Изобретение относится к железнодорожному транспорту и может быть использовано в централизованных системах управления движением поездов.
Известна система управления движением поездов, содержащая в бортовом устройстве управления локомотивом подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, а также устройство выявления неисправностей, интерактивное устройство интеллектуального контроля бодрствования машиниста, включающее узел физиологического контроля и узел регистрации управляющих действий машиниста по ведению поезда и два интерактивных устройства визуализации информации, по одному в каждой кабине машиниста, каждое из которых содержит цветной графический дисплей и устройство отображения и безопасного ручного ввода ответственной информации, общесистемный высокоскоростной CAN-интерфейс, объединяющий все подсистемы устройства и блоки бортовой системы управления и обеспечивающий обмен между ними цифровой информацией и передачу управляющих команд, устройство регистрации в реальном времени всей цифровой информации, циркулирующей в CAN-интерфейсе на энергонезависимый носитель, систему датчиков пути и скорости движения, приемное устройство непрерывного и точечного индуктивных каналов связи, устройство спутниковой навигационной системы и электронной карты маршрутов, систему датчиков давления в основных агрегатах пневматической тормозной системы локомотива и приемопередатчик цифрового канала радиосвязи, соединенный через цифровой канал радиосвязи с блоком электрической централизации, входы /выходы которого соединены с путевыми устройствами рельсовых цепей и автоматической локомотивной сигнализации непрерывного типа, изолированных путевых участков и соответствующих им путевых и маневровых светофоров (RU 2355596, B61L 3/00, 20.05.09).
Недостатком известной системы является невозможность принудительной остановки подвижной единицы по командам из центра управления движением поездов.
Наиболее близкой по совокупности существенных признаков и функциональным возможностям является выбранная в качестве прототипа система управления движением поездов, содержащая на локомотивах подсистему контроля безопасности движения, в которой имеются соединенные между собой кабелем системного CAN-интерфейса блоки электроники, индикации, коммутации и ввода данных, блок питания, радиомодем, соединенные с блоком электроники антенны GPS/ГЛОНАСС, кнопка «Тревога», приставка крана машиниста, электропневматический вентиль, радиомодем через дуплексный фильтр соединен с бортовой радиоантенной, а на железнодорожных станциях размещены стационарные устройства, в состав каждого из которых входят блок контроля, первый вход которого соединен с первым портом стационарного радиомодема, а второй вход - с системными блоками персональных компьютеров и автоматизированного рабочего места, которые соединены между собой, дуплексный фильтр, соединенный со вторым портом стационарного радиомодема и со стационарной радиоантенной и входом грозоразрядника, системные блоки персональных компьютеров и автоматизированного рабочего места соединены с навигационным приемником GPS/ГЛОНАСС и выходом устройства сопряжения с системами электрической и диспетчерской централизации и диспетчерского контроля, навигационный приемник GPS/ГЛОНАСС подключен к антенне GPS/ГЛОНАСС, а сетевой фильтр соединен с блоком контроля и персональными компьютерами автоматизированного рабочего места через устройство бесперебойного питания (RU 2405702, B61L 25/04, 10.12.10). Это техническое решение обеспечивает принудительное экстренное торможение по решению операторов системы.
Недостатком этой системы является ограниченность функциональных возможностей, связанная с отсутствием возможности автоматического взаимодействия стационарного устройства со средствами торможения локомотивов, что снижает безопасность движения из-за недостаточной оперативности принятия решений по экстренной остановке поезда в целом ряде ситуаций. Например, в системе возможен проезд запрещающих сигналов светофоров при ошибках в применении машинистами служебного торможения.
Технической задачей изобретения является повышение безопасности движения поездов.
Технический результат заключается в повышении эффективности управления за счет использования уточненных данных по условиям торможения и фиксации опасных условий для движения поезда.
Технический результат достигается тем, что в системе управления движением поездов, содержащей на каждой железнодорожной станции автоматизированное рабочее место диспетчера, блок контроля, один вход которого соединен с первым портом радиомодема, а другой - с соединенными между собой системными блоками персональных компьютеров автоматизированного рабочего места диспетчера, второй порт радиомодема через дуплексный фильтр соединен со стационарной радиоантенной и входом грозоразрядника, системные блоки персональных компьютеров автоматизированного рабочего места диспетчера соединены с выходом блока сопряжения с системами электрической и диспетчерской централизации и диспетчерского контроля и выходом навигационного приемника, а на каждом локомотиве подключенные к системному интерфейсу модули центральной обработки информации, которые соединены между собой, модуль маршрута, модуль радиоканала, блок индикации, коммутации и ввода данных, кнопка тревоги, приставка крана машиниста, выходы модулей центральной обработки информации подключены к блоку контроля безопасности, выход которого через усилитель подключен к управляющему входу электропневматического клапана, вход модуля маршрута соединен с выходом навигационного приемника, модуль радиоканала через дуплексный фильтр соединен с радиомодемом, к системному интерфейсу подключен управляющий вход блока управления тягой локомотива, согласно изобретению на каждой железнодорожной станции к компьютерам автоматизированного рабочего места подключены модуль расчета кривых служебного торможения поездов и модуль контроля правильности выполнения расчетных кривых служебного торможения, вход которого соединен с выходом блока мониторинга местных условий внешней среды на железнодорожных путях станции и примыкающих к ней участков приближения и удаления, а на каждом локомотиве к системному интерфейсу подключен блок автоматического управления служебным торможением.
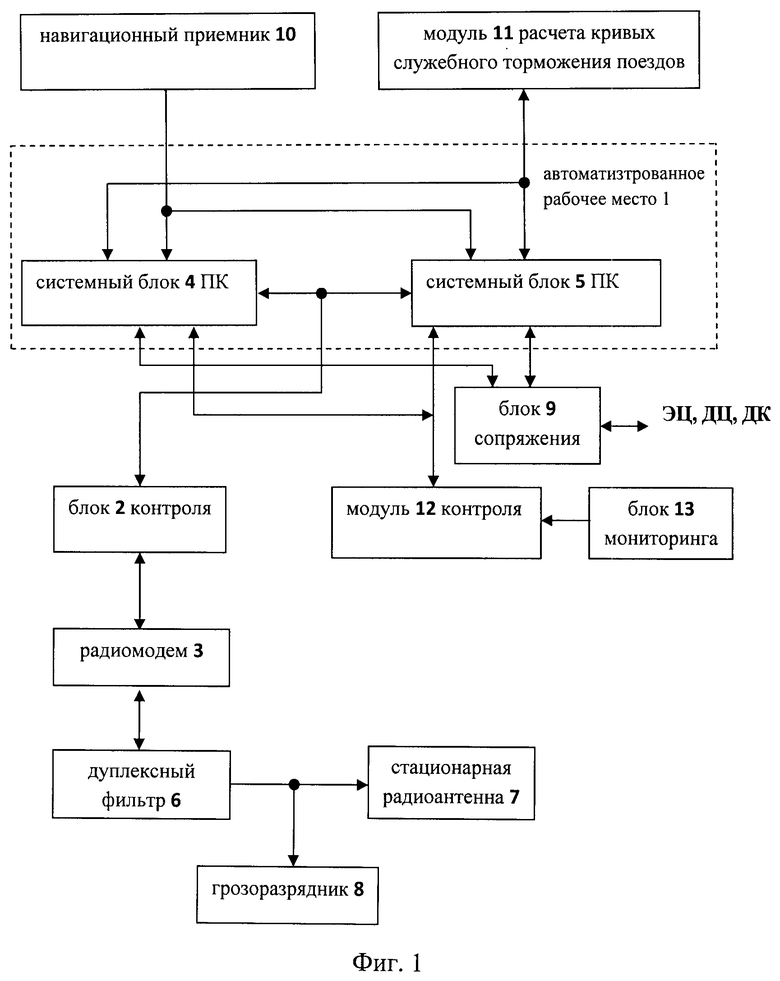
На фиг.1 приведена схема стационарной части системы управления движением поездов, размещенной на каждой железнодорожной станции, на фиг.2 приведена схема части системы управления движением поездов, размещенной на каждом локомотиве.
Система управления движением поездов содержит на каждой железнодорожной станции автоматизированное рабочее место 1 диспетчера, блок 2 контроля, один вход которого соединен с первым портом радиомодема 3, а другой - с соединенными между собой системными блоками 4, 5 персональных компьютеров автоматизированного рабочего места 1 диспетчера, второй порт радиомодема 3 через дуплексный фильтр 6 соединен со стационарной радиоантенной 7 и входом грозоразрядника 8, системные блоки 4, 5 персональных компьютеров автоматизированного рабочего места диспетчера соединены с выходом блока 9 сопряжения с системами электрической и диспетчерской централизации и диспетчерского контроля, с выходом навигационного приемника 10, с модулем 11 расчета кривых служебного торможения поездов и с модулем 12 контроля правильности выполнения расчетных кривых служебного торможения, вход которого соединен с выходом блока 13 мониторинга местных условий внешней среды на железнодорожных путях станции и примыкающих к ней участков приближения и удаления. На каждом локомотиве к системному интерфейсу 14 подключены модули 15, 16 центральной обработки информации, которые соединены между собой, модуль 17 маршрута, модуль 18 радиоканала, блок 19 индикации, коммутации и ввода данных, кнопка 20 тревоги, приставка 21 крана машиниста, выходы модулей 15, 16 центральной обработки информации подключены к блоку 22 контроля безопасности, выход которого через усилитель 23 подключен к управляющему входу электропневматического клапана 24, вход модуля 17 маршрута соединен с выходом навигационного приемника 25, модуль 18 радиоканала через дуплексный фильтр 26 соединен с радиомодемом 27, к системному интерфейсу 14 подключен управляющий вход блока 28 управления тягой локомотива, и блок 29 автоматического управления служебным торможением.
Система управления движением поездов работает следующим образом.
Функциональные узлы предлагаемой системы, размещенные на каждой железнодорожной станции, являются ведущими при организации радиообмена. Двухсторонняя связь с локомотивами обеспечивается по радиоканалу, образуемому при взаимодействии радиомодемов 3 и 27.
Сигналы, принимаемые радиомодемом 27 на локомотиве от стационарного радиомодема 3 через дуплексный фильтр 26, поступают в модуль 18 радиоканала, который обрабатывает их в соответствии с алгоритмом взаимодействия. Дуплексные фильтры 6 и 26 обеспечивают одновременную работу радиопередатчиков и приемников радиомодемов 3 и 27 на радиоантенны с минимальным взаимным влиянием и без ухудшения качества приема.
Навигационный приемник 25 GPS/TJIOHACC формирует данные о местоположении локомотива (широта, долгота). Эти данные поступают через модуль 17 маршрута в модули 15, 16 центральной обработки информации, которые определяют местоположение локомотива в железнодорожных координатах (метры).
При возникновении на локомотиве чрезвычайной ситуации машинист или помощник машиниста при следовании в зоне связи со станцией нажатием кнопки 20 тревоги передает по радиоканалу, образованному взаимодействием радиомодемов 3 и 27, в блок контроля 2 и системные блоки 4, 5 персональных компьютеров автоматизированного рабочего места 1 диспетчера сигнал о необходимости принудительной остановки локомотива. Кнопка 20 тревоги обеспечивает дополнительное оповещение дежурного по станции или поездного диспетчера об экстренной ситуации на поезде. Блок 2 контроля сравнивает данные, поступающие от персональных компьютеров (системные блоки 4, 5) автоматизированного рабочего места 1 диспетчера и взаимодействует с радиомодемом 3.
После получения с автоматизированного рабочего места 1 диспетчера ответного сигнала разрешения принудительной остановки локомотива команда поступает в блок 28 управления тягой локомотива и начинается служебное торможение через приставку 21 крана машиниста до автостопного торможения локомотива электропневматическим клапаном 24. В это время в блоке 19 индикации, коммутации и ввода данных отображается признак принудительной остановки локомотива.
Проведение принудительной остановки локомотива блокирует возможность прерывать начавшийся процесс.
После полной остановки локомотива машинист по поездной радиосвязи выясняет с диспетчером (дежурным по станции) причину остановки.
После отмены команды на принудительную остановку электропневматический клапан 24 устанавливается в рабочее положение.
Передача команды проезда запрещающего сигнала производится с автоматизированного рабочего места 1 диспетчера в следующей последовательности.
Диспетчер (дежурный по станции), убедившись в наличии режима устойчивой радиосвязи с локомотивом и в остановке локомотива перед светофором с красным показанием, подает через автоматизированное рабочее место 1 диспетчера команду разрешения проследования запрещающего сигнала. После получения разрешения проезда запрещающего сигнала на блоке 19 индикации, коммутации и ввода данных до начала движения значение допустимой скорости локомотива устанавливается равным 20 км/ч, а сигнал «КЖ» в блоке 19 индикации, коммутации и ввода данных изменяется на «БМ». После отмены данной команды диспетчера (дежурного по станции) отменяется разрешение проезда запрещающего сигнала.
Передача на локомотив временных ограничений скорости, а также расчет и отработка локомотивом кривой торможения до места ограничения скорости движения производится в следующей последовательности.
Диспетчер (дежурный по станции) с автоматизированного рабочего места 1 диспетчера вводит характеристики ограничений скорости и убеждается в наличии режима устойчивой радиосвязи с локомотивами по радиоканалу, образуемому взаимодействием радиомодемов 3 и 27.
После получения с автоматизированного рабочего места 1 команды временного ограничения модули 15, 16 центральной обработки информации отрабатывают рассчитанную модулем 11 расчета кривых служебного торможения поездов кривую торможения при подъезде к месту ограничения скорости движения.
Передача сигналов АЛС производится в следующей последовательности.
Диспетчер (дежурный по станции) убеждается в наличии режима устойчивой двухсторонней радиосвязи с локомотивом. При нахождении локомотива на некодируемом участке на локомотивном светофоре высвечивается показание, переданное по радиоканалу. Показание локомотивного светофора независимо контролируется на станциях модулем 12 контроля правильности выполнения расчетных кривых служебного торможения, вход которого соединен с выходом блока 13 мониторинга местных условий внешней среды на железнодорожных путях станции и примыкающих к ней участков приближения и удаления. При фиксации ошибки модулем 12 контроля правильности выполнения расчетных кривых служебного торможения блок 2 контроля формирует и передает команды на экстренное торможение соответствующего поезда. Периодический обмен оперативной информацией по радиоканалу, образуемому взаимодействием радиомодемов 3 и 27 с блоком 29 автоматического управления служебным торможением, сокращает количество переходов со служебного на экстренное торможение. Уточняющая информация обеспечивает правильный расчет кривых служебного торможения.
На автоматизированное рабочее место 1 диспетчера поступают по радиоканалу данные, которые блок 29 автоматического управления служебным торможением планирует использовать при следующем служебном торможении. В частности, среди этих данных есть данные по коэффициенту торможения, определенному на локомотиве по результатам предыдущего служебного торможения. Блок 13 мониторинга местных условий внешней среды на железнодорожных путях станции и примыкающих к ней участков приближения и удаления и модуль 11 расчета кривых служебного торможения поездов определяют необходимость передачи на каждый локомотив индивидуально поправок для перерасчета его блоком 29 автоматического управления служебным торможением следующего служебного торможения. Поправки вырабатываются и передаются на локомотивы по радиоканалу, если реальные условия на следующем участке предполагаемого служебного торможения хуже, чем те, которые учитывает блок 29 автоматического управления служебным торможением на основании данных, измеренных во время предыдущего служебного торможения. Параллельно модуль 11 расчета кривых служебного торможения независимо рассчитывает свои варианты тормозных кривых для следующих участков предполагаемого служебного торможения поездов. Во время следующего служебного торможения каждого из локомотивов его блок 29 автоматического управления служебным торможением передает в модуль 12 контроля правильности выполнения расчетных кривых служебного торможения реально измеренные значения скорости на характерных участках тормозного пути для проверки соответствия скорости поезда рассчитанным ограничениям. Если, по каким-либо причинам скорость поезда превышает заданную пороговую величину, модуль 12 контроля правильности выполнения расчетных кривых служебного торможения передает команду на экстренное торможение соответствующего поезда. Эта команда обрабатывается модулями 15, 16 центральной обработки информации и через блок 22 контроля безопасности и усилитель 23 поступает на электропневматический клапан 24 независимо от действий машиниста и команд блока 29 автоматического управления служебным торможением.
В процессе непрерывного мониторинга условий, влияющих на движение и служебное торможение, блок 13 мониторинга местных условий внешней среды на железнодорожных путях станции и примыкающих к ней участков приближения и удаления измеряет количественные значения метеорологических факторов (температура, влажность, скорость выпадения и количество осадков, скорость ветра) и осуществляет автоматическое распознавание образов, характеризующих состояние железнодорожных путей (например, загрязнение смазкой, наличие мусора, листвы, снега, размыв и затопление, посторонние предметы, туман и другие). При обнаружении на путях объектов, угрожающих безопасности движения поездов, блок 13 мониторинга местных условий внешней среды на железнодорожных путях станции и примыкающих к ней участков приближения и удаления может инициировать формирование команды на включение экстренного торможения электропневматическим клапаном 24 независимо от действий машиниста и команд блока 29 автоматического управления служебным торможением.
Таким образом, предлагаемая система обеспечивает повышение безопасности движения. При фиксации опасных условий для движения поезда, обусловленных состоянием внешней среды, система осуществляет автоматическую передачу сигналов на включение экстренного торможения поезда. Использование уточненных данных по условиям торможения на участках очередного служебного торможения снижает ошибки в работе блока 29 автоматического управления служебным торможением локомотива и сокращает количество переходов со служебного на экстренное торможение. Правильность работы бортовых устройств локомотивов при осуществлении служебного торможения контролируется на станции и при превышении допустимой скорости служебное торможение заменяется экстренным.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2492090C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2013 |
|
RU2541585C2 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ЛОКОМОТИВА | 2008 |
|
RU2400386C2 |
Изобретение относится к железнодорожному транспорту. Система управления движением поездов содержит АРМ диспетчера, блок контроля, радиомодем, грозоразрядник, при этом ПК АРМа диспетчера соединен с системами электрической и диспетчерской централизации и навигационным приемником. На локомотиве подключены к системному интерфейсу модули центральной обработки информации, которые соединены между собой, модуль маршрута, модуль радиоканала, блок индикации, коммутации и ввода данных, кнопка тревоги, приставка крана машиниста. На каждой железнодорожной станции к компьютерам АРМа подключены модуль расчета кривых служебного торможения поездов и модуль контроля правильности выполнения расчетных кривых служебного торможения, соединенного с блоком мониторинга местных условий внешней среды на железнодорожных путях станции и примыкающих к ней участков приближения и удаления. На каждом локомотиве к системному интерфейсу подключен блок автоматического управления служебным торможением. Достигается повышение эффективности управления. 2 ил.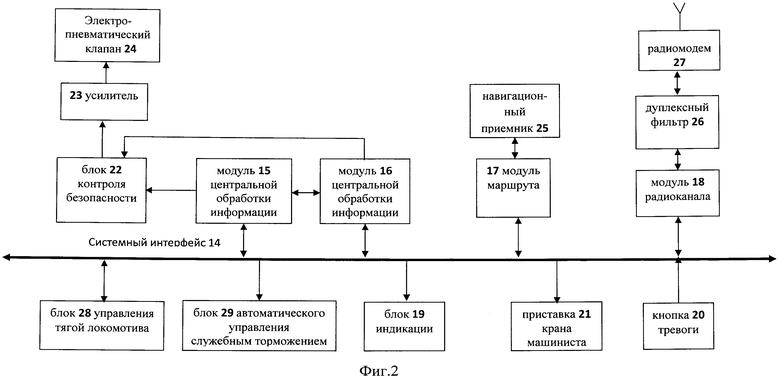
Система управления движением поездов, содержащая на каждой железнодорожной станции автоматизированное рабочее место диспетчера, блок контроля, один вход которого соединен с первым портом радиомодема, а другой - с соединенными между собой системными блоками персональных компьютеров автоматизированного рабочего места диспетчера, второй порт радиомодема через дуплексный фильтр соединен со стационарной радиоантенной и входом грозоразрядника, системные блоки персональных компьютеров автоматизированного рабочего места диспетчера соединены с выходом блока сопряжения с системами электрической и диспетчерской централизации и диспетчерского контроля и выходом навигационного приемника, а на каждом локомотиве подключенные к системному интерфейсу модули центральной обработки информации, которые соединены между собой, модуль маршрута, модуль радиоканала, блок индикации, коммутации и ввода данных, кнопка тревоги, приставка крана машиниста, выходы модулей центральной обработки информации подключены к блоку контроля безопасности, выход которого через усилитель подключен к управляющему входу электропневматического клапана, вход модуля маршрута соединен с выходом навигационного приемника, модуль радиоканала через дуплексный фильтр соединен с радиомодемом, к системному интерфейсу подключен управляющий вход блока управления тягой локомотива, отличающаяся тем, что на каждой железнодорожной станции к компьютерам автоматизированного рабочего места подключены модуль расчета кривых служебного торможения поездов и модуль контроля правильности выполнения расчетных кривых служебного торможения, вход которого соединен с выходом блока мониторинга местных условий внешней среды на железнодорожных путях станции и примыкающих к ней участков приближения и удаления, а на каждом локомотиве к системному интерфейсу подключен блок автоматического управления служебным торможением.
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| US 2003236598 A1, 25.12.2003 | |||

