Область техники, к которой относится изобретение
Настоящее изобретение имеет отношение к способу управления магнитным полем для приведения в действие импульсным магнитным полем и для обнаружения магнитных или намагничиваемых объектов в биосенсорной системе. Настоящее изобретение также имеет отношение к биосенсорной системе, по меньшей мере, с двумя средствами формирования магнитного поля для импульсного приведения в действие магнитных частиц в биосенсорных системах, управляемого перемещения магнитных или намагничиваемых объектов и обнаружения магнитных или намагничиваемых объектов в картридже биосенсорной системы.
Уровень техники
Известны различные аналитические методы для обнаружения аналита в опытном образце. Например, в иммунохимическом анализе используются механизмы иммунной системы, где антитела и соответствующие антигены способны связываться друг с другом. Этот механизм специфических реакций используется для определения наличия или концентрации антигена в опытном образце. В частности, антитело или антиген (представляющий интерес аналит) метится для количественного определения взаимодействия между антителом и антигеном. Обычно используемые метки представляют собой, например, флуоресцентные и хемилюминесцентные молекулы, окрашенные частицы (бусины) или радиоизотопы.
В последнее время магнитные маркеры используются в иммунохимических анализах для обнаружения наличия или количества аналита. Использование магнитных маркеров в качестве, например, магнитных частиц (сфер) имеет несколько преимуществ. Магнитные частицы могут приводиться в действие посредством применения магнитного поля таким образом, чтобы аналитическая процедура могла быть ускорена. Кроме того, в биологическом опытном образце отсутствуют фоновые магнитные сигналы, оказывающие влияние на обнаружение магнитных частиц.
Однако в данных иммунохимических анализах с использованием магнитных маркеров требуется средство (a) приведения в действие магнитных частиц, связанных с антигенами, для того чтобы они были иммобилизованы около поверхности картриджа сенсора, и (b) промывания оставшихся несвязанных магнитных частиц для того, чтобы не оказывать влияния на измерение количества связанных частиц.
Таким образом, например, два магнита могут быть расположены на противоположных сторонах картриджа сенсора, причем первый магнит притягивает магнитные частицы для перемещения их через опытный образец по направлению к поверхности сенсора, а затем второй магнит притягивает несвязанные магнитные частицы для перемещения от поверхности сенсора. В данной конфигурации эти два магнита монтируются на несущей структуре, а несущая структура механически перемещает магниты по направлению к поверхности сенсора или от нее (см. R.Luxton с соавторами. Использование внешних магнитных полей для сокращения времени реакции в иммунохимическом анализе... Аналитическая химия, 2004, 76, 1715-1719).
Такой способ является весьма утомительным и требующим больших затрат времени и нуждается в сложной поддерживающей системе для расположения этих двух магнитов на противоположных сторонах картриджа сенсора. Другой, более эффективный способ приведения в действие магнитных частиц состоит в использовании импульсного приведения в действие с помощью множества магнитов, расположенных вокруг картриджа сенсора. Таким образом, частицы могут неоднократно приводиться в соприкосновение с поверхностью сенсора, где может быть образована биологическая связь. Перемещение от поверхности сенсора зачастую называется «этапом промывания». При приведении в действие частиц связанные частицы, как правило, постоянно подвергаются воздействию со стороны сил магнитного поля, но также могут подвергаться воздействию и со стороны механических сил, если другие (несвязанные) частицы приходят в соприкосновение со связанными частицами. Если эти силы являются слишком значительными и одна связь разрывается, то сигнал теряется, а чувствительность анализа уменьшается. Другими словами, в биосенсорах, использующих приведенные в действие магнитные частицы, связи, сохраняющие частицу связанной с поверхностью сенсора, могут быть снова разрушены в результате слишком резкого приведения в действие.
Кроме того, после этапа приведения в действие или этапа связывания обычно включается этап магнитного промывания для удаления несвязанных частиц с поверхности сенсора. Тогда обнаруживаются связанные частицы с использованием технических средств, являющихся чувствительными исключительно к частицам, находящимся близко к поверхности (в области обнаружения). Однако было отмечено, что зачастую после такого этапа промывания не наблюдается устойчивого конечного сигнала.
Изобретатели настоящего изобретения изучили и обнаружили механизмы, вызывающие такую уменьшенную чувствительность анализа и неустойчивого сигнала после этапа промывания. Более подробно это будет обсуждаться в последующих возможных механизмах.
При обычном биологическом анализе может существовать несколько связей, которые удерживают частицу связанной с поверхностью сенсора, показанной для иммунохимического сэндвич-анализа на Фигуре 1. В частности, магнитная частица E связывается c поверхностью сенсора через первичное антитело B, аналит или целевую молекулу C и вторичное антитело D. Связи между различными частями обозначаются цифрами, а именно связь между поверхностью A сенсора и первичным антителом B маркируется как 1; связь между первичным антителом B и целевой молекулой C маркируется как 2; связь между целевой молекулой C и вторичным антителом D маркируется как 3, а связь между вторичным антителом D и частицей E маркируется как 4.
Магнитная частица E приводится в действие по направлению к поверхности сенсора посредством внешней силы действия магнитного поля. Для того чтобы связать частицу E с поверхностью A сенсора, необходимо множество связей. Однако во время приведения в действие силы, оказывающие воздействие на частицы, могут быть слишком значительными для удержания частиц связанными с поверхностью, что, в конечном итоге, приводит к уменьшению сигнала. В особенности нековалентные связи являются восприимчивыми к разрушению, если на частицу оказывается воздействие достаточной силы. Было обнаружено, что разрушение связи(ей) зачастую является необратимым, что приводит к уменьшению функциональных возможностей частицы или поверхности сенсора, что, в конечном счете, приводит к уменьшенной чувствительности анализа. Исследования AFM (атомно-силовой микроскопии) поврежденных областей показывают, что даже первичное антитело B может быть удалено во время приведения в действие. Следовательно, данная проблема возникает, в частности, в анализах, в которых биологическая молекула связывается с поверхностью сенсора посредством относительно слабых взаимодействий аналогично с антителом, подвергающимся физической адсорбции на пластмассовой (например, пенопластовой) поверхности.
Кроме того, степень потери сигнала вследствие данного явления зависит от количества уже связанных частиц. В частности, частицы, которые 'защищены' посредством наличия соседних связанных частиц, более трудно удалить.
Кроме того, изобретатели настоящего изобретения отмечают, что сигнал во время или после этапа магнитного промывания зачастую не является очень устойчивым. Такой неустойчивый сигнал вводит дополнительную ошибку в величину обнаруженного аналита, дополнительно сокращая точность и чувствительность анализа.
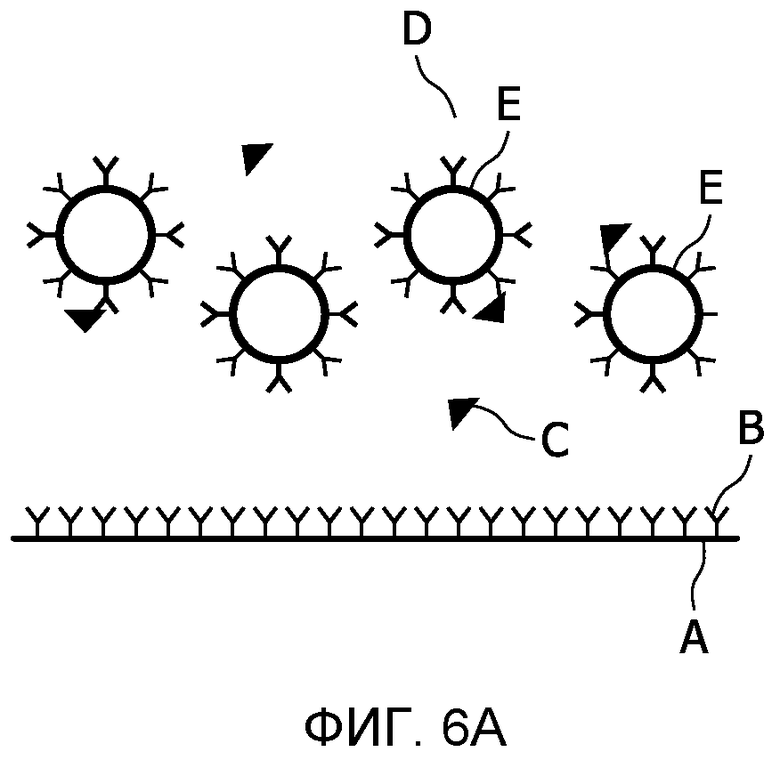
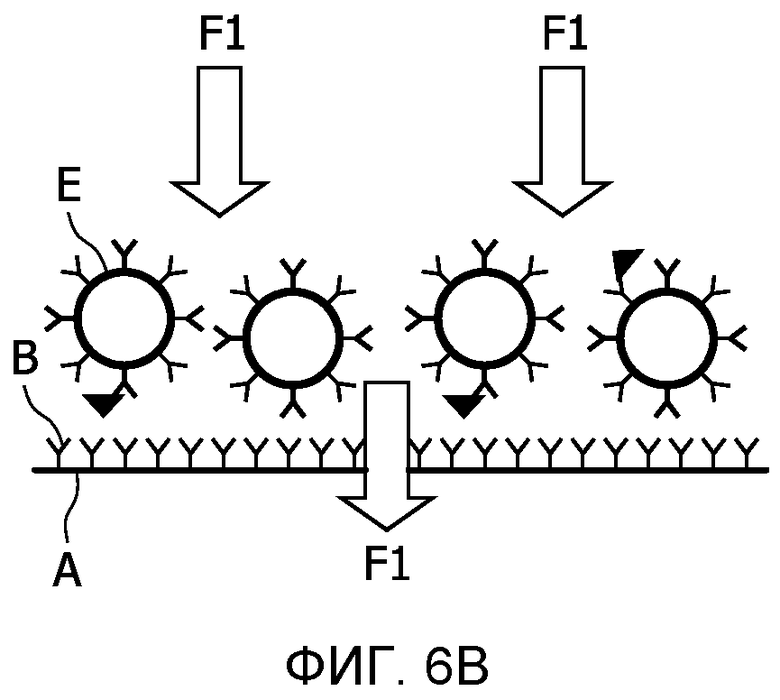
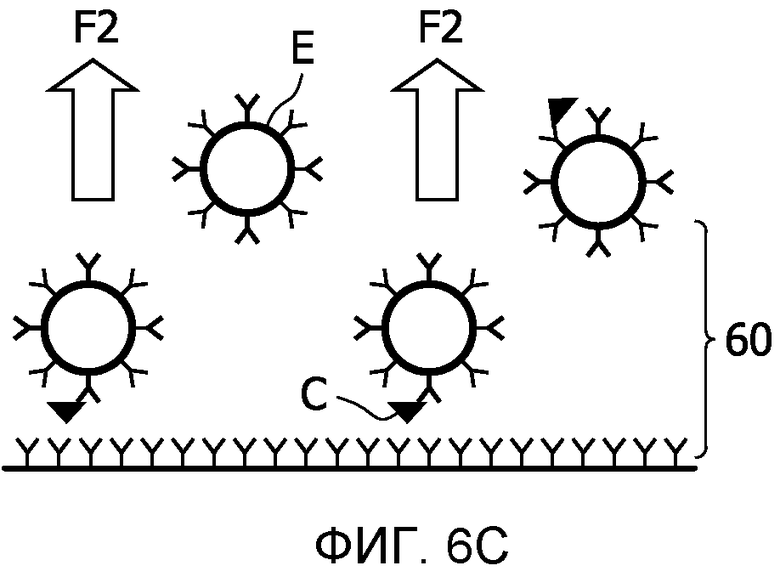
Фигуры 6A и 6C изображают различные этапы обычного анализа в биодатчике. В частности, Фигура 6A изображает магнитные частицы E, которые могут связываться с аналитом или целевой молекулой C в растворе. Для того чтобы связать частицы E со связанными целевыми молекулами C на поверхности A сенсора, магнитное поле применяется таким образом, чтобы частицы E мигрировали к поверхности сенсора (см. Фиг. 6B). Сила F1 магнитного поля, которое действует на частицы E, обозначается посредством двойных стрелок на Фигуре 6B. Несвязанные частицы магнитным способом удаляются от поверхности сенсора в последующем этапе промывания (см. Фиг. 6C). При этом сила F2 магнитного поля, которая действует на частицы E, также обозначена на Фигуре 6C посредством двойных стрелок. На последующем этапе связанные частицы обнаруживаются с использованием технических средств, чувствительных исключительно к частицам, которые находятся близко к поверхности A сенсора.
Изобретатели настоящего изобретения обнаружили, что неустойчивость сигнала после этапа промывания (см. Фиг. 6B) вызывается, по существу, посредством оседания несвязанных частиц, в особенности, если используются относительно большие частицы (например, в данных биосенсорах часто используются частицы с диаметром 500 нанометров). Данный механизм будет разъясняться со ссылкой на Фигуры 7A, 7B и 8.
Фигура 7A похожа на Фигуру 6C, которая иллюстрирует этап промывания. Если магнитное поле из этапа промывания выключается для обнаружения связанных частиц, то оседающие частицы могут повторно вводиться в область 60 обнаружения, находящуюся близко к поверхности, как иллюстрировано на Фигуре 7B. В частности, сила гравитации, вызывающая миграцию частиц вниз на поверхность A сенсора, обозначается посредством одиночных стрелок FG.
Фигура 8 изображает изменение сигнала в трех режимах: (I) магнитное притяжение, то есть этап приведения в действие; (II) магнитное удаление, то есть этап промывания; и (III) после выключения магнитного поля этапа промывания, то есть этап обнаружения. Как может быть ясно замечено в режиме III из Фигуры 8, дополнительно обнаруживаются осажденные частицы, повторно входящие в область 60 обнаружения, что приводит к увеличению сигнала. Вместо улавливания сигнала после этапа промывания сигнал может улавливаться непосредственно во время этапа магнитного промывания (см. режим II из Фиг.8). Однако, как может быть замечено, данный сигнал также является неустойчивым, поскольку несвязанные частицы постоянно удаляются из области 60 обнаружения. Кроме того, силы, применяемые во время этапа промывания, также действуют на связанные частицы и могут перемещать частицу дальше от поверхности или даже разрушать биологическую связь, что приводит к уменьшению сигнала. В особенности в анализе, в котором получается очень низкий сигнал, близкий к аппаратному шуму, отношение сигнал к шуму (S/N) должно быть улучшено посредством усреднения сигнала в пределах более длинного промежутка времени. Тогда является важным, чтобы с течением времени сигнал был устойчивым. В особенности для этих анализов неустойчивый сигнал уменьшает чувствительность анализа.
Сущность изобретения
Следовательно, существует потребность в предоставлении системы и способа, при которых не допускается рассматриваемого выше уменьшения чувствительности. В частности, существует потребность в системе и способе, при которых минимизируются рассматриваемые выше нежелательное удаление или накопление частиц на поверхности сенсора. В частности, не следует допускать повреждений поверхности в очень чувствительных анализах, в которых с поверхностью сенсора будет связываться исключительно малое количество частиц, а для обнаружения требуется стабильный сигнал, подаваемый в строго определенные моменты времени.
Конкретные и предпочтительные аспекты изобретения излагаются в сопутствующих независимых и зависимых пунктах формулы изобретения. Отличительные признаки из зависимых пунктов формулы изобретения могут быть объединены с отличительными признаками независимых пунктов формулы изобретения и с отличительными признаками других зависимых пунктов формулы изобретения в случае необходимости, а не только так, как явно изложено в формуле изобретения.
Решение определенной выше проблемы достигается посредством приведения в действие и промывания частиц способом, в котором не допускается любого нежелательного перемещения частиц в области обнаружения рядом с поверхностью сенсора. В частности, параллельное перемещение частиц в области обнаружения рядом с поверхностью сенсора минимизируется или не допускается таким образом, чтобы уже связанные частицы или связанные с поверхностью сенсора антитела не удалялись.
Применительно к данному изобретению и, в частности, к формуле изобретения отмечается, что термины «магнитный объект» или «намагничиваемый объект» имеют отношение к любому типу объектов, как частица, частицы, сферы и/или микрочастицы, в частности микросферы, наночастицы или молекулы, в частности биомолекулы, белки и другие биополимеры, а также биологические клетки или субклеточные фрагменты, вирусные частицы или вирусы и органеллы клеток и т.п. или неорганические составы, которые являются как магнитными, так и/или намагничиваемыми или связанными с магнитной и/или намагничиваемой частицей. Кроме того, применительно к изобретению термин средство формирования магнитного поля имеет отношение к любому такому средству формирования магнитных полей, как «электромагнит», «магнитная катушка» или «электромагнитное устройство» и т.д. Термины «представляющая интерес область» или «область обнаружения» сенсора имеют отношение, применительно к изобретению, к местоположению рядом с поверхностью сенсора, где обнаруживаются частицы во время этапа обнаружения.
В соответствии с первым аспектом настоящее изобретение имеет отношение к способу управления перемещением магнитных или намагничиваемых объектов в картридже биосенсора. Способ содержит следующие этапы. Предоставляется картридж биосенсора с проходящей в боковом направлении поверхностью сенсора и, по меньшей мере, средством формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным или, по существу, перпендикулярным к поверхности сенсора. Средство формирования магнитного поля, предпочтительно, попеременно приводится в действие таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты перпендикулярно или, по существу, перпендикулярно к поверхности сенсора по направлению от поверхности сенсора и к ней. Длины импульсов и силы магнитного поля во время попеременного приведения в действие и промывания предпочтительно подбираются таким образом, чтобы, по существу, не допускалось бокового перемещения намагничиваемых объектов вдоль тянущейся в боковом направлении поверхности сенсора.
В соответствии с дополнительным аспектом изобретения длина импульса и сила магнитного поля во время обнаружения частиц в области обнаружения предпочтительно подбираются таким образом, чтобы концентрация частиц в области обнаружения, предпочтительно, являлась постоянной, то есть может не допускаться существенного истощения накопления частиц в области обнаружения рядом с поверхностью сенсора посредством настройки магнитного поля таким образом, чтобы не допускалось никакого перемещения частиц в области обнаружения. Такое настроенное магнитное поле, предпочтительно, предоставляется в импульсе обнаружения, предпочтительно, после приведения в действие и этапа промывания.
Другими словами, способ в соответствии с настоящим изобретением, предпочтительно, содержит этап подбора магнитного поля для определенной продолжительности времени таким образом, чтобы абсолютное значение силы, действующей на магнитный или намагничиваемый объект в противоположном направлению силы гравитации направлении, было больше или равно абсолютному значению силы гравитации. Опять же, другими словами, результирующая сила магнитного поля, действующая в противоположном силе гравитации направлении, подбираются таким образом, чтобы магнитные или намагничиваемые объекты оставались, по существу, неподвижными в пределах раствора.
Средство формирования магнитного поля или электромагниты, предпочтительно располагаются либо исключительно на одной стороне проходящей в боковом направлении поверхности сенсора, либо, по существу, на противоположных сторонах проходящей в боковом направлении поверхности сенсора биосенсора. Кроме того, является предпочтительным, чтобы электромагниты создавали градиент магнитного поля перпендикулярный или, по существу, перпендикулярный к поверхности сенсора. Сформированное магнитное поле, предпочтительно, является негомогенным в перпендикулярном или, по существу, перпендикулярном к поверхности сенсора направлении. В частности, магнитное поле, предпочтительно, создается таким образом, чтобы не допускалось индуцированных боковых сил вдоль (параллельно) поверхности сенсора. Другими словами, электромагнит(ы) предпочтительно выполняются, располагаются и приводятся в действие таким образом, чтобы около поверхности биосенсора боковые компоненты градиента магнитного поля минимизировались или не возникали.
Однако в случае если создается очень малый боковой градиент магнитного поля, то будет вызвано перемещение или сбор частиц также и в боковом направлении. Такие минимальные боковые градиенты могут быть вызваны вследствие перемещения оси магнитных катушек, или даже некоторые магнитные сферы могут вводить локальные градиенты магнитного поля, параллельные поверхности сенсора. Однако наиболее частой причиной бокового компонента являются ограниченные геометрические размеры магнитов. Поскольку размеры магнита более или менее сопоставимы с размером с представляющей интерес областью на поверхности биосенсора, поле является неоднородным. Другими словами, сферы притягиваются к центру магнита. В такой точке будет создаваться некоторый боковой компонент, который является очень малым, то есть даже если вызванное перемещение является, по существу, перпендикулярным направлению к поверхности сенсора и от нее, то (малые) боковые градиенты магнитного поля приводят к диагональному перемещению частиц (суммирование бокового и перпендикулярного вектора силы).
Изобретатели настоящего изобретения обнаружили, что попеременное приведение в действие магнитных катушек не допускает повреждения поверхности, несмотря на то что малые и/или случайно созданные боковые силы магнитного поля могут вызывать боковое перемещение частиц. Следовательно, в соответствии с настоящим изобретением средство формирования магнитного поля (например, электромагниты) попеременно приводится в действие таким образом, чтобы, по существу, не допускалось повреждения поверхности сенсора, несмотря на то что могут иметься в наличии (малые) боковые градиенты магнитного поля.
Средство формирования магнитного поля в соответствии с настоящим изобретением может являться, по меньшей мере, одним электромагнитом, предпочтительно с магнитными катушками. Предпочтительно, по меньшей мере, один, но более предпочтительно, два или более электромагнитов могут быть расположены под поверхностью сенсора. В дополнение, по меньшей мере, к одному электромагниту под поверхностью сенсора может существовать, по меньшей мере, один электромагнит, расположенный над поверхностью сенсора. Предпочтительно, каждый электромагнит управляется отдельно посредством средства привода.
Предпочтительно, два электромагнита могут располагаться под поверхностью сенсора с прорезью между этими двумя электромагнитами. Одиночный электромагнит, предпочтительно, располагается с отличной от поверхности сенсора стороны, находящейся напротив вышеупомянутой прорези. Предпочтительно, два электромагнита под поверхностью сенсора могут содержать одну и ту же полярность (север-север или юг-юг) при одновременном приведении в действие для направления частиц от поверхности сенсора. Эти, по меньшей мере, два электромагнита, предпочтительно, содержат противоположные полярности (север-юг и юг-север) при одновременном приведении в действие для индуцирования перемещения частиц к поверхности сенсора, то есть для притягивания частиц на поверхность сенсора.
С другой стороны, предпочтительно, один электромагнит над поверхностью предпочтительно приводится в действие для индуцирования перемещения частиц от поверхности. Перемещение от поверхности зачастую называется «этапом промывания». В частности, обычный этап промывания на основе потока жидкости по поверхности сенсора может заменяться посредством этапа магнитного промывания, в котором несвязанные частицы могут вытягиваться с поверхности магнитным полем.
Дополнительно будет определено чередующееся или периодическое приведение в действие электромагнитов, в котором является достаточным обращение исключительно к одиночному периоду цикла приведения в действие (см., например, Фиг. 4). Предпочтительно, период попеременного приведения в действие содержит первую длину импульса для направления магнитного или намагничиваемого объекта к поверхности сенсора. На последующем этапе может быть сформирована вторая длина импульса для направления магнитного или намагничиваемого объекта от поверхности сенсора. В соответствии с предпочтительным вариантом осуществления настоящего изобретения между первой длиной импульса и второй длиной импульса существует временной интервал, на котором, по существу, не формируется никакое магнитное поле. Другими словами, после первой и/или второй длины магнитного импульса может иметься короткое «время между циклами». Предпочтительно «время между циклами» подбирается для заданных требований системы. В частности, время между циклами подбирается таким образом, чтобы оно соответствовало времени рассеивания или оседания, необходимому для достижения частицей поверхности. Другими словами, за импульсом для направления частицы к поверхности сенсора, предпочтительно, следует короткое «время между циклами», адаптированное для заданной ситуации, то есть покрываемого расстояния и размеров используемых частиц.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения этап направления частицы от поверхности сенсора (например, приведенного в действие верхнего магнита) не может выполняться непосредственно после приведенного в действие магнитного поля для направления частиц к поверхности сенсора (например, приведенного в действие нижнего магнита). В частности, является предпочтительным, чтобы все электромагниты выключались после включения нижних магнитов. Таким образом, может существовать временной интервал между приведением в действие нижних электромагнитов и приведением в действием верхнего магнита без сформированного магнитного поля.
Данный временной интервал предоставляет такое преимущество, что позволяется рассеивание или осаждение частиц на поверхности сенсора.
В соответствии с дальнейшим предпочтительным вариантом осуществления настоящего изобретения сформированное магнитное поле после этапа промывания подбирается таким образом, чтобы не допускалось изменения концентрации частиц в области обнаружения рядом с поверхностью сенсора. В частности, магнитное поле, предпочтительно, подбирается таким образом, чтобы частицы удерживались в состоянии равновесия, например, чтобы сила гравитации, тянущая частицы к поверхности сенсора, по существу компенсировалась или компенсировалась посредством магнитного поля, действующего, по существу, в противоположном силе гравитации направлении, таким образом, чтобы расстояние от каждой частицы до поверхности сенсора удерживалось, по существу, постоянным.
Другими словами, способ в соответствии с настоящим изобретением может содержать импульс обнаружения, во время которого магнитное поле подбирается таким образом, чтобы абсолютное значение силы, действующей на магнитный или намагничиваемый объект в противоположном от силы гравитации направлении, было больше или равно абсолютному значению силы гравитации. Опять же, другими словами, магнитное поле подбирается таким образом, чтобы не допускалось перемещения магнитных или намагничиваемых объектов к поверхности сенсора. В соответствии с предпочтительным вариантом осуществления не допускается перемещения магнитных или намагничиваемых объектов по направлению к поверхности сенсора и от нее.
В частности, максимум электрического тока, используемого для формирования магнитного поля, предпочтительно, выбирается таким образом, чтобы сила гравитации, действующая на частицы, могла быть лишь преодолена. Таким образом, по существу, не будет наблюдаться никакого оседания частиц. Кроме того, сила, действующая на частицы, будет минимальной, так что не будет разрушено никаких заданных связей поверхности сенсора. Такая настройка магнитного поля, предпочтительно, применяется во время этапа определения сигнала или измерения. В результате сигнал будет очень устойчивым и затем может быть усреднен на достаточном отрезке времени для повышения отношения S/N. Кроме того, поскольку сигнал собирается на четко определенном отдельном этапе, обработка сигнала становится очень эффективной.
Частота попеременной модуляции, предпочтительно, равна более 1 Гц и, предпочтительно, ниже 10 Гц, более предпочтительно более 2 Гц и ниже 6 Гц, и более предпочтительно, между 3 и 5 Гц и еще более предпочтительно, приблизительно 4 Гц. Однако в зависимости от размера частиц и сопротивления потока частиц в пределах раствора конкретная конфигурация магнитов и/или конкретная концентрация частиц и т.д., частота попеременной модуляции может отличаться от предложенных выше диапазонов. Напряжение, подаваемое на магнитные катушки, может содержать сигналы прямоугольной формы или сигналы трапецеидальной формы.
Например, при использовании вышеупомянутых частот временной интервал между первой длиной импульса и второй длиной импульса может составлять более 30% периода, предпочтительно, более 40% и, еще более предпочтительно, 50%. При частоте 4 Гц 50% времени составляет 125 миллисекунд, что является предпочтительным для конфигурации магнита/биосенсора, как описано и изображено в подробном описании со сферами в 500 нанометров.
Первая длина импульса с первой силой сформированного магнитного поля и вторая длина импульса со второй силой сформированного магнитного поля могут дополнительно подбираться таким образом, чтобы магнитные или намагничиваемые объекты направлялись приблизительно на одно и то же расстояние, во время фазы перемещения от поверхности сенсора и к поверхности сенсора. Первая и/или вторая длина импульса может составлять, по меньшей мере, 5% периода, предпочтительно, по меньшей мере, 20%, более предпочтительно, приблизительно 25% и, предпочтительно, менее 40%.
Другими словами, рабочий цикл (длина импульса или временной интервал приведенного в действие электромагнита в пределах периода) для направления магнитных или намагничиваемых объектов от поверхности сенсора составляет, предпочтительно, от 10 до 40% и, более предпочтительно, приблизительно 25% всего периода. Однако как будет учитываться специалистами в данной области техники, данная предпочтительная длина импульса зависит от конкретной конфигурации магнитов, конкретного размера частицы, конкретной концентрации частиц, и т.д. Кроме того, является предпочтительным, чтобы одиночный период включал в себя исключительно один рабочий цикл для направления магнитного или намагничиваемого объекта от поверхности сенсора. Кроме того, является предпочтительным, чтобы одиночный период (также называемый в дальнейшем первой длиной импульса) содержал исключительно один рабочий цикл для направления магнитных или намагничиваемых объектов к поверхности сенсора. Кроме того, является предпочтительным, чтобы одиночный период содержал исключительно один рабочий цикл (также в дальнейшем называемый второй длиной) для направления магнитных или намагничиваемых объектов от поверхности сенсора. При этом, кроме того, является предпочтительным, чтобы существовал временной интервал во время периода, на котором не приводится в действие ни один из электромагнитов. В частности, является предпочтительным, чтобы такой временной интервал, а именно «время между циклами», находился после первой длины импульса и перед второй длиной импульса.
В соответствии со способом настоящего изобретения любые магнитные или намагничиваемые объекты, расположенные на или возле поверхности сенсора, предпочтительно перемещаются, прежде всего, на предварительно определенное расстояние от поверхности, а затем перемещаются, по существу, на меньшее или такое же предварительно определенное расстояние к поверхности во время периода попеременного приведения в действие.
Соответственно, рабочий цикл для направления магнитных или намагничиваемых объектов к поверхности сенсора также составляет предпочтительно от 10 до 40% и, более предпочтительно, приблизительно 25% всего периода. Кроме того, является предпочтительным, чтобы период содержал исключительно один рабочий цикл для направления магнитных или намагничиваемых объектов к поверхности сенсора. Длительность рабочего цикла (длина импульса) для индуцирования перемещения по направлению от и к поверхности может быть равной. Однако поскольку расстояние, на которое мигрируют частицы, зависит от длины импульса и амплитуды импульса, может выбираться более короткая длина импульса посредством более высоких амплитуд и наоборот.
Настоящее изобретение также имеет отношение к биосенсорной системе для проведения вышеупомянутых предпочтительных этапов способа. Биосенсорная система, предпочтительно, содержит съемно или фиксированно закрепленный картридж биосенсора с проходящей в боковом направлении поверхностью сенсора и, по меньшей мере, средством формирования магнитного поля для формирования магнитного поля с градиентом поля, по существу, перпендикулярным к поверхности сенсора. Кроме того, система может содержать блок привода для попеременного приведения в действие средства формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты перпендикулярно или, по существу, перпендикулярно к поверхности сенсора по направлению от поверхности сенсора и к ней. Блок привода, предпочтительно, выполнен с возможностью формирования длины импульса попеременного приведения в действие, при котором не допускается бокового перемещения намагничиваемых объектов вдоль поверхности сенсора.
В частности, блок привода, предпочтительно, выполнен с возможностью одновременного приведения в действие, по меньшей мере, двух электромагнитов, располагаемых под поверхностью сенсора, с противоположными полярностями для направления намагничиваемых объектов к поверхности сенсора и/или для одновременного приведения в действие упомянутых, по меньшей мере, двух электромагнитов с одинаковой полярностью для направления намагничиваемых объектов от поверхности сенсора. Созданное, предпочтительно, негомогенное магнитное поле с большим перпендикулярным и минимизированным, но, возможно, малым или очень малым параллельным градиентом является причиной того, что любой(ая) магнитный(ая) или намагничиваемый(ая) объект/частица, расположенный(ая) возле поверхности сенсора, перемещается, по существу, в направлении, перпендикулярном к поверхности сенсора, тогда как перемещение, параллельное поверхности сенсора, минимизируется или не допускается.
Система по настоящему изобретению, в частности блок привода, предпочтительно, выполнена с возможностью управления перемещением магнитных или намагничиваемых частиц/объектов (и, следовательно, приведения в действие) в картридже биосенсора. Блок привода, предпочтительно, выполнен с возможностью попеременного приведения в действие электромагнитов (переменного включения и/или выключения) таким образом, чтобы индуцированное направление перемещения любого(ой) магнитного(ой) или намагничиваемого(ой) объекта/частицы, предпочтительно расположенного(ой) возле поверхности сенсора, содержит главным образом компонент, перпендикулярный к проходящей в боковом направлении поверхности сенсора, если объекты направляются по направлению от поверхности сенсора и/или к ней. Другими словами, является предпочтительным, чтобы одновременно с перемещением частицы по направлению от поверхности или к ней не допускалось или минимизировалось боковое перемещение вследствие возможно сформированного бокового компонента поля. Вектор скорости магнитного(ой) или намагничиваемого(ой) объекта/частицы предпочтительно строится посредством компонентов параллельных (боковых) и перпендикулярных к поверхности сенсора, если частицы направляются к поверхности сенсора или от нее, причем перпендикулярный компонент, по существу, больше бокового компонента. Предпочтительно, боковой компонент равен нулю. Таким образом, частицы могут неоднократно приводиться в соприкосновение с поверхностью сенсора, где биологическая связь может быть сформирована без удаления уже связанных частиц с поверхности.
Предпочтительно, чтобы электромагнит(ы) над поверхностью сенсора выключался(ись), если электромагнит(ы) под поверхностью приводится(ятся) в действие и наоборот. Другими словами, является предпочтительным, чтобы приведение в действие верхней и нижней катушек магнита модулировалось попеременно. Однако в соответствии с дополнительным аспектом изобретения отдельные фазы приведения в действие отдельных магнитов могут накладываться. В частности, одновременно с приведением в действие нижних магнитных катушек поле верхней катушки может быть сокращено вместо полного выключения и наоборот.
Согласно дополнительному предпочтительному варианту осуществления в соответствии с настоящим изобретением блок привода выполнен с возможностью формирования силы магнитного поля и/или длительности магнитных полей таким образом, чтобы магнитные или намагничиваемые объекты мигрировали приблизительно на одно и то же расстояние во время двух фаз перемещений от поверхности сенсора и к поверхности сенсора. Например, частица, расположенная возле или около поверхности сенсора (но, предпочтительно, не связанная с поверхностью) направляется от поверхности сенсора на предварительно определенное расстояние, например, вследствие поля, созданного посредством верхнего электромагнита. Другими словами, несвязанные частицы удаляются от поверхности сенсора посредством этапа магнитного промывания. Это предварительно определенное расстояние может управляться посредством силы сформированного поля, например напряжением, применяемым к катушкам электромагнита, и/или длиной импульса (продолжительностью) сформированного магнитного поля. Вектор скорости направленной в противоположном направлении частицы, предпочтительно, содержит компоненты, перпендикулярные и, дополнительно, параллельные поверхности сенсора. Для направления той же самой частицы обратно к поверхности (например, для связывания), магнитное поле, в частности сила поля и длина импульса (продолжительность), предпочтительно, формируется таким образом, чтобы частица мигрировала на такую же величину расстояния в обратном направлении. В частности, является предпочтительным, чтобы расстояние миграции, перпендикулярной к поверхности сенсора во время индуцированного перемещения от него, по существу, было таким же, как и расстояние миграции, перпендикулярной к поверхности сенсора во время индуцированного перемещения к поверхности сенсора. Другими словами, может являться возможным, чтобы расстояние миграции, направленной вдоль поверхности сенсора, различалось во время индуцированных перемещений частицы по направлению от поверхности сенсора и к ней.
Эти и другие аспекты изобретения будут очевидны и объяснены со ссылкой на описанные далее варианты осуществления.
Краткое описание чертежей
Фиг. 1 схематично показывает множество связей, образуемых при обычном иммунохимическом сэндвич-анализе;
Фиг. 2 схематично иллюстрирует боковые силы, которые могут применяться к связанной частице во время приведения в действие;
Фиг. 3А и 3B схематично показывают устройство биосенсорной системы в соответствии с настоящим изобретением с одной магнитной катушкой над картриджем биосенсора и с двумя магнитными катушками под картриджем биосенсора;
Фиг. 4. показывает напряжения приведения в действие в зависимости от времени для управления тремя магнитными катушками из варианта осуществления, показанного на Фиг. 3A и 3B;
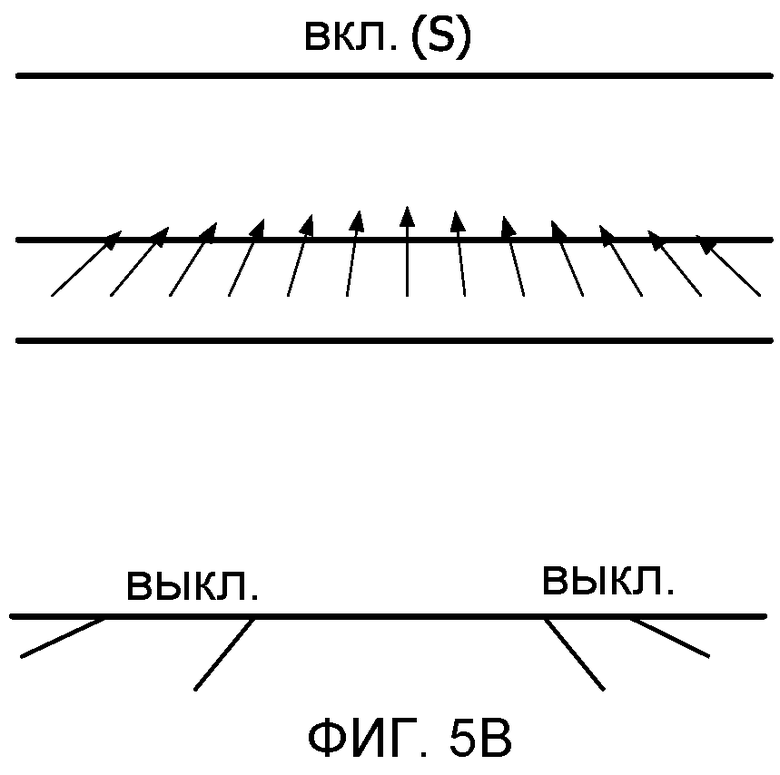
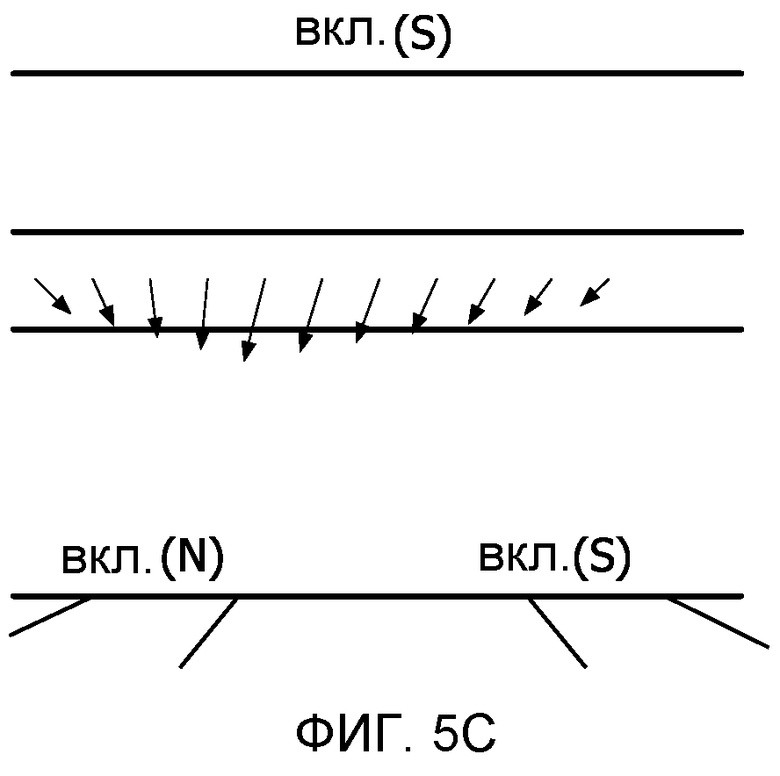
Фиг. 5A-5C показывают моделирования магнитных полей в различных положениях приведения в действие.
Фиг. 6A схематично показывает иммунохимический анализ в растворе;
Фиг. 6B схематично показывает иммунохимический анализ из Фиг. 3А во время этапа приведения в действие;
Фиг. 6C схематично показывает иммунохимический анализ из Фиг. 3А во время этапа промывания;
Фиг. 7A и 7B схематично показывает иммунохимический анализ во время этапов промывания и оседания соответственно;
Фиг. 8 показывает диаграмму с изменением сигнала во время этапов активации и промывания в обычной системе и
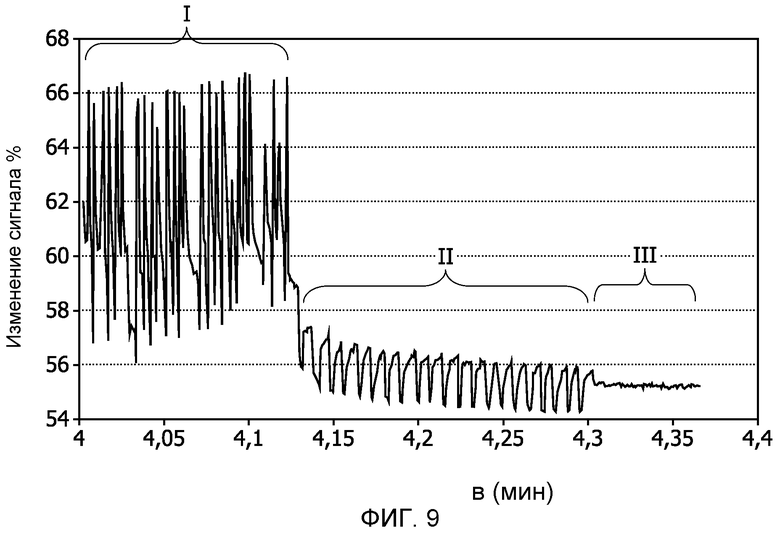
Фиг. 9 показывает диаграмму с изменением сигнала во время этапов активации, промывания и обнаружения в способе в соответствии с настоящим изобретением.
Подробное описание вариантов осуществления
Изобретатели настоящего изобретения определили наличие боковых сил (параллельных поверхности сенсора), действующих на частицы, находящиеся рядом с поверхностью сенсора, как один из главных благоприятствующих факторов вышеописанной проблемы. По сравнению с силами, перпендикулярными к поверхности сенсора, эти боковые силы, вероятно, могут индуцировать намного большие силы биологических связей вследствие созданного большого вращающего момента.
В частности, Фиг. 2 иллюстрирует, как относительно маленькая сила F, параллельная поверхности сенсора (боковая), может индуцировать относительно большую силу биологической связи вследствие длинного плеча «d», созданного посредством относительно больших размеров магнитной частицы 10. Результирующая сила, действующая на связь между частицей и на связь, обозначенную посредством F', значительно больше параллельной силы F. Кроме того, изобретатели настоящего изобретения также заметили, что одиночные несвязанные частицы можно тянуть по поверхности сенсора и они могут удалять уже связанные частицы на их пути. Решение этой проблемы состоит в приведении в действие частиц способом, в котором боковое перемещение частиц рядом с поверхностью минимизируется или не допускается.
Фиг. 3А и 3B показывают конкретную конфигурацию в соответствии с настоящим изобретением с внешними магнитами или магнитными катушками, а именно с нижним и верхним магнитами, расположенными, по существу, на противоположных сторонах нижней и верхней поверхностей сенсора соответственно, используемым для приведения в действие. В частности, две магнитные катушки 30, 30' (нижние магниты) располагаются под поверхностью «A» сенсора. Картридж биосенсора с проходящей в боковом направлении поверхностью A сенсора располагается между магнитными катушками (изображенными лишь частично). В частности, картридж сенсора, предпочтительно, заполняется жидкостью, которая содержит магнитные или намагничиваемые частицы 10, например, парамагнитные частицы 10, которые могут быть связаны посредством одной или множества связей (см. Фиг. 1) с поверхностью сенсора A. Для увеличения приведения в действие частиц приводящие в действие магнитные катушки 30, 30' располагаются под поверхностью сенсора для формирования магнитного поля для вытягивания частицы 1 к поверхности A сенсора. Как показано на Фиг. 3B, может использоваться пара катушек 30, 30'. Однако равновозможно использование исключительно одной магнитной катушки под поверхностью A сенсора. После предварительно определенного времени нижние катушки 30, 30' выключаются таким образом, чтобы в картридже не имелось никакого магнитного поля.
Другое магнитное поле, сформированное посредством магнитной катушки 20, расположенной над поверхностью сенсора A, может применяться для вытягивания несвязанных частиц с поверхности A сенсора (Фиг. 4A). Как может быть замечено на Фиг. 4, верхняя магнитная катушка 20 не приводится в действие немедленно после выключения нижних катушек. Является предпочтительным, чтобы временной интервал без сформированного магнитного поля предоставлялся перед приведением в действие верхней магнитной катушки 20. Более подробно, предпочтительным является короткое «время между циклами» магнита непосредственно после притягивающего импульса, достаточно долгое для того, чтобы позволить частицам рассеяться на поверхности сенсора, где может быть сформирована связь.
После того как частицы снова направляются от поверхности сенсора посредством верхней катушки 2, верхняя катушка 2 затем выключается, а нижние катушки (30, 30') снова включаются (см. Фиг. 4B), и так далее.
Эти направленные по направлению к поверхности A и от нее перемещения индуцируются градиентами магнитного поля, которые направлены, по существу, перпендикулярно к поверхности A. Однако малые или очень малые градиенты магнитного поля, параллельные поверхности, могут создаваться вследствие размеров или расположения магнитов. Как обсуждалось выше относительно Фиг. 3, даже очень малые боковые силы могут удалять уже связанные частицы. Для того чтобы не допустить удаления уже связанных частиц и/или повреждения поверхности сенсора, магниты под и над поверхностью сенсора приводятся в действие попеременно, как описывается более подробно в связи со схемой приведения в действие на Фиг. 4.
В частности, Фигуры 5A, 5B и 5C показывают моделирование магнитных полей при различных положениях магнитов. Сила (длина стрелки) и направление силы действия магнитного поля, действующей на частицы, обозначаются стрелками. Однако следует отметить, что для трех различных состояний используются различные масштабы. Фиг. 5A показывает силы в случае, если оба нижних магнита 30, 30' включены (приведены в действие) в противоположных полярностях, а именно магнит 30 содержит северную (N) полярность, тогда как магнит 30' содержит южную (S) полярность. Фиг. 5B показывает силы, получаемые, если верхний магнит 20 включается (полярность S), а нижние магниты 30 и 30' не приводятся в действие. Фиг. 5C показывает силы магнитного поля, получаемые, если все магниты, а именно нижние магниты 30, 30' и верхний магнит 20, включаются одновременно. Нижний магнит 30 содержит северную (N) полярность, тогда как магнит 30' содержит южную (S) полярность.
Чтобы избежать перемещения частиц в боковом относительно поверхности сенсора направлении в пределах области обнаружения, сила магнитного поля магнитных катушек, предпочтительно, управляется посредством напряжения формы. В частности, применяемые напряжения верхней и нижних катушек и длины импульсов и время между двумя циклами, предпочтительно, подбираются таким образом, чтобы частицы 10 мигрировали приблизительно на одно и то же расстояние во время обеих фаз, то есть фазы по направлению от и к поверхности сенсора (см. Фиг. 3А и B). Таким образом, минимизируется время, за которое частицы на поверхности испытывают боковую силу.
Как показано на Фигуре 3А, верхний магнит может использоваться для вытягивания частиц с поверхности A на определенное расстояние, после которого нижние магниты включаются лишь на такое время, чтобы частицы снова достигли поверхности A. Предпочтительно, чтобы нижние магниты 30 и 30' включались лишь на короткое время таким образом, чтобы частицы ускорялись в направлении к поверхности сенсора. После выключения нижних магнитов 30, 30', частицы все еще рассеиваются во время «времени между циклами» по направлению к поверхности сенсора.
Значения напряжений, зависящие от времени для предпочтительной модели приведения в действие, иллюстративно изображены на Фиг. 4. Однако как будет учитываться специалистами в данной области техники, предпочтительные длины импульсов зависят от конкретной конфигурации магнитов, конкретного размера частицы, конкретной концентрации частиц, и т.д. Иллюстрированная модель приведения в действие предоставляет способ мягкого приведения в действие, в частности предпочтительный при обнаружении пикомолярной концентраций гормона паращитовидной железы и сердечного тропонина I, но вряд ли является применимым для других чувствительных анализов или также анализов со слабыми связями. Данная схема приведения в действие минимизирует боковые силы и приводит к значительному увеличению скорости и чувствительности данных анализов.
В частности, чередование использования верхнего 20 и нижних магнитов 30, 30' в соответствии со следующим способом может предотвращать повреждение поверхности. Магнитные или намагничиваемые цели/частицы, расположенные на или около поверхности A сенсора, направлены от поверхности A сенсора. Это может достигаться посредством приведения в действие верхнего магнита 20 таким образом, чтобы магнитные частицы вытягивались с поверхности (Фиг. 3А). Вместо вытягивания частиц с поверхности посредством верхнего магнита частицы могут выталкиваться или отталкиваться в противоположную сторону при помощи нижних магнитов. Кроме того, комбинация вытягивания и выталкивания частиц может достигаться посредством соответствующего приведения в действие верхней и нижних магнитных катушек. На следующем этапе частицы, перемещенные от поверхности сенсора, затем притягиваются с использованием нижних катушек лишь на такое расстояние, чтобы частицы 1 снова достигли поверхности A (см. Фиг. 3B). Опять же, комбинация выталкивания и отталкивания частиц может достигаться посредством соответствующего приведения в действие верхней и нижних магнитных катушек.
Фиг. 4 показывает, например, детали установок, которые могут использоваться для предотвращения повреждения поверхности при иммунохимическом сэндвич-анализе для сердечного тропонина I. Нижняя катушка 30 работает при уровне импульса, равном 500 милливольт, частоте 4 Гц, рабочем цикле 25% с граничным временем в 1%. Другая нижняя катушка 30' работает таким же способом при уровне импульса, равном 500 милливольт. Верхняя катушка 20 работает с использованием такой же частоты, рабочего цикла и граничного времени с использованием исключительно уровня импульса, равного 800 милливольт, и сдвигом фазы, равным 75%. Как будет очевидно специалистам в данной области техники, вышеупомянутые значения зависят от используемой компоновки (катушки, трехмерное расположение и т.д.). Другими словами, вышеописанный вариант осуществления с тремя магнитными катушками является лишь предпочтительным вариантом осуществления в соответствии с настоящим изобретением. Однако общий способ также является применимым к другим схемам приведения в действие с другими конфигурациями магнитов.
Фиг. 9 обращается к дополнительному предпочтительному варианту осуществления настоящего изобретения, в котором перемещение частиц управляется во время измерения. Диаграмма Фиг. 9 показывает изменение сигнала во время последней части эксперимента с биодатчиком, например последние части попеременного приведения в действие (режим I), магнитного промывания (режим II) и обнаружения сигнала (режим III). Как может быть замечено, сигнал значительно изменяется во время попеременного приведения в действие и этапа промывания (режимы I и II). Например, отношение сигнал к шуму S/N (определяемое как результат деления сигнала на среднеквадратическое отклонение) в данном заданном примере равняется: S/N=77. После этапа промывания предоставляется импульс обнаружения в соответствии с настоящим изобретением, а именно, по существу, не допускается перемещения частиц по направлению к области обнаружения сенсора или от нее. Такой импульс обнаружения во время последнего этапа гарантирует устойчивый сигнал, приводящий к высокому отношению S/N. Например, в режиме III на Фиг. 9 показывается отношение S/N=1140. С таким импульсом обнаружения шум во время этапа обнаружения может быть сокращен таким образом, чтобы шум, по существу, был равен аппаратному шуму, наблюдаемому при отсутствии частиц.
В то время как изобретение было подробно иллюстрировано и описано в чертежах и предшествующем описании, такое иллюстрирование и описание следует считать наглядными или иллюстративными, а не ограничивающими; следовательно, изобретение не ограничивается раскрытыми вариантами осуществления. Изменения к раскрытым вариантам осуществления могут истолковываться и приводиться в жизнь посредством специалистов в данной области техники, а осуществление на практике заявленного изобретения - из изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, а использование единственного числа не исключает наличия множества. Одиночный процессор или другой блок может выполнять функции нескольких деталей, изложенных в формуле изобретения. Сам факт того, что определенные признаки излагаются в различных зависимых пунктах формулы изобретения, не означает, что сочетание этих признаков не может использоваться для обеспечения преимущества. Любые ссылочные обозначения в формуле изобретения не следует рассматривать в качестве ограничения ее объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БИОСЕНСОРА ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ МАГНИТНЫХ ЧАСТИЦ | 2009 |
|
RU2519655C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБНАРУЖЕНИЯ | 2008 |
|
RU2480768C2 |
| БИОСЕНСОР С КВАДРУПОЛЬНОЙ МАГНИТНОЙ СИСТЕМОЙ ВОЗДЕЙСТВИЯ | 2009 |
|
RU2519017C2 |
| УСТРОЙСТВО И СПОСОБЫ ДЕТЕКТИРОВАНИЯ АНАЛИТОВ В СЛЮНЕ | 2009 |
|
RU2530718C2 |
| НОСИТЕЛЬ ДЛЯ ОПТИЧЕСКОГО ДЕТЕКТИРОВАНИЯ В МАЛЫХ ОБЪЕМАХ ОБРАЗЦА | 2009 |
|
RU2502985C2 |
| МИКРОЭЛЕКТРОННОЕ СЕНСОРНОЕ УСТРОЙСТВО СЕНСОРА ДЛЯ ДЕТЕКТИРОВАНИЯ ЦЕЛЕВЫХ ЧАСТИЦ | 2008 |
|
RU2489704C2 |
| УСТРОЙСТВО И СПОСОБ ЭЛЕКТРОМАГНИТНОГО АКУСТИЧЕСКОГО КОНТРОЛЯ МАТЕРИАЛА И/ИЛИ ИЗМЕРЕНИЯ ТОЛЩИНЫ ИСПЫТУЕМОГО ОБЪЕКТА, СОДЕРЖАЩЕГО ПО МЕНЬШЕЙ МЕРЕ ЭЛЕКТРОПРОВОДЯЩИЕ И ФЕРРОМАГНИТНЫЕ КОМПОНЕНТЫ | 2005 |
|
RU2393468C2 |
| АНАЛИЗ ТРОПОНИНА I С ПРИМЕНЕНИЕМ МАГНИТНЫХ МЕТОК | 2009 |
|
RU2530716C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ТРАНСПОРТИРОВКИ МАГНИТНЫХ ИЛИ НАМАГНИЧИВАЮЩИХСЯ ШАРИКОВ | 2010 |
|
RU2543192C2 |
| ПРОТОКОЛ СМЕШАННОГО ВОЗБУЖДЕНИЯ ДЛЯ УСТРОЙСТВА МАГНИТНОГО БИОДАТЧИКА | 2009 |
|
RU2491540C2 |

Группа изобретений относится к медицине, а именно к лабораторной диагностике, и может быть использована для управления перемещением магнитных или намагничиваемых объектов в картридже биосенсора. Для этого проводят следующие этапы, на которых: (a) предоставляют картридж биосенсора с проходящей в боковом направлении поверхностью сенсора и, по меньшей мере, средство формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности сенсора; (b) попеременно приводят в действие средство формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты перпендикулярно к поверхности сенсора от поверхности сенсора и к ней, причем длины импульсов попеременного приведения в действие подбираются таким образом, чтобы во время упомянутого попеременного приведения в действие не допускалось бокового перемещения намагничиваемых объектов вдоль проходящей в боковом направлении поверхности сенсора и (c) предоставляют импульс обнаружения, магнитное поле во время которого подбирается таким образом, чтобы не допускалось перемещения магнитных или намагничиваемых объектов в направлении силы гравитации. Также предложены биосенсорные системы. Группа изобретений обеспечивает увеличение чувствительности анализа за счет компенсирования силы гравитации. 10 н. и 7 з.п. ф-лы, 9 ил.
1. Способ управления перемещением магнитных или намагничиваемых объектов (10) в картридже биосенсора, причем способ содержит этапы, на которых:
(a) предоставляют картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора и, по меньшей мере, средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(b) попеременно приводят в действие средство (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора от поверхности сенсора и к ней, причем длины импульсов попеременного приведения в действие подбираются таким образом, чтобы во время упомянутого попеременного приведения в действие не допускалось бокового перемещения намагничиваемых объектов вдоль проходящей в боковом направлении поверхности сенсора, и
(c) предоставляют импульс обнаружения, магнитное поле во время которого подбирается таким образом, чтобы не допускалось перемещения магнитных или намагничиваемых объектов (10) в направлении силы гравитации.
2. Способ по п.1, в котором магнитные или намагничиваемые объекты, связанные с поверхностью сенсора, обнаруживают во время импульса обнаружения.
3. Способ управления перемещением магнитных и намагничиваемых объектов (10) в картридже биосенсора, причем способ содержит этапы, на которых:
(a) предоставляют картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора и, по меньшей мере, средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(b) попеременно приводят в действие средство (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от поверхности сенсора и к ней, причем длины импульсов попеременного приведения в действие подбираются таким образом, чтобы во время упомянутого попеременного приведения в действие не допускалось бокового перемещения намагничиваемых объектов вдоль проходящей в боковом направлении поверхности сенсора,
в котором под поверхностью (А) сенсора расположены два электромагнита (30, 30′), которые одновременно приводятся в действие с противоположными полярностями для направления намагничиваемых объектов по направлению к поверхности (А) сенсора или одновременно приводятся в действие с одинаковыми полярностями для направления намагничиваемых объектов от поверхности сенсора.
4. Способ управления перемещением магнитных и намагничиваемых объектов (10) в картридже биосенсора, причем способ содержит этапы, на которых:
(a) предоставляют картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора и, по меньшей мере, средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(b) попеременно приводят в действие средство (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от поверхности сенсора и к ней, причем длины импульсов попеременного приведения в действие подбираются таким образом, чтобы во время упомянутого попеременного приведения в действие не допускалось бокового перемещения намагничиваемых объектов вдоль проходящей в боковом направлении поверхности сенсора,
при этом частота попеременного приведения в действие более 1 Гц и ниже 10 Гц.
5. Способ по п.4, в котором частота попеременного приведения в действие предпочтительно составляет более 2 Гц и ниже 6 Гц, более предпочтительно - между 3 и 5 Гц, и еще более предпочтительно 4 Гц.
6. Способ управления действием магнитных или намагничиваемых объектов (10) в картридже биосенсора, причем способ содержит этапы, на которых:
(а) предоставляют картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора и, по меньшей мере, средство (20, 30, 30′) формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (10) сенсора,
(b) попеременно приводят в действие средство (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от поверхности сенсора и к ней, причем длины импульсов попеременного приведения в действие подбирают таким образом, чтобы во время упомянутого попеременного приведения в действие не допускалось бокового перемещения намагничиваемых объектов вдоль проходящей в боковом направлении поверхности сенсора,
в котором во время периода попеременного приведения в действие любые магнитные или намагничиваемые объекты, расположенные на поверхности сенсора, сначала перемещаются на заданное расстояние от поверхности, а затем перемещаются на такое же заданное расстояние к поверхности.
7. Способ управления перемещением магнитных или намагничиваемых объектов (10) в картридже биосенсора, причем способ содержит этапы, на которых:
(а) предоставляют картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора и, по меньшей мере, средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(b) попеременно приводят в действие средство (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от поверхности сенсора и к ней, причем длины импульсов попеременного приведения в действие подбираются таким образом, чтобы во время упомянутого попеременного приведения в действие не допускалось бокового перемещения намагничиваемых объектов вдоль проходящей в боковом направлении поверхности сенсора,
(c) в пределах периода попеременного приведения в действие формируют магнитное поле с первой длиной импульса для направления магнитных или намагничиваемых объектов по направлению к поверхности (А) сенсора, и
(d) затем формируют магнитное поле со второй длиной импульса для направления магнитных или намагничиваемых объектов от поверхности (А) сенсора и временным интервалом между первой длиной импульса и второй длиной импульса, на котором не формируется никакого магнитного поля.
8. Способ по п.7, в котором первая длина импульса с силой сформированного магнитного поля и вторая длина импульса с силой сформированного магнитного поля подбираются таким образом, чтобы магнитные или намагничиваемые объекты направлялись приблизительно на одинаковое расстояние во время фаз перемещений по направлению от поверхности сенсора и к поверхности сенсора.
9. Способ по п.8, в котором первая и/или вторая длина импульса составляет по меньшей мере 5% периода, предпочтительно по меньшей мере 20%, более предпочтительно приблизительно 25% и предпочтительно менее 40%.
10. Способ по п.7, в котором временной интервал между первой длиной импульса и второй длиной импульса составляет более 30% периода, предпочтительно более чем 40% и более предпочтительно 50%.
11. Биосенсорная система, содержащая:
(a) картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора,
(b) по меньшей мере средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(c) блок привода для попеременного приведения в действие средства (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от и к поверхности сенсора, при этом блок привода формирует длины импульсов попеременного приведения в действие, не допускающего бокового перемещения намагничиваемых объектов вдоль поверхности сенсора во время упомянутого попеременного приведения в действие,
в которой средство формирования магнитного поля содержит два или более электромагнитов (30, 30′, 20), расположенных под или над поверхностью (А) сенсора, причем по меньшей мере один из электромагнитов располагается под поверхностью (А) сенсора, и в которой блок привода выполнен с возможностью одновременного приведения в действие по меньшей мере двух электромагнитов (30, 30′), располагаемых под поверхностью (А) сенсора, с противоположными полярностями для направления намагничиваемых объектов к поверхности (А) сенсора и/или для одновременного приведения в действие по меньшей мере двух электромагнитов (30, 30′) с одинаковыми полярностями для направления намагничиваемых объектов от поверхности сенсора.
12. Биосенсорная система по п.11, в которой картридж биосенсора выполнен съемным.
13. Биосенсорная система, содержащая:
(a) картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора,
(b) по меньшей мере, средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(c) блок привода для попеременного приведения в действие средства (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от поверхности сенсора и к ней, при этом блок привода формирует длины импульсов попеременного приведения в действие, не допускающего бокового перемещения намагничиваемых объектов вдоль поверхности сенсора во время упомянутого попеременного приведения в действие, в которой средство формирования магнитного поля содержит два или более электромагнитов (30, 30′, 20), расположенных под или над поверхностью (А) сенсора, причем по меньшей мере один из электромагнитов располагается под поверхностью (А) сенсора, и в которой блок привода выполнен с возможностью обеспечения импульса обнаружения, магнитное поле во время которого подбирается таким образом, чтобы не допускалось перемещения магнитных или намагничиваемых объектов (10) в направлении силы гравитации.
14. Биосенсорная система, содержащая:
(a) картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора,
(b) по меньшей мере, средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(c) блок привода для попеременного приведения в действие средства (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от поверхности сенсора и к ней, при этом блок привода формирует длины импульсов попеременного приведения в действие, не допускающего бокового перемещения намагничиваемых объектов вдоль поверхности сенсора,
в которой средство формирования магнитного поля содержит два или более электромагнитов (30, 30′, 20), расположенных под или над поверхностью (А) сенсора, причем по меньшей мере один из электромагнитов располагается под поверхностью (А) сенсора, и в которой блок привода выполнен с возможностью обеспечения частоты попеременного приведения в действие более 1 Гц и менее 10 Гц.
15. Система по п.14, в которой блок привода выполнен с возможностью обеспечения частоты попеременного приведения в действие предпочтительно более 2 Гц и менее 6 Гц, более предпочтительно между 3 и 5 Гц, более предпочтительно 4 Гц.
16. Биосенсорная система, содержащая:
(a) картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора,
(b) по меньшей мере, средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(c) блок привода для попеременного приведения в действие средства (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от поверхности сенсора и к ней, при этом блок привода формирует длины импульсов попеременного приведения в действие, не допускающего бокового перемещения намагничиваемых объектов вдоль поверхности сенсора во время упомянутого попеременного приведения в действие,
в которой средство формирования магнитного поля содержит два или более электромагнитов (30, 30′, 20), расположенных под или над поверхностью (А) сенсора, причем по меньшей мере один из электромагнитов располагается под поверхностью (А) сенсора, и в которой блок привода выполнен с возможностью приведения в действие средства формирования магнитного поля таким образом, чтобы магнитные или намагничиваемые объекты, расположенные на поверхности сенсора, сначала перемещались на заданное расстояние по направлению от поверхности, а затем перемещались на такое же заданное расстояние к поверхности.
17. Биосенсорная система, содержащая:
(a) картридж биосенсора с проходящей в боковом направлении поверхностью (А) сенсора,
(b) по меньшей мере, средство (20, 30, 30′) формирования магнитного поля для формирования магнитного поля с градиентом поля, перпендикулярным к поверхности (А) сенсора,
(c) блок привода для попеременного приведения в действие средства (20, 30, 30′) формирования магнитного поля таким образом, чтобы сформированное магнитное поле попеременно направляло магнитные или намагничиваемые объекты (10) перпендикулярно к поверхности (А) сенсора по направлению от поверхности сенсора и к ней, при этом блок привода формирует длины импульсов попеременного приведения в действие, не допускающего бокового перемещения намагничиваемых объектов вдоль поверхности сенсора во время упомянутого попеременного приведения в действие,
в которой средство формирования магнитного поля содержит два или более электромагнитов (30, 30′, 20), расположенных под или над поверхностью (А) сенсора, причем по меньшей мере один из электромагнитов располагается под поверхностью (А) сенсора, и в которой блок привода выполнен с возможностью
(d) формирования в пределах периода попеременного приведения в действие магнитного поля с первой длиной импульса для направления магнитных или намагничиваемых объектов по направлению к поверхности (А) сенсора, и
(e) последующего формирования магнитного поля со второй длиной импульса для направления магнитных или намагничиваемых объектов от поверхности (А) сенсора и временного интервала между первой длиной импульса и второй длиной импульса, в течение которого магнитное поле не формируется.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

