Изобретение относится к области железнодорожной автоматики и телемеханики, а именно к системам управления движением поездов, и может быть использовано для повышения достоверности определения местоположения поезда на маршруте движения.
Известна система управления движением поездов, в которой для определения местоположения поезда на маршруте движения на борту каждого локомотива установлен опросный узел, включающий приемопередатчик сигналов от путевых приемоответчиков (бализов) и блок измерения скорости, связанный с блоком электронной карты маршрута движения поезда. В момент прохождения над бализами происходит уточнение текущей координаты места нахождения поезда на маршруте, увязанное с электронной картой маршрута (журнал «Железные дороги мира», №2, 2007, с.64).
Недостаток вышеуказанной системы управления движением заключается в необходимости дополнительной путевой и локомотивной аппаратуры (радиоблок-центры, ретрансляторы, евробализы, радары акселерометры и.т.д.) как на грузонапряженных, так и на малодеятельных линиях. В связи с этим использование таких систем требует значительных капитальных вложений.
В качестве прототипа выбрана система управления движением поездов, содержащая в кабине управления поездом комплект устройства единой комплексной системы управления и безопасности движения поезда (ЕКС), который содержит связанные через CAN интерфейс подсистемы контроля безопасности движения, автоматического управления служебным торможением и автоведения, при этом подсистема контроля безопасности движения состоит из подключенных к CAN интерфейсу приемника системы спутниковой навигации, модуля электронной карты маршрута, модуля измерения пройденного пути и модуля памяти длины поезда и бортового радиомодема, связанного через канал цифровой радиосвязи со стационарным радиомодемом поста диспетчерского управления, оборудованного устройствами электрической централизации стрелок и сигналов и контроля рельсовых цепей (RU 2355596, B61L 3/00, 20.05.09).
Известная система управления движением поезда не обладает достаточной надежностью работы в наиболее оптимальном режиме ведения поезда с использованием непрерывного отслеживания координаты его места нахождения по электронной карте маршрута. Это связано как с накоплением ошибки в модуле измерения пройденного пути из-за износа, буксования и юза колес локомотива, связанных с колесными датчиками импульсов, так и из-за сбоев в работе приемника системы спутниковой навигации. Сбои в работе приемника системы спутниковой навигации могут быть обусловлены потерей видимости достаточного количества навигационных спутников в местностях со сложным рельефом и тоннелях, а также в местах с большим уровнем электромагнитных помех, например, в местах пересечения железнодорожной линии с трассами высоковольтных линий электропередач. Сбои приводят к расхождению в измерении текущей координаты и координаты, отслеживаемой по электронной карте маршрута. В условиях появления значительных расхождений система управления поездом переходит на менее эффективное регулирование движения (только по сигналам АЛСН) с определением местоположения поезда с точностью до блок-участков автоблокировки.
Технический результат изобретения заключается в повышении надежности работы в режиме управления движением поезда по электронной карте маршрута.
Технический результат достигается тем, что в системе управления движением поезда, содержащей в кабине управления поездом соединенные через CAN интерфейс подсистему автоведения, подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, состоящую из подключенных к CAN интерфейсу модуля электронной карты маршрута, модуля измерения пройденного пути, приемника системы спутниковой навигации, модуля памяти длины поезда и бортового радиомодема, соединенного через канал цифровой радиосвязи со стационарным радиомодемом поста диспетчерского управления, оборудованного устройством электрической централизации стрелок и сигналов и контроля рельсовых цепей, согласно изобретению в подсистему контроля безопасности движения введен модуль коррекции текущей координаты, который через CAN интерфейс своими первым, вторым, третьим, четвертым и пятым портами соединен соответственно с портами модуля электронной карты маршрута, модуля измерения пройденного пути, приемника системы спутниковой навигации, модуля памяти длины поезда и бортового радиомодема, шестой порт модуля коррекции текущей координаты соединен с блоком памяти, содержащим базу данных приращений длин и координат аппроксимирующих отрезков пути математической модели маршрута движения поезда, выход модуля коррекции текущей координаты соединен с портом управления модуля электронной карты маршрута, а устройство электрической централизации стрелок и сигналов и контроля рельсовых цепей соединено с портом стационарного радиомодема поста диспетчерского управления через блок контроля последовательностей занятия и освобождения рельсовых цепей по маршрутам движения поездов.
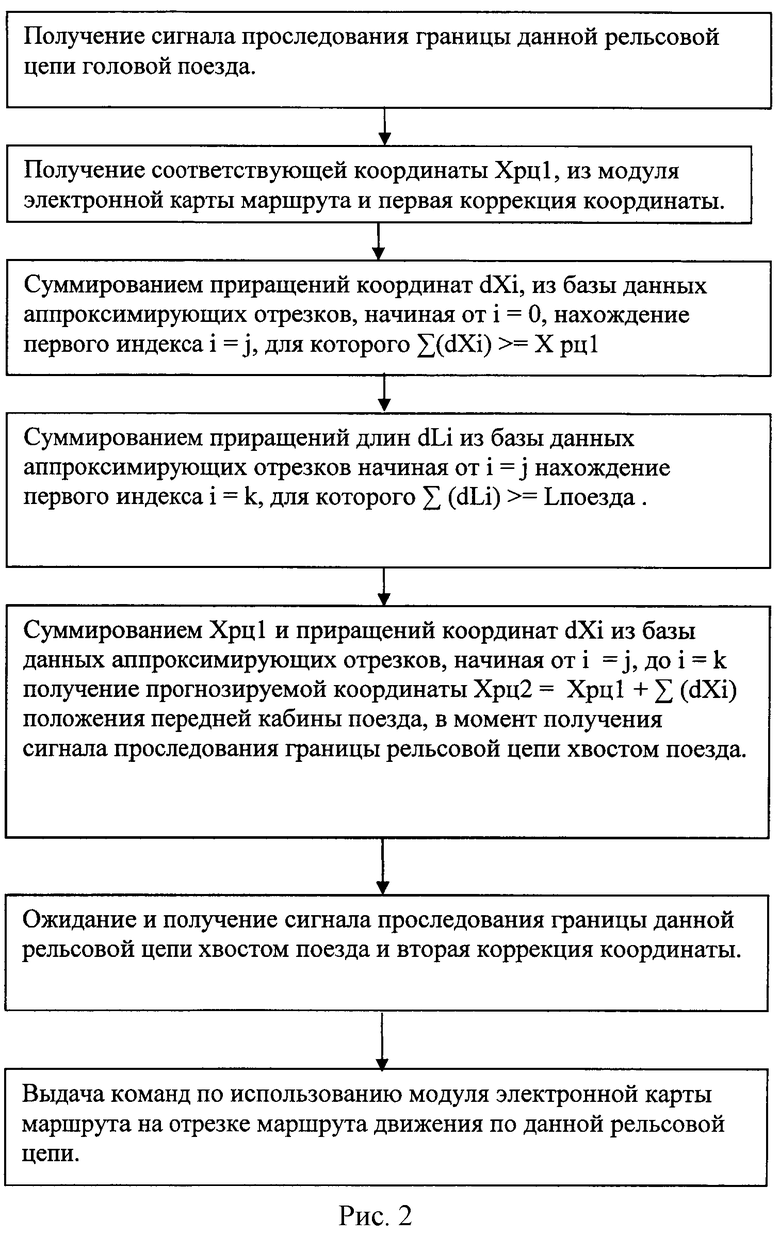
На чертеже (рис.1) приведена схема системы управления движением поезда, на рис.2 приведена блок-схема алгоритма работы модуля коррекции текущей координаты.
Система управления движением поезда содержит в кабине 1 управления поездом соединенные через CAN интерфейс 2 подсистему 3 автоведения, подсистему 4 автоматического управления служебным торможением и подсистему 5 контроля безопасности движения, состоящую из подключенных к CAN интерфейсу 2 модуля 6 электронной карты маршрута, модуля 7 измерения пройденного пути, приемника 8 системы спутниковой навигации, модуля 9 памяти длины поезда и бортового радиомодема 10, соединенного через канал 11 цифровой радиосвязи со стационарным радиомодемом 12 поста 13 диспетчерского управления, оборудованного устройством 14 электрической централизации стрелок и сигналов и контроля рельсовых цепей, в подсистеме 5 контроля безопасности движения модуль 15 коррекции текущей координаты через CAN интерфейс 2 своими первым, вторым, третьим, четвертым и пятым портами соединен соответственно с портами модуля 6 электронной карты маршрута, модуля 7 измерения пройденного пути, приемника 8 системы спутниковой навигации, модуля 9 памяти длины поезда и бортового радиомодема 10, шестой порт модуля 15 коррекции текущей координаты соединен с блоком 16 памяти, содержащим базу данных приращений длин и координат аппроксимирующих отрезков пути математической модели маршрута движения поезда, выход модуля 15 коррекции текущей координаты соединен с портом управления модуля 6 электронной карты маршрута, а устройство 14 электрической централизации стрелок и сигналов и контроля рельсовых цепей соединено с портом стационарного радиомодема 12 поста 13 диспетчерского управления через блок 17 контроля последовательностей занятия и освобождения рельсовых цепей по маршрутам движения поездов.
Система управления движением поезда функционирует следующим образом.
При движении поезда по конкретному участку дороги в подсистеме 5 контроля безопасности движения на основе данных о скоростных ограничениях этого участка, записанных в модуле 6 электронной карты маршрута, а также данных о допустимых скоростях движения, поступающих от путевых устройств АЛСН, АЛС-ЕН и через канал 11 цифровой радиосвязи от стационарного радиомодема 12 поста 13 диспетчерского управления, определяются значения допустимой скорости Vд и целевой скорости Vц движения. Допустимая скорость является максимальной и превышение ее вызывает экстренное торможение.
При использовании электронной карты, по мере приближения локомотива к препятствию, на котором предусмотрено ограничение скорости, значение скорости Vд постепенно снижается в соответствии с заданной кривой торможения до значения Vц. Машинист поезда, при этом, должен поддерживать значение фактической скорости движения Vф<Vд. В таком режиме движения средняя скорость движения поезда определяется препятствием на пути поезда, задающим наиболее жесткое ограничение скорости. Средняя скорость движения поезда с использованием данных электронной карты за счет возможности оптимального движения выше по сравнению со средней скоростью движения без использования данных электронной карты.
Модуль 6 электронной карты маршрута осуществляет:
- запись и хранение данных электронной карты маршрута следования поезда,
- вычисление линейной железнодорожной координаты локомотива, по данным модуля 7 измерения пройденного пути,
- выбор целей на пути поезда (на участке длиной 5000 м) и отслеживание их проследования головой или хвостом поезда,
- поддержка отслеживания целей до конца маршрута при выходе из электронной карты или за пределы участка внесенного в электронную карту.
При работе подсистемы 5 контроля безопасности движения с электронной картой маршрута на дисплее (на чертеже не показан) в кабине машиниста индицируются буквы ЭК (электронная карта) в случае, если по данным из электронной карты маршрута формируется актуальное (действующее в данный период времени) ограничение скорости. После ввода номера пути на дисплее в кабине машиниста также индицируется координата пути и расстояние до препятствия.
Устройство 14 электрической централизации стрелок и сигналов и контроля рельсовых цепей формирует и передает в блок 17 контроля последовательностей занятия и освобождения рельсовых цепей по маршрутам движения поездов данные о занятии и освобождении рельсовых цепей поездами, находящимися в зоне управления движением поста 13 диспетчерского управления. Блок 17 проверяет наличие правильности результатов логического контроля освобождения блок-участков по маршрутам следования поездов и подготавливает для передачи по каналу 11 цифровой радиосвязи сообщения о проследовании границ рельсовых цепей для поездов, движущихся по соответствующим маршрутам. Сообщения содержат номер поезда, которому они адресованы, номер маршрута его следования, номера занимаемых и освобождаемых рельсовых цепей и метки глобального времени этих событий из системы спутниковой навигации. Сообщения с минимальной задержкой передаются стационарным радиомодемом 12 поста 13 диспетчерского управления через канал 11 цифровой радиосвязи в бортовые радиомодемы 10 соответствующих поездов.
При приеме сообщения бортовой радиомодем 10 пересылает его через CAN интерфейс 2 в модуль 15 коррекции текущей координаты, который в свою очередь передает через CAN интерфейс 2 в модуль 6 электронной карты маршрута данные для сравнения по координатам. Эти данные включают:
- текущую координату Х местонахождения передней части поезда, которая непрерывно вычисляется модулем 6 электронной карты маршрута по данным модуля 7 измерения пройденного пути,
- текущую координату Хсн, определяемую (каждую секунду) приемником 8 системы спутниковой навигации,
- переданную через канал 11 цифровой радиосвязи координату границы очередной рельсовой цепи Хрц,
- координату границы этой же рельсовой цепи из внутренней базы данных модуля 6 электронной карты маршрута.
Модуль 15 через шестой порт считывает из базы данных (блока 16 памяти) приращений длин и координат аппроксимирующих отрезков пути математической модели маршрута движения поезда, записанные в ней приращения координат dXi.
База данных содержит математическую модель маршрута движения поезда в виде таблицы, в которой текущий маршрут движения поезда разделен на отрезки, каждому из которых соответствует запись, включающая значение индекса i, значение приращения координаты местоположения dXi и значение соответстствующего приращения длины маршрута dLi. Длина отрезков выбрана равной 1 м, из компромиссного условия достижения необходимой точности, при разумном расходе ресурса электронной памяти и вычислительной мощности. Эта таблица в иной форме дублирует информацию, записанную во внутренней базе данных модуля 6 электронной карты маршрута.
Сопоставление данных из независимых источников и результатов вычислений, производимых по разным алгоритмам, обеспечивает повышение уровня достоверности контроля и, следовательно, безопасности движения поездов.
Если данные из канала 11 цифровой радиосвязи приходят с задержкой по отношению к содержащейся в них метке Т глобального времени, то модуль 15 сравнивает с ними координаты местонахождения поезда, относящиеся к моменту времени Т, указанному в метке времени. Модуль 15 использует разницу между текущей и расчетной координатами (на момент времени Т) для корректировки текущей координаты в данный момент времени. Если задержка не превышает 10 секунд, то эта интерполяция не вносит существенной погрешности. Если задержка более 10 секунд, то данные устаревают и не учитываются модулем 15.
Модуль 15 суммированием приращений координат dXi, начиная от i=0, находит первый индекс i=j, для которого ∑(dXi)>=Хрц. После этого, при обнаружении некоторого расхождения между текущей координатой Х по электронной карте маршрута и Хрц1, модуль 15 выполняет первую коррекцию, устанавливая Х=Хрц1.
Далее модуль 15, суммированием приращений длин dLi, из базы данных аппроксимирующих отрезков, начиная от i=j, находит первый индекс i=k, для которого ∑(dLi)>=Lпоезда. Параметр L поезда модуль 15 получает через четвертый порт и CAN интерфейс 2 из модуля 9 памяти длины поезда. Длина поезда в модуль 9 памяти длины поезда вводится во время конфигурации системы перед каждой новой поездкой.
Затем суммированием Хрц и приращений координат dXi, из базы данных аппроксимирующих отрезков, начиная от i=j до i=k, рассчитывает прогнозируемую координату Хрц2=Хрц1+∑(dXi) положения начала поезда в момент получения сигнала проследования границы рельсовой цепи хвостом поезда.
Далее модуль 15 ожидает получения сообщения о проследовании границы данной рельсовой цепи концом поезда. Это сообщение блок 17 посылает при получении им данных об освобождении предыдущей рельсовой цепи.
За время движения поезда по данной рельсовой цепи модуль 15 при необходимости еще раз корректирует текущую координату X, непрерывно вычисляемую модулем 6 электронной карты маршрута, путем осуществления приравнивания Х=Хрц2.
Если модулем 15 обнаружено аномально большое несоответствие всех четырех данных Хсн, X, Хрц1, Хрц2, то на выходе модуля 15 формируется команда выключения модуля 6 электронной карты маршрута через порт управления. При этом происходит временный переход на работу системы без использования режима отслеживания местоположения поезда по электронной карте маршрута. Подсистема контроля безопасности движения 5 переключается на режим движения поезда только по сигналам АЛС-ЕН и/или АЛСН до восстановления нормальной работы соответствующих модулей системы.
Предлагаемая система управления движением поезда повышает достоверность и точность в определении текущей координаты местонахождения поезда и обеспечивает более надежное функционирование аппаратуры в оптимальном режиме управления движением поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446070C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| Способ интервального регулирования движения поездов и система для его реализации | 2018 |
|
RU2693357C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446071C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики, а именно к системам управления движением поездов, и может быть использовано для повышения достоверности определения местоположения поезда на маршруте движения. Система содержит в кабине управления поездом соединенные через CAN интерфейс подсистему автоведения, подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, состоящую из подключенных к CAN интерфейсу модуля электронной карты маршрута, модуля измерения пройденного пути, приемника системы спутниковой навигации, модуля памяти длины поезда и бортового радиомодема, соединенного через канал цифровой радиосвязи со стационарным радиомодемом поста диспетчерского управления, оборудованного устройством электрической централизации стрелок и сигналов и контроля рельсовых цепей. В подсистеме контроля безопасности движения модуль коррекции текущей координаты через CAN интерфейс соединен с портами модуля электронной карты маршрута, модуля измерения пройденного пути, приемника системы спутниковой навигации, модуля памяти длины поезда и бортового радиомодема. Модуль коррекции текущей координаты соединен с блоком памяти. Выход модуля коррекции текущей координаты соединен с портом управления модуля электронной карты маршрута. Устройство электрической централизации стрелок и сигналов и контроля рельсовых цепей соединено с портом стационарного радиомодема поста диспетчерского управления через блок контроля последовательностей занятия и освобождения рельсовых цепей по маршрутам движения поездов. Достигается повышение надежности работы в режиме управления движением поезда по электронной карте маршрута. 2 ил.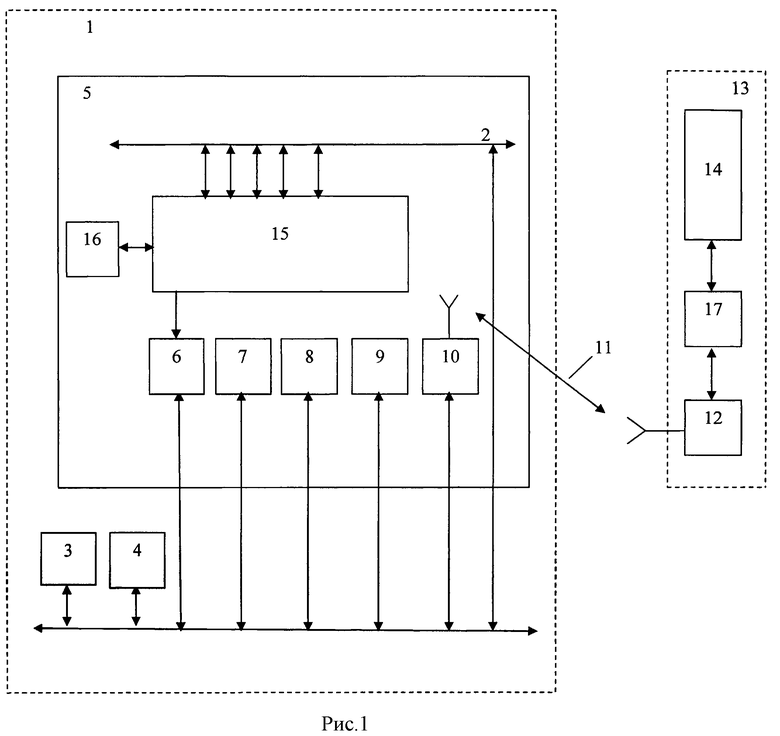
Система управления движением поезда, содержащая в кабине управления поездом соединенные через CAN интерфейс подсистему автоведения, подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, состоящую из подключенных к CAN интерфейсу модуля электронной карты маршрута, модуля измерения пройденного пути, приемника системы спутниковой навигации, модуля памяти длины поезда и бортового радиомодема, соединенного через канал цифровой радиосвязи со стационарным радиомодемом поста диспетчерского управления, оборудованного устройством электрической централизации стрелок и сигналов и контроля рельсовых цепей, отличающаяся тем, что в подсистему контроля безопасности движения введен модуль коррекции текущей координаты, который через CAN интерфейс своими первым, вторым, третьим, четвертым и пятым портами соединен соответственно с портами модуля электронной карты маршрута, модуля измерения пройденного пути, приемника системы спутниковой навигации, модуля памяти длины поезда и бортового радиомодема, шестой порт модуля коррекции текущей координаты соединен с блоком памяти, содержащим базу данных приращений длин и координат аппроксимирующих отрезков пути математической модели маршрута движения поезда, выход модуля коррекции текущей координаты соединен с портом управления модуля электронной карты маршрута, а устройство электрической централизации стрелок и сигналов и контроля рельсовых цепей соединено с портом стационарного радиомодема поста диспетчерского управления через блок контроля последовательностей занятия и освобождения рельсовых цепей по маршрутам движения поездов.
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| Дозатор для сиропа | 1951 |
|
SU94943A1 |
| JP 2009280126 A, 03.12.2009 | |||
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| ЯКОРЬ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА | 0 |
|
SU166401A1 |

