнитными частицами вблизи сенсорной поверхности не в реальном масштабе, в целях иллюстрации.
Фиг.4 схематически показывает вид сбоку системы биосенсора с другой магнитной катушкой, верхней катушкой, расположенной выше картриджа, картриджем и двумя субблоками, расположенными ниже картриджа, имеющего наконечники (концы) тонкой формы на каждом конце магнитных субблоков.
Фиг.5 схематически показывает вид сбоку системы биосенсора, аналогичной фиг.4, с другой магнитной катушкой, верхней катушкой, расположенной выше картриджа, картриджем и двумя субблоками, расположенными ниже картриджа, имеющего наконечники объемной формы на каждом конце магнитных субблоков.
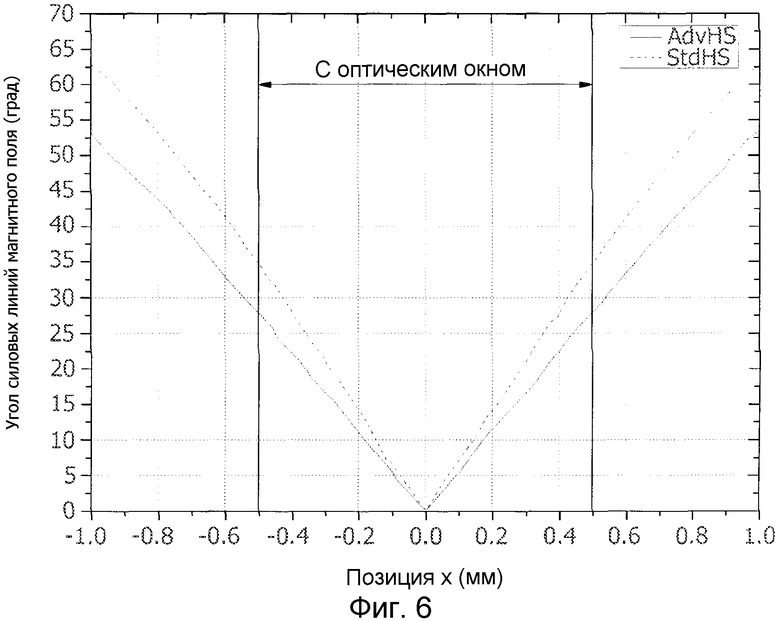
Фиг.6 показывает две кривые, представляющие собой зависимость угла силовых линий магнитного поля от местоположения на сенсорной поверхности для наконечников тонкой формы согласно фиг.4 в виде пунктирной линии, а для наконечников объемной формы согласно фиг.5 в виде непрерывной линии.
Фиг.7 показывает схематический вид сверху двух узких наконечников магнитных субблоков, распределение магнитного поля в зазоре между наконечниками и в оптическом окне между наконечниками, в котором было проведено измерение.
Фиг.8 показывает схематический вид сверху, аналогичный фиг.7, для двух широких наконечников магнитных субблоков, распределение магнитного поля в широком зазоре между наконечниками и в оптическом окне между наконечниками, в котором было проведено измерение.
Подробное описание вариантов воплощения
Фиг.1 показывает вариант воплощения системы биосенсора 1, содержащей первый магнитный узел биосенсора 10 с двумя электромагнитными субблоками 20a, 20b, которые могут быть расположены на базовой структуре 23a, 23b, обычно сформированной неразрывно с субблоками 20a, 20b. В одном предпочтительном варианте воплощения каждый субблок 20a, 20b содержит катушку 21a, 21b и сердечник 22a, 22b внутри катушки 21a, 21b. Изменяя электрический ток, текущий через катушку 21a, 21b, напряженность магнитного поля каждого субблока 20a, 20b можно электрически регулировать. Примером напряженности магнитного поля является напряженность магнитного поля до 40кА/м, примером градиента магнитного поля является градиент магнитного поля до 2∗107A/м2. Как правило, субблоки 20a и 20b располагают на одной стороне картриджа биосенсора 30, обращенной к магнитным субблокам 20a и 20b. Картридж биосенсора 30 показан на фиг.1 как имеющий размер в длину и высоту h. В случае использования базовой структуры 23a, 23b, картридж 30 расположен рядом с субблоками 20a и 20b таким образом, что первый магнитный узел 10 расположен между базовой структурой 23a, 23b и картриджем 30. В конкретном варианте воплощения базовая структура 23a, 23b может представлять собой одиночную станину, как обсуждалось выше. Кроме того, картридж 30 может быть расположен таким образом, чтобы на его объем воздействовало и/или в него проникало магнитное поле первого магнитного узла 10. На фиг.1 магнитные субблоки 20a, 20b имеют конфигурацию "север-юг", вследствие чего силовые линии магнитного поля образуют рисунок на картридже 30, как показано на фиг.1, и могут проникать в сенсорную поверхность 31 в картридже 30. Сенсорная поверхность 31 в картридже 30 служит для обнаружения аналита, который применяют для картриджа 30. Сердечники 22a, 22b субблоков 20a, 20b содержат верхние поверхности 24a, 24b, расположенные наверху сердечников, также обозначаемые в дальнейшем как наконечники, которые имеют наклонные участки 26a, 26b и плоские участки 28a, 28b наверху, как изображено на фиг.1. Предпочтительно, плоские участки 28a, 28b расположены близко к картриджу 30 и/или параллельно сенсорной поверхности 31 в картридже 30. После генерирования магнитного поля в картридже 30 посредством первого магнитного узла биосенсора 10, силовые линии магнитного поля образуют рисунок, как показано на фиг.1, причем силовые линии поля исходят перпендикулярно из верхней поверхности 24a, 24b сердечника 22a, 22b. Ради ясности силовые линии магнитного поля изображены только в области картриджа 30.
Согласно варианту воплощения способа по настоящему изобретению, сенсорная поверхность 31 картриджа 30 расположена выше первого магнитного узла 10, представленного на фиг.1, таким образом, что магнитное поле, полученное из магнитных субблоков 20a, 20b, проникает в объем картриджа 30, в частности во весь анализируемый объем, который анализируют посредством анализа биосенсором. Благодаря наклонным участкам 26a, 26b верхних поверхностей 24a, 24b субблоков 20a, 20b, можно, в частности, регулировать движение магнитных или намагничиваемых частиц 2, присутствующих в картридже 30, или тех, которыми наполнен картридж 30.
Фиг.2 показывает деталировочный чертеж конкретного магнитного субблока 20b, предназначенного для использования в магнитном узле 10, 40 аналогично фиг.1. В частности, изображена и дополнительно описана верхняя поверхность 24b магнитного субблока 20b. Это же справедливо и для субблока 20a, установленного напротив субблока 20b, как было описано. Размеры субблока 20b, как указано на фиг.2, указаны в миллиметрах (мм). В показанном конкретном варианте воплощения, базовая структура 23b имеет высоту 4 мм. В частности, высота базовой структуры 23b субблока 20b может быть между 2 мм и 10 мм, более предпочтительно, между 3 мм и 6 мм. Высота сердечника 22b указана на фиг.2 как 5 мм. В конкретном варианте воплощения высота сердечника 22b может быть между 3 мм и 10 мм, более предпочтительно, между 4 мм и 7 мм. Высота наконечника 24b субблока 20b указана как примерно 1 мм. В конкретном варианте воплощения высота наконечника 24b может быть между 0,5 мм и 3 мм, более предпочтительно, между 0,5 мм и 2 мм. Длина плоского участка верхней поверхности 24b сердечника 22b, как указано на фиг.2, составляет 1,7 мм. В конкретном варианте воплощения длина плоского участка 28b может быть между 1 мм и 3 мм, более предпочтительно, между 1,5 мм и 2 мм. Наклонный участок 26b наконечника или верхняя поверхность 24b указана на фиг.2 как имеющая наклон 135°. В конкретном варианте воплощения этот угол может быть между 100° и 170°, предпочтительно, между 120° и 150°, более предпочтительно, между 130° и 140°. Диаметр цилиндрического сердечника 22b субблока 20b указан на фиг.2 как между 0,02 мм и 2 мм. В конкретном варианте воплощения диаметр сердечника 22b имеет диапазон между 0,01 мм и 5 мм. Противоположные боковые кромки базовой структуры 23b субблока 20b могут быть обеспечены сдвигом, имеющим высоту 0,3 мм согласно варианту воплощения, показанному на фиг.2. В конкретном варианте воплощения высота сдвига может быть между 0,1 мм и 0,5 мм, предпочтительно, между 0,2 мм и 0,4 мм. Длина базовой структуры 23b субблока 20b указана на фиг.2 как между 0,01 мм и 4,99 мм. В конкретном варианте воплощения длина и/или ширина базовой структуры 23b имеет диапазон между 0,01 мм и 10 мм, предпочтительно, между 0,01 мм и 7 мм, или более предпочтительно, менее 5 мм. Эти описанные размеры придерживаются, соответственно, для магнитного субблока 20a.
В конкретном варианте воплощения длина магнитного узла 10, 40, по существу, равна длине картриджа биосенсора 30. В этом случае магнитное поле, генерируемое субблоками 20a, 20b, может проникать в весь объем картриджа 30. При этом частицами 2 можно регулировать в каждой зоне картриджа 30 для получения надежных результатов тестов.
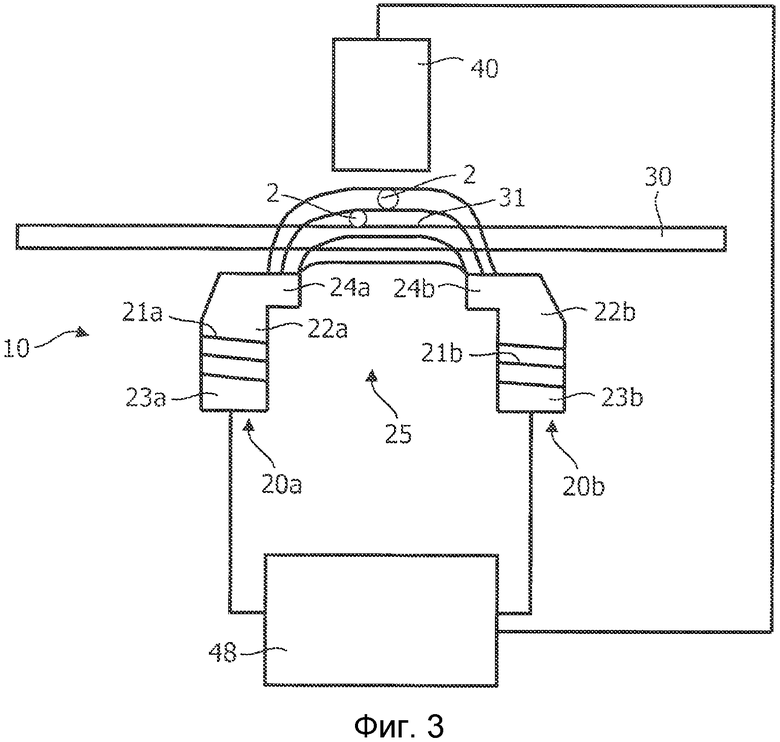
Фиг.3 показывает схематический вид сбоку примера двух магнитных субблоков 20a, 20b, установленных ниже картриджа 30, аналогичного фиг.1. Когда сенсорная поверхность 31 в картридже 30, расположенном выше магнитных субблоков 20a, 20b, имеет большее расстояние до наконечников 24a, 24b, обычно между магнитными субблоками 20a, 20b используют более широкий зазор 25. Субблоки 20a, 20b отделены друг от друга зазором 25. Зазор 25 не обязательно заполняют каким-либо материалом, но заполняют окружающим воздухом, позволяющим перемещение субблоков 20a, 20b относительно друг друга. В еще одном варианте воплощения, зазор 25 может быть заполнен диэлектрическим материалом. Диэлектрический материал может представлять собой пластичный формовочный материал, в который субблоки 20a, 20b могут быть встроены таким образом, что внешняя форма каждого субблока 20a, 20b не видна. В предпочтительном варианте воплощения только одну или обе полярных поверхности каждого субблока 20a, 20b не покрывают диэлектрическим материалом. Диэлектрический материал может функционировать как изолятор между субблоками и может фиксировать расстояние между субблоками 20a, 20b таким образом, что субблоки 20a, 20b неподвижны относительно друг друга. Следовательно, можно избежать дополнительных геометрических ограничений. Обычно зазор 25 между магнитными субблоками 20a, 20b имеет тот же порядок величины, что и расстояние от магнитных субблоков 20a, 20b до сенсорной поверхности 31. Катушки 21a, 21b указаны схематически для дополнительной иллюстрации описанной конструкции и образованы из магнитных субблоков 20a, 20b. Можно использовать различные сочетания полярностей двух магнитных субблоков 20a, 20b (север-юг, север-север, юг-юг, юг-север). На фиг.3 схематически изображена конфигурация с противоположными полюсами наконечников 24a, 24b. При этой конфигурации силовые линии магнитного поля между полюсами двух субблоков 20a, 20b имеют направление, по существу параллельное картриджу 30 в области выше картриджа 30 и сенсорной поверхности 31 на картридже 30. Этот эффект является примерным и схематически показан в виде четырех силовых линий поля, выходящих из одного полюса магнитного субблока 20a и входящих во второй полюс противоположного субблока 20b. Форма магнитного поля, генерируемого магнитным узлом 10, 40, напоминает дугу. В результате, силовые линии поля проникают в объем образца, причем в этом образце растворен аналит, например слюна или кровь, под различными углами, в зависимости от поперечного положения картриджа 30 относительно магнитных субблоков 20a, 20b. Другим важным признаком магнитного поля в данной конфигурации полюсов является то, что оно имеет градиент магнитного поля, направленный к сенсорной поверхности 31, посредством которого воздействует сила, действующая на магнитные частицы 2 по направлению к сенсорной поверхности 31.
Еще один магнитный узел, называемый вторым магнитным узлом 40, устанавливают выше картриджа 30, как видно на фиг.3, который изображен схематически. Второй магнитный узел 40 регулируется отдельно системой биосенсора 1 и, например, обозначается в виде катушки или магнитного узла 40 с множественными магнитными субблоками. Второй магнитный узел 40 может быть обозначен аналогично одному или обоим магнитным субблокам 20a, 20b. В случае второго магнита с архитектурой с одной катушкой с одним сердечником, в области между вторым магнитным узлом 40 и картриджем 30 силовые линии магнитного поля почти перпендикулярны картриджу 30, когда активирован только второй магнитный узел 40, а магнитное поле, генерируемое двумя магнитными субблоками 20a, 20b, деактивировано. Магнитные силы, исходящие от второго магнитного узла 40, воздействуют на магнитные частицы 2 и заставляют магнитные частицы 2 двигаться от картриджа 30. Скоординированное регулирование второго магнитного узла 40 и двух субблоков 20a, 20b средством управления 48 обеспечивает регулированное приложение сил к магнитным частицам 2 в анализируемой жидкости относительно плоскости согласно фиг.3. Для полноты описания, схематически изображено средство управления 48, которое управляет двумя субблоками 20a, 20b и вторым магнитным узлом 40. Средство управления 8 включает, выключает и регулирует напряженность магнитного поля двух субблоков 20a, 20b и второго магнитного узла 40 в соответствии с рабочим состоянием. Рабочие состояния представляют собой, например, состояние параллельной промывки, при которой силы прикладываются в направлении, по существу параллельном сенсорной поверхности 31 для смыва избыточных гранул 2. Другое рабочее состояние представляет собой состояние активации, при котором гранулы 2 притягивают к сенсорной поверхности 31, создавая связи на образце (не показан). Процесс связывания гранул 2 с аналитами и антигенами для образца (не показан) известен и описан в уровне техники. С помощью описанной системы биосенсора 1 процесс связывания и скорость этого процесса повышается, поскольку гранулы 2 приближаются к образцу (не показан) быстрее из-за магнитных сил. Расстояние между наконечниками 24a, 24b двух субблоков 20a, 20b выбирают применительно к расстоянию до местоположения, где магнитные гранулы 2 должны быть активированы, то есть до области выше сенсорной поверхности 31 в картридже 30. Термин активация известен из уровня техники и в основном означает процесс подачи магнитных частиц 2 к образцу (не показан) для связывания магнитных частиц 2 и аналита с образцом (не показан) различными способами, известными из уровня техники. Кроме того, описанную систему биосенсора 1 также можно применять для картриджа биосенсора 30, в котором измерение осуществляют без связывания аналита и магнитных частиц 2 с образцом (не показан).
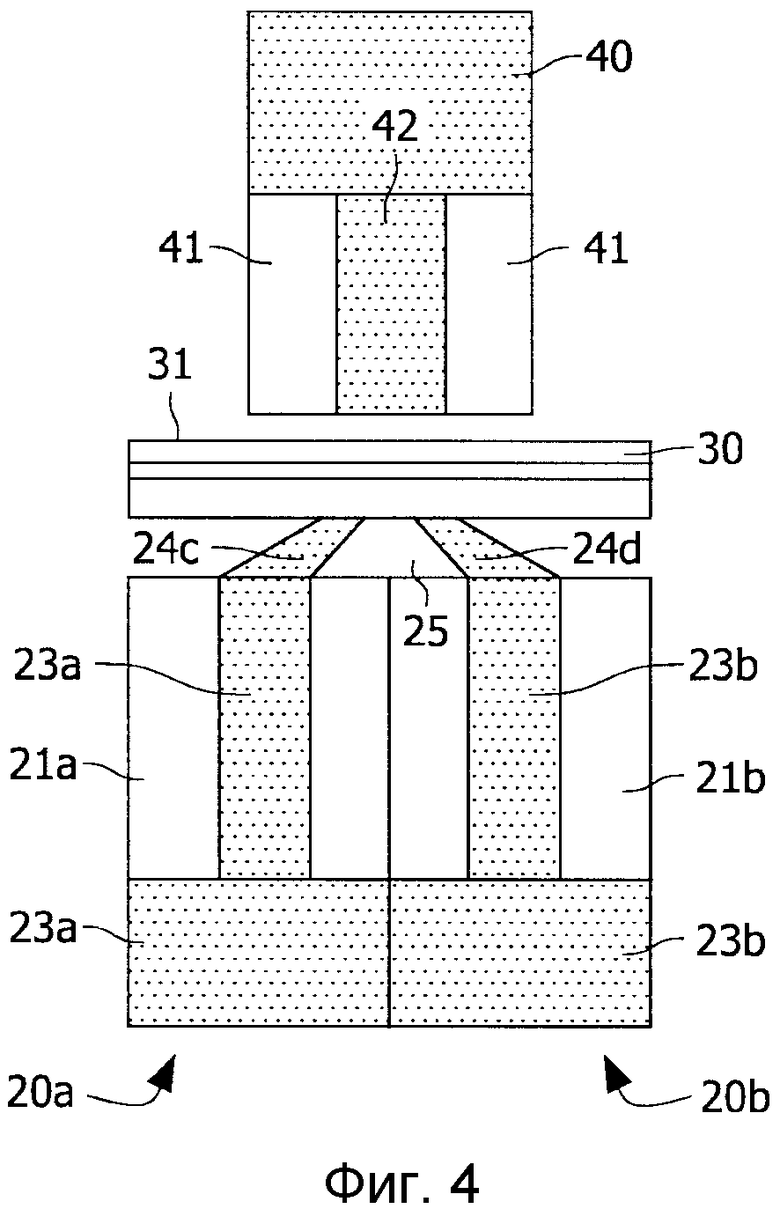
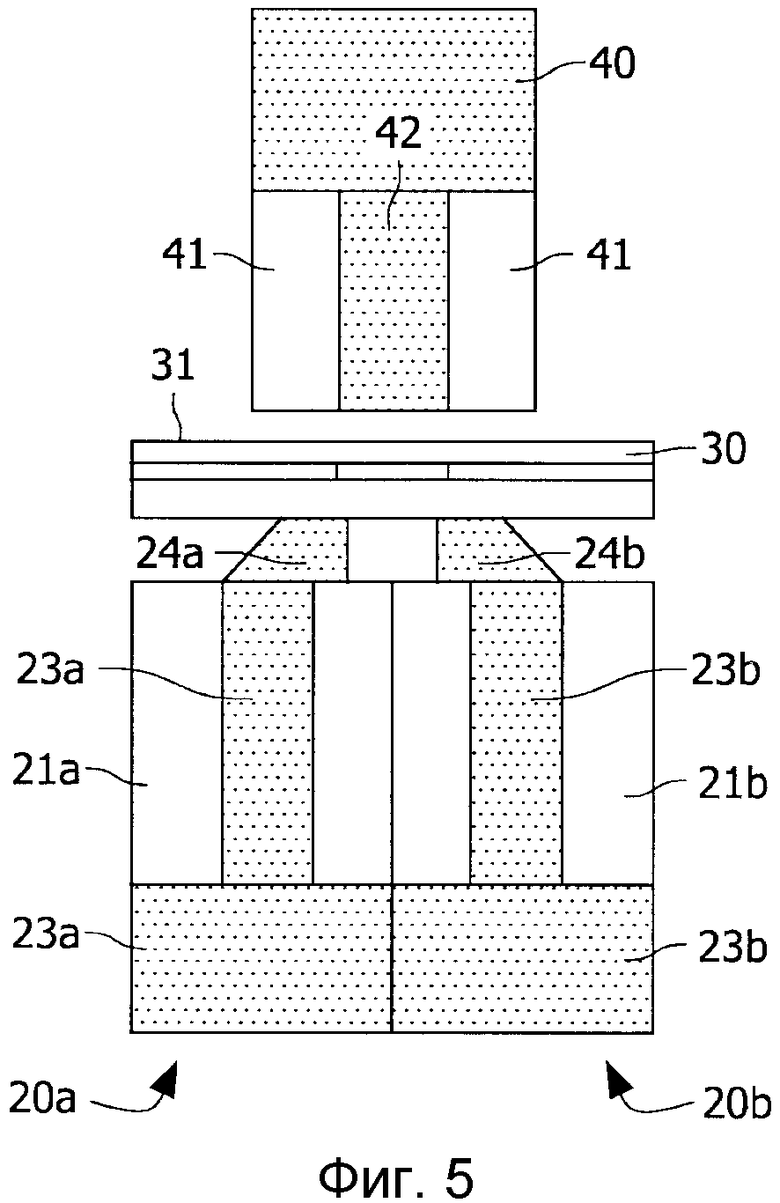
Фиг.4 схематически показывает вид сбоку системы биосенсора 1, аналогичной фиг.1, показывающей определенный пример верхних поверхностей 24c, 24d, другой пример верхних поверхностей 24a, 24b показан на фиг.5. Как и на фиг.3, система биосенсора 1 дополнительно содержит второй магнитный узел 40 наверху биосенсорной системы 1, содержащей сердечник 42 и катушку 41, причем второй магнитный узел 40 расположен выше картриджа 30 относительно иллюстрации согласно чертежам. Второй магнитный узел 40 установлен на другой стороне картриджа 30 субблоков 20a, 20b, причем картридж 30 включает в себя сенсорную поверхность 31, расположенную между вторым магнитным узлом 40 и двумя субблоками 20a, 20b. Два субблока 20a, 20b под картриджем 30 разделены зазором 25 в области наконечников 24c, 24d магнитных субблоков 20a, 20b. Это означает, что углубленная область расположена между наконечниками 24c, 24d, которые регулярно смонтированы интегрально с каждым из субблоков 20a, 20b, как указано на фиг.4, фиг.5. Как было описано, верхние поверхности или наконечники 24a, 24b, 24c, 24d выровнены в направлении сенсорной поверхности 31. В примере согласно фиг.4 наконечники 24c, 24d имеют форму, которая описана как тонкая, что означает, что диаметры этих примерных наконечников 24c, 24d понижаются в направлении от сердечников 23a, 23b. Иными словами, наконечники 24c, 24d сужаются в направлении картриджа 30. Наконечники 24c, 24d в данном примере наклонены по направлению друг к другу, как видно на фиг.4, что приводит к более узкому зазору 25 вблизи картриджа 30, чем далеко от картриджа 30 и близко к базовой структуре 23a, 23b субблоков 20a, 20b. В примере по фиг.5 наконечники 24a, 24b имеют форму, которая описана как объемная, что означает, что диаметры этих примерных наконечников 24a, 24b в основном постоянны в направлении от субблоков 20a, 20b. Наконечники 24a, 24b на фиг.5 имеют форму, аналогичную форме наконечников 24a, 24b, подробно описанных для фиг.2. Наконечники 24a, 24b простираются в направлении, по существу перпендикулярном сердечникам 23a, 23b, как изображено на фиг.5, с торцевыми поверхностями наконечников 24a, 24b, далеко от противоположных сердечников 23a, 23b. Это означает, что ширина зазора 25 между наконечниками 24a, 24b является постоянной, в отличие от фиг.4. Оба примера, описанные на фиг.4, фиг.5, приводят к образованию магнитного поля, характеризуемого силовыми линиями магнитного поля, изображенными на фиг.3 для аналогичного примера. Последствия различных примеров наконечников 24a, 24b, 24c, 24d для профиля генерируемого магнитного поля описаны на основе кривой согласно фиг.6.
На фиг.6 показаны две кривые, полученные применительно к системе биосенсора 1, где ось X означает позицию X вдоль сенсорной поверхности 31 картриджа 30 (в мм). Ось Y означает угол α силовых линий магнитного поля. Угол α между силовыми линиями поля и оптическим окном можно рассчитывать из tg(α) = By/Bx, где Bx и By - соответственно, поперечный и вертикальный компоненты вектора плотности магнитного потока. На фиг.6 показана зависимость угла α от поперечной позиции на дне объема образца. Края оптического окна 46 изображены на фиг.6 в виде перпендикулярных линий в позициях -0,5 мм и +5 мм. Видно, что силовые линии поля на краю оптического окна 46 наклонены примерно на 30°. Благодаря симметрии магнитного поля при одинаковых токовых входах на обеих катушках 21a, 21b, силовые линии поля в центре оптического окна 46 в нулевой позиции проходят горизонтально. Верхняя пунктирная кривая характеризует угол α для формы тонких наконечников 24c, 24d согласно фиг.4. Нижняя сплошная линия характеризует угол α для формы объемных наконечников 24a, 24b согласно фиг.5. Угол α, образованный силовыми линиями магнитного поля и поверхностью оптического окна 46, зависит от поперечной позиции X на горизонтальной линии вдоль сенсорной поверхности 31. Как показывают кривые, угол α имеет нулевое значение в нулевой позиции, т.е. в центре оптического окна 46 силовые линии параллельны сенсорной поверхности 31. Угол α повышается почти непрерывно с повышением расстояния от центра в нулевой позиции. Верхняя пунктирная кривая проходит более круто, чем нижняя непрерывная кривая, что означает, что угол α сильнее повышается при наличии тонких наконечников 24c, 24d согласно фиг.4 по сравнению со случаем объемных наконечников 24a, 24b согласно фиг.5. Изменение геометрической формы приводит к снижению угла поля примерно 7° на краю оптического окна 46. Форма наконечников 24a, 24b, 24c, 24d влияет на угол силовых линий магнитного поля, и поэтому на магнитные частицы 2 воздействуют силы, как доказано на фиг.6. При геометрии полюсных наконечников или наконечников 24a, 24b, 24c, 24d распределение магнитного поля для образцов магнитных субблоков 20a, 20b согласно фиг.4 и фиг.5 различается.
В экспериментах было обнаружено, что на основе магнитного субблока 20a, 20b согласно фиг.4 с тонкими наконечниками 24c, 24d гранулы или магнитные частицы 2 при магнитном притяжении образуют цепи, что в конце концов приводит к их притяжению к сенсорной поверхности 31 или поверхности в картридже 30, и цепи выравниваются в соответствии с локальной ориентацией силовых линий магнитного поля. Этот эффект был идентифицирован в качестве одной из причин неоднородного распределения магнитных частиц 2 на сенсорной поверхности 31, которое нежелательно, поскольку этот эффект может искажать корректные измерения.
Система биосенсора 1, имеющая измененную геометрию объемных наконечников 24a, 24b, характеризующую уплощенное распределение углов α, имеет более широкую дугу силовых линий магнитного поля, что исключает образование цепей магнитных частиц 2 и таким образом улучшает распределение магнитных частиц 2.
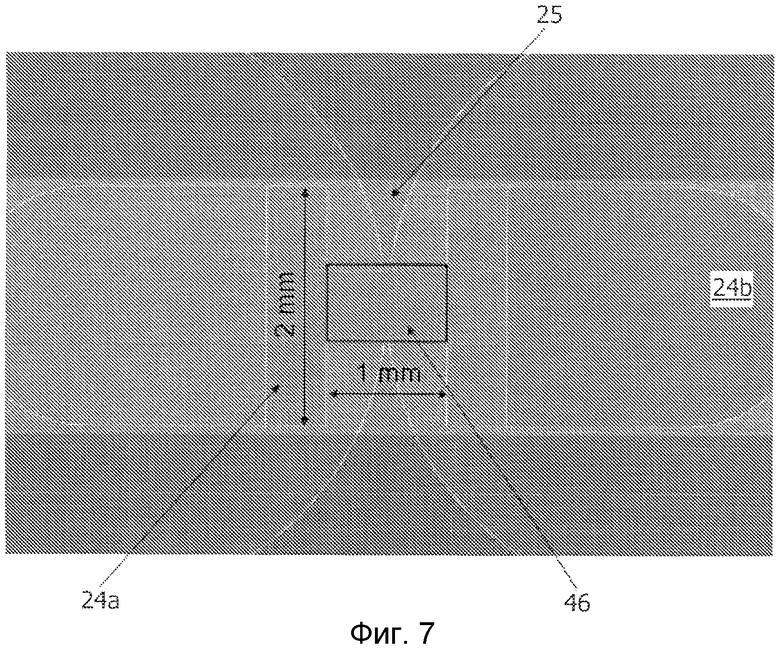
На фиг.7 показан схематический вид сверху двух наконечников 24a, 24b магнитных субблоков 20a, 20b, противоположных друг другу. В этом примере расстояние между наконечниками 24a, 24b выбирают примерно 1 мм. Ширину наконечников 24a, 24b выбирают примерно 2 мм, и эта ширина упоминается здесь как узкая. Оба параметра - ширину наконечников 24a, 24b и расстояние между наконечниками 24a, 24b можно выбирать различными. В зазоре 25 и вокруг наконечников 24a, 24b показано распределение магнитного поля, причем в центре зазора 25 силовые линии магнитного поля в основном параллельны относительно торцевых поверхностей наконечников 24a, 24b. По направлению к краям наконечников 24a, 24b, на фиг.7 вдоль вертикальной линии, далеко от центра зазора 25, силовые линии магнитного поля изгибаются во все большей и большей степени в направлении вокруг наконечников 24a, 24b, образуя возрастающий угол с параллельными силовыми линями магнитного поля в центре зазора 25. На фиг.7 между наконечниками 24a, 24b область вычерчена в центре зазора 25, и эта область представляет собой оптическое окно 46. Как было описано выше, одним способом для обнаружения аналита, присутствующего в картридже 30, обычно после процесса активации, является способ оптического обнаружения. Другие способы обнаружения также поддаются расчету. В области оптического окна 46 магнитное поле выравнивается описанным способом с, по существу, параллельными силовыми линиями магнитного поля. Предпочтительно, измерение системы биосенсора 1 производят в оптическом окне 46, поэтому сенсорную поверхность 31 и аналит помещают в оптическое окно 46 выше наконечников 42a, 42b, как показано на фиг.3, фиг.4 и фиг.5.
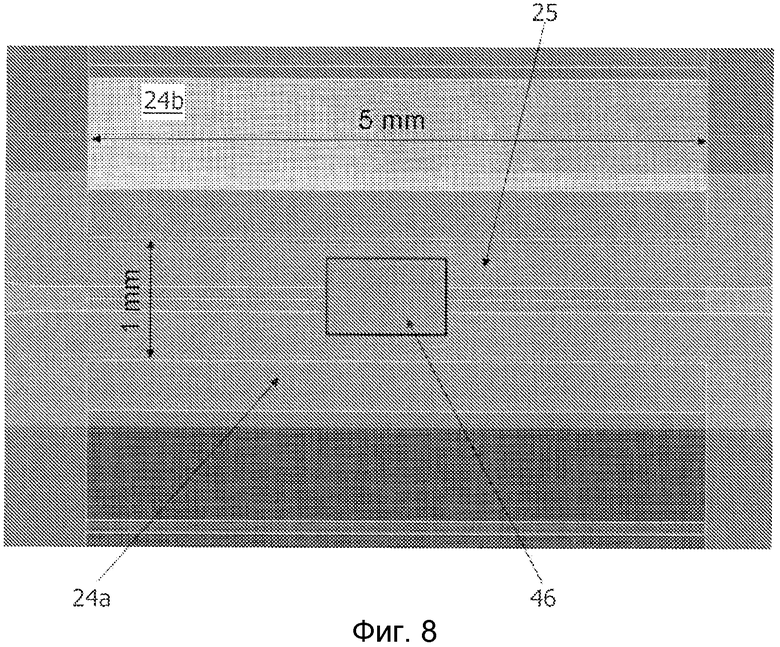
На фиг.8 показан схематический вид сверху, аналогичный фиг.7, двух наконечников 24a, 24b магнитных субблоков 20a, 20b. Вид на конфигурацию, показанный на фиг.8, повернут на 90° по сравнению с фиг.7. Наконечники 24a, 24b магнитных субблоков 20a, 20b на фиг.8 имеют ширину примерно 5 мм, и поэтому они шире, чем наконечники 42a, 42b на фиг.7. Расстояние между наконечниками 24a, 24b в зазоре 25 в примере согласно фиг.7 приблизительно то же самое, что и соответствующее расстояние на фиг.8 и выбрано как l мм. Распределение силовых линий магнитного поля в широком зазоре 25 на фиг.8 между наконечниками 24a, 24b, как показано, отлично от распределения силовых линий магнитного поля в узком зазоре 25 согласно фиг.7. Силовые линии магнитного поля вдоль широкой области в широком зазоре 25 в основном параллельны, и эта область имеет, по меньшей мере, длину по ширине наконечников 24a, 24b, что в приведенном примере составляет примерно 5 мм. Показано оптическое окно 46 между наконечниками 24a, 24b в зазоре 25, и предпочтительное измерение системы биодатчика выполняют в этой области. На фиг.8 оптическое окно 46 смещается вдоль горизонтальной линии, без ослабления результатов измерений. Это означает, что сенсорная поверхность 31 картриджа 30 также может быть размещена по направлению к краям наконечников 24a, 24b, а не только в центре зазора 25. По этой причине магнитное поле в зазоре 25 становится более однородным по сравнению с фиг.7 из-за структурных изменений наконечников 24a, 24b.
Хотя изобретение было проиллюстрировано и подробно описано в чертежах и вышеприведенном описании, такую иллюстрацию и описание следует рассматривать только как иллюстративное или примерное, но не ограничивающее; таким образом, изобретение не ограничено раскрытыми вариантами воплощения. Изменения к раскрытым вариантам воплощения могут быть поняты и осуществлены специалистами в данной области техники, и они осуществляются согласно заявленному изобретению в результате изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово "содержит" не исключает наличия других элементов или этапов, и единственное число не исключает множественное. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения и в описании (например, функции средства управления, как обсуждалось выше). Сам по себе факт, что некоторые меры перечислены в отличных друг от друга различных зависимых пунктах формулы изобретения, не указывает на то, что нельзя успешно использовать сочетание этих мер. Никакие ссылочные обозначения в формуле изобретения не следует рассматривать как ограничивающие его объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИОСЕНСОР С КВАДРУПОЛЬНОЙ МАГНИТНОЙ СИСТЕМОЙ ВОЗДЕЙСТВИЯ | 2009 |
|
RU2519017C2 |
| РЕЖУЩАЯ ПЛАСТИНА И СВЕРЛИЛЬНЫЙ ИНСТРУМЕНТ | 2015 |
|
RU2709917C2 |
| СИСТЕМА ДЛЯ ИЗГОТОВЛЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ТРЕХ РАЗНЫХ ТИПОВ КУЗОВА АВТОТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ РАБОТЫ | 2009 |
|
RU2489298C2 |
| ЗАЖИМНОЕ УСТРОЙСТВО РУЧНОЙ МАШИНЫ И РУЧНАЯ МАШИНА. | 2011 |
|
RU2588909C2 |
| УСТРОЙСТВО ДЛЯ ОСЛАБЛЕНИЯ ПАДАЮЩЕГО СВЕТА ПУЧКА ИЗЛУЧЕНИЯ | 2015 |
|
RU2651644C1 |
| ДЕФОРМИРОВАННАЯ ПЕТЛЕВАЯ ДИПОЛЬНАЯ АНТЕННА | 2014 |
|
RU2627013C1 |
| КОМБИНИРОВАННАЯ УСТАНОВКА НЕПРЕРЫВНОГО ЛИТЬЯ И ПРОКАТКИ С КАРУСЕЛЬНОЙ МОТАЛКОЙ | 2021 |
|
RU2776937C1 |
| ПЕРЕНОСНАЯ ТЕХНОЛОГИЧЕСКАЯ МАШИНА С ЗАЖИМНЫМ УСТРОЙСТВОМ ДЛЯ ЗАКРЕПЛЕНИЯ РАБОЧЕГО ИНСТРУМЕНТА | 2011 |
|
RU2596541C2 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО С ИЗМЕНЕНИЕМ СОПРОТИВЛЕНИЯ | 2016 |
|
RU2702271C2 |
| ПАНЕЛЬ И ПАНЕЛЬНАЯ СВЯЗКА | 2016 |
|
RU2683970C1 |
Группа изобретений относится к области лабораторной диагностики и может быть использована для определения наличия аналита и его количества в биологических жидкостях. Система биосенсора (1) содержит картридж (30) биосенсора, первый магнитный узел биосенсора (10), содержащий два магнитных субблока (20а, 20b), каждый из которых имеет сердечник (22а, 22b) с верхней поверхностью (24а, 24b), разделенной зазором (25). Сенсорная поверхность (31), образованная картриджем (30) биосенсора, расположена выше верхних поверхностей (24а, 24b) сердечников (22а, 22b). Два субблока (20а, 20b) выполнены для генерирования магнитного поля между первым субблоком (20а) и вторым субблоком (20b) с силовыми линиями магнитного поля, параллельными сенсорной поверхности (31), для приложения сил к магнитным частицам (2) в картридже (30) параллельно к сенсорной поверхности (31). При этом сердечники (22а, 22b) субблоков (20а, 20b) содержат верхние поверхности, сформированные наверху сердечников, которые имеют наклонные секции (26а, 26b). Группа изобретений относится также к способу активации магнитных частиц (2) посредством генерирования магнитного поля в указанной системе биосенсора (1). Группа изобретений позволяет повысить точность и надежность результатов анализа. 2 н. и 10 з.п. ф-лы, 8 ил.
1. Система биосенсора (1), содержащая:
- картридж (30) биосенсора,
- первый магнитный узел биосенсора (10) для генерирования магнитного поля в картридже (30) биосенсора, содержащий два магнитных субблока (20а, 20b), каждый из которых имеет сердечник (22а, 22b) с верхней поверхностью (24а, 24b, 24с, 24d), разделенной зазором (25) и
в которой сенсорная поверхность (31), образованная картриджем (30) биосенсора, расположена выше верхних поверхностей (24а, 24b, 24с, 24d) сердечников (22а, 22b), причем два субблока (20а, 20b) адаптированы для генерирования магнитного поля между первым субблоком (20а) и вторым субблоком (20b) с силовыми линиями магнитного поля, по существу параллельными сенсорной поверхности (31), для приложения сил к магнитным частицам (2) в картридже (30) параллельно к сенсорной поверхности (31) выше верхних поверхностей (24а, 24b, 24с, 24d),
отличающаяся тем, что
сердечники (22а, 22b) субблоков (20а, 20b) содержат верхние поверхности, сформированные наверху сердечников и которые имеют наклонные секции (26а, 26b).
2. Система биосенсора по п.1, которая дополнительно содержит второй магнитный узел (40), установленный выше сенсорной поверхности (31), для воздействия силы на магнитные частицы (2) в картридже (30).
3. Система биосенсора по п.2, где магнитные субблоки (20а, 20b) и второй магнитный узел (40) расположены таким образом, что можно генерировать магнитные силы по направлению к сенсорной поверхности (31) и от сенсорной поверхности (31) путем электрического регулирования средства управления (48).
4. Система биосенсора по п.1, в которой по меньшей мере один из магнитных субблоков (20а, 20b) представляет собой электромагнитный субблок, и напряженность магнитного поля каждого магнитного субблока (20а, 20b) является изменяемой по отдельности путем электрического регулирования средства (48) управления, вследствие чего изменяемым является направление и/или величина магнитных сил.
5. Система биосенсора по п.3, в которой весь анализируемый объем картриджа (30) биосенсора подвергается воздействию магнитного поля, генерируемого субблоками (20а, 20b).
6. Система биосенсора по п.1, в которой упомянутые наклонные участки (26а, 26b) сердечников (22а, 22b) наклонены на 100°-170°, предпочтительно на 120°-150°, по отношению к перпендикуляру к сенсорной поверхности (31) картриджа (30) биосенсора.
7. Система биосенсора по п.1, в которой каждая из верхних поверхностей (24а, 24b, 24с, 24d) имеет плоский участок (28а, 28b), отстоящий на 0,1-5 мм от сенсорной поверхности (31).
8. Способ активации магнитных частиц (2) посредством генерирования магнитного поля и приложения сил к магнитным частицам в системе биосенсора (1) по любому из пп.1-7.
9. Способ по п.8, в котором управляют с помощью магнитного поля движением магнитных частиц (2), присутствующих в первой области (А) картриджа (30) биосенсора, и в котором движение магнитных частиц (2), присутствующих во второй области (В) картриджа (30) биосенсора, в первую область (А) затруднено.
10. Способ по п.8, включающий в себя этап изменения полярности по меньшей мере одного из магнитных субблоков (20а, 20b).
11. Способ по п.8, в котором генерируют посредством первого и/или второго магнитного узлов (10, 40) биосенсора заранее заданный градиент магнитного поля в направлении, параллельном или перпендикулярном сенсорной поверхности (31) в картридже (30) биосенсора.
12. Способ по п.8, в котором два субблока (20а, 20b) адаптированы для генерирования силовых линий магнитного поля, направленных от первого субблока (20а) ко второму субблоку (20b) и от второго субблока (20b) к первому субблоку (20а), соответственно, для смыва несвязанных магнитных частиц (2).
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| WO 00/32293 A1, 08.06.2000 | |||

