Настоящее изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к системам визуализации и способам отображения трехмерного ультразвукового изображения в требуемой ориентации просмотра.
С появлением трехмерной визуализации ультразвуковых данных высокого разрешения наблюдается продолжение усовершенствования диагностических применений ультразвука с улучшенной трехмерной визуализацией и повышенной возможностью для идентификации признаков ткани, которые трудно распознать в традиционных процедурах двухмерного сканирования. Тем не менее, простота и эффективность определенных применений трехмерного ультразвука все еще требуют усовершенствования. Например, матери, которые желают видеть трехмерное изображение лица своего ребенка, возлагают на повседневные акушерские ультразвуковые исследования ожидание при возрастающей важности. Попытки генерировать это изображение необходимы с деловой точки зрения для многих клиницистов, пациенты которых уйдут в другое место, если услуга не доступна. К сожалению, получение хорошего качества при трехмерной визуализации лица ребенка может быть бесполезным и затратным по времени занятием, которое также забирает то время, которое можно потратить на ультразвуковое диагностическое сканирование, обладающее более высоким клиническим значением. Таким образом, существует потребность прийти к требуемому результату визуализации как можно быстрее и сэкономить время для клинически значимого скрининга плода на предмет различных потенциальных аномалий. В более общем смысле существует необходимость в улучшенных способах отображения трехмерного ультразвукового изображения в требуемой ориентации просмотра в соответствии с настройками, которые оптимальны для просмотра в определенном применении ультразвука. Настоящее изобретение предусматривает это и большее.
В соответствии с принципами настоящего изобретения предложены способы и системы для отображения трехмерного ультразвукового изображения в требуемой ориентации просмотра. Как описано в настоящем документе далее, настоящее изобретение может включать в себя получение данных трехмерного ультразвукового изображения, содержащих анатомический признак пациента. Кроме того, фактическая ориентация анатомического признака может быть определена по отношению к зонду преобразователя или другой точке, представляющей интерес. Например, можно визуализировать плод с использованием трехмерной ультразвуковой системы и можно определять ориентацию лица плода. Настоящее изобретение дополнительно включает в себя отображение данных трехмерного ультразвукового изображения в виде визуализации анатомического признака так, что анатомический признак располагают в выбранной ориентации, которая отличается от фактической ориентации. Кроме того, визуализируемые анатомические признаки могут быть расположены в пространственной связи с моделью освещения так, что участки освещения и затенения на анатомических признаках отображают пользователю, а в некоторых вариантах осуществления в соответствии с сохраненными настройками в ультразвуковой системе.
На рисунках:
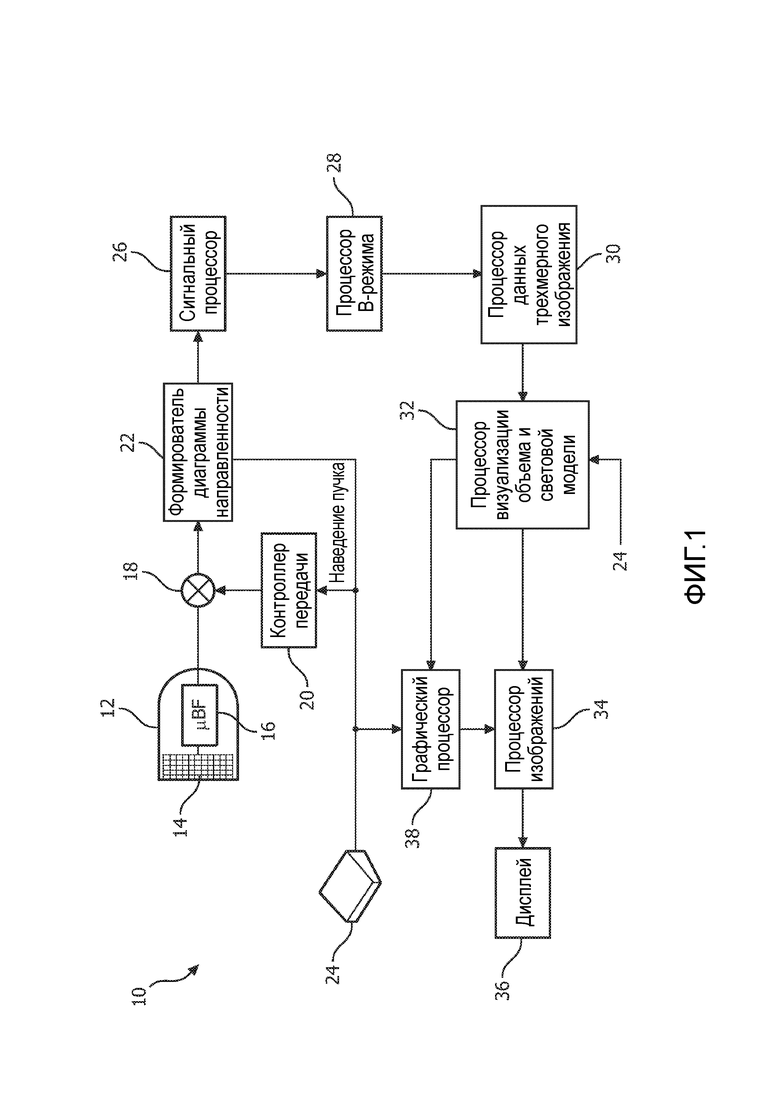
На фиг. 1 в форме блочной диаграммы проиллюстрировано использование трехмерной ультразвуковой визуализации для того, чтобы направлять или контролировать абляцию в одном из вариантов осуществления настоящего изобретения.
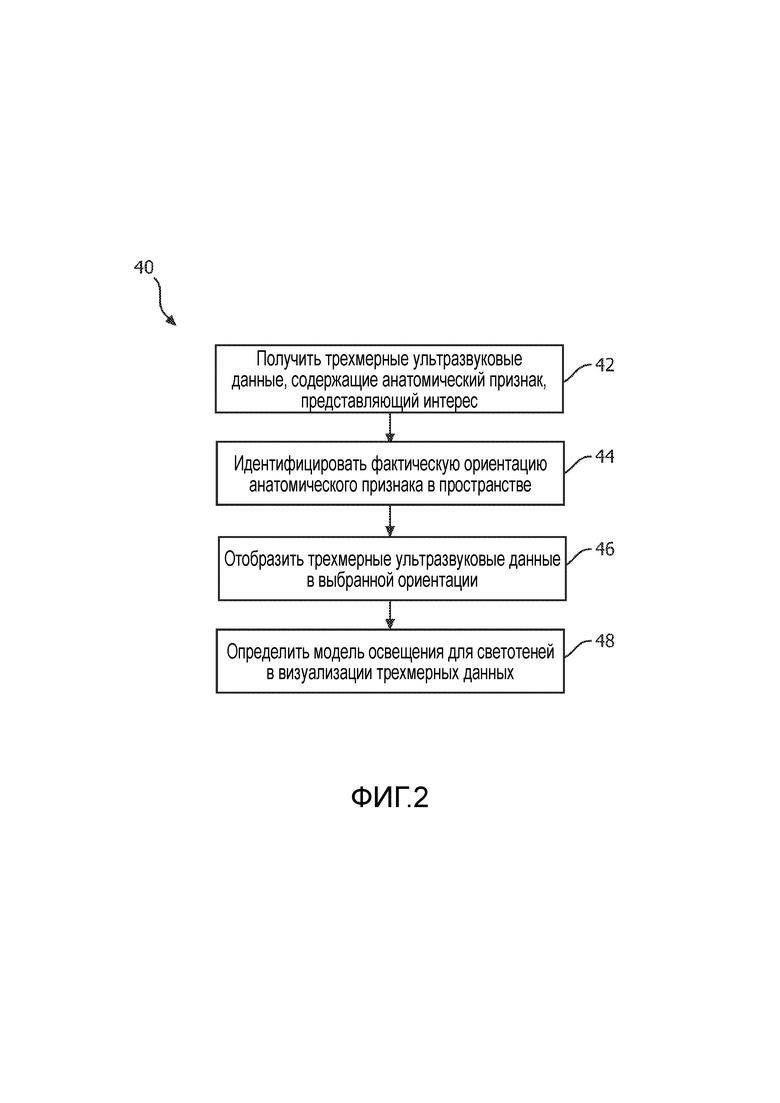
На фиг. 2 проиллюстрирована последовательность операций в соответствии с настоящим изобретением для отображения трехмерных ультразвуковых данных в выбранной ориентации.
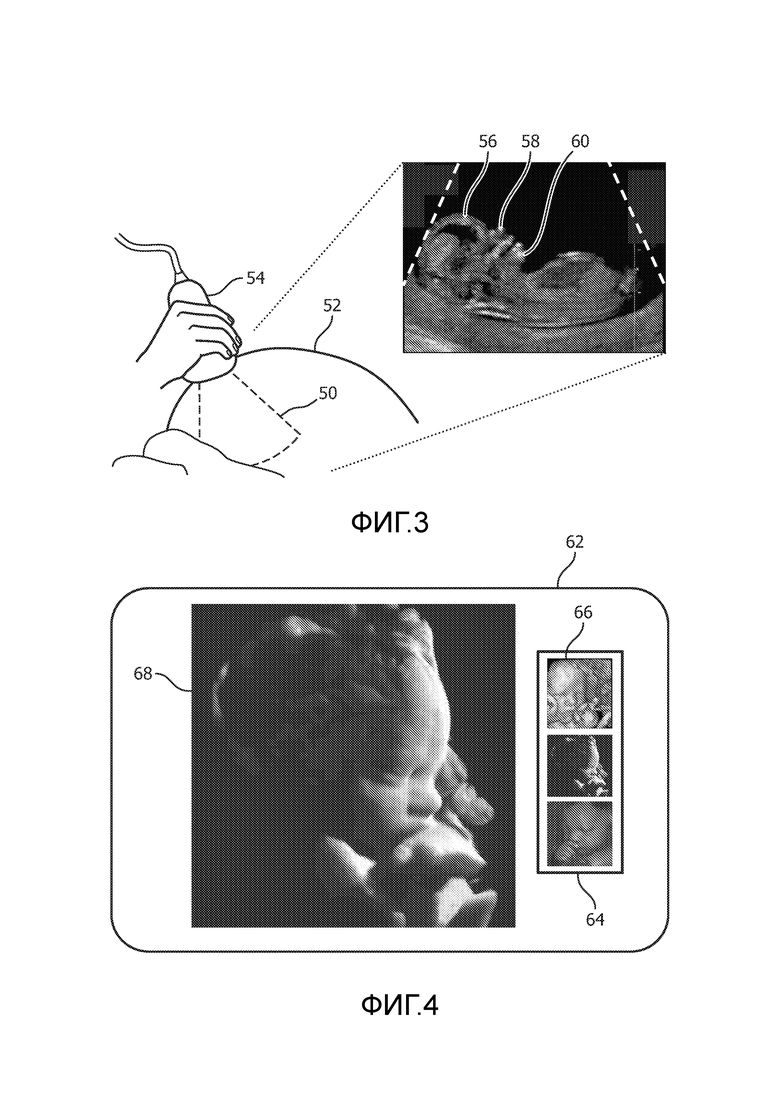
На фиг. 3 изображена примерная ультразвуковая процедура для идентификации анатомических признаков у плода для того, чтобы определять фактическую ориентацию плода в утробе матери.
На фиг. 4 проиллюстрировано отображение различных выбранных ориентаций анатомических признаков, которые могут быть сохранены в ультразвуковой системе для быстрого и воспроизводимого просмотра пользователем.
Со ссылкой на фиг. 1 в форме блочной диаграммы показана ультразвуковая система 10 визуализации, сконструированная в соответствии с принципами настоящего изобретения. В системе ультразвуковой диагностической визуализации с фиг 1 ультразвуковой зонд 12 содержит матрицу 14 преобразователей для передачи ультразвуковых волн и приема информации об эхо-сигналах. Матрица 14 преобразователей, например, может содержать двухмерную матрицу (как показано) преобразовательных элементов, способных осуществлять сканирование, как в вертикальном, так и в азимутальном направлении для двухмерной и/или трехмерной визуализации. Матрица 14 преобразователей связана с микроформирователем 16 диаграммы направленности в зонде 12, который управляет передачей и приемом сигналов посредством преобразовательных элементов в матрице. В этом примере, микроформирователь диаграммы направленности связан кабелем зонда с переключателем 18 передачи/приема (T/R), который осуществляет переключение между передачей и приемом и защищает основной формирователь 22 диаграммы направленности от посылаемых высокоэнергетических сигналов. В некоторых вариантах осуществления T/R переключатель 18 и другие элементы в системе могут входить в состав зонда преобразователя, а не в отдельную базу ультразвуковой системы. В некоторых вариантах осуществления зонд 12 может содержать все компоненты, необходимые для вывода видеосигнала, который может быть просто отображен на внешнем дисплее. Например, система может не содержать основной формирователь 22 диаграммы направленности, а вместо этого формирование диаграммы направленности может быть выполнено в зонде 12, и зонд также может содержать сигнальный процессор 26, процессор 28 B-режима и другую электронику для обработки ультразвуковых сигналов.
Как показано, передача ультразвуковых пучков от матрицы 14 преобразователей под управлением микроформирователя 16 диаграммы направленности направляется контроллером 20 передачи, соединенным с T/R переключателем 18 и формирователем 22 диаграммы направленности, который принимает ввод от операции пользователя в пользовательском интерфейсе или на панели 24 управления. Одна из функций, которыми управляет контроллер 20 передачи, представляет собой направление, в котором наводят пучки. Пучки могут быть наведены прямо вперед от (перпендикулярно) матрицы преобразователей или под различными углами для более широкого поля сканирования. В этом варианте осуществления сигналы с частично сформированной диаграммой направленности, полученные с помощью микроформирователя 16 диаграммы направленности, связаны с основным формирователем 22 диаграммы направленности, где сигналы с частично сформированной диаграммой направленности от отдельных панелей преобразовательных элементов комбинируют в сигнал с полностью сформированной диаграммой направленности. Группы смежных преобразовательных элементов, обозначаемых как «панели» или «подматрицы» как единое целое приводят в действие с помощью микроформирователя (μBF) диаграммы направленности в зонде 12. Подходящие двухмерные матрицы описаны, например, в патенте США 6419633 (Robinson et al.) и в патенте США 6368281 (Solomon et al.). МикроФормирователи диаграммы направленности описаны, например, в патентах США 5997479 (Savord et al.) и 6013032 (Savord), все они включены в настоящий документ по ссылке.
Сигналы со сформированной диаграммой направленности связаны с сигнальным процессором 26. Сигнальный процессор 26 может обрабатывать принимаемые эхо-сигналы различными способами, таким как полосовая фильтрация, прореживание, разделение компонентов I и Q и разделение гармонических сигналов. Сигнальный процессор 26 также может выполнять дополнительное улучшение сигнала, такое как уменьшение спеклов, смешивание сигналов и устранение шумов. Обработанные сигналы связаны с процессором 28 B-режима, который может использовать обнаружение амплитуды для визуализации анатомических признаков, таких как лицо ребенка, внутри матери. Сигналы, создаваемые с помощью процессора B-режима, связаны с процессором 30 данных трехмерного изображения, который выполнен с возможностью генерировать наборы данных трехмерных изображений, которые могут быть визуализировать и обработаны с помощью процессора 32 визуализации объема и световой модели. Как описано в настоящем документе далее, процессор 32 визуализации объема и световой модели может воспроизвести визуализированный анатомический признак так, что анатомический признак расположен в выбранной ориентации, которая отличается от фактической ориентации признака по отношению к зонду 12 преобразователя. Процессор 32 визуализации объема и световой модели также может располагать ориентацию анатомического признака в пространственной связи с моделью освещения так, что участки освещения и затенения на анатомическом признаке отображаются в соответствии с сохраненными настройками в ультразвуковой системе. По существу, пользователь может приводить в действие пользовательский интерфейс или панель 24 управления для того, чтобы предварительно определять сохраненные настройки в системе и тем самым генерировать желаемый пользователем вид анатомического признака наряду с оптимальным расположением освещения для генерации визуализаций анатомического признака, такого как лицо ребенка.
Способы по настоящему изобретению осуществляют с использованием ультразвуковых систем, как описано в настоящем документе. Например, ультразвуковые системы могут работать для того, чтобы осуществлять какие-либо из следующих этапов: получать данные трехмерного ультразвукового изображения, содержащие анатомический признак пациента; определять фактическую ориентацию анатомического признака в пространстве; и/или отображать данные трехмерного ультразвукового изображения в виде визуализации, содержащей анатомический признак так, что анатомический признак расположен (1) в выбранной ориентации, которая отличается от фактической ориентации и (2) в пространственной связи с моделью освещения так, что участки освещения и затенения на анатомическом признаке отображаются в соответствии с сохраненными настройками в ультразвуковой системе.
На фиг. 2 представлена блок-схема, показывающая последовательность 40 операций для реализации настоящего изобретения. Эта последовательность 40 операций начинается с этапа 42, который включает в себя получение данных трехмерного ультразвукового изображения, которые содержат по меньшей мере часть анатомического признака, представляющего интерес. Например, как описано в настоящем документе далее, трехмерную ультразвуковую систему визуализации можно использовать для того, чтобы собирать изображения плода внутри матери. Анатомические признаки, представляющие интерес, могут включать, но, не ограничиваясь этим, нос, подбородок, глаза и/или череп плода. В некоторых вариантах осуществления анатомический признак, представляющий интерес, может включать в себя по меньшей мере часть органа пациента, такого как сердце, почка или печень.
На этапе 44 ультразвуковую систему можно использовать для того, чтобы обрабатывать трехмерные ультразвуковые данные так, что фактическая ориентация анатомического признака (например, лица ребенка) может быть определена и, необязательно, отображена пользователю на экране. Этот этап включает в себя известные способы осуществления трехмерной ультразвуковой визуализации, в которых зонд передает и принимает данные эхо-сигналов от пациента, чтобы демонстрировать двухмерное или трехмерное изображение анатомической структуры пациента на дисплее. В некоторых вариантах осуществления автоматизированное обнаружение ориентации анатомического признака может быть выполнено с использованием структурного моделирования и идентификации анатомических ориентиров. В определенных вариантах осуществления настоящее изобретение может включать в себя идентификацию фактической ориентации посредством применения структурных моделей для того, чтобы определять ориентацию поверхности анатомического признака, и/или идентификацию анатомических ориентиров в анатомическом признаке.
В одном из аспектов способ определения фактической ориентации анатомического признака (например, лица плода) придерживается способов, описанных в Cuignet et al., 2013 IEEE Symposium on Biomedical Imaging, страницы 768-771, включенном в настоящий документ по ссылке. Способ определения фактической ориентации может включать, например, идентификацию анатомических признаков плода, которые являются эхогенными, независимо от положения зонда: череп, срединная сагиттальная плоскость и орбиты глаз. Череп можно обнаруживать и сегментировать с использованием модели геометрической формы и алгоритма шаблонной деформации. Таким образом, можно определять начальную анатомическую систему координат. Затем обнаружение, как срединной сагиттальной плоскости, так и орбит глаз позволяет удалять неоднозначности в ориентации и, в конечном итоге, уточнять эту систему координат.
Другие признаки также могут быть обнаружены и использованы для того, чтобы определять фактическую ориентацию. Например, можно обнаруживать лицо и другие ориентиры. Как показано на фиг. 3, плоскость 50 ультразвукового изображения, соответствующую сагиттальной плоскости, можно получать посредством традиционного сканирования матери 52 с использованием ультразвукового зонда 54. Лоб 56, нос 58 и подбородок 60 плода можно идентифицировать, например, с использованием алгоритмов, основанных на обучении, или других моделей. В некоторых вариантах осуществления другие структуры, такие как гипоталамус, конец носовой кости, небные кости и/или скуловую кость можно идентифицировать и использовать для того, чтобы определять ориентацию плода. При идентификации относительных положений различных анатомических признаков плода, фактическую ориентацию плода можно определять и, в некоторых вариантах осуществления, отображать пользователю. В отношении лица плода, например, настоящее изобретение дополнительно включает автоматическое удаление ультразвуковых данных, представляющих ткань, которая не является частью тканей лица. Это можно выполнять с помощью различных способов, например, посредством применения той же структурной модели, которую можно применять для того, чтобы ориентировать голову плода.
Как предусмотрено в настоящем документе, настоящее изобретение отчасти обеспечивает быстрый и легкий способ отображения анатомических признаков в требуемой ориентации без затратного по времени взаимодействия с сонографистом во время сканирования. Например, вместо отображения изображения анатомического признака в фактической ориентации по отношению к зонду этап 46 последовательности 40 операций включает в себя отображение трехмерных ультразвуковых данных, содержащих анатомический признак, в выбранной ориентации, которая отличается от фактической ориентации. Например, сонографист может визуализировать плод так, что лицо плода фактически ориентировано непосредственно смотрящим на зонд преобразователя. Однако для более хорошего просмотра признаков лица плода, сонографист может желать, чтобы изображение отображалось в другой выбранной ориентации, в которой лицо плода находится под углом к зонду преобразователя. Кроме того, как показано на этапе 48, может быть использована модель освещения для добавления аспектов затенения и/или освещения для трехмерных визуализированных ультразвуковых данных, отображаемых сонографисту. В некоторых вариантах осуществления модель освещения может содержать один или более источников света, которые расположены в трехмерном пространстве по отношению к визуализируемому трехмерному объему анатомического признака, например, плода. Источники света в модели освещения пользователь может располагать вручную или они могут быть включены в стандартный набор положений, которые обеспечивают оптимальные освещение и затенение для конкретной ориентации трехмерного визуализируемого ультразвукового объема. В определенных вариантах осуществления пользователь может настраивать относительные интенсивности освещения и затенение после отображения данных трехмерного ультразвукового изображения. Кроме того, выбранная ориентация анатомических признаков, а также модели освещения, можно сохранять в системе для последующего использования и обращения.
Как описано в настоящем документе, настоящее изобретение включает отображение данных трехмерного ультразвукового изображения в качестве визуализации, которая содержит анатомический признак, представляющий интерес. В определенных вариантах осуществления анатомический признак располагают в выбранной ориентации, которая отличается от фактической ориентации, например, с помощью процессора визуализации объема и модели освещения на фиг. 1. Анатомический признак также может быть расположен в пространственной связи с моделью освещения так, что участки освещения и затенения анатомического признака отображаются в соответствии с сохраненными настройками в ультразвуковой системе. В некоторых вариантах осуществления сохраненные настройки для расположения и детали модели освещения могут быть сгенерированы посредством выбора пользователем выбранной ориентации из множества отображаемых ориентаций просмотра. Кроме того, можно конфигурировать сохраненную настройку, подлежащую использованию для множества последовательных ультразвуковых сканирований. Например, одну и ту же выбранную ориентацию можно использовать для последовательных сканирований пациента так, что каждое ультразвуковое изображение лица ребенка имеет одну и ту же ориентацию и одну и ту же модель освещения для различных пациентов. Этот аспект может усовершенствовать пропускную способность, например, с использованием процедур сканирования, так что сонографист не должен тратить время на ориентацию визуализации и освещения. Вместо этого система по настоящему изобретению имеет сохраненные настройки, которые может выбирать пользователь, который инициирует эти этапы автоматически.
На фиг. 4 проиллюстрирован вариант осуществления настоящего изобретения, в котором ультразвуковая система содержит три сохраненные настройки, которые показывают выбранные ориентации лица ребенка, воспроизведенного в трех измерениях и имеющего различные модели освещения, чтобы выделять определенные признаки лица ребенка. Дисплей 62, например, содержит три изображения 64 предварительного просмотра, которые в режиме реального времени показывают визуализации данных трехмерного ультразвукового изображения, получаемые для лица ребенка. Каждую из выбранных ориентаций 66 лица ребенка можно отображать пользователю и пользователь может выбирать требуемую ориентацию из трех. После выбора, например, с использованием ввода чувствительного к прикосновениям экрана, мыши или другого устройства ввода, выбранную ориентацию, представляющую интерес, можно отображать пользователю в более полном виде 68. Изображение лица ребенка можно просто сохранять и печатать или предоставлять матери в электронном виде. Сохраненные настройки в системе можно предоставлять по умолчанию в ультразвуковой системе. Альтернативно, сонографист или другой клиницист может вручную определять выбранные ориентации и сохранять эти настройки в системе для последующего использования, например, как показано на фиг. 4. Следует отметить, что настоящее изобретение также можно применять для просмотра других тканевых структур плода, таких как кисть или ступня. В другом примере сердце можно визуализировать подобно плоду, как описано в настоящем документе. Модель сердца можно использовать для того, чтобы идентифицировать ориентацию сердца, и выбранную ориентацию можно использовать для того, чтобы показывать сердце в другой ориентации, нежели фактическая ориентация, представленная в полученных трехмерных ультразвуковых данных. Выбранные ориентации можно планировать так, чтобы всегда отображать конкретную камеру сердца в определенной ориентации, и вдобавок со светом и тенями, чтобы лучше видеть конкретные области ткани сердца для улучшенных диагностических возможностей.
Понятно, что примеры и варианты осуществления, описанные в настоящем документе, приведены в иллюстративных целях и что различные модификации или изменения в их свете могут прийти на ум специалисту в данной области и включены в сущность и область этой заявки и объем приложенной формулы изобретения. Кроме того, возможны различные комбинации вариантов осуществления, описанные в настоящем документе, и такие комбинации считают частью настоящего изобретения. Кроме того, все признаки, рассмотренные применительно к какому-либо одному из вариантов осуществления в настоящем документе, можно легко адаптировать для использования в других вариантах осуществления в настоящем документе. Использование различных терминов или номеров позиций для схожих признаков в различных вариантах осуществления не обязательно подразумевает другие различия, нежели те, которые могут быть изложены в явной форме. Соответственно, подразумевают, что настоящее изобретение описано лишь на основании приложенной формулы изобретения и не ограничено предпочтительными вариантами осуществления, описанными в настоящем документе.
Группа изобретений относится к медицинским диагностическим системам, а именно к системам визуализации и способам отображения трехмерного ультразвукового изображения в требуемой ориентации просмотра. Способ содержит получение с использованием зонда преобразователя данных трехмерного ультразвукового изображения, содержащих анатомический признак пациента, определение ультразвуковой системой фактической ориентации анатомического признака по отношению к зонду преобразователя, при этом ультразвуковая система содержит множество сохраненных настроек, определяющих ориентацию анатомического признака и световую модель для генерации освещения и затенения анатомического признака, отображение данных трехмерного ультразвукового изображения так, что анатомический признак располагают в выбранной ориентации, которая отличается от фактической ориентации, и в пространственной связи с моделью освещения так, что отображаются участки освещения и затенения на анатомическом признаке, причем ориентация и световая модель соответствуют выбранной сохраненной настройке, при этом способ включает выбор пользователем сохраненной настройки при отображении в режиме реального времени данных трехмерного ультразвукового изображения, причем каждая визуализация в режиме реального времени показывает другую ориентацию анатомического признака и другую световую модель согласно каждой из настроек, сохраненных в ультразвуковой системе. Способ осуществляется ультразвуковой системой, которая содержит зонд преобразователя, процессор объемной визуализации и световой модели, дисплей и устройство ввода. Использование группы изобретений позволяет сэкономить время для клинически значимого скрининга плода на предмет различных потенциальных аномалий. 2 н. и 9 з.п. ф-лы, 4 ил.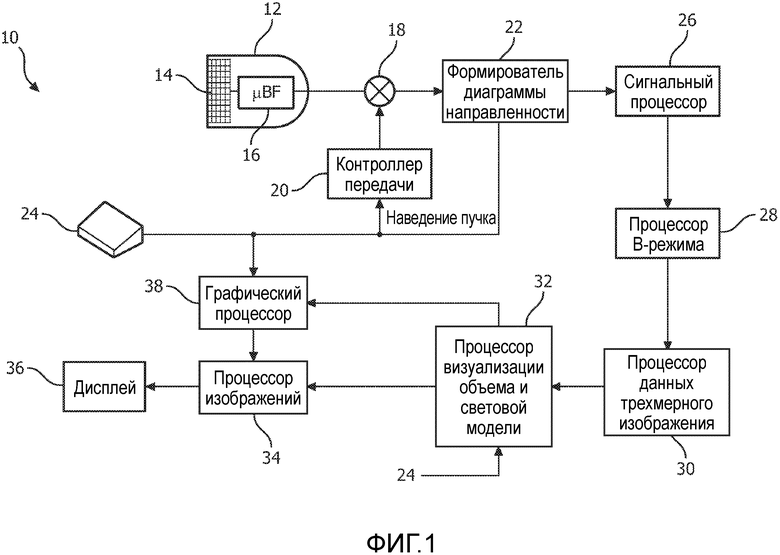
1. Способ отображения трехмерного ультразвукового изображения в требуемой ориентации просмотра, содержащий:
получение с использованием зонда преобразователя, содержащегося в ультразвуковой системе, данных трехмерного ультразвукового изображения, содержащих анатомический признак пациента;
определение ультразвуковой системой фактической ориентации анатомического признака по отношению к зонду преобразователя;
при этом ультразвуковая система содержит множество сохраненных настроек, причем каждая настройка определяет ориентацию анатомического признака и световую модель для генерации освещения, и затенения анатомического признака;
отображение данных трехмерного ультразвукового изображения в качестве визуализации, содержащей анатомический признак, так, что анатомический признак располагают в выбранной ориентации, которая отличается от фактической ориентации, и в пространственной связи с моделью освещения так, что отображаются участки освещения и затенения на анатомическом признаке, причем ориентация и световая модель соответствуют выбранной сохраненной настройке из упомянутого множества сохраненных настроек,
при этом способ содержит выбор пользователем выбранной сохраненной настройки при отображении множества визуализаций в режиме реального времени данных трехмерного ультразвукового изображения, содержащих анатомический признак, причем каждая визуализация в режиме реального времени показывает другую ориентацию анатомического признака и другую световую модель согласно каждой из настроек, сохраненных в ультразвуковой системе.
2. Способ по п. 1, причем способ дополнительно включает в себя отображение визуализации данных трехмерного ультразвукового изображения, содержащих анатомический признак, в ориентации, соответствующей фактической ориентации.
3. Способ по п. 1, дополнительно содержащий использование выбранной сохраненной настройки для последующих ультразвуковых сканирований для разных пациентов.
4. Способ по п. 1, причем определение фактической ориентации содержит применение структурных моделей для определения ориентации поверхности анатомического признака, идентификацию анатомических ориентиров в анатомическом признаке или их сочетание.
5. Способ по п. 1, дополнительно содержащий настройку относительных интенсивностей освещения и затенения пользователем после отображения данных трехмерного ультразвукового изображения в виде визуализации.
6. Способ по п. 1, причем анатомический признак содержит по меньшей мере часть лица плода.
7. Ультразвуковая система для отображения объема трехмерного ультразвукового изображения в требуемой ориентации просмотра, содержащая:
зонд преобразователя, выполненный с возможностью получать данные трехмерного ультразвукового изображения, содержащие анатомический признак пациента;
множество сохраненных настроек, причем каждая настройка определяет ориентацию анатомического признака и световую модель для генерации освещения, и затенения анатомического признака;
процессор объемной визуализации и световой модели,
дисплей;
устройство ввода;
при этом процессор объемной визуализации и световой модели выполнен с возможностью определять фактическую ориентацию анатомического признака по отношению к зонду преобразователя и генерировать визуализацию данных трехмерного ультразвукового изображения, содержащих анатомический признак, так, что анатомический признак расположен в выбранной ориентации, которая отличается от фактической ориентации, и в пространственной связи с моделью освещения так, что отображаются участки освещения и затенения на анатомическом признаке, причем ориентация и световая модель соответствуют выбранной сохраненной настройке из упомянутого множества сохраненных настроек;
при этом процессор объемной визуализации и световой модели дополнительно выполнен с возможностью генерировать множество визуализаций в режиме реального времени данных трехмерного ультразвукового изображения, содержащих анатомический признак, причем каждая визуализация в режиме реального времени показывает другую ориентацию анатомического признака и другую световую модель согласно каждой из настроек, сохраненных в ультразвуковой системе;
при этом дисплей выполнен с возможностью отображать упомянутое множество визуализаций в режиме реального времени данных трехмерного ультразвукового изображения;
при этом устройство ввода выполнено с возможностью позволять пользователю выбирать выбранную сохраненную настройку из упомянутого множества сохраненных настроек при отображении на дисплее упомянутого множества визуализаций в реальном режиме времени.
8. Ультразвуковая система по п. 7, причем ультразвуковая система дополнительно выполнена с возможностью отображения на дисплее визуализации данных трехмерного ультразвукового изображения, содержащих анатомический признак, в ориентации, соответствующей фактической ориентации.
9. Ультразвуковая система по п. 7, причем определение фактической ориентации содержит применение структурных моделей для определения ориентации поверхности анатомического признака, идентификацию анатомических ориентиров в анатомическом признаке, или их сочетание.
10. Ультразвуковая система по п. 7, причем анатомический признак содержит по меньшей мере часть лица плода.
11. Ультразвуковая система по п. 10, причем процессор объемной визуализации и световой модели дополнительно выполнен с возможностью удалять по меньшей мере некоторые данные трехмерного ультразвукового изображения, представляющие ткани, которые не являются тканями лица в лице плода.
| US2007046661 A1, 01.03.2007 | |||
| Ahmed F | |||
| Elnokrashy, "Multipass GPU Surface Rendering in 4D Ultrasound" - 2012 Cairo International Biomedical Engineering Conference (CIBEC), Cairo, Egypt, December 20-21, 2012: pp.39-43 | |||
| US2011125016 A1, 26.05.2011 | |||
| RU2011153951 A, 20.07.2013. |

