Группа изобретений относится к области наземного безрельсового транспорта, а более конкретно - к двухколейным персональным колесным транспортным средствам с электроприводом и к способам их передвижения с преодолением лестничных маршей.
Известные двухколейные персональные транспортные средства, такие как инвалидные кресла-коляски, персональные электромобили (пермобили) и электроскутеры, имеют, как правило, недостаточную универсальность.
Известно персональное транспортное средство Chairman Mini Stander, содержащее раму, передние ведомые поворотные колеса, задние неповоротные колеса большего диаметра, кресло с сиденьем, спинкой, опорами для ног с рычагом и подпятниками, рычажно-шарнирное устройство фиксации и изменения положения кресла посредством приводов независимого наклона и перемещения сиденья, спинки и рычага опор для ног в продольной вертикальной плоскости. Известное транспортное средство снабжено также системой управления приводами с органами управления, при этом устройство фиксации и изменения положения кресла выполнено с возможностью установки в одно из фиксированных положений, при котором сиденье, спинка и рычаг опор для ног расположены в пределах одной общей для них вертикальной плоскости (с коррекцией на эргономические требования и физиологические особенности пользователя транспортного средства) и предусмотрены дополнительные фиксаторы для тела пользователя [1] .
Конструкция известного транспортного средства является трансформируемой, что позволяет его использовать для передвижения как в уличных, так и в домашних условиях, в частности, путем перевода пользователя в вертикальное положение (для общения с окружающими на уровне глаз собеседника, для работы с книгами на стеллажах, для нагрузки суставов и т.д.). Однако транспортное средство тихоходно, не отличается высокой маневренностью и проходимостью, а главное, не способно самостоятельно преодолевать лестничные марши.
Известно многофункциональное преобразуемое транспортное средство, содержащее раму ("модуль") в виде шарнирно взаимосвязанных частей ("кластеров") с блоками управляемых неповоротных колес, снабженных упругими шинами, опору для поддержания груза, в частности кресло с сиденьем, спинкой, опорами для ног с рычагом и подпятниками, электроприводы вращения колес и систему управления приводами с органами управления и гироскопическим стабилизатором положения опоры (кресла), а также автономный источник энергии. В известном транспортном средстве рама выполнена в виде расположенных слева и справа развитых балансиров, на которых колеса установлены попарно и симметрично без возможности изменения расстояния между их осями. Предусмотрен электропривод вращения балансиров, обеспечивающий либо опору транспортного средства на все колеса (включая два неуправляемых поворотных колеса малого диаметра) для перемещения в легких условиях, либо на четыре управляемых колеса при вывешенных колесах малого диаметра для перемещения по песку и преодоления поребрика тротуара, либо только на два соосных управляемых колеса (нулевое значение колесной базы, опора на две точки). В последнем случае равновесие транспортного средства обеспечивают с помощью гироскопических стабилизаторов с сенсорами совместно с приводами. Сиденье жестко связано со спинкой и с рычагом опор для ног без возможности трансформации кресла. Приводы совместно с системой управления обеспечивают, в частности, подъем кресла (без его трансформации) на высоту, при которой уровень глаз сидящего в кресле пользователя равен или близок к уровню глаз стоящих рядом людей. В систему управления входит пульт управления типа "джойстик", установленный на подлокотнике кресла, и гироскопический стабилизатор положения транспортного средства с сенсорами. Автономный источник энергии установлен на внутренней рамной части [2].
Известное транспортное средство в силу своих компоновочных особенностей, геометрии, скоростных характеристик, отсутствия рулевого управления с рулем имеет недостаточно широкие функциональные возможности. Оно не позволяет перевести тело пользователя в вертикальное положение на уровне окружающих (собеседников). Сидячая поза при опоре на два колеса не обеспечивает нагрузки суставов, психологически некомфортна в общении. Транспортное средство не приспособлено для компактного размещения на месте автомобильного кресла за рулем автомобиля, к использованию в игровых и спортивных мероприятиях и на пляже.
Известен способ преодоления транспортным средством лестничных маршей путем вращения балансиров, на которых попарно установлены управляемые колеса, при одновременном обеспечении равновесия транспортного средства гироскопическим стабилизатором с сенсорами совместно с приводами [3].
Преодоление лестничных маршей и иных профильных препятствий известным способом из-за короткой колесной базы при весьма высоком уровне расположения кресла вызывает неуверенность пользователя в своей безопасности, диктует необходимость подстраховочно придерживаться руками перил. Кроме того, сужены возможности преодоления лестничных маршей различного типоразмера.
Известно самоходное инвалидное кресло, содержащее две полурамы, на одной из которых установлено сиденье и каждая из которых снабжена соответствующей трубой, которые телескопически соединены между собой и каждая из которых связана с парой опорных элементов. На каждой из пар опорных элементов закреплены колеса с независимыми приводами их управления. Трубы выполнены с возможностью фиксации одна относительно другой. Каждое колесо снабжено роликами-грунтозацепами, а каждый привод управления выполнен в виде электромеханического привода с тормозом с образованием мотор-колеса [4].
Известное устройство недостаточно универсально, имеет низкие скоростные возможности. Постоянство клиренса и невозможность обеспечения низкой посадки пользователя в кресле затрудняет размещение устройства в автомобиле.
Известен способ передвижения самоходного инвалидного кресла по лестничным маршам, при котором перемещение осуществляют путем попеременного (поочередного) вращения и торможения передних и задних колес и изменения расстояния между передними и задними колесами за счет вращения соответствующих колес [4].
Недостатками известного способа являются низкая скорость перемещения по лестничным маршам вследствие поочередности вращения передних и задних колес; повышенные габариты вследствие использования для ведущего режима колес только зон их статической устойчивости; невысокая надежность преодоления лестничных маршей различного типоразмера вследствие недостаточно широкого диапазона изменения центра масс (неоптимальность развесовки по осям передних и задних колес: вертикальная нагрузка на ось вышестоящих колес менее половины силы тяжести транспортного средства).
Известно самоходное инвалидное кресло, содержащее попарно установленные передние и задние колеса и устройство бесступенчатого изменения колесной базы при преодолении лестничных маршей. Передние и задние колеса установлены на раме, а устройство бесступенчатого изменения колесной базы включает в себя электропривод, связанный с системой управления, в состав которой входят по меньшей мере два датчика положения передних и задних колес относительно ступеней лестничного марша. Датчики выполнены с подвижными частями, установленными с возможностью контакта с ближайшей ступенью [5].
Недостатками известного устройства являются повышенные габариты вследствие использования для ведущего режима колес только зон их статической устойчивости; повышенная стоимость системы управления и устройства в целом; тяжелые условия работы датчиков, контактирующих со ступенями.
Известен способ передвижения самоходного инвалидного кресла по лестничным маршам, при котором передвижение осуществляют за счет попеременного вращения и торможения передних и задних колес и изменения колесной базы от минимального до максимального значения, а при устойчивом положении передних по ходу колес на верхней ступени лестничного марша синхронно вращают передние и задние колеса при неизменной достигнутой колесной базе по крайней мере до устойчивого подъема задних по ходу колес на верхнюю ступень. При этом синхронное вращение передних и задних колес при передвижении самоходного кресла над верхней ступенью лестничного марша начинают, предварительно уменьшив колесную базу до минимального значения при заторможенных передних по ходу колесах в их устойчивом положении на верхней ступени [6].
Недостаток известного способа передвижения самоходного кресла по лестничным маршам заключается в повышенных габаритах по дважды названной выше причине. При этом рассматривается, главным образом, заключительный этап преодоления лестничного марша (переход с лестничного марша на верхнюю площадку).
Наиболее близким аналогом заявляемого транспортного средства, совпадающим с ним по наибольшему числу существенных признаков и принятым за прототип, является транспортное средство, содержащее раму из двух телескопически взаимосвязанных частей с попарно установленными на них передними и задними управляемыми колесами с упругими, преимущественно пневматическими, шинами, приводы вращения колес, устройство изменения и фиксации колесной базы при сохранении опоры на все колеса, снабженное приводом, кресло с сиденьем и спинкой, рычажно-шарнирное устройство фиксации и изменения положения кресла относительно колесной базы с приводом наклона кресла, систему управления приводами с органами управления, а также автономный источник энергии. В нем минимальный диапазон изменения колесной базы L определяется (с запасом и в пересчете на гладкие колеса) условием статической устойчивости колес в ведущем режиме на ступени лестничного марша

где L1 - минимальная величина колесной базы, см;
L2 - максимальная величина колесной базы, см;
l, h - соответственно длина и высота ступени лестницы, см;
R - радиус колеса, см.
Фиксация колесной базы обеспечивается ручным фиксатором. В варианте устройства изменение колесной базы обеспечивается только приводом линейного перемещения во всем диапазоне изменения L, при этом подвижное звено привода постоянно жестко соединено с рамной частью. В другом варианте устройства такой привод отсутствует и изменение с пульсацией L осуществляется при отключенном фиксаторе (т. е. при свободной колесной базе) путем вращения колес посредством приводов их вращения в разных скоростных режимах [7].
Известное транспортное средство имеет узкое функциональное назначение, характеризуется низкими скоростными возможностями, большими потребными ходами подвижного звена привода линейного перемещения, недостаточно широким для оптимальной развесовки по осям передних и задних колес (на лестничном марше) диапазоном изменения положения центра масс. Изменение геометрии кресла предполагает, в лучшем случае, лишь возможность ручной регулировки спинки в узком диапазоне. Постоянство клиренса и невозможность низкой посадки пользователя в кресле затрудняют размещение в автомобиле и других носителях. Автоматизация передвижения по лестничным маршам требует организации довольно сложной системы управления на базе бортового процессора.
Наиболее близким аналогом заявляемых способов по совокупности существенных признаков, принятым за прототип, является способ преодоления лестничных маршей описанным выше транспортным средством за счет приводов вращения передних и задних колес при постоянной опоре на все колеса при адаптированной к профилю лестничного марша колесной базе L в пределах диапазона от L1 до L2. Если вне лестничных маршей задают минимально возможное значение L для маневренного движения в стесненных условиях, то для преодоления лестничного марша значение L предварительно увеличивают посредством приводов вращения колес или привода пульсации колесной базы, а затем изменяют (пульсируют) посредством того же привода, но по косинусоидальному закону при условии постоянного совмещения осей одноименных колес со средней полосой зоны их устойчивости без учета угла (конуса) трения. Размах (удвоенная амплитуда) пульсации колесной базы L соответствует диапазону от L1 до L2. При этом используют условия (1), (2) [7].
"Автоматическое" смещение центра масс транспортного средства в сторону подъема лестничного марша вследствие увеличения колесной базы при переходе из режима эксплуатации вне лестничного марша (в сложенном состоянии) в режим движения по лестничному маршу носит ограниченный характер и при замене периферийных упругих элементов в виде поперечных роликов упругими шинами (а они предпочтительны для плавного, менее шумного передвижения по ровной поверхности) не обеспечивает возможности развития необходимой силы тяги передних по ходу вверх (задних по ходу вниз) колес по сцеплению даже в пределах зоны устойчивости.
В известном способе-прототипе неучет угла (конуса) трения в определении зоны устойчивости колес приводит к не всегда оправданному завышению диапазона пульсации колесной базы. Это ухудшает габаритно-массовые характеристики самоходных кресел, снижает среднюю скорость перемещения по лестничным маршам, повышает требования к быстродействию привода пульсации колесной базы и в целом устройства изменения колесной базы, повышает динамические нагрузки на водителя-пользователя. Как правило, недостаточность и, во всяком случае, неоптимальность распределения динамической вертикальной нагрузки на передние и задние колеса (недогруженность вышестоящих колес) в режиме движения по лестничным маршам либо делает невозможным преодоление этого профильного препятствия, либо приводит к неустойчивости движения, пробуксовкам и срывам колес со ступеней. Кроме того, относительно высокая посадка водителя-пользователя в кресле психологически препятствует эксплуатации, повышает вероятность аварийных ситуаций.
Задачей являлась разработка такой конструкции персонального транспортного средства и способа преодоления им лестничных маршей, которые бы обеспечивали расширение технико-эксплуатационных возможностей персональных транспортных средств, преимущественно скутеров и самоходных кресел, за счет оперативной их трансформации (с минимальными трудозатратами водителя-пользователя) при сопутствующем повышении безопасности, маневренности и профильной проходимости, включая возможность самостоятельного перемещения по лестничным маршам различного типоразмера.
Решение поставленной задачи достигается группой изобретений, объединенных единым изобретательским замыслом, а именно тем, что в транспортном средстве, содержащем раму в виде телескопически взаимосвязанных частей с попарно установленными на них передними и задними колесами с упругими шинами, приводы вращения колес, устройство изменения и фиксации колесной базы при сохранении опоры на все колеса, снабженное приводом, кресло с сиденьем и спинкой, рычажно-шарнирное устройство фиксации и изменения положения кресла относительно колесной базы с приводом наклона сиденья кресла, систему управления приводами с органами управления и автономный источник энергии, по меньшей мере одна пара упомянутых колес выполнена поворотной и связана с рулевым приводом, снабженным рулевой колонкой с рулем, установленной перед креслом с возможностью изменения и фиксации ее длины и положения по углу наклона в продольной вертикальной плоскости, включая сложенное ее нерабочее положение, а устройство фиксации и изменения положения кресла снабжено приводом его перемещения в продольной вертикальной плоскости. Рамная часть с передними колесами, образующими передний колесный мост, и рамная часть с задними колесами, образующими задний колесный мост, могут быть телескопически встроены в третью часть рамы, расположенную между упомянутыми мостами, с возможностью независимого друг от друга продольного возвратно-поступательного перемещения. Рамные части упомянутых мостов могут быть установлены в третьей части рамы коаксиально с частичным взаимным перекрытием. Задние колеса могут быть установлены с возможностью вертикального возвратно-поступательного перемещения и фиксации относительно их рамной части в поднятом положении посредством управляемой подвески, например, снабженной разнесенными в поперечном направлении приводами возвратно-поступательного перемещения. Поворотными могут быть выполнены все колеса (передние и задние) и в этом случае рулевой привод должен быть выполнен с возможностью выборочного поворота осей передних и задних колес. Устройство изменения и фиксации колесной базы может быть выполнено с приводом ее пульсации, корпус которого установлен на рамной части, несущей кресло, а подвижное звено привода установлено посредством отключаемого фиксатора на другой рамной части, телескопически связанной с первой. Отключаемый фиксатор, связывающий подвижное звено привода пульсации колесной базы с рамной частью, может быть выполнен с зазором в направлении взаимной подвижности частей рамы и с электрическим выключателем, например концевым, с возможностью реверсирования движения подвижного звена привода пульсации при перекладке зазора таким образом, что при выборке зазора в сторону увеличения колесной базы L привод пульсации уменьшает значение L, а при выборке зазора в противоположную сторону увеличивает его.
Целесообразно выполнять раму, устройство изменения и фиксации колесной базы и систему управления приводами с органами управления с возможностью фиксации и пульсации колесной базы L в диапазоне от L1 до L2, определяемых соотношениями

где l, h - соответственно длина и высота ступени лестничного марша, см;
R - радиус колеса, см;
α≤arctgϕ - угол трения как функция коэффициента сцепления ϕ колеса со ступенью.
Привод наклона сиденья кресла может быть выполнен в виде привода вращения, корпус которого закреплен в передней зоне сиденья, подвижное звено закреплено на одном конце рычага рычажно-шарнирного устройства, а второй конец рычага неподвижно жестко связан с подвижным звеном дополнительного привода вращения, корпус которого закреплен на раме. Кресло может быть снабжено опорами для ног в виде рычага и подпятников и выполнено с шарнирным сочленением сиденья, спинки и рычага опор для ног, при этом спинка и рычаг опор для ног снабжены приводами их наклона. Привод наклона спинки может быть выполнен в виде привода возвратно-поступательного перемещения, который корпусом шарнирно прикреплен к спинке с тыльной ее стороны и подвижным звеном шарнирно связан с задней кромкой сиденья. Привод наклона рычага опоры для ног может быть выполнен в виде привода возвратно-поступательного перемещения, корпус которого шарнирно закреплен в задней зоне сиденья, а подвижное звено шарнирно связано с верхним плечом двуплечего рычага, нижнее плечо которого жестко прикреплено к рычагу опоры для ног. Рычаг опор для ног может быть выполнен в виде привода возвратно-поступательного перемещения, подвижное звено которого прикреплено к подпятникам. В транспортном средстве система управления может быть снабжена гироскопическим стабилизатором положения кресла в продольной и поперечной плоскостях. Автономный источник энергии может быть установлен на тыльной стороне сиденья, а также снабжен приводом изменения углового положения источника энергии относительно сиденья.
Решение поставленной задачи достигается также тем, что в способе преодоления лестничных маршей транспортным средством, характеризуемым указанной выше совокупностью основных конструктивных признаков, за счет приводов вращения передних и задних колес при постоянной опоре на все колеса и адаптированной к профилю лестничного марша колесной базе L в пределах диапазона от L1 до L2, смещают центр масс транспортного средства посредством устройств изменения и фиксации колесной базы и положения кресла в сторону подъема лестничного марша до преимущественно равной вертикальной нагрузки на оси колес с обеспечением возможности развития необходимой тяги по сцеплению одних одинаково названных колес в пределах углов трения, достаточной для подъема других одинаково названных колес на очередную ступень, устанавливают среднее в диапазоне от L1 до L2 значение колесной базы L* вращением передних и задних колес в неодинаковых скоростных режимах при расфиксированной колесной базе, после чего фиксируют колесную базу и вращают все колеса в заданных скоростных режимах.
Решение поставленной задачи достигается также тем, что в способе преодоления лестничных маршей транспортным средством, характеризуемым указанной выше совокупностью основных конструктивных признаков и наличием привода пульсации колесной базы, включающем вращение передних и задних колес при постоянной опоре на все колеса и адаптированной к профилю лестничного марша колесной базе L в пределах диапазона от L1 до L2, смещение центра масс транспортного средства посредством устройств изменения и фиксации колесной базы и положения кресла в сторону подъема лестничного марша до преимущественно равной вертикальной нагрузки на оси колес с обеспечением возможности развития необходимой тяги по сцеплению одних одинаково названных колес в пределах углов трения, достаточной для подъема других одинаково названных колес на очередную ступень, установление среднего в диапазоне от L1 до L2 значения колесной базы L* вращением передних и задних колес в неодинаковых скоростных режимах при расфиксированной колесной базе, при нахождении задних по ходу транспортного средства колес в пределах их углов трения на лестничном марше и вращении передних по ходу транспортного средства колес увеличивают колесную базу посредством привода пульсации колесной базы до ввода осей, перемещающихся на очередную ступень передних колес в пределы их новых углов трения, затем уменьшают колесную базу посредством привода пульсации колесной базы при нахождении осей передних колес в упомянутых углах трения до ввода осей перемещающихся на очередную ступень задних колес в пределы их новых углов трения, после чего повторяют указанную последовательность операций вплоть до полного преодоления лестничного марша.
Значения L1 и L2 при осуществлении обоих вариантов способа могут быть выбраны из соотношений (3) и (4).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время именно за счет последней достигается новый технический результат в соответствии с поставленной задачей: расширение технико-эксплуатационных возможностей персональных транспортных средств, преимущественно скутеров и самоходных кресел, за счет оперативной их трансформации при сопутствующем повышении безопасности, маневренности и профильной проходимости, включая возможность самостоятельного перемещения по лестничным маршам различного типоразмера.
Общие основные отличительные признаки для двух вариантов осуществления способа сводятся к следующему:
- оперативное изменение положения центра масс путем трансформации транспортного средства до примерно равной вертикальной нагрузки на оси передних и задних колес (развесовки по осям);
- при свободной колесной базе (т.е. при расфиксированном "телескопе") задают разный скоростной режим вращения передних и задних колес (мотор-колес), тем самым изменяя колесную базу до значения L*, равного среднеарифметическому от значений L1 и L2 (эта операция может осуществляться одновременно с первой и даже с упреждением в зависимости от конкретных ситуаций);
- вращают все колеса (мотор-колеса), задав им скоростные режимы, причем одинаковые (с неизбежным буксованием) или разные (с учетом особенностей перемещения их осей на лестничном марше - нелинейности и несинфазности для передних и задних колес).
При осуществлении первого варианта заявляемого способа преодоление лестничных маршей происходит как передвижение с постоянной базой L* = const, а при втором варианте передвижение осуществляют с пульсацией в диапазоне от L1 до L2 со средним значением L*.
При фиксированном значении колесной базы значительно повышаются средние скорости передвижения. Выбор значения L* является универсальной рекомендацией для широкого спектра возможных эксплуатационных условий и представляет, соответственно, наибольший интерес при организации крупносерийного и массового производства.
При недостаточности постоянного значения L*, например, на нестандартной и/или дефектной лестнице, в других тяжелых условиях (при низком коэффициенте сцепления и т.д.) осуществляют регулярную работу привода пульсации колесной базы, при этом увеличение колесной базы приводом пульсации со скоростью, превышающей скорость перемещения осей колес, способствует закатыванию восходящей на очередную ступень пары колес (вне углов трения) другой парой колес, находящейся в ведущем режиме (в динамически устойчивом положении в пределах углов трения).
Заявляемое транспортное средство изображено на чертежах, где:
на фиг.1 показано транспортное средство в случае удлиненной колесной базы (для движения в уличных условиях), вид сбоку;
на фиг. 2 показано транспортное средство в случае укороченной колесной базы (для движения в условиях помещения), вид сбоку;
на фиг.3 - вид транспортного средства в плане;
на фиг. 4 - кинематическая схема взаимосвязи рамных частей с одним "телескопом";
на фиг. 5 - кинематическая схема взаимосвязи рамных частей с двумя противоположно направленными параллельными "телескопами";
на фиг. 6 - кинематическая схема взаимосвязи рамных частей с двумя соосными (оппозитными) "телескопами";
на фиг. 7 - кинематическая схема взаимосвязи рамных частей с двумя противоположно направленными, коаксиально встроенными друг в друга "телескопами";
на фиг.8 - схема подвески задних колес, вид сзади, совмещенная со схемой гироскопической стабилизации положения кресла;
на фиг. 9 - схема рулевого управления, вид в плане, при удлиненной колесной базе;
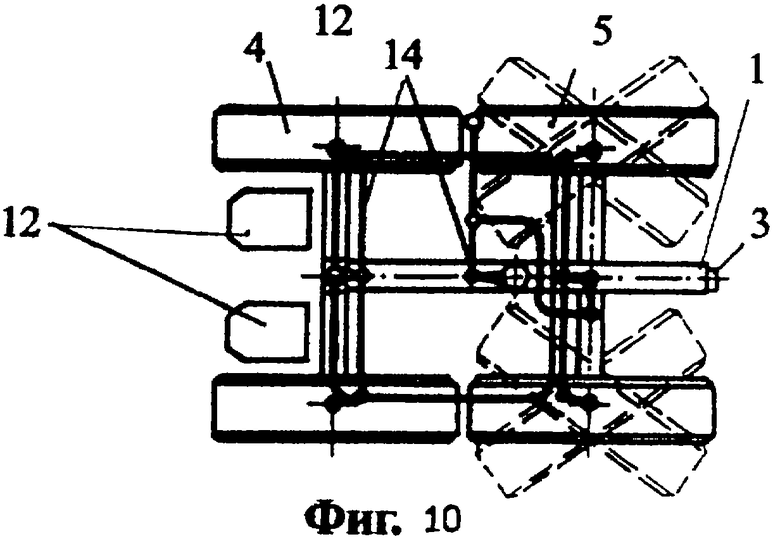
на фиг.10 - схема рулевого управления, вид в плане, при укороченной колесной базе;
на фиг.11 - схема размещения электрооборудования;
на фиг.12 - схема размещения приводов;
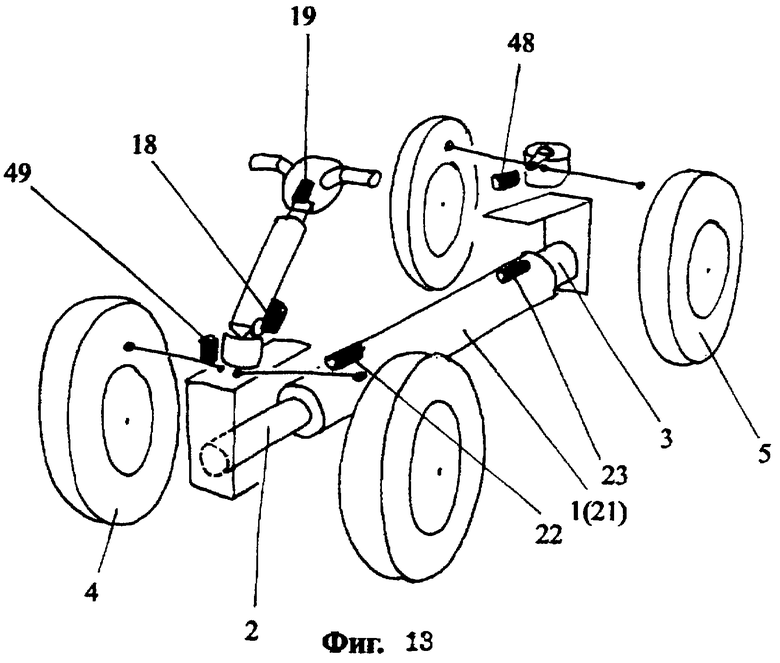
на фиг.13 - схема размещения фиксаторов;
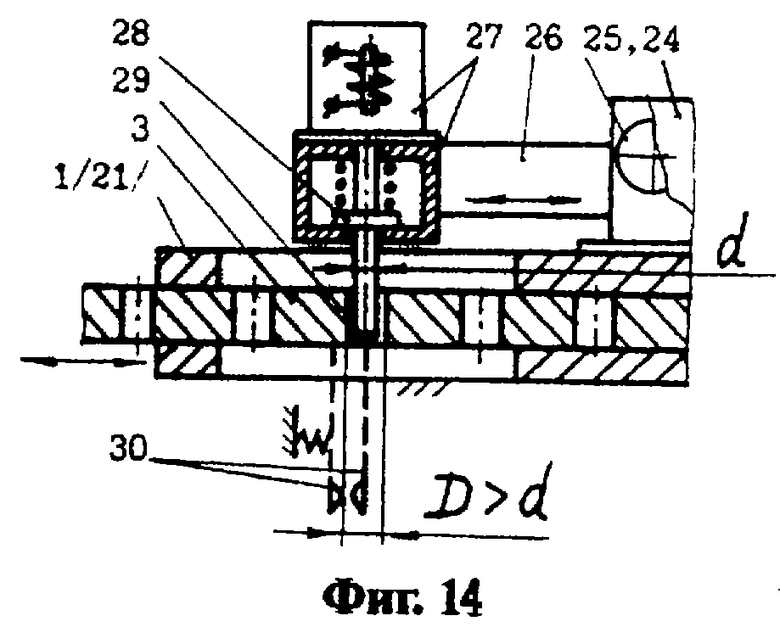
на фиг.14 - пример взаимосвязи привода пульсации колесной базы с рамными частями (фрагмент), где D - диаметр отверстия в рамной части; d - диаметр пальца фиксатора;
на фиг. 15, 16 - номограммы для выбора значений колесной базы при преодолении лестничных маршей;
на фиг. 17 схематически изображено транспортное средство с водителем-пользователем при преодолении лестничных маршей (в случае движения вверх с удлиненной колесной базой);
на фиг.18 - то же (в случае движения вниз с удлиненной колесной базой);
на фиг.19 схематически изображено транспортное средство при вертикальном расположении водителя-пользователя (в случае укороченной колесной базы);
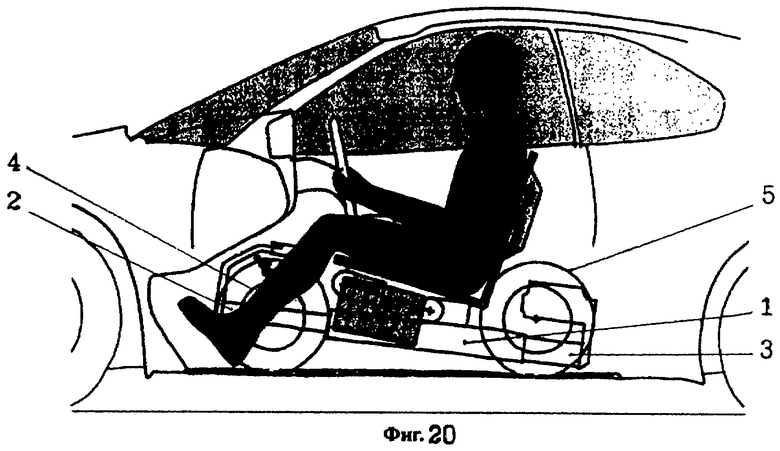
на фиг.20 - размещение транспортного средства на месте водителя в автомобиле;
на фиг.21 - размещение транспортного средства в мотоносителе;
на фиг.22 - схема передвижения транспортного средства на лестничном марше с указанием предельно допустимого (минимального) значения колесной базы L1 по условию сцепления верхних колес (G1, G2 - вертикальная нагрузка соответственно на верхние и нижние колеса);
на фиг. 23 - то же, с указанием предельно допустимого (максимального) значения колесной базы L2 по условию сцепления нижних колес;
на фиг. 24 - схема взаимодействия колеса с пневматической шиной сверхнизкого давления с кромкой ступени;
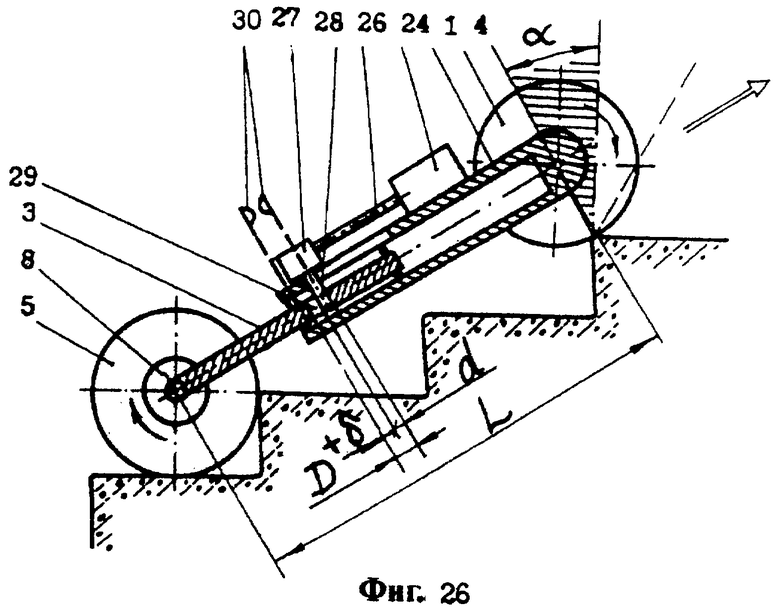
на фиг. 25 - 28 - схема перекладки зазора в фиксаторе привода пульсации колесной базы при автоматическом управлении подъемом на лестничном марше.
Заявленное устройство - транспортное средство, названное авторами "ТРАНССКУТЕР" ("трансформируемый скутер"), в предпочтительном (оптимальном) исполнении содержит (см. фиг.1-3) раму, состоящую из частей 1, 2, 3. На передней рамной части 2 установлена пара управляемых (ведущих) колес 4, а на задней рамной части 3 - пара управляемых (ведущих) колес 5. Все колеса снабжены пневматическими или иными упругими шинами 6. Предусмотрены приводы 7, 8 независимого друг от друга вращения всех (или попарно) колес 4 и 5 соответственно (рекомендуется использование мотор-колес). Таким образом, рамная часть 2 с управляемыми колесами 4 образует передний колесный мост, а рамная часть 3 с управляемыми колесами 5 - задний колесный мост. На рамной части 1 установлено кресло посредством устройства фиксации и изменения его положения в продольной вертикальной плоскости (кресло и устройство обозначены позициями поэлементно), регулируемое для эргономической адаптации пользователя. Кресло включает в себя сиденье 9, спинку 10 и опоры для ног с рычагом 11 и двумя подпятниками 12. С тыльной стороны сиденья 9 установлен автономный источник энергии 13 в виде разнесенных в поперечном направлении блоков аккумуляторных, конденсаторных или иных батарей (см. фиг.11). На раме 1-3 установлено также устройство изменения и фиксации колесной базы L (обозначено позициями поэлементно) в широком диапазоне потребных значений от Lmin до Lmax.
Предусмотрен рулевой привод 14 (см. фиг.7), выполненный с возможностью выборочного поворота либо колес 4, либо колес 5 (не исключены варианты с поворотом только передних колес 4 или с возможностью одновременного поворота колес 4, 5 для уменьшения радиуса кинематического поворота, особенно если не предусмотрен поворот бортовым способом). Рулевой привод снабжен рулевой колонкой 15 с рулем 16 мотоциклетного или иного типа. Рулевая колонка 15 установлена перед креслом 9-12 на рамной части 2 (на переднем колесном мосту) с возможностью изменения и фиксации положения по углу наклона в продольной вертикальной плоскости и уровню расположения руля 16, включая сложенное положение (шарнир 17 на фиг.1, 2 и фиксаторы 18, 19 на фиг.3). Кроме того, она установлена с возможностью наклона и фиксации в рабочем состоянии в любом продольном направлении (вперед-назад) относительно своего вертикального положения.
В состав транспортного средства входит система управления всеми приводами, включающая в себя органы управления (руль 16 и панель управления 20 на колонке 15, не исключено дублирование от ручного пульта типа "джойстик" или аналогичных систем).
Рама 1-3 выполнена в виде телескопического устройства (с двумя "телескопами") с возможностью независимого друг от друга продольного перемещения его штоков - рамных частей 2 и 3 относительно корпуса "телескопа" - рамной части 1. Иными словами (в привязке к прототипу), рамные части 1 и 2, а также рамные части 1 и 3 телескопически взаимосвязаны с возможностью изменения и фиксации расстояния L между осями колес 4 и 5 в диапазоне потребных значений колесной базы при сохранении опоры на все колеса 4, 5. В общем случае устройства допускаются варианты: с одним "телескопом" (рамная часть 3 отсутствует, колеса 5 и кресло 9-11 установлены на рамной части 1 - см. фиг. 4); с двумя противоположно направленными, параллельными, причем со смещением в горизонтальной или в вертикальной плоскостях, "телескопами" или соосными (оппозитными) "телескопами" (см. фиг.5, 6); с двумя противоположно направленными, коаксиально встроенными друг в друга "телескопами" (см. фиг.7).
В оптимальной конструкции используют последний вариант (по фиг.7): рамная часть 2 (передний колесный мост) и рамная часть 3 (задний колесный мост) частично встроены в продольную трубчатую (или иного поперечного сечения) балку 21 коаксиально с частичным взаимным перекрытием (взаимное перекрытие частей-штоков 2, 3 в балке 21).
В устройство изменения и фиксации колесной базы в любом случае входят указанные "телескопы" и колеса 4, 5 с приводами их независимого вращения 7, 8. В простейшей реализации "телескопы" снабжены фиксаторами (стопорами) 22, 23 (см. фиг.1, 2, 13), также входящими в состав устройства изменения и фиксации колесной базы. В данной конструкции они выполнены дистанционно управляемыми. В более совершенном варианте устройство изменения и фиксации колесной базы выполнено с приводом пульсации колесной базы, предпочтительно в виде электромеханического привода вращения с корпусом 24, зубчатым колесом 25 и находящейся в зацеплении с ним зубчатой рейкой 26 в качестве выходного подвижного звена (см. фиг. 1, 2, 12). Корпус 24 вертикально установлен на рамной части 1 (или непосредственно на балке 21), а подвижное звено (зубчатая рейка) 26 установлено посредством отключаемого фиксатора 27 на рамной части 3 (на колесном мосту). Вертикальное расположение привода вращения 24-25 вместо более простой возможной схемы с горизонтально расположенным линейным приводом объясняется значительными компоновочными ограничениями.
Особенность предлагаемой взаимосвязи фиксатора 27 с рамной частью 3 и с системой управления состоит в следующем. Фиксатор 27 включает в себя палец 28 диаметром d, двухпозиционно установленный с возможностью ввода-вывода в одном из отверстий 29 в рамной части 3, имеющем диаметр D предпочтительно больше диаметра d на величину максимального зазора δ (см. фиг.14, 25-28).
Для автоматизации процесса передвижения транспортного средства на лестничных маршах (передним ходом) с пульсацией колесной базы предлагается следующий вариант устройства с "датчиком перекладки зазора" (см. фиг.14, 25-28).
Фиксатор 27 (конкретно - его палец 28) соединен с подвижным относительно рамной части 3 контактором электрического выключателя 30, а подпружиненный неподвижный контактор выключателя 30 (не считая деформации пружины) соединен с рамной частью 3. Может быть применен, например, концевой выключатель 30. При зазоре δ=D-d между рамной частью 3 и пальцем 28 в направлении взаимной подвижности частей 1 и 3 рамы, который может быть условно отрицательным (см. фиг. 25, 28) и положительным (см. фиг.26, 27) в зависимости от распределения продольных сил в системе 1-5, контакторы выключателя 30 замкнуты (выключатель включен) при минус δ и разомкнуты (выключатель 30 выключен) при +δ (см. фиг.25-28). Иначе говоря, от перекладки зазора δ (минус - влево или плюс - вправо) зависит положение контакторов выключателя 30.
Другой возможный вариант устройства с "датчиком перекладки зазора" (без иллюстраций) - организация зазора δ не между пальцем 28 и отверстием 29 в рамной части 3, а между пальцем 29 и подвижным звеном 25, 26, т.е. внутри "головки" фиксатора 27.
Выключатель 30 электрически связан с системой управления транспортного средства с возможностью реверсирования работы привода пульсации колесной базы при перекладке зазора δ таким образом, что при выборке зазора в сторону увеличения L (образование +δ - см. фиг.26, 27) привод пульсации уменьшает величину L, а при выборке зазора в противоположную сторону (образование минус δ - см. фиг.25, 28) увеличивает величину L.
Cистема управления транспортным средством выполнена преимущественно с возможностью пульсации колесной базы, по крайней мере, в диапазоне от L1 до L2. Значения последних величин рекомендуется определять соотношениями (3), (4).
Графические представления этих зависимостей (номограммы) проиллюстрированы примером для диаметра колес R=0,18 м и размеров ступени l=0,3 м, h= 0,15 м (см. фиг. 15, 16). Значение L1 (см. фиг.15, 22) является предельно допустимым (минимальным на лестничном марше) по условию сцепления верхних колес со ступенями лестницы, а значение L2 (см. фиг.15, 23) - предельно допустимым (максимальным на лестничном марше) по условию сцепления нижних колес со ступенями. Соответственно, отрицательное значение разности L2 - L1 (зона между кривыми L1 и L2 левее точки К на фиг.15) является диапазоном значений L, в котором движение по лестничному маршу невозможно. Таким образом, это - "запретная" зона и ее следует преодолевать пульсацией базы. "Запретная" зона определяет минимально необходимый ход рамной части 3 относительно рамной части 1 (а значит и ход звена 25 и рейки 26), среднюю скорость движения и т.д. При указанных выше числовых значениях величин R, l, h потребный ход звена 25 (рейки 26), определяющий пульсацию базы L2 - L1, не должен быть меньше 0,89-0,79=0,10 м. Положительное значение разности L2 - L1 (заштрихованная зона между кривыми L1 и L2 правее точки К) является диапазоном значений L, в котором движение по лестничному маршу возможно. Оно возможно даже при постоянном значении L в любой точке этой зоны. Таким образом, заштрихованная зона является "допустимой" зоной, т.е. такой, в каждой точке которой обеспечено (гарантировано) поочередное попадание осей верхних и нижних колес в углы (конусы) трения.
С ростом диаметра колес 4, 5 точка К при прочих равных условиях смещается на номограмме (см. фиг.15) правее, сужая заштрихованную зону и, соответственно, сужая возможности преодоления лестничных маршей. В то же время радиус колес 4, 5 не должен быть меньше значения Rmin=h из условия профильной проходимости. Таким образом, рекомендуется установленное авторами оптимальное значение диаметра колес 4, 5 (от 0,36 до 0,38 м) для принятого спектра возможных типоразмеров лестничных маршей.
Случай ϕ=0 (α=0) дает геометрическое совпадение L1 и L2 для заявленного способа и принятых во внимание аналогов с "телескопами".
Если в приводе 24-27 не предусмотрена возможность фиксации (стопорения) "телескопа", то может быть сохранен фиксатор (стопор) 23, обеспечивающий жесткую взаимосвязь частей 1, 3 при определенных значениях L, в частности (в одном из рекомендуемых вариантов) при среднеарифметическом значении колесной базы при любом расчетном значении коэффициента сцепления ϕ: L*=0,5 (L1+L2).
В общем случае, диапазон изменения L (по возможностям взаимосвязи "телескопов" 1, 2 и 1, 3) включает в себя максимальное значение базы Lmax (рама полностью раздвинута вращением колес 4, 5 при расфиксированных "телескопах"), минимальное значение Lmin (рама полностью сложена вращением колес 4, 5 при расфиксированных "телескопах") и диапазон от L1 до L2 пульсации базы за счет привода (приводов) пульсации базы. При этом значение Lmin существенно отдалено от указанного диапазона. Значение Lmax либо совпадает со значением L2, либо меньше него. В принципе, не исключен вариант с превышением значения Lmax над значением L2. При указанных выше числовых значениях величин R,l,h, (L2-L1) рекомендуются, в частности, значения Lmin=0,49 м, Lmax =0,89...0,73м.
Задние колеса 5 установлены на рамной части 3 (а в варианте с одним "телескопом" - на рамной части 1) посредством управляемой подвески 31 с возможностью вертикального перемещения и фиксации относительно рамной части 3 (1) в поднятом положении, при котором транспортное средство приобретает дифферент на задний мост и рамная часть 3 опускается до опорной поверхности из расчета компоновки транспортного средства вместе с пользователем на месте сидения за рулем серийного автомобиля (см. фиг.20).
Подвеска 31 снабжена разнесенными в поперечном направлении линейными, преимущественно электромеханическими приводами 32, 33 (см. фиг.1, 2, 8, 12) с возможностью их независимого управления.
Входящий в систему управления гироскопический стабилизатор 34 положения кресла 9-12 выполнен с возможностью стабилизации последнего в поперечной плоскости посредством подвески 31 (приводов 32, 33).
Гироскопический стабилизатор выполнен также с возможностью стабилизации кресла 9-12 в продольной плоскости посредством привода наклона кресла.
Кресло 9-12 выполнено с шарнирным сочленением сиденья 9 со спинкой 10 (шарнир 35) и сиденья 9 с рычагом 11 (шарнир 36) с возможностью их установки в различные положения. Одно из характерных положений сиденья 9, спинки 10 и рычага 11 - в пределах одной, общей для них вертикальной плоскости (с коррекцией на эргономические требования и физиологические особенности пользователя, с учетом формы и деформаций подушек сиденья 9 и спинки 10 и т.д.).
Возможность продольного перемещения кресла в широком диапазоне и столь существенной его трансформации обеспечивается конструкцией устройства фиксации и изменения положения кресла, в частности наклона сиденья 9, снабженного приводом наклона кресла в продольной вертикальной плоскости (обозначен позициями поэлементно) а также наличием приводов независимого наклона других его элементов - спинки 10 и рычага 11, выполненных в виде линейных, преимущественно электромеханических приводов, связанных с системой управления транспортного средства. Устройство фиксации и изменения положения кресла включает в себя рычаг 37, верхним своим концом связанный с подвижным звеном 38 привода вращения, а нижним - с подвижным звеном 39 аналогичного привода (подвижные звенья изображены на фиг.1, 2 в виде дисков). При этом корпус 40 первого привода закреплен в передней зоне сиденья 9, а корпус 41 второго привода закреплен на рамной части 1 (см. фиг.1, 2, 12).
Линейные приводы 42, 43 наклона спинки 10 относительно сиденья 9 своими корпусами шарнирно прикреплены к спинке 10 с тыльной ее стороны и подвижными звеньями шарнирно связаны с задней кромкой сиденья 9 (см. фиг.1, 2, 12).
Линейные приводы 44, 45 наклона рычага 11 своими корпусами шарнирно закреплены в задней зоне сиденья 9 и подвижными звеньями шарнирно связаны с верхним плечом двуплечего рычага 46, установленного шарнирно в передней зоне сиденья 9 (см. фиг.1, 2, 12).
Рычаг 46 и подвижное звено 38 привода вращения установлены соосно (см. фиг.1, 2).
Рычаг 11 выполнен в виде линейных, преимущественно электромеханических приводов 47, 48, корпуса которых жестко прикреплены к нижнему плечу рычага 46, а подвижные звенья - к подпятникам 12 (см. фиг.1, 2, 12).
Не исключен, в принципе, вариант с одиночными (т.е. не парами) приводами наклона основных элементов кресла: спинки 10 и рычага 11.
Диапазон возможного наклона кресла 9-12 в целом соответствует устойчивому положению пользователя в режиме движения на лестничных маршах различного типоразмера: он равен или превышает угол наклона лестничного марша (наиболее распространен угол 30o).
С учетом "автоматического" изменения развесовки транспортного средства при изменении величины L и изменении наклона транспортного средства в различных режимах эксплуатации привод фиксации и изменения положения кресла выполнен с обеспечением возможности развития тяги по сцеплению колес 4, 5, по крайней мере, в их ведущем режиме, включая передвижение по лестничным маршам. Необходима примерно одинаковая вертикальная нагрузка на передние и задние колеса (т.е. примерно равная развесовка по осям верхних и нижних колес 4, 5) при любых эксплуатационных углах наклона транспортного средства вплоть до максимально возможного (соответствует максимальному углу наклона лестничного марша), причем в динамике, т.е. с учетом реактивных моментов на транспортном средстве, движущемся по лестничному маршу, или при ином восхождении-спуске. Это наилучшим образом реализуется, если в транспортном средстве, по крайней мере, часть возможных значений смещения центра масс транспортного средства в продольной вертикальной плоскости определена соотношением (5)
где С - продольное смещение центра масс от положения равного удаления от осей колес (в направлении подъема по лестничному машу), см;
ki=hi/li;
h,l - соответственно высота и длина ступени лестничного марша, см;
i - индекс, относящий параметры к определенному типоразмеру ступени лестничного марша;
Н - высота центра масс транспортного средства, см.
Рекомендуется выполнение приводов 7, 8 вращения колес 4, 5 с возможностью самоторможения за счет применения в них червячных передач и/или фиксаторов (тормозов) 49, 50 (см. фиг.13), исключающих самопроизвольное скатывание под уклон (на склоне или лестничном марше). Рекомендуется также выполнение приводов 7, 8 не менее чем с двумя скоростными диапазонами переднего хода, включая общий для всех колес первый (низший) диапазон. Это может быть достигнуто (наиболее реальное решение для существующего уровня техники) наличием в приводе двухскоростной коробки передач (с электромагнитным переключением): первая передача для полноприводности с большими крутящими моментами при низкой скорости передвижения на лестничном марше и в тяжелых условиях вне лестничных маршей, вторая передача - для реализации скоростного режима "скутер" на ровной местности. В последнем случае устройство может допускать выключение части приводов колес, например колес 4, с переводом этих колес в ведомый режим.
Желательно применение пневматических шин 6 с устройством регулирования давления в них (обычные ниппельные клапаны или, по возможности, устройство дистанционного регулирования давления). Существенно отметить, что шины 6 могут быть стандартными, например автомобильного типа с обычным протектором или с увеличенным коэффициентом трения. Увеличение коэффициента трения может быть достигнуто использованием резины с закрытыми порами или иных аналогичных технических средств. Однако при этом не исключено и применение колес транспортных средств-аналогов с поперечно расположенными роликами в качестве периферийных упругих элементов.
Для оптимизации компоновки, развесовки и удобства трансформации в различные опции, а также в тех случаях, когда не рекомендуется существенно наклонять источник энергии 13, последний может быть связан с сиденьем 9 посредством привода 51 изменения положения источника энергии 13 с возможностью, по крайней мере, его поворота в противоположную от сиденья 9 сторону (см. фиг.1, 2, 8, 12, 17-19). В приведенном примере используется привод вращения, корпус которого закреплен на тыльной стороне сиденья 9 (аналогично приводам 38, 40).
Система управления "трансскутером" может быть размещена в нескольких блоках, распределенных по всей конструкции (см. фиг.11): в представленном примере с тыльной стороны спинки 10, между приводами 42, 43, закреплены блоки 52 управления приводами 7, 8 вращения колес, под ними предусмотрен электрический разъем 53, слева и справа от сиденья 9, над разнесенными по бортам блоками источника энергии 13, размещены блоки 54 управления приводами и средства мониторинга источника 13 с диагностическим разъемом (позицией не выделен).
Изложенные выше примеры конструкции не исключают другие возможные варианты в рамках заявленной совокупности существенных конструктивных признаков.
Заявленное транспортное средство "ТРАНССКУТЕР" работает следующим образом. Для эксплуатации транспортного средства в любом из двенадцати возможных режимов его сначала соответствующим образом трансформируют.
При использовании транспортного средства для скоростного движения в уличных условиях (см. фиг.1) задают увеличенное фиксированное значение L вплоть до максимального (Lmax) или близкого к максимальному (т.е. используют длинную базу рамы). Для этого рамную часть 2 с колесами 4 выдвигают в соответствующее указанному положение посредством приводов 7, 8 (разнонаправленным вращением колес 4, 5) при отключенном фиксаторе 22 и включенных фиксаторах 23, 27, после чего снова включают фиксатор 22 (см. фиг. 1, 13). Для задания значений L, близких к Lmax, дополнительно к этому выдвигают и рамную часть 3 таким же способом при отключенных фиксаторах 23, 27 и затем вновь фиксируют их. При этом остается возможность оперативной корректировки колесной базы работой привода 24-27 при включенном фиксаторе 27 и временном отключении фиксатора 27. В частности, при начальной установке подвижного звена 26 в среднее свое положение возможна симметричная максимальная корректировка на величину, равную половине хода звена 26. Кресло 9-12 устанавливают, в общем случае, посредством приводов 38-48 в удобное для пользователя положение с ориентацией в сторону рулевой колонки 15. Последнюю устанавливают при отключенном фиксаторе 18 в удобное для пользователя рабочее фиксированное угловое положение, включают фиксатор 18, руль 16 также устанавливают на удобную высоту при отключенном фиксаторе 19 и включают фиксатор 19. После этого включают второй (высший) диапазон (передачу в коробке передач) в тяговых приводах 7, 8 всех или каких-либо одинаково названных колес (задних 5 или передних 4) в зависимости от варианта конструктивного выполнения устройства. В последнем случае часть колес оставляют ведомыми.
В описанном положении транспортное средство по своим технико-эксплуатационным характеристикам соответствует скоростному персональному транспортному средству класса "скутер" ("электроскутер") и передвигается обычным для скутеров образом. Это, как правило, скоростной режим передвижения с "длиннобазовой" рамой 1-3 вне лестничных маршей и преодоление склонов на любых скоростях. При этом пользователь осуществляет кинематический поворот за счет поворота передних колес 4 рулем 16.
Для использования транспортного средства в комнатных условиях (см. фиг. 2) задают минимальное (Lmin) или близкое к минимальному фиксированное значение L. Для этого рамную часть 2 с колесами 4 вдвигают в соответствующее указанному положение посредством приводов 7, 8 при отключенном фиксаторе 22 и включают фиксатор 22. Кресло 9-12 смещают несколько вперед посредством приводов 38-41 в удобное для пользователя положение при оптимальной развесовке по осям колес 4 и 5. Рулевую колонку 15 устанавливают при отключенном фиксаторе 18 в вертикальное или близкое к вертикальному, удобное для пользователя рабочее фиксированное угловое положение, включают фиксатор 18, корректируют положение руля 16 при отключенном фиксаторе 19 и включают фиксатор 19 (в случае использования ручного пульта типа "джойстик" колонка 15 с рулем 16 могут быть переведены в сложенное нерабочее положение, при этом переключают систему управления в режим командного рулевого управления). В тяговых приводах 7, 8 включают, как правило, первый (низший) диапазон (передачу в коробке передач). Рулевой привод 14 переключают из режима управления передними колесами 4 в режим управления задними колесами 5 (см. фиг. 10) или, при необходимости и возможности, в режим одновременного управления поворотом колес 4 и 5.
В описанном трансформированном состоянии транспортное средство по своим технико-эксплуатационным характеристикам соответствует маневренным персональным транспортным средствам "самоходное кресло", "пермобиль" и передвигается обычным для таких машин образом, причем с возможностью поворота не только кинематического, но и бортовым способом с нулевым радиусом.
Для работы за столом передний мост 2, 4 выдвигают описанным выше способом до значения L, меньшего Lmax. Кресло 9-12 перемещают вперед-вниз посредством приводов 38-41. Рулевую колонку 15 с рулем 16 переводят в сложенное нерабочее положение с наклоном к сиденью 9. В таком положении осуществляют частичный (передним мостом) въезд транспортного средства с пользователем под крышку стола для размещения пользователя за столом для работы, например, с персональным компьютером, для приема пищи, для участия в играх и т.д. При этом кресло 9-12 оказывается на более низком уровне, чем в первых двух случаях, и ноги пользователя свободно проходят под крышку стола. Руль 16 оказывается между бедер пользователя и тоже не препятствует въезду под стол. При желании пользователь может отрегулировать угол наклона тела наклоном сиденья 9 за счет приводов 38, 40 и/или наклоном рамы 1-3 (дифферентом на задний мост) за счет приводов 32, 33 подвески задних колес 5.
При использовании транспортного средства для отдыха поза, необходимая для придания телу пользователя положения расслабления, например на пляже, предполагает, во-первых, увеличение значения L вплоть до максимального за счет работы тяговых приводов 8 при неработающих тяговых приводах 7 и временно отключенных фиксаторах 23, 27. Иначе говоря, путем выдвижения (выкатывания) заднего моста 3, 5.
Для подъема "трансскутера" на лестничный марш своим ходом по первому варианту способа (на примере подъема передним ходом) непосредственно перед преодолением задают определенное в каждом конкретном случае (в зависимости от эксплуатационных условий) значение колесной базы за счет работы приводов 7, 8 в различных скоростных режимах при расфиксированной колесной базе: при временно отключаемом фиксаторе 23 или (в зависимости от варианта конструкции "трансскутера") временно отключаемых фиксаторах 22, 23, 27 (на фиг.14 палец 28 выведен из отверстия 29) на первом этапе и на втором этапе (при наличии привода 24-27 и необходимости, как корректировка) - посредством привода 24-27 при включенном фиксаторе 27 (на фиг.14 палец 28 введен в отверстие 29) в пределах диапазона от L1 до L2 из условия обеспечения поочередного попадания осей верхних и нижних колес 4, 5, по крайней мере, в ближайшие по их ходу секторы углов (конусов) трения α (см фиг.22, 23 и 25-28) кромок соответствующих ступеней лестничного марша. Согласно геометрическим расчетам для совмещения оси верхних колес 4 при упертых в торец (кромку) ступени нижних колесах 5 (см. фиг.22), вводимых в угол (конус) трения α на очередной ступени, с ближайшей границей угла (конуса) трения α необходимо обеспечить значение колесной базы L1, рассчитанное по формуле (3), а для совмещения оси нижних колес 5 при упертых в торец (кромку) ступени верхних колесах 4 (см. фиг. 23), вводимых в угол (конус) трения α, на очередной ступени с ближайшей границей угла (конуса) трения α необходимо обеспечить значение колесной базы L2, рассчитанное по формуле (4).
Ведущий режим колес 4, 5 возможен, как подчеркивалось выше, лишь в пределах углов (конусов) трения α, начиная с указанной ближайшей границы.
Однако есть еще второе условие реализации силы тяги (далее просто "тяги") - достаточность силы давления в пятне контакта "колесо-ступень". Поэтому одновременно или с некоторой временной задержкой или, наоборот, упреждением по отношению к установке колесной базы смещают центр масс транспортного средства в сторону подъема лестничного марша до преимущественно равной вертикальной нагрузки на оси (развесовки по осям) нижних и верхних колес 4, 5 (G1, G2 на фиг.22, 23), обеспечивая тем самым возможность развития тяги по сцеплению одних одинаково названных колес (верхних - в данном случае 4 или нижних - в данном случае 5) в пределах углов α, достаточной для подъема других одинаково названных колес на очередную ступень лестничного марша. Для этого в дополнение к "автоматическому" перераспределению вертикальной нагрузки на оси (развесовки по осям) колес 4, 5 вследствие изменения взаимного положения рамных частей 1-3 изменяют положение кресла 9-12 посредством привода фиксации и изменения его положения (приводов 39, 41 и 38, 40), наклоняя и/или смещая его в сторону верхних колес 4. Согласно результатам расчетов, условия динамического равновесия транспортного средства при перемещении по лестничному маршу, для обеспечения примерно равной вертикальной нагрузки на оси (развесовки) достаточно, как правило, указанного выше соотношения (5).
Наибольшая проходимость на лестничных маршах имеет место при уменьшенной жесткости шин 6 колес 4, 5, в частности при сверхнизком давлении воздуха в шинах - в диапазоне от 20 до 30 кПа (установлено авторами экспериментально). Это объясняется резким возрастанием коэффициента сцепления ϕ деформируемой шины 6 при "переваливании" через кромку ступени (см. фиг.24). Поэтому движение по лестничному маршу осуществляют, при возможности и необходимости (такая необходимость возникает, прежде всего при низких значениях ϕ в тяжелых условиях эксплуатации - мокрый мрамор, наледь на ступенях), предварительно уменьшив давление воздуха до указанного диапазона путем стравливания воздуха через ниппельные клапаны или посредством устройства дистанционного регулирования давления.
Таким образом, основными условиями передвижения транспортного средства заявленным способом являются:
- обеспечение поочередного попадания осей верхних и нижних колес 4, 5, по крайней мере, в ближайшие по их ходу секторы углов (конусов) трения α кромок ступеней, т.е. сразу за ближайшей границей угла α, еще до достижения границы статического равновесия колеса, совпадающей с нулевым значением α на кромке ступени;
- равная (одинаковая) или близкая к равной (одинаковой) вертикальная нагрузка G1, G2 на оси (развесовка по осям) верхних и нижних колес.
И, наконец, последняя характерная особенность при движении вверх по лестнице: рабочее положение рулевой колонки 15 с наклоном вперед от вертикали, с относительно низким уровнем расположения руля 16 (см. фиг.17). В этом случае используют гораздо более низкое (и, следовательно, безопасное, эргономичное) положение кресла 9-12.
Собственно передвижение на лестничном марше (регулярный режим его преодоления) осуществляют путем вращения колес 4, 5 за счет приводов 7, 8 соответственно, при постоянной опоре на все колеса (в отличие от прототипа-устройства) при адаптированной (изложенным выше образом) к профилю конкретного лестничного марша колесной базе L в пределах диапазона от L1 до L2, с включенным фиксатором 23 (включенными фиксаторами 22, 23 или 22, 23, 27 в зависимости от варианта конструкции "трансскутера") колесной базы, т.е. при зафиксированной колесной базе, иначе говоря, при зафиксированной раме 1-3.
Второй вариант способа преодоления лестничных маршей (по-прежнему с иллюстрацией движения вверх) может осуществляться как при заторможенных колесах в пределах их углов (конусов) трения, так и при вращающихся колесах.
В первом частном случае при остановленных (заторможенных) задних по ходу транспортного средства колесах 5 (в данном случае - нижних) в пределах их углов (конусов) трения α, включают привод 24-27 (см. фиг.14, 22). Рейка 26 выдвигается, увлекая за собой рамную часть 3. Привод 24-27 выключают при выдвижении последней до значения колесной базы L1 (см. фиг.22). Тем самым вводят оси передних по ходу (в данном случае - верхних) колес 4 в пределы их новых углов трения α еще до достижения колесами 4 положения статического равновесия. С этого момента в условиях примерно равной вертикальной нагрузки на оси (развесовки) по осям колес 4 и 5 обеспечивается сцепление колес 4 со ступенью, достаточное для удержания транспортного средства при "подтягивании" (подъеме) колес 5 (вне углов трения α). Вторая, последняя, операция цикла (указанное "подтягивание") заключается в остановке (торможении) колес 4 и переключении привода 24-27 в режим уменьшения колесной базы. Рейка 26 вдвигается, увлекая за собой рамную часть 3 до ввода осей колес 5 в пределы их новых углов (конусов) трения α (см. фиг.23). После остановки (торможения) колес 5 воспроизводят указанную последовательность операций необходимое число раз вплоть до полного преодоления лестничного марша.
Описанная пульсация колесной базы характеризуется симметричной амплитудой относительно среднего значения, предварительно установленного (см. выше процесс трансформации) вращением колес 4, 5 при расфиксированной колесной базе, иначе говоря, при расфиксированной раме 1-3 (об автоматизации процесса пульсации см. ниже).
Во втором частном случае второго варианта способа при непрерывном вращении задних по ходу транспортного средства колес 5 (в данном случае - нижних) в пределах их углов трения α и непрерывном вращении передних по ходу транспортного средства колес 4 (в данном случае - верхних) включают привод 24-27. Рейка 26 выдвигается, увлекая за собой рамную часть 3. Скорость выдвижения рейки 26 превышает скорость поступательного движения осей колес 5, так что за время совершения ими перемещения до упора в торец (кромку) следующей ступени увеличивают таким образом колесную базу от L1 до L2 и оси колес 4 вводят в пределы их новых углов (конусов) трения α еще до достижения ими положения статического равновесия на кромке ступени. С этого момента в условиях примерно равной вертикальной нагрузки на оси колес 4, 5 (развесовки) обеспечивается развитие тяги по сцеплению колес 4, достаточной для подъема колес 5 (вне углов трения) на очередную ступень. Следующая операция цикла заключается в реверсировании привода 24-27 в режим уменьшения колесной базы. Рейка 26 вдвигается, увлекая за собой рамную часть 3 до ввода осей колес 5 в пределы их новых углов (конусов) трения α. Не останавливая колеса 4, 5, воспроизводят указанную последовательность операций с пульсацией базы от L1 до L2 необходимое число раз до полного преодоления лестничного марша.
Здесь, как и в первом варианте способа, справедливы замечания о среднем значении колесной базы, устанавливаемом на этапе трансформации.
Пульсация колесной базы в автоматическом режиме осуществляется следующим образом (при подъеме транспортного средства на лестничном марше способом с постоянно вращающимися колесами 4, 5).
При реализации силы тяги по сцеплению на нижних колесах 5 выдвижение рейки 26 привода 24-27 вызывает увеличение базы L при силовом упоре пальца 28 в левую часть стенки отверстия 29, т.е. при зазоре минус δ (см. фиг.14, 25). Приводы 8 нижних колес 5 совместно с приводом 24-27 толкают оси верхних колес 4 в условиях невозможности реализации на них силы тяги по сцеплению (пока они вне угла трения α на кромке очередной ступени).
В момент ввода (попадания) осей колес 4 в угол трения α на кромке ступени (см. фиг.26) начинается реализация их силы тяги по сцеплению при постоянно работающих приводах 7. Это вызывает перераспределение продольных сил в системе 1-5 и перекладку зазора δ с минуса на плюс. Все колеса 4, 5 с этого момента работают в ведущем режиме и потребность в "помощи" привода 24-27 отпадает.
Однако к этому времени или с некоторой задержкой во времени колеса 5 доходят до упора в очередную ступень, теряют сцепление и самостоятельно подняться не могут (см. фиг.26).
Разомкнувшиеся при перекладке зазора δ контакторы выключателя 30 через систему управления реверсируют привод 24-27. Рейка 26 начинает вдвигаться, увлекая за собой рамную часть 3 с колесами 5 в их пассивном режиме. Приводы 7 верхних колес 4 совместно с приводом 24-27 тянут оси нижних колес 5 (см. фиг.27).
В момент ввода (попадания) осей колес 5 в угол трения α на кромке ступени (см. фиг.28) начинается реализация их силы тяги по сцеплению при постоянно работающих приводах 8. Это вновь вызывает перераспределение продольных сил в системе 1-5 и перекладку зазора δ с плюса на минус. Опять все колеса 4, 5 начинают работать в ведущем режиме.
Далее процесс повторяется до преодоления лестничного марша.
В описанных выше случаях реализации второго варианта способа передвижение могут осуществлять при любом фиксированном значении L* колесной базы из диапазона от L1 до L2, соответствующего заштрихованной зоне на фиг.15. Выбор конкретного значения (точки в пределах указанной "допустимой" зоны) определяется условиями эксплуатации в конкретных случаях.
В частности, рамную часть 1 фиксируют при среднеарифметическом значении L*=0,5 (L1+L2) при любом расчетном значении коэффициента сцепления ϕ. Среднее положение точки в "допустимом" диапазоне гарантирует проходимость на лестничных маршах с максимально широким диапазоном
возможного изменения условий эксплуатации (прежде всего по ϕ). Изменяя положение (позицию) фиксатора 27 относительно рамной части 3 (на фиг.14 - введением пальца 28 в то или иное отверстие 29), изменяют (выбирают) постоянную составляющую L при сохранении максимально возможного (по характеристике привода 24-27) диапазона пульсации базы L2-L1. Иначе говоря, смещают диапазон L2-L1=const в ту или иную сторону.
Преодоление "трансскутером" лестничного марша задним ходом производят аналогично, но "трансскутер" трансформируют так же, как для осуществления движения вниз по лестнице. Для движения вниз по лестничному маршу передний и задний колесные мосты выдвигают аналогично заднему и переднему мостам при движении вверх соответственно, вследствие чего центр масс "автоматически" смещается ближе к верхним (задним) колесам 5. Работой приводов 39, 41 и 38, 40 кресло 9-12 устанавливают горизонтально и одновременно в еще большей степени смещают назад. Этим обеспечивается примерно равная вертикальная нагрузка на оси колес 4, 5 (развесовка). Рулевую колонку 15 устанавливают на этот раз с наклоном к креслу 9-12 от вертикального ее положения и выдвигают руль 16 до эргономичного уровня.
Процесс взаимодействия колес 4, 5 со ступенями лестничного марша при спуске (см. фиг.18) не вызывает особых проблем в отличие от подъема.
Вполне возможна реализация (особенно при наличии гироскопического стабилизатора 34) дополнительной функции преодоления лестничного марша вниз при "короткой" колесной базе. Это может оказаться полезным, например, на лестницах с короткими и узкими маршами. В этом случае устанавливают минимальную колесную базу при вертикальном (или почти вертикальном) положении рулевой колонки 15 и при более низком уровне руля 16. Процесс передвижения в регулярном режиме отличается от предыдущего одновременным "охватом" колесной базой меньшего числа ступеней и предпочтительно работой гироскопического стабилизатора 34.
Для придания телу пользователя вертикального положения (см. фиг.19) устанавливают минимальную колесную базу Lmin, вдвигая рамные части 2 и 3 в балку 21 за счет работы тяговых приводов 7 и 8 в разных скоростных режимах при временно отключенных фиксаторах 22, 23, 27. Рулевую колонку 15 поворачивают вперед - от кресла 9-12 и фиксируют фиксатором 18 в положении с отклонением от вертикали. Руль 16 поднимают и фиксируют фиксатором 19 на высоте, удобной для опоры руками в процессе перевода и пребывания пользователя в вертикальное положение. При наличии дополнительных фиксаторов тела пользователя (не показаны) их приводят в рабочее состояние (фиксация ног, пояса и т. д. ). Осуществляют перевод тела в вертикальное положение, трансформируя кресло 9-12 в вертикально ориентированную платформу за счет одновременной работы всех приводов независимого наклона элементов кресла (38-43, 47, 48). При этом в устройстве с подвижно установленным источником энергии 13 последний автоматически, отслеживая угол поворота сиденья 9, поворачивается в противоположную сторону (по часовой стрелке) за счет работы привода 51. В результате, сиденье 9, спинка 10 и рычаг 11 (приводы 47, 48) занимают положение в пределах одной общей для них вертикальной плоскости с коррекцией на эргономические требования и физиологические особенности пользователя (с учетом формы подушек сиденья 9 и спинки 10, их деформации и т.д.). После этого переводят систему управления в режим гироскопической стабилизации положения кресла 9-12 (с использованием гироскопического стабилизатора 34). В этом случае пользователь находится в вертикальном положении тела и опирается кистями рук на руль 16, а его лицо расположено на уровне лиц собеседников (на уровне книг на стеллажах библиотеки, на уровне выбираемых в магазине продуктов и т.д.). Коленные и другие суставы находятся под нагрузкой (если дополнительные фиксаторы тела не исключают этого). Статическая и динамическая устойчивость кресла-платформы 9-12 обеспечивается двухплоскостной гироскопической стабилизацией (см. фиг.8) за счет автоматической отработки углов отклонения приводами 38, 40, 39, 41 (в продольном направлении аналогично устройству-аналогу [3]) и приводами 32, 33 подвески 31 колес 5 (в поперечном направлении). Уровень расположения тела регулируют (вверх-вниз) за счет работы приводов 47, 48 опор для ног: подвижные звенья этих приводов увлекают за собой подпятники 12. При этом транспортное средство может находиться как в статическом положении (как правило), так и в движении на относительно ровной местности. При движении используют увеличенную колесную базу L и изменяют положение рулевой колонки 15 с рулем 16. Передний мост 2, 4 выдвигают (выкатывают) из балки 21, а кресло-платформу 9-12 перемещают назад за счет работы приводов 38-41. Колонку 15 поворачивают в ту же сторону, ближе к вертикали. Корректируют положение руля 16. Этот режим (функция) предполагает, главным образом, передвижение, например, в магазине, передвижение и остановки на относительно неровной местности и т.д.
Для размещения заявляемого транспортного средства в автомобиле (см. фиг. 20) увеличивают значение L вплоть до максимального за счет работы тяговых приводов 7, 8 при временно отключенных фиксаторах 22, 23, 27. Иначе говоря, путем выдвижения (выкатывания) обоих колесных мостов. Опускают заднюю часть рамы 1-3 почти до опорной поверхности (т.е. задают дифферент на задний мост) за счет синхронной работы приводов 32, 33. Опускают ("утапливают") кресло 9-12 в крайнее нижнее положение между колесными мостами за счет работы привода фиксации и изменения положения кресла (главным образом, приводов 39, 41). Рулевую колонку 15 с рулем 16 переводят в сложенное нерабочее положение с предельным наклоном к сиденью 9.
Описанная трансформация может производиться около автомобиля, после чего "трансскутер" с сидящим в нем пользователем помещают на предварительно освобожденное от штатного автомобильного сиденья место за рулем автомобиля (это может сделать и сам пользователь). При этом рекомендуется использование приспособления, в частности, в составе автомобиля при его незначительной модернизации. В принципе, не исключена полная или частичная трансформация не рядом, а непосредственно в автомобиле. Таким образом, "трансскутер" начинает выполнять функцию автомобильного сиденья.
Заявляемое транспортное средство может быть размещено в мотоносителе (см. фиг.21).
Источники информации
1. Chairman Mini Stander (Permobil): Permobil, lnc.,6B Gill Street, Woburn, M 01801 1-888-PERMOBIL, Switzerland.
2. Патент США 5975225 по кл. В 62 D 06/12, опубликован 02.11.1999.
3. Independence Technology, a Johnson and Johnson company - Home Page: http: //www. indetech. com/Call 1-888-IND-3000.-03.09.99;
Independence TM 3000-Product Information: http: // www. indetech. com/productfunction. html.- 03.09.99. RU, 2115401 C1, 20.07.98, A 61 G 5/06.
4. Патент РФ 2058766 по кл. А 61 G 5/06, опубликован 27.04.1996.
5. Патент РФ 2115401 по кл. А 61 G 5/06, опубликован 20.07.1998.
6. Патент РФ 2116061 по кл. A 61 G 5/06, опубликован 27.07.1998.
7. Самойлов А.Д., Семенов А. Г., Элизов А.Д. Разработка концепции универсального малогабаритного шасси высокой проходимости. //Известия ВУЗов. Машиностроение, 1998, 1-3. - С. 88-94.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПОДЪЕМА ПО ЛЕСТНИЧНЫМ МАРШАМ | 2001 |
|
RU2215510C2 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА С ДИСФУНКЦИЕЙ НИЖНИХ КОНЕЧНОСТЕЙ В САМОХОДНОЙ КОЛЯСКЕ НА ЛЕСТНИЦЕ С ПОРУЧНЯМИ | 2010 |
|
RU2417787C1 |
| ТРАНСФОРМИРУЕМОЕ КРЕСЛО ПРЕИМУЩЕСТВЕННО ИНДИВИДУАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2210349C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2558338C1 |
| УСТРОЙСТВО ДЛЯ РАЗМЕЩЕНИЯ ИНДИВИДУАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА С ЧЕЛОВЕКОМ ЗА РУЛЕМ АВТОМОБИЛЯ | 2000 |
|
RU2179938C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| САМОХОДНОЕ ИНВАЛИДНОЕ КРЕСЛО | 1996 |
|
RU2115401C1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ САМОХОДНОГО ИНВАЛИДНОГО КРЕСЛА ПО ЛЕСТНИЧНЫМ МАРШАМ | 1996 |
|
RU2116061C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |






















Изобретение относится к транспортным средствам, предназначенным для подъема по ступеням. Кресло смещают в сторону подъема лестницы до, примерно, равной вертикальной нагрузки на колеса. Согласно первому варианту способа подъем по лестнице при зафиксированной телескопической раме происходит следующим образом. Устанавливают среднее значение колесной базы в диапазоне от L1 до L2. Формула расчета L1, L2 приведена в описании. Выбор среднего значения из диапазона от L1 до L2 обеспечивает оптимальные условия развития необходимой тяги по сцеплению одной пары колес, достаточной для поднятия другой пары колес на очередную ступень. После фиксации телескопической рамы вращают все колеса. Второй вариант способа подъема при подвижной телескопической раме в диапазоне от L1 до L2 происходит следующим образом. При нахождении задних колес (5) в пределах их углов трения на ступени и вращении передних колес раздвигают раму до ввода передних колес (4) в пределы углов (α) трения колес с очередной ступенью. Затем сдвигают раму при нахождении передних колес в пределах углов трения до ввода перемещающихся задних колес в пределы углов трения колес с очередной ступенью. Рама может быть максимально раздвинута для обеспечения скоростного движения по дороге общего пользования. Предлагаемое техническое решение направлено на ускорение подъема по лестнице при возможности использования в качестве скоростного транспортного средства. 3 с. и 16 з.п.ф-лы, 28 ил.

где l - длина ступени лестничного марша, см;
h - высота ступени лестничного марша, см;
R - радиус колеса, см;
α≤arctgϕ - угол трения как функция коэффициента сцепления ϕ колеса со ступенью.
| САМОЙЛОВ А.Д | |||
| и др | |||
| Разработка концепции универсального малогабаритного шасси высокой проходимости | |||
| Известия ВУЗов | |||
| Машиностроение, 1998, №1-3, с.88-94 | |||
| ИЕРАРХИЧЕСКАЯ СИСТЕМА АССОЦИАТИВНОЙ ПАМЯТИ | 1992 |
|
RU2025795C1 |
| US 5964473, 12.10.1999 | |||
| DE 3146009 А1, 01.06.1983 | |||
| DE 19816879 A1, 21.10.1999 | |||
| US 5507513, 16.04.1996 | |||
| RU 2055561 С1, 10.03.1996. | |||
