Группа изобретений относится к локомотивным устройствам управления движением и обеспечения безопасности движения тягового подвижного состава и может быть использована на тяговом подвижном составе железнодорожного транспорта, преимущественно на участках сети железных дорог с предельным заполнением их расчетной пропускной способности.
Известно комплексное локомотивное устройство безопасности КЛУБ-У (RU 2248899 С1, МПК7: B61L 25/04), посредством которого осуществляют контроль непревышения допустимой скорости движения поезда, расшифровку сигналов АЛСН и координатную привязку через спутниковую навигационную систему GPS.
Основными недостатками данного устройства являются отсутствие у него функциональной возможности управления тягой и служебным торможением локомотива и использование даже при незначительном, не представляющем угрозу для безопасности движения превышении скорости в качестве единственного управляющего воздействия автостопного (экстренного) торможения, самого по себе являющегося мощным негативным фактором, вызывающим нарушение безопасности движения поезда (заклинивание и образование ползунов колесных пар, выдавливание и сход вагонов, травмирование пассажиров и др.). Кроме того, точность координатной привязки, выполняемой устройством КЛУБ-У с помощью спутниковой навигационной системы GPS, составляющая величину около 30 м, явно недостаточна для обеспечения безопасного движения поезда на станции, где происходит подавляющее большинство статистически устойчивых нарушений безопасности движения в поездной и маневровой работе, в том числе по причине неточного определения местонахождения подвижного состава.
Известно устройство для автоматического управления торможением поезда (RU 2283786, МПК: В60Т 8/172 (2006.01), B61L 3/12 (2006.01), позволяющее осуществлять автоматический выбор и корректировку алгоритма управления служебным торможением поезда (расчет и реализацию тормозной траектории с определением фактического тормозного коэффициента) для обеспечения заданной величины снижения скорости на заданном тормозном пути или прицельной остановки у запрещающего сигнала с учетом фактических условий движения (массы поезда, скорости движения, профиля пути и др.).
В указанном устройстве отсутствует функциональная возможность управления тягой локомотива. Работа локомотивного оборудования напрямую зависит от наличия, количества и исправности напольных устройств. Система имеет относительно низкую устойчивость к сбоям локомотивной микропроцессорной аппаратуры.
Известна система управления движением пассажирского электровоза (УСАВП) (RU 2273567 С1, МПК: B60L 15/40 (2006.01), B61L 3/20 (2006.01), осуществляющая расчет энергооптимального режима движения поезда по пути следования, выработку сигналов на управление тягой локомотива и торможением поезда, чем обеспечиваются реализация установленной скорости движения исходя из условий выполнения расписания при минимизации энергозатрат на тяговые нужды, установленной скорости подъезда к местам ограничения скорости, светофорам, требующим снижения скорости, а также остановка поезда служебным торможением перед светофором с запрещающим сигналом. Кроме того, в УСАВП реализована автоматическая цифровая регистрация параметров работы локомотива и движения поезда на съемном энергонезависимом носителе информации, обеспечивающая возможность послерейсовой обработки записи и анализа режимов ведения поезда как машинистом, так и системой автоведения.
Недостатком системы УСАВП является, также как и в КЛУБ, недостаточная точность определения местонахождения поезда, особенно на станции, а также зависимость от работы других локомотивных систем при дешифрации сигналов АЛСН.
Наиболее близким аналогом для ЕКС является европейская система управления и обеспечения безопасности движения поездов ERTMS/ETCS (Э.Вояновски. Испытания новых систем управления движением поездов в рамках проекта ERTMS, «Железные дороги мира», №12, 1998 г.), основанная на непрерывной и точечной передаче данных между напольными устройствами и поездом, модульной архитектуре бортового компьютера и интеллектуальных датчиках, которые позволяют поезду определять свое местоположение на линии с высокой точностью. В данной системе предусмотрено три уровня, позволяющих реализовать различные эксплуатационные программы в зависимости от степени оснащенности линии напольным оборудованием. Система уровня 1 обеспечивает регулирование скорости поезда в зависимости от передаваемых с пути на поезд данных, сформированных на основе показаний напольных сигналов. Система уровня 2 представляет собой законченную систему управления и обеспечения безопасности движения поездов без использования напольных сигналов, но с сохранением жесткого разделения линии на блок-участки. Напольные устройства определяют местоположение поездов и контролируют их полносоставность. Система уровня 3 - это законченная система управления и обеспечения безопасности движения поездов без использования напольных сигналов и с подвижными блок-участками. Определение местоположения поезда и контроль его полносоставности осуществляются бортовыми средствами.
Эти три уровня совместимы друг с другом как в функциональном, так и в техническом отношении, то есть поезд, оборудованный системой верхнего уровня, может обращаться на линии, оборудованной системой более низкого уровня. Система уровня 1 или 2 может быть доведена до уровня 3 путем добавления модулей расширения. При этом для реализации уровней 2 и 3 организуются специальные соединения по радиоканалам между поездом и напольным оборудованием, в частности, с использованием стандарта сотовой связи GSM.
Основными недостатками системы ERTMS/ETCS являются:
- избыточность аппаратных средств, заключающаяся в необходимости оснащения как загруженных, так и малодеятельных участков пути большим количеством (у каждого светофора) напольных приемопередающих и измерительных устройств для обеспечения надежного непрерывного двустороннего обмена цифровой информации между ними и поездами;
- сложная инфраструктура железной дороги, заключающаяся в необходимости строительства центров блокировки на базе радиосвязи для регулирования интервалов попутного следования поездов при помощи контролируемых по радио стационарных и подвижных блок-участков;
- сложность функциональной схемы, заключающаяся в необходимости использования в системе специального модуля передачи для обеспечения совместимости работы точечной и непрерывной АЛС.
Отмеченные недостатки обусловливают несовместимость системы ERTMS/ETCS с имеющейся инфраструктурой Российских железных дорог, адаптация которой потребует больших затрат и, следовательно, практическую невозможность использования этой системы в условиях большой протяженности сети.
Задачей группы изобретений является повышение эффективности и уровня безопасности железнодорожных перевозок.
Решение указанной задачи достигается тем, что в способе управления и обеспечения безопасности движения, основанном на синхронном сравнении фактически измеренной скорости движения поезда с заданным пороговым значением допускаемой скорости для данной координаты местонахождения поезда тремя функционально независимыми подсистемами (автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения) с выполнением каждой из подсистем управляющих действий по снижению скорости движения при достижении скоростью движения поезда заданного значения для каждой из подсистем, в отличие от прототипа пороговые значения допускаемых скоростей для каждой подсистемы задаются из условий:
V1<V2<V3<VB≤VП,
где:
V1 - пороговое значение допускаемой скорости для подсистемы автоведения поезда;
V2 - пороговое значение допускаемой скорости для подсистемы автоматического управления служебным торможением;
V3 - пороговое значение допускаемой скорости для подсистемы контроля безопасности движения;
VB, VП - установленные для данной координаты местонахождения поезда предельные значения допускаемой скорости движения поезда, соответственно, по временным (включая показания светофоров) и постоянным ограничениям,
при этом
V2≥V1+ΔV1+ΔV2;
V3≥V2+ΔV2+ΔV3,
где ΔV1, ΔV2, ΔV3 - соответственно, значения погрешности измерения текущей скорости движения поезда подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения.
Для реализации способа в единой комплексной системе управления и обеспечения безопасности движения тягового подвижного состава (ЕКС), включающей подсистемы автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, а также отдельные функциональные блоки, включающие систему датчиков пути и скорости движения, приемные устройства автоматической локомотивной сигнализации и спутниковой навигационной системы, устройство выявления неисправностей оборудования локомотива, систему датчиков давления в основных агрегатах пневматической тормозной системы локомотива, устройство контроля бодрствования машиниста, устройство визуализации информации машинисту и устройство регистрации информации о работе локомотивного оборудования и поездной ситуации с энергонезависимой памятью, в отличие от прототипа подсистемы и функциональные блоки соединены параллельно общесистемным CAN-интерфейсом. При этом каждая подсистема снабжена электронной базой данных собственных пороговых значений допускаемой скорости по координате движения поезда, а устройство контроля бодрствования машиниста выполнено интерактивным с узлами физиологического контроля и регистрации управляющих действий машиниста по ведению поезда с возможностью воздействия управляющим выходом через общесистемный CAN-интерфейс на подсистему автоматического управления служебным торможением.
Объединение в основе ЕКС подсистем автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения (УСАВП, САУТ и КЛУБ) позволяет при совместной интегрированной работе в полной мере компенсировать указанные выше недостатки этих систем, проявляющиеся при их автономной работе на локомотиве.
На чертеже представлена принципиальная схема ЕКС.
ЕКС включает подсистему автоведения поезда 1, в качестве которой может быть использована, например, унифицированная система УСАВП, подсистему автоматического управления служебным торможением 2, в качестве которой может быть использована, например, система САУТ-ЦМ, подсистему контроля безопасности движения 3, в качестве которой может быть использовано, например, локомотивное устройство КЛУБ-У, устройство выявления неисправностей (УВН) 4, интерактивное устройство интеллектуального контроля бодрствования машиниста 5, включающее узел физиологического контроля (УФК) 6, в качестве которого может быть использована, например, телемеханическая система контроля бодрствования машиниста (ТСКБМ), и узел регистрации управляющих действий машиниста по ведению поезда (УРУ) 7, два интерактивных устройства визуализации информации 8, по одному в каждой кабине машиниста, каждое из которых содержит цветной графический дисплей ГДМ и устройство отображения и безопасного ручного ввода ответственной информации БИЛ-ЕКС, общесистемный высокоскоростной CAN-интерфейс (CAN-250) 9, объединяющий все подсистемы, устройства и блоки системы ЕКС и обеспечивающий обмен между ними цифровой информации и передачу управляющих команд, устройство регистрации (УР) 10 в реальном времени всей цифровой информации, циркулирующей в CAN-интерфейсе, на энергонезависимый носитель УР. В качестве УР может быть использован, например, регистратор параметров движения поезда (РПДА). ЕКС также включает систему датчиков пути и скорости движения (ДПС) 11, приемное устройство автоматической локомотивной сигнализации (ПУ АЛС) 12, приемное устройство спутниковой навигационной системы (ПУ СНС) 13, систему датчиков давления (ДД) 14 в основных агрегатах пневматической тормозной системы локомотива.
ЕКС работает следующим образом.
В процессе движения поезда в общесистемный CAN-интерфейс 9 непрерывно поступают данные от датчиков ДПС 11. При поступлении этих данных в подсистемах автоведения поезда 1, автоматического управления служебным торможением 2 и контроля безопасности движения 3 определяется фактическая скорость движения, а также путь, пройденный с момента начала движения, на основании чего производится координатная привязка к заложенной в подсистемы 1-3 электронной карте участка движения, и определяется текущая координата нахождения поезда. С помощью ПУ СНС 13 проводится дополнительное уточнение координаты нахождения поезда. В систему также поступают непрерывно данные от ДД 14 и ПУ АЛС 12, на основании которых системой выбираются режимы управления поездом. Каждая из подсистем 1-3 производит анализ входящей информации, обработку в соответствии с заложенными алгоритмами и выработку управляющих воздействий на тормозные устройства локомотива и его тяговое оборудование. Алгоритмы работы подсистем согласованы таким образом, что исключена одновременная передача управляющих команд от различных подсистем. Команды на управление тяговым током (набор и сброс позиций главного контроллера) выдает только подсистема автоведения поезда 1. При необходимости снижения скорости торможением, например, при достижении предельно допустимого значения скорости, подсистема автоведения поезда инициирует управляющее воздействие на локомотивную тормозную систему, осуществляющую служебное торможение. При отказе системы автоведения в осуществлении такого воздействия, управление служебным торможением перехватывается подсистемой автоматического управления служебным торможением 2. При недостаточной эффективности служебного торможения процесс управления торможением перехватывается подсистемой контроля безопасности движения 3, в результате управляющего воздействия которой снимается напряжение с катушек ЭПК и инициируется экстренное торможение поезда. Информация, необходимая машинисту для ведения поезда, отображается машинисту посредством интерактивного устройства визуализации информации 8. В процессе работы системы автоматически осуществляется выявление опасных неисправностей тягового, тормозного и вспомогательного оборудования локомотива, железнодорожного пути и устройств интервального регулирования, которые могут привести к нарушениям безопасности движения. УВН информирует машиниста путем выдачи сообщений на ГДМ о наступлении неисправностей или режимов работы оборудования, угрожающих безопасности движения поезда, на основании чего машинист может своевременно принять меры по предотвращению негативных последствий. Устройство интеллектуального контроля бодрствования производит физиологический контроль бодрствования машиниста с помощью УФК 6, контролирующего уровень кожно-гальванической реакции машиниста (КГР), а также с помощью УРУ 7 контролирует наличие управляющих действий машиниста по ведению поезда, к которым, например, относятся управление рукояткой контроллера, краном машиниста, подача песка, звукового сигнала. При снижении уровня КГР, но активных действиях по управлению поездом, а также при отсутствии действий, но высоком уровне КГР, система не выдает запросов на подтверждение бодрствования. В случае низкого уровня КГР и отсутствии управляющих действий система выдает запрос на подтверждение бодрствования, при отсутствии ответной реакции на этот запрос - инициирует служебное торможение поезда.
В ЕКС взаимная координация работы подсистем автоведения 1, автоматического управления служебным торможением 2 и контроля безопасности движения 3 обеспечивается разнесением установочных пороговых значений допускаемой скорости движения поезда по постоянным VП и временным VВ ограничениям. Так, построение баз данных предусматривает разнесение пороговых значений их допускаемых скоростей таким образом, что для каждой координаты движения поезда выполняется следующее соотношение:
V1<V2<V3<VВ≤VП,
где:
V1 - пороговое значение допускаемой скорости в подсистеме автоведения, формируемое по базе данных этой подсистемы с учетом постоянных, временных ограничений скорости, а также с учетом ограничений скорости по не зеленым показаниям АЛС и ограничений скорости, соответствующим текущим координатам траекторий разгона или торможения, которые выстраиваются подсистемой при переходе с одной допускаемой скорости на другую или при осуществлении прицельной остановки;
V2 - пороговое значение допускаемой скорости в подсистеме автоматического управления служебным торможением, формируемое по базе данных этой подсистемы с учетом постоянных ограничений скорости, а также с учетом ограничений скорости по не зеленым показаниям АЛС и ограничений скорости, соответствующим текущим координатам траекторий торможения, которые выстраиваются подсистемой при переходе с одной допускаемой скорости на другую или при осуществлении прицельной остановки;
V3 - пороговое значение допускаемой скорости в подсистеме контроля безопасности движения, формируемое по базе данных этой подсистемы с учетом постоянных ограничений скорости, а также с учетом ограничений скорости по не зеленым показаниям АЛС и ограничений скорости, соответствующим текущим координатам траектории торможения, которая выстраивается подсистемой при переходе с одной допускаемой скорости на другую или при осуществлении остановки.
VВ, VП - установленные для данной координаты местонахождения поезда предельные значения допускаемой скорости движения поезда, соответственно, по временным и постоянным ограничениям, включая ограничения скорости по показаниям светофоров.
При этом
V2≥V1+ΔV1+ΔV2;
V3≥V2+ΔV2+ΔV3,
где ΔV1, ΔV2, ΔV3 - соответственно, значения погрешности измерения текущей скорости движения поезда подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения поезда.
При практической реализации ЕКС установлены следующие зависимости пороговых значений допускаемых скоростей:
V2=V1+2 км/ч;
V3=V1+5 км/ч.
Заявленные соотношения справедливы как при движении с поддержанием постоянной скорости, так и при переходе с одной скорости на другую, включая скорость торможения. Таким образом, при исправной работе всех подсистем ЕКС обеспечивает независимое построение траекторий допускаемых скоростей во всех режимах движения поезда. Так, при исправной работе подсистем 1-3 востребованным является то значение допускаемой скорости, которое является наименьшим, то есть V1. Пока исправная подсистема 1 обеспечивает непревышение допускаемой скорости движения, ЕКС не воспринимает посредством других подсистем повышение скорости, следовательно, состояния опасного отказа не возникает.
Поскольку подсистемы с позиций непревышения допускаемой скорости работают независимо, то данное рассуждение остается в силе и по отношению к другим подсистемам. Например, если при исправной работе подсистемы автоматического управления служебным торможением 2 откажут подсистемы 1 и 3, непревышение допускаемой скорости будет обеспечиваться именно этой подсистемой.
Возможность возникновения в ЕКС опасного отказа по превышению допускаемой скорости движения вероятна только в том случае, когда в течение рассматриваемого интервала времени в любой последовательности произошел отказ всех трех подсистем. Поскольку вероятность такого события равна вероятности одновременного наступления трех событий, то есть произведению вероятностей наступления каждого из них, то она существенно меньше наименьшего из этих значений, каковым является значение вероятности отказа подсистемы контроля безопасности.
Кроме того, случай опасного события, заключающегося в пропуске какой-либо подсистемой защитного отказа по пороговому значению допускаемой скорости и ухода этой подсистемы в опасный отказ (например, для устройства КЛУБ-Ус интенсивностью λ=10-11 1/ч), останется для ЕКС незамеченным при работающих исправно двух других подсистемах (или любой из них), что достигается путем контроля ЕКС пороговых значений допускаемых скоростей для каждой из подсистем согласно соотношению, заявленному в формуле изобретения.
ЕКС реализует принцип единства управления и обеспечения безопасности движения и строится на базе объединения на программно-интерфейсном уровне трех функционально независимых, но взаимно скоординированных по условиям формирования ими управляющих воздействий: подсистемы автоведения поезда, подсистемы автоматического управления служебным торможением и подсистемы контроля безопасности движения.
Реализация заявленной совокупности признаков формулы обеспечивает достижение ряда технических результатов: безопасное повышение технической скорости движения поездов, что способствует увеличению степени использования пропускной способности загруженных участков сети железных дорог с обеспечением точного выполнения графика движения, при необходимости энергооптимального нагона в рамках допускаемых значений скорости, при одновременном безопасном выполнении системой самодиагностики и интеллектуального контроля бодрствования машиниста.
Таким образом, достигается решение задачи, поставленной перед изобретением: повышение эффективности и уровня безопасности железнодорожных перевозок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510346C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2010 |
|
RU2429152C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446071C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| Способ управления и диагностики тормозной системой поезда с применением технологии цифрового двойника и устройство для его реализации | 2022 |
|
RU2820579C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446070C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА, МАНЕВРОВОГО СОСТАВА ИЛИ ОДИНОЧНОГО ЛОКОМОТИВА ПО СТАНЦИИ И НА ПОДХОДАХ К НЕЙ | 2007 |
|
RU2352487C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519317C1 |
Группа изобретений может быть использована на тяговом подвижном составе железнодорожного транспорта, преимущественно на участках сети железных дорог с предельным заполнением их расчетной пропускной способности. В способе осуществляют контроль скорости движения поезда функционально независимыми подсистемами автоведения поезда (1), автоматического управления служебным торможением (2) и контроля безопасности движения (3), синхронное сравнение текущей скорости движения поезда с пороговым значением допускаемой скорости для данной координаты местонахождения поезда и перевод подсистемы в управляющий режим снижения скорости при достижении ею порогового значения допускаемой скорости, заданного по зависимости, изложенной в формуле. В единой комплексной системе управления и обеспечения безопасности движения тягового подвижного состава (ЕКС) независимые подсистемы соединены общесистемным CAN-интерфейсом (9) и снабжены электронной базой данных собственных пороговых значений допускаемой скорости для данной координаты движения поезда, рассчитанной в соотношении с другими подсистемами. Устройство контроля бодрствования машиниста (5) выполнено интерактивным с узлами физиологического контроля и контроля управляющих действий машиниста по ведению поезда с возможностью воздействия через общесистемный CAN-интерфейс на подсистему автоматического управления служебным торможением. Изобретение обеспечивает повышение эффективности и уровня безопасности железнодорожных перевозок. 2 н.п. ф-лы, 1 ил.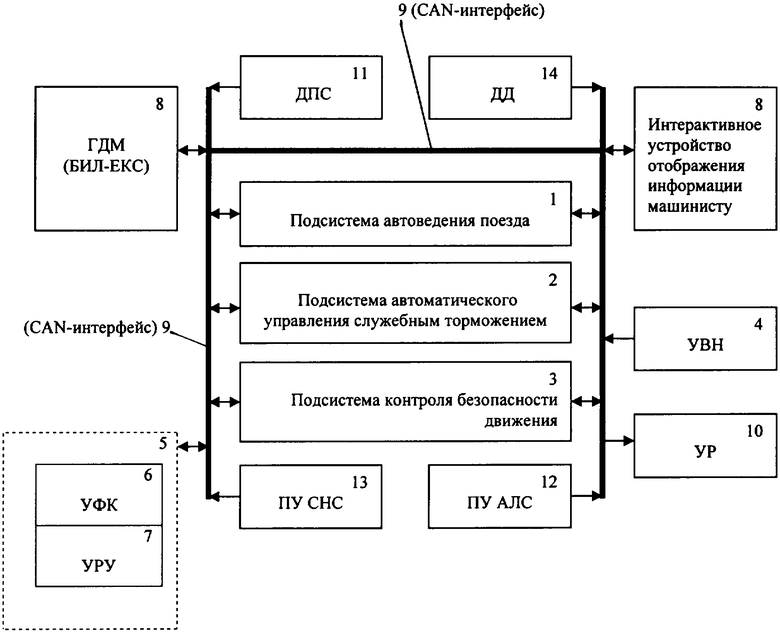
1. Способ управления и обеспечения безопасности движения тягового подвижного состава, включающий контроль скорости движения функционально независимыми подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, синхронное сравнение измеряемой текущей скорости движения поезда с заданным для данной координаты местонахождения поезда пороговым значением допускаемой скорости для каждой из подсистем и при достижении скоростью движения поезда заданного значения перевод подсистемы в управляющий режим по снижению скорости, отличающийся тем, что пороговые значения допускаемой скорости для каждой подсистемы задают из условий:
V1<V2<V3<VB≤VП,
где V1 - пороговое значение допускаемой скорости для подсистемы автоведения поезда;
V2 - пороговое значение допускаемой скорости для подсистемы автоматического управления служебным торможением;
V3 - пороговое значение допускаемой скорости для подсистемы контроля безопасности движения;
VВ, VП - установленные для данной координаты местонахождения поезда предельные значения допускаемой скорости движения поезда соответственно по временным и постоянным ограничениям, включая ограничения скорости по показаниям светофоров,
при этом V2≥V1+ΔV1+ΔV2;
V3≥V2+ΔV2+ΔV3, где ΔV1, ΔV2, ΔV3 - соответственно значения погрешности измерения текущей скорости движения поезда подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения.
2. Единая комплексная система управления и обеспечения безопасности движения тягового подвижного состава (ЕКС), включающая подсистемы автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, а также отдельные функциональные блоки, включающие систему датчиков пути и скорости движения, приемные устройства автоматической локомотивной сигнализации и спутниковой навигационной системы, устройство выявления неисправностей оборудования локомотива, систему датчиков давления в основных агрегатах пневматической тормозной системы локомотива, устройство контроля бодрствования машиниста, устройство визуализации информации машинисту и устройство регистрации информации с энергонезависимой памятью, отличающаяся тем, что подсистемы и функциональные блоки соединены общесистемным CAN-интерфейсом, при этом каждая подсистема снабжена электронной базой данных собственных пороговых значений допускаемой скорости по координате движения поезда, а устройство контроля бодрствования машиниста выполнено интерактивным с узлами физиологического контроля и контроля управляющих действий машиниста по ведению поезда с возможностью воздействия через общесистемный CAN-интерфейс на подсистему автоматического управления служебным торможением.
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТЯГОВЫМ ПОДВИЖНЫМ СОСТАВОМ | 2003 |
|
RU2254256C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2249525C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| Полевой заправочный модуль на 4 точки заправки (ПЗМ- 4) | 2023 |
|
RU2821600C1 |

