Использование: для измерения высоты полета летательных аппаратов.
Для решения задач навигации и посадки летательных аппаратов (ЛА), особенно автономных ЛА, требуются радиовысотомеры (РВ), обеспечивающие достаточно высокую точность измерения высоты. В некоторых случаях допустимая погрешность измерения малых высот (до 10 метров) задается значениями не более 50...60 см при времени измерения не более 0,1 с; а цена младшего разряда (шаг квантования по высоте) не более 10...15 см.
Одной из технических проблем при решении данной задачи является операция преобразования временного интервала между зондирующим и отраженным импульсами в число с достаточно малым шагом квантования 10...15 см и менее.
Известно устройство «Радиолокационный импульсный рециркуляционный уровнемер» (патент на изобретение №2176382), в котором для обеспечения достаточно малой дискретности квантования временных интервалов и высокой точности измерения малых дальностей применяется импульсный рециркуляционный метод. В этом случае период повторения зондирующих импульсов пропорционален измеряемой дальности, что позволяет перейти от непосредственного однократного измерения величины запаздывания отраженного сигнала к измерению длительности последовательности из N периодов повторения зондирующих импульсов. При этом значение N ограничивается только допустимым временем измерения и может достигать, например, для уровнемеров несколько сотен тысяч и более периодов.
Кроме того, цикл единичного замера уровня в устройстве состоит из двух этапов - измерение периода рециркуляции при работе устройства по опорному сигналу, формируемому специальным отражателем, расположенным в заданном месте тракта распространения зондирующего сигнала, и измерение периода рециркуляции при работе по информационному сигналу, отраженному от поверхности вещества, загруженного в резервуар. При вычислении уровня загрузки резервуара значение периода рециркуляции, определенное на первом этапе, вычитается из значения, полученного на втором этапе, что позволяет значительно снизить влияние медленно меняющихся факторов (температуры окружающей среды, старения радиоэлементов и других) на приборную погрешность и, в конечном счете, на погрешность измерения уровня.
Устройство по упомянутому патенту реализовано на предприятии ОАО УПКБ «Деталь» в «Уровнемерах радиолокационных взрывозащищенных» (сертификат Госстандарта России RU.C.29.005.A №13814 от 14.01.2003). Здесь получены: шаг квантования выходной информации по дальности 1 мм и допустимый предел абсолютной погрешности по дальности 5 мм при времени единичного замера менее 1 с и частоте повторения эталонных меток времени 11059 кГц. Очевидно, если учесть, что шаг квантования для радиовысотомеров может быть увеличен до 10 см, то при прочих равных условиях время единичного замера может быть уменьшено в 100 раз и не превысит 0.01 с.
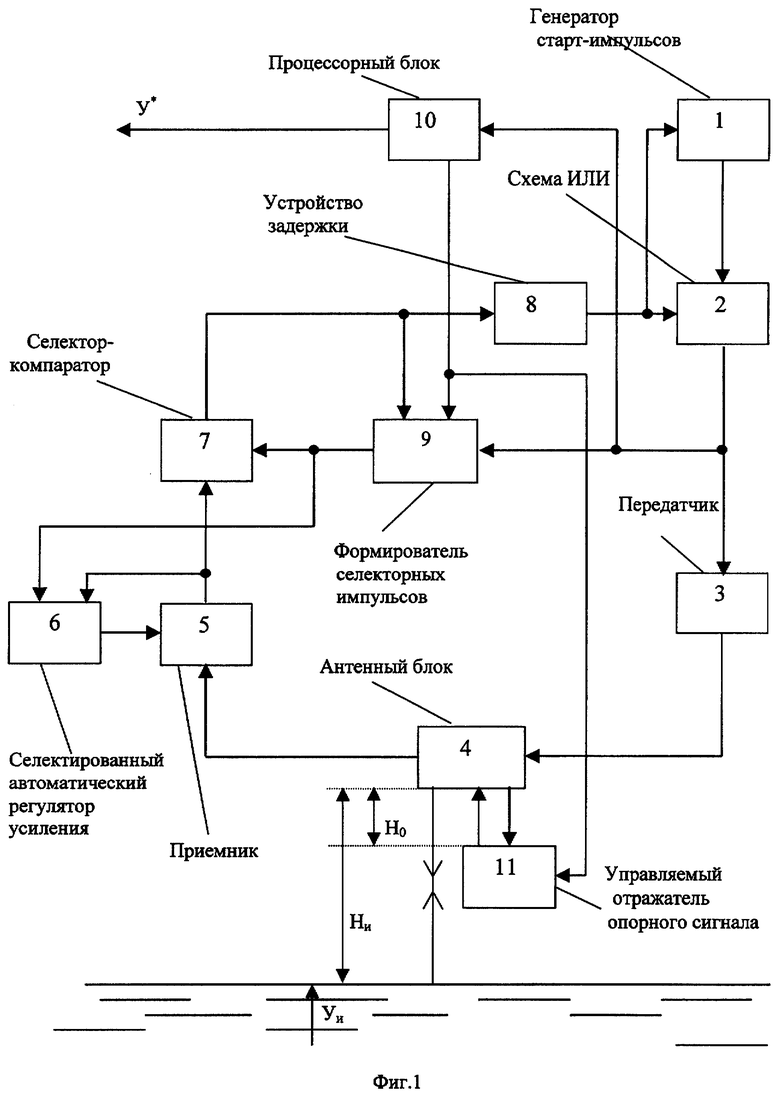
Структурная схема устройства показана на фигуре 1.
Рециркуляция в устройстве возникает в контуре: схема ИЛИ 2, передатчик 3, антенный блок 4, отражающий объект (подстилающая поверхность или управляемый отражатель опорного сигнала), приемник 5, селектор-компаратор 7, устройство задержки 8. Последнее необходимо для ограничения максимальной частоты повторения импульсов рециркуляции до разумной величины.
Работа устройства по информационному сигналу (отраженному от подстилающей поверхности) или по опорному сигналу определяется временным положением селекторных импульсов на выходе формирователя селекторных импульсов 9, который управляется процессорным блоком 10.
Процессорный блок 10 выполняет две функции:
- формирование команды коммутации задержки селекторных импульсов и управления формирователем опорного сигнала или, что одно и то же, команды переключения режимов работы рециркулятора по информационному сигналу, либо по опорному сигналу;
- вычисление и формирование выходной информации в заданной форме.
С точки зрения радиовысотометрии данное устройство имеет тот недостаток, что из-за возможных глубоких флюктуаций отраженного от поверхностей со сложным рельефом сигнала возможен срыв процесса рециркуляции и, следовательно, процесса измерения высоты.
Указанный недостаток в радиовысотомерах устраняется за счет применения в них следящего устройства. В этом случае информационным временным интервалом является интервал между моментом излучения зондирующего сигнала и следящим строб-импульсом.
Известны радиовысотомеры с цифровым выходом РВ-В. ГУ1.000.008, РВ-21 ГУ1.000.048, РВ-075 ГУ1.000.085 разработки и изготовления предприятия ОАО Уральское проектно конструкторское бюро «Деталь». Первый из них устанавливался на автономные космические аппараты типа «Луна», а два последних - авиационные.
Обобщенная структурная схема таких радиовысотомеров, включающая все основные функциональные элементы, приведена на фигуре 2.
Радиовысотомеры содержат:
- генератор синхронизирующих импульсов 1,
- передатчик 2,
- антенный блок 3,
- приемник 4,
- схему АРУ 5,
- систему электронного сопровождения отраженных импульсов, состоящую из временного модулятора 6, временного дискриминатора 7 и интегратора 8,
- схему захвата 9,
- процессорный блок 10.
Необходимо отметить, что в РВ-В и РВ-21 блок электронного сопровождения аналоговый, а в РВ-075 - цифровой.
Схема АРУ в процессе поиска отраженного сигнала обеспечивает регулировку усиления приемного тракта, поддерживая напряжение шумов на его выходе на заданном уровне, а в режиме сопровождения отраженного сигнала схема АРУ работает как селектированная, поддерживая на постоянном уровне амплитуду сопровождаемого видеоимпульса.
В радиовысотомере РВ-В схема АРУ выполняет только первую функцию.
Процессорный блок 10 выполняет две основные функции:
- преобразование временного интервала между импульсом запуска передатчика и следящим строб-импульсом в число,
- преобразование полученного числа в выходной сигнал заданной формы.
При этом выполнение указанных функций процессорный блок выполняет только при наличии сигнала РСИ-Н (разрешение съема информации о высоте), поступающего со схемы захвата 9, то есть только в режиме сопровождения, отраженного от подстилающей поверхности сигнала.
При выполнении операции преобразования «временной интервал - число» в процессорном блоке с целью обеспечения требуемой точности преобразования используется метод статистического накопления, при котором погрешность за счет дискретности эталонных меток ΔН определяется выражением:
где Тэ - период повторения импульсов генератора эталонных меток;
n - число периодов, за которое происходит усреднение,
С - скорость света в вакууме.
Из последнего выражения видно, что устройство фиг.2 по сравнению с устройством фиг.1 имеет тот недостаток, что при прочих равных условиях оно имеет значительно большее время единичного замера. Действительно если в первом случае достаточно производить измерения интервала, состоящего из n периодов рециркуляции, то во втором потребуется n2 периодов повторения зондирующих импульсов, который, к тому же, существенно больше максимально возможного периода рециркуляции.
Кроме того, в данном устройстве не предусмотрены меры, устраняющие приборные составляющие погрешности, обусловленные нестабильностью задержек сигналов во внутренних цепях радиовысотомера во времени и от климатических факторов.
Ниже в качестве аналога изобретения выбрано устройство (радиовысотомер), выполненное в соответствии с фиг.2.
Оба недостатка прототипа, упомянутых выше, устраняются в предлагаемом устройстве, структурная схема которого приведена на фиг.3.
Устройство, как и прототип, содержит систему автосопровождения отраженных импульсов, но в отличие от прототипа здесь после перехода системы в режим захвата отраженного сигнала осуществляется рециркуляция следящего строб-импульса в контуре, включающем в себя временной модулятор. Очевидно, что в этом случае период рециркуляции пропорционален измеряемой высоте.
С целью устранения влияния нестабильностей задержек сигналов во внутренних цепях радиовысотомера на его точностные характеристики в устройстве предусмотрена возможность определения суммарной внутренней задержки сигналов при работе по опорному сигналу, формируемому специальным управляемым отражателем опорного сигнала, место установки которого в приемопередающем тракте известно. Значение указанной задержки запоминается и в последующем учитывается при оценке измеряемой высоты. Периодичность проведения данной операции задается процессорным блоком по заданной программе.
Таким образом, в предлагаемом устройстве, как и в прототипе, обеспечивается работа по флюктуирующему сигналу и при этом достигаются:
- возможность получения достаточно малого шага квантования по высоте при приемлемых значениях времени наблюдения, что обеспечивается соответствующим режимом рециркуляции сигналов в устройстве;
- возможность обеспечения повышенной точности измерения высоты за счет существенного уменьшения влияния нестабильностей задержек сигналов во внутренних цепях радиовысотомера на выходную информацию посредством разбиения процесса измерения на два этапа - работы по эталонному сигналу и работы по сигналу, отраженному от подстилающей поверхности, и последующих необходимых вычислений.
Кроме того, в устройстве предусмотрена возможность ограничения в требуемых пределах частоты повторения зондирующих импульсов и следящих строб-импульсов, поступающих на временной дискриминатор и АРУ приемника. Последнее исключает взаимодействие во временном дискриминаторе и в АРУ строб-импульсов с шумами приемника и помехами в периоды рециркуляции, в которых зондирующий импульс не излучался.
К описанию прилагаются следующие чертежи:
- фиг.1 - структурная схема радиолокационного импульсного рециркуляционного уровнемера;
- фиг.2 - обобщенная структурная схема импульсного радиовысотомера с цифровым выходом, являющаяся наиболее близким аналогом заявляемого устройства;
- фиг.3 - структурная схема заявляемого устройства.
На чертежах приняты следующие обозначения:
- Но - расстояние от плоскости раскрыва антенн до управляемого формирователя опорного сигнала;
- Ни - истинное расстояние (высота) от плоскости раскрыва антенн до подстилающей поверхности;
- Уи - истинный уровень вещества в резервуаре;
- У* - оценка уровня вещества в резервуаре измерителем;
- Н* - оценка измеряемой высоты.
Предлагаемое устройство, как и прототип, содержит:
- генератор синхронизирующих импульсов 1;
- передатчик 2;
- антенный блок 3;
- приемник 4;
- схему АРУ 5;
- систему электронного сопровождения отраженных импульсов, состоящую из временного модулятора 6, временного дискриминатора 7 и интегратора 8;
- схему захвата 9;
- процессорный блок 10.
Дополнительно в устройство введены:
- управляемый отражатель опорного сигнала 11,
- устройство задержки 12,
- нормализатор частоты повторения 13,
- логическая схема И 14,
- логическая схема ИЛИ 15,
- логический вентиль 16.
Генератор синхронизирующих импульсов 1 через схему ИЛИ 15 обеспечивает должную синхронизацию работы приемопередающего тракта и системы электронного сопровождения сигналов (СЭС) в режиме поиска отраженного сигнала. После перехода системы в режим сопровождения отраженных импульсов генератор 1 отключается по команде РСИ-Н (разрешение съема информации о высоте), вырабатываемой схемой захвата 9, а дальнейшая синхронизация работы устройств радиовысотомера (РВ) осуществляется импульсами, поступающими из контура рециркуляции на второй вход схемы ИЛИ 15.
Передатчик 2 предназначен для генерации высокочастотных зондирующих импульсов с заданными длительностью, мощностью и несущей частотой. Синхронизация передатчика осуществляется внешними синхронизирующими импульсами.
Антенный блок 3, на вход которого поступают зондирующие импульсы с передатчика, обеспечивает излучение последних в направлении к подстилающей поверхности и прием отраженных от нее сигналов. Антенный блок в зависимости от требуемых тактико-технических характеристик радиовысотомера может быть выполнен как в виде одной антенны в совокупности с антенным переключателем, так и в виде двух раздельных антенн - передающей и приемной. Отраженные сигналы с выхода антенного блока подаются на вход приемника 4, в задачу которого входит усиление отраженных сигналов до заданного уровня, обеспечивающего нормальное функционирование схемы электронного сопровождения.
Селектированный автоматический регулятор усиления приемника 5 обеспечивает поддержание амплитуды сигнала на входе СЭС в требуемых пределах при возможных значительных изменениях его мощности на входе приемника в связи с изменениями высоты и отражающими свойствами подстилающей поверхности. На сигнальный вход схемы АРУ подается напряжение с выхода приемника, а на селектирующий ее вход строб-импульс со схемы СЭС, выполняющий селекцию отраженного сигнала. Выход схемы АРУ подключен ко входу управления усилением приемника.
Схема электронного сопровождения (СЭС) представляет собой контур автосопровождения отраженного сигнала.
Временной дискриминатор 7 является элементом, формирующим сигнал рассогласования (ошибки), пропорциональный отклонению временного положения следящего строба относительно номинального положения по отношению к отраженному сигналу. Для обеспечения выполнения данной функции его сигнальный вход соединен с выходом приемника, а селектирующий вход - с выходом временного модулятора 6, который формирует строб-импульс, временное положение которого пропорционально сигналу, поступающему на его вход с интегратора 8.
Интегратор 8 своим входом подключен к выходу временного дискриминатора и производит операцию интегрирования сигнала ошибки, вырабатываемого временным дискриминатором, в результате чего его выходной сигнал изменяется в ту или иную сторону, обеспечивая смещение временного положения строб-импульсов в сторону, способствующую уменьшению сигнала ошибки.
Таким образом СЭС обеспечивает слежение за отраженным сигналом, в результате чего временное положение строб-импульсов является отображением задержки отраженного сигнала и, следовательно, пропорционально измеряемой высоте.
Схема захвата 9 анализирует состояние системы СЭС и вырабатывает сигнал «разрешение съема информации о высоте» РСИ-Н при установлении СЭС в режим сопровождения отраженных импульсов, для чего на ее вход подается соответствующий сигнал с временного дискриминатора 7.
Процессорный блок 10 выполняет 2 функции:
- задает требуемую цикличность режимов работы РВ по опорному сигналу либо по информационному;
- производит вычисления и формирования выходной информации РВ.
Первая функция в блоке обеспечивается формированием двух сигналов:
- команды управления интегратором 8, по которой на выходе последнего устанавливается требуемый для осуществления заданного режима работы РВ сигнал;
- сигнал, подаваемый на управляемый отражатель опорного сигнала и обеспечивающий повышение его радиояркости в режиме работы РВ по опорному сигналу и существенное снижение его радиояркости при работе РВ по информационному сигналу.
Процессорный блок может быть выполнен на базе микропроцессоров, в частности микропроцессоров АТ89С51/24Р1 или AT89S8252/24P1.
Управляемый отражатель опорного сигнала (УООС) 11 может быть выполнен с использованием диодов СВЧ с p-i-n-структурой КА517А-2. Например, в случае, если антенный блок имеет одну приемопередающую антенну с коаксиально-волноводным переходом, то p-i-n-диод может быть подключен между зондом возбуждения волновода и корпусом. В этом случае, при пропускании через p-i-n-диод постоянного тока, зонд возбуждения по ВЧ-сигналу окажется замкнутым на корпус, что будет обеспечивать хорошие условия для отражения зондирующего сигнала или, иначе говоря, - формирования опорного сигнала. При запирании p-i-n-диода опорный сигнал значительно уменьшается, так как условия согласования по ВЧ-сигналу в переходе улучшаются, а информационный сигнал по той же причине увеличивается.
В случае, если антенный блок выполнен в виде раздельных передающей и приемной антенн, то УООС может быть выполнен в виде управляемого аттенюатора на p-i-n-диодах, включенных между передающим и приемным трактами радиовысотомера.
Упомянутые устройства УООС подразумевают сравнительно малую задержку опорных сигналов относительно зондирующих импульсов, что не всегда обеспечивает достаточно качественное их формирование.
Проблема здесь состоит в том, что на временном интервале, близком к моменту излучения зондирующих импульсов, наблюдаются пролезающие на приемный тракт паразитные сигналы - это и зондирующий импульс, это и помехи, создаваемые мощными модулирующими импульсами, это и различного рода переотражения зондирующего импульса во внутрисистемных цепях радиовысотомера. Данные помехи не стабильны во времени как по задержки, так и по амплитуде, зависят их параметры и от климатических факторов.
Для устранения данного фактора в качестве УООС используются твердотельные ультразвуковые линии задержки, выполненные на высококачественных кристаллах, например ниобате лития. Такие линии обладают достаточно высокими долговечностью и стабильностью таких параметров, как задержка и затухания формируемого сигнала. Эти линии могут выполняться как на проход задерживаемого сигнала, так и на отражения. Первые используются в радиовысотомерах, в которых антенный блок состоит из двух антенн, а вторые, если в составе РВ одна приемопередающая антенна. Включение и отключения эталонного сигнала в этом случае осуществляется посредством управляемого аттенюатора (например, на p-i-n-диодах), включенного последовательно с линией задержки.
Устройство задержки 12 предназначено для ограничения максимальной частоты повторения импульсов рециркуляции до разумной величины. Устройство, например, может быть выполнено в виде двух последовательно включенных мультивибраторов на микросхемах 533АГ3.
Нормализатор частоты повторения 13 предназначен для ограничения максимальной частоты повторения зондирующих импульсов в режимах работы по опорному сигналу и при измерении малых высот. При этом необходимо обеспечение жесткой и стабильной привязки импульсов на его выходе к импульсам на его входе.
Схема И 14 разрешает прохождения строб-импульсов временного модулятора (ВМ) 6 при поступлении на ее второй вход сигнала РСИ-Н, в результате чего в контуре: схема ИЛИ 15, ВМ 6, схема И 14 устанавливается режим рециркуляции импульсов.
Логический вентиль (ЛВ) 16 пропускает на селекторные входы временного дискриминатора (ВД) 7 и схемы АРУ 5 только те строб-импульсы, которые образуются в периоды рециркуляции, в которых производится излучение зондирующих импульсов, это необходимо для избежания излишнего влияния на работоспособность РВ шумов приемника и помех.
Работает устройство следующим образом: после включения производится цикл работы РВ по опорному сигналу, для чего сигналами с процессорного блока 10 повышается радиояркость УООС 11, а интегратор устанавливается в положение, соответствующее некоторому временному опережению строб-импульсов ВМ 6 относительно опорного импульса. Затем управляющий сигнал блока 10, поданный на интегратор 8, снимается и СЭС переходит в режим поиска. После захвата формируется сигнал РСИ-Н и в контуре ИЛИ 15, ВМ 6, И 14 возникает режим рециркуляции импульсов с периодом, пропорциональным общей задержке сигналов во внутренних цепях РВ. Значение этого периода измеряется и запоминается в процессорном блоке 10.
Для работы РВ по информационному сигналу команда управления радиояркостью УООС 11 устанавливается в положение, соответствующее минимальной его яркости, а интегратор 8 - в положение, соответствующее началу поиска отраженного информационного импульса. Далее, как и в предыдущем режиме, осуществляется поиск и захват информационного сигнала, а также последующее его сопровождение, при этом в контуре ИЛИ 15, ВМ 6, И 14 устанавливается период рециркуляции, равный сумме задержек сигналов во внутреннем контуре РВ и задержки отраженного сигнала, соответствующей измеряемой высоте.
В этом режиме процессорный блок с заданной периодичностью производит замер периода рециркуляции и последующие вычисления значений измеряемой высоты с учетом данных, полученных в режиме работы по опорному сигналу.
Предлагаемое устройство было реализовано на предприятии в опытном образце радиовысотомера РВ-Я, который был подвергнут лабораторным и летным испытаниям, подтвердившим ожидаемые результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2519911C2 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ УРОВНЕМЕР | 2003 |
|
RU2247950C1 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ УРОВНЕМЕР | 2000 |
|
RU2176382C1 |
| РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2273862C1 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2258943C1 |
| РАДИОВЫСОТОМЕР С ЧАСТОТНО-МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2012 |
|
RU2519952C2 |
| РАДИОВЫСОТОМЕР | 2001 |
|
RU2212684C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |

Использование: для измерения высоты полета летательных аппаратов. Технический результат: повышение точности измерения высоты при приемлемых значениях времени измерения и средней мощности излучения передатчика. Сущность изобретения: в устройство, содержащее генератор синхронизирующих импульсов, передатчик, антенный блок, приемник, селектированный автоматический регулятор усиления, систему автосопровождения отраженных импульсов, состоящую из временного модулятора, временного дискриминатора и интегратора, схему захвата и процессорный блок, формирующий выходную информацию в заданной форме, введены: управляемый отражатель опорного сигнала, устройство задержки запуска передатчика, нормализатор частоты повторения зондирующих импульсов, логические схемы И и ИЛИ, замыкающие контур рециркуляции селекторных импульсов временного модулятора в режиме сопровождения отраженных импульсов, логический вентиль, пропускающий селекторные импульсы на входы временного дискриминатора и селектированного автоматического регулятора усиления только в периоды рециркуляции, в которые производится запуск передатчика, а также расширены функции процессорного блока. 3 ил.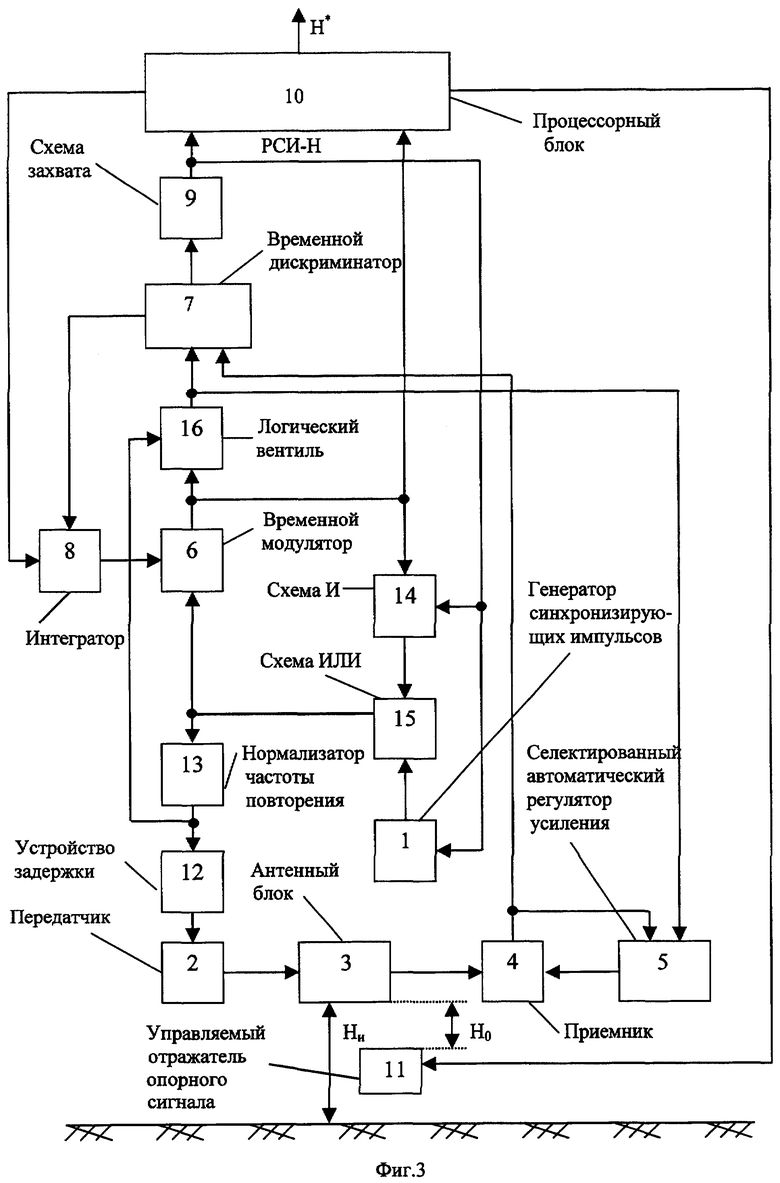
Радиолокационный импульсный рециркуляционный радиовысотомер, содержащий генератор синхронизирующих импульсов, передатчик, антенный блок, вход которого подключен к выходу передатчика, приемник, вход которого соединен с выходом антенного блока, селектированный автоматический регулятор усиления, выход которого соединен с входом управления усилением приемника, а сигнальный вход подключен к выходу приемника, временной модулятор, временной дискриминатор, сигнальный вход которого соединен с выходом приемника, интегратор, вход которого подключен к разностному выходу временного дискриминатора, а выход к входу управления временного модулятора, схему захвата, вход которой соединен с выходом обнаружения временного дискриминатора, процессорный блок, информационный вход которого соединен с выходом временного модулятора, вход определения режима работы радиовысотомера соединен с выходом схемы захвата, а выход является выходом радиовысотомера, отличающийся тем, что в него введены схема ИЛИ, первый вход которой подключен к выходу генератора синхронизирующих импульсов, а выход соединен со входом временного модулятора, схема И, первый вход которой соединен с выходом временного модулятора, второй вход - с выходом схемы захвата, а выход подключен ко второму входу схемы ИЛИ, нормализатор частоты повторения, вход которого соединен с выходом схемы ИЛИ, устройство задержки, к входу которого подключен выход нормализатора частоты повторения, а выход соединен с входом запуска передатчика, логический вентиль, вход которого соединен с выходом временного модулятора, выход подключен к стробирующим входам временного дискриминатора и селектированного автоматического регулятора усиления, а вход управления соединен с выходом нормализатора частоты повторения, первый выход управления процессорного блока соединен с входом управления интегратора, а второй выход управления подключен ко входу управления управляемого отражателя опорного сигнала, блокирующий вход генератора синхронизирующих импульсов соединен с выходом схемы захвата.
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ УРОВНЕМЕР | 2000 |
|
RU2176382C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2154285C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 2003 |
|
RU2234718C1 |
| US 4733239 A, 22.03.1988 | |||
| US 6731236 А, 04.05.2004. | |||

