Изобретение относится к космической технике и может быть использовано для управления низкоорбитальными космическими аппаратами связи (КАС) типа «Гонец».
Известны способы и системы для управления космическими аппаратами (КА) на основе контура управления с использованием телеметрических сигналов для передачи по каналам связи, включающие информационные датчики, бортовые и наземные радиопередатчики и радиоприемники, устройства декодирования, регистрирующие устройства (см., например, патент РФ №2134488; книга «Современная телеметрия в теории и на практике», Назаров А.В., изд. «Наука и техника», Санкт-Петербург, 2007 стр. 27, 181).
Наиболее близким аналогом, выбранным в качестве прототипа заявленного изобретения, является способ управления бортовой аппаратурой, реализованный в радиотехническом комплексе сравнительно простых КА связи (КАС) «Гонец», включающий традиционную телеметрическую систему для передачи цифровых сигналов по каналам связи (см., например, патент РФ №2440677), используемую в технологическом контуре управления (ТКУ) КА.
ТКУ для низкоорбитальных КАС связи, характеризуется относительной простотой и высокой надежностью. Этот контур основан на замкнутые через наземный комплекс управления (НКУ) систему телеконтроля и управления бортовыми системами КАС. Обычно операции управления проводятся один раз в несколько суток (от 7 до 30 суток).
Существенным недостатком известных способов и систем управления КАС (в частности и прототипа) является ограниченна оперативность управления КАС при возникновении на его борту широкого спектра быстропротекающих опасных ситуаций, что может привести к снижению эффективности целевого использования КАС или к его потере.
Задачей, решаемой предложенным изобретением, является повышение оперативности управления КАС при возникновении на его борту широкого спектра быстропротекающих опасных ситуаций.
Решение указанной задачи (в части способа) обеспечивается тем, что способ многоконтурного управления КАС, заключающийся в использовании в процессе управления КАС дополнительного контура управления в виде служебного (1-2 сеанса связи на каждом витке по служебной радиолинии) и автономного (управление в реальном масштабе времени с использованием бортового комплекса управления). При этом, последовательно формируют сигналы, пропорциональные скорости и ускорению первичного телеметрического сигнала, устанавливают граничные значения этих сигналов. На основе оперативности передачи сигналов определяют дополнительные оптимальные контура управления. При выходе текущих значений сигналов за установленные граничные значения или по их совокупности определяют оптимальные контура управления, на выходе, каждого из которых формируют по априорным данным сигналы управления КАС.
В части устройства, решение указанной задачи обеспечено тем, что система многоконтурного управления КАС, включающая взаимосвязанные между собой телеметрический датчик, технологический контур управления и исполнительные устройства, согласно изобретению, система дополнительно содержит служебный контур управления, вход которого подключен к выходу телеметрического датчика, а выходы -подключены к другим входам исполнительных устройств космического аппарата и автономный контур управления, состоящий из последовательно подключенных к выходу телеметрического датчика первой и второй дифференцирующих схем, выходы каждой из которых и выход телеметрического датчика подключены к входам соответствующих логических блоков, подключенных через дешифратор к соответствующим входам исполнительных органов космического аппарата.
Предложенное техническое решение позволит обеспечить необходимую для безаварийной работы оперативность управления КАС при возникновении на его борту широкого спектра быстропротекающих опасных ситуаций и повысить эффективность целевого использования КАС.
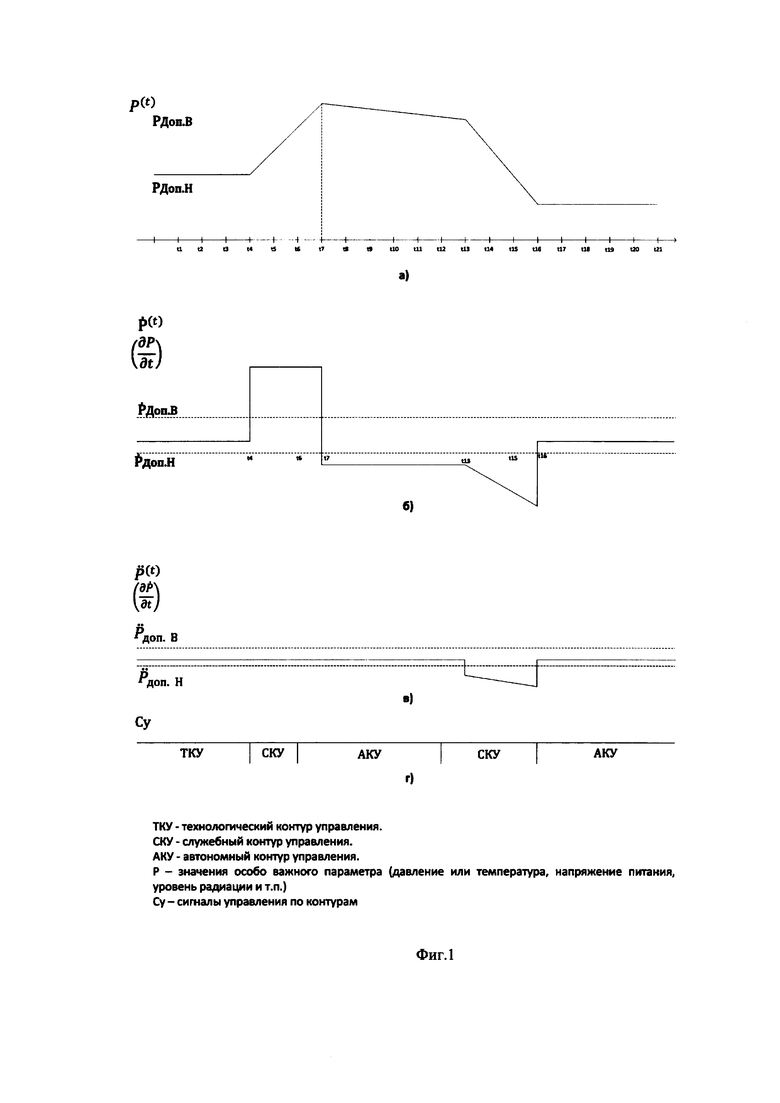
Суть предложенного способа раскрыта на фиг. 1, согласно которой:
1. Задают любой особо важный контролируемый параметр Р (например, температура или давление в рабочем отсеке, напряжение энергопитания бортовых систем, помеховая обстановка и т.д.).
2. Формируют первичный сигнал Р (t), пропорциональный изменяемому значению этого параметра (фиг. 1а).
3. Устанавливают граничные (фиг. 1а) значения изменения этого сигнала (Рдоп.в, Рдоп.н), который по замкнутому через НКУ технологическому контуру управления обеспечивают процесс управления. При этом, на каждое значение первичного сигнала априорно формируют сигналы управления и осуществляют управление КАС.
4. Кроме того, дополнительно используют служебный и автономный контуры управления (СКУ и АКУ).
5. Последовательно формируют сигналы, пропорциональные скорости (фиг. 1б) и ускорению (фиг. 1в) первичного сигнала, устанавливают граничные (допустимые) значения этих сигналов.
6. На основании допустимых значений времени прохождения сигналов, определяют дополнительные оптимальные по своей оперативности контуры управления (при выходе текущих значений сигналов за установленные граничные значения или по их совокупности), на выходе каждого из которых формируют по априорным признакам сигналы управления КАС (фиг. 1г).
Таким образом, в зависимости от складывающейся ситуации на борту КАС, срабатывает алгоритм, позволяющий оперативно выбрать оптимальный (в данной ситуации) контур управления, чем и обеспечивается необходимая реакция системы управления на складывающуюся ситуацию.
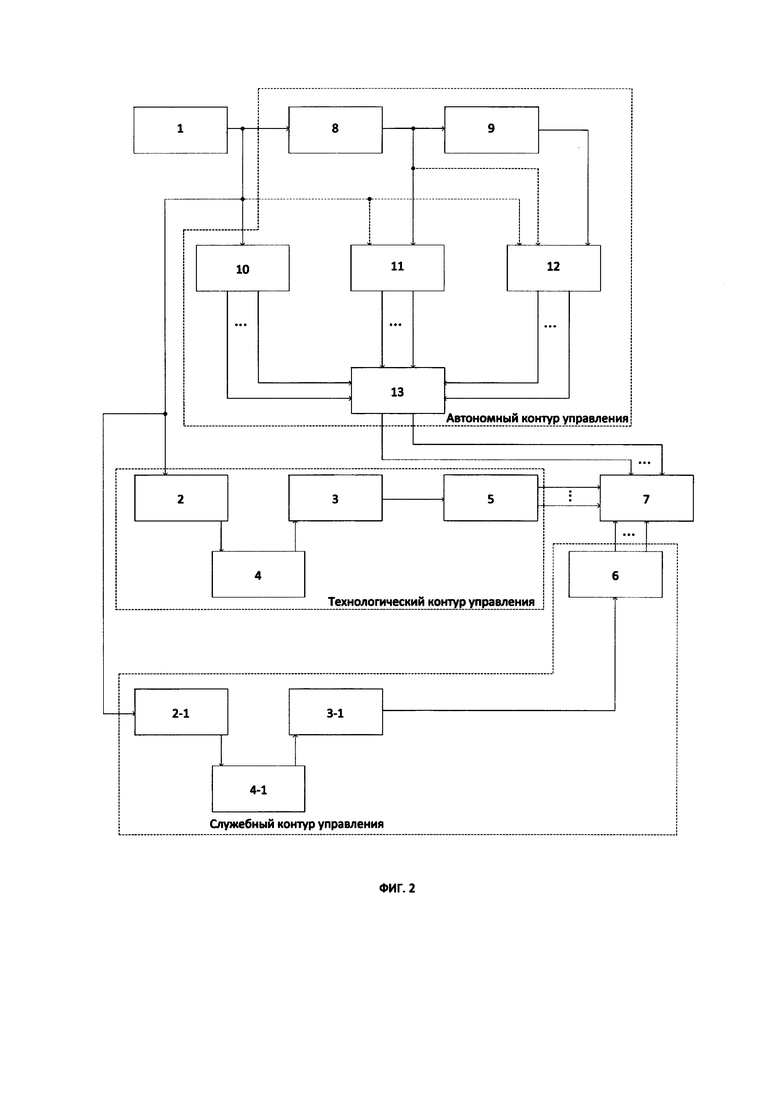
Заявленный способ реализуется посредством предложенной системы, показанной на фиг. 2, где:
Технологический контур управления
1 - Телеметрический датчик особо важного параметра (ТД).
2 - Телеметрическое устройство (ТМУ).
3 - Наземный передатчик (НПРД).
4 - Центр управления полетом (ЦУП).
5 - Бортовой приемник (БПРМ).
Служебный контур управления
2-1 - Телеметрическое устройство (ТМУ).
3-1 - Наземный передатчик (НПРД).
4-1 - Центр управления системой (ЦУС).
6 - Бортовой приемник (БПРМ).
Автономный контур управления
7 - Исполнительные устройства (ИУ) КА.
8 - Дифференцирующая схема 1 (ДС1).
9- Дифференцирующая схема 2 (ДС2).
10 - Логический блок 1 (ЛБ1).
11 - Логический блок 2 (ЛБ2).
12 - Логический блок 3 (ЛБ3).
13 - Дешифратор (ДШ).
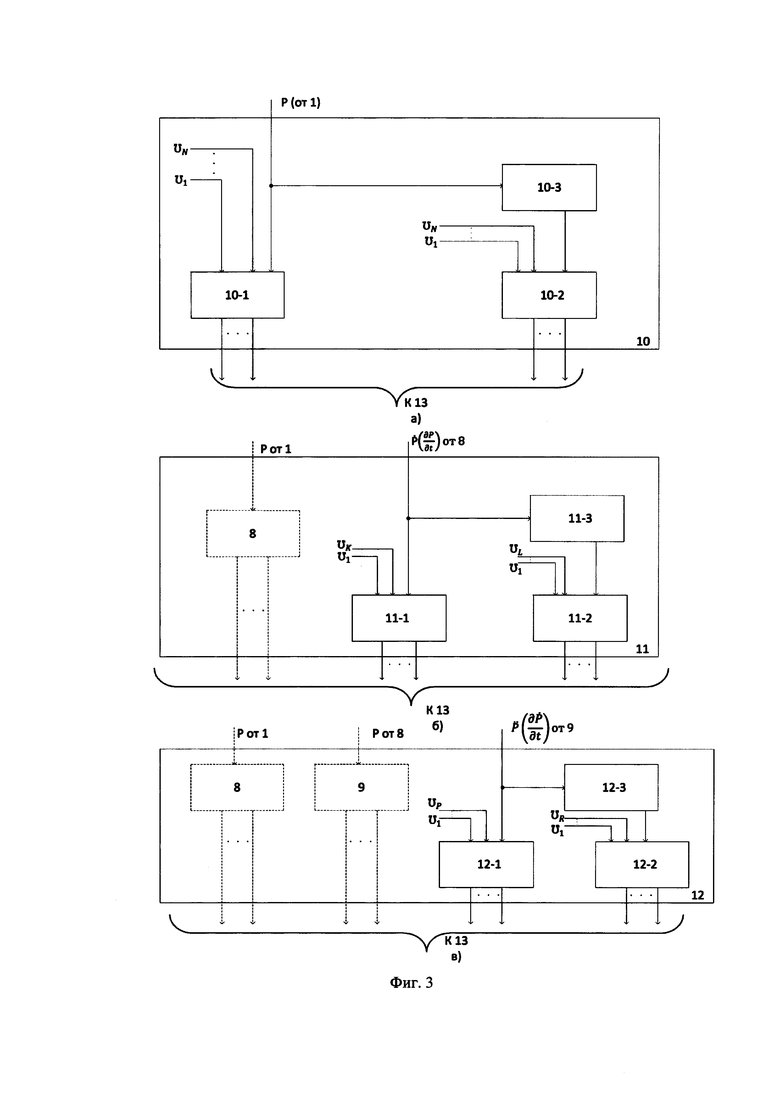
На фиг. 3 в качестве примера представлены варианты схем реализации логического блока (ЛБ), где:
10 - ЛБ1
10-1 - Блок компараторов 1.
10-2 - Блок компараторов 2.
10-3 - Инвертор (Схема НЕ).
11 - ЛБ2
11-1 - Блок компараторов 1.
11-2 - Блок компараторов 2.
11-3 - Инвертор (Схема НЕ).
12 - ЛБ3
12-1 - Блок компараторов 1.
12-2 - Блок компараторов 2.
12-3 - Инвертор (Схема НЕ).
Работа предложенной системы осуществляется следующим образом.
Телеметрический сигнал с выхода ТД (1) поступает на входы ТМУ (2) ТКУ и ТМУ (2-1) АКУ, ЛБ1 (10) и, по необходимости, на другие входы ЛБ2 (11) и ЛБ3 (12), а также на вход последовательно подключенных ДС1 (8) и ДС2 (9) АКУ.
Выход ДС1 (скорость изменения первичного сигнала) поступает на вход ЛБ2 (11) и, по необходимости, на второй другой вход ЛБ3 (12), на вход которого поступает выход ДС2 (ускорение изменения первичного сигнала).
При превышении входных сигналов на входах блоков компараторов 1 и 2 ЛБ (10, 11,12) установленных допустимых порогов (U), на выходе каждого из них формируется определенный позиционный сигнал, совокупность которых поступает на входы ДШ(13). При отрицательных значениях изменения первичного сигнала, его скоростей и ускорений, они через инверторы (10-3, 11-3, 12-3) поступают на входы вторых блоков компараторов (10-2, 11-2, 11-3) ЛБ (10, 11, 12).
Сигналы с выходов ТМУ (2) через ЦУП (4), НПРД (3) и БПРМ (5) ТКУ и ТМУ (2-1) через ЦУС (4-1), НПРД (3-1) и БПРМ (6) СКУ поступают на соответствующие входы ИУ (7) КА, к другим входам которых подключены выходы ДШ (13).
Дифференцирующие схемы широко известны в теории элетро-радио цепей. Компараторы и инверторы являются ключевыми элементами в теории радиоэлектронной техники (см., например В.И. Зубчук «Справочник по цифровой схемотехнике», Киев, изд. Техника, 1990, стр. 36, 42, 53). Указанные компараторы срабатывают при превышении входного сигнала установленного значения на другом их входе. Инверторы меняют полярность входного сигнала на противоположную. Диодная матрица строится по традиционной схеме преобразователей кодов (см. например, А.Г. Алексеенко. Основы микросхемотехники. Сов радио, 1973, стр. 103-105).
Использование предложенного технического решения позволит обеспечить необходимую для безаварийной работы оперативность управления КАС при возникновении на его борту широкого спектра быстропротекающих опасных ситуаций и повысить эффективность целевого использования КАС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОТОЙ МОДЕМА МАЛОРАЗМЕРНОГО КОСМИЧЕСКОГО АППАРАТА С НАЗЕМНЫМ ЦЕНТРОМ УПРАВЛЕНИЯ ПОЛЕТАМИ СПУТНИКОВОЙ СВЯЗНОЙ СИСТЕМЫ | 2012 |
|
RU2520352C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ТЕРМОРЕГУЛИРОВАНИЯ РАДИАЦИОННЫХ ПАНЕЛЕЙ КОСМИЧЕСКОГО АППАРАТА ПРИ СБОЯХ И ОТКАЗАХ ДАТЧИКОВ ТЕМПЕРАТУР | 2015 |
|
RU2586783C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАГРЕВАТЕЛЯМИ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2571728C1 |
| СИСТЕМА УПРАВЛЕНИЯ, СБОРА И ОБРАБОТКИ ДАННЫХ С БОРТОВОЙ РЕГИСТРИРУЮЩЕЙ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2498399C1 |
| СПОСОБ ОБРАБОТКИ И ПРЕОБРАЗОВАНИЯ ИНФОРМАЦИИ ТЕЛЕМЕТРИЧЕСКОГО КОНТРОЛЯ, ОСУЩЕСТВЛЯЕМЫЙ ИЗМЕРИТЕЛЬНЫМ МОДУЛЕМ СИГНАЛЬНОЙ ИНФОРМАЦИИ | 2021 |
|
RU2771635C1 |
| Способ телеметрического контроля для управления низкоорбитальными космическими аппаратами связи и устройство для его реализации | 2015 |
|
RU2611855C2 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| Устройство терморегулирования космического аппарата | 2018 |
|
RU2676596C1 |
| Способ управления ориентацией космического аппарата | 2021 |
|
RU2760818C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2018 |
|
RU2692301C1 |
Группа изобретений относится к способу и системе многоконтурного управления космическими аппаратами связи (КАС). Для управления КАС выбирают контролируемые параметры, формируют первичные сигналы, на основании которых через наземный контур управления и при необходимости дополнительные контуры управления формируют сигналы управления. Система содержит телеметрический датчик, технологический контур управления и исполнительные устройства, служебный контур управления и автономный контур управления, соединенные определенным образом. Обеспечивается повышение оперативности управления КАС при возникновении на его борту широкого спектра быстропротекающих опасных ситуаций. 2 н.п. ф-лы, 3 ил.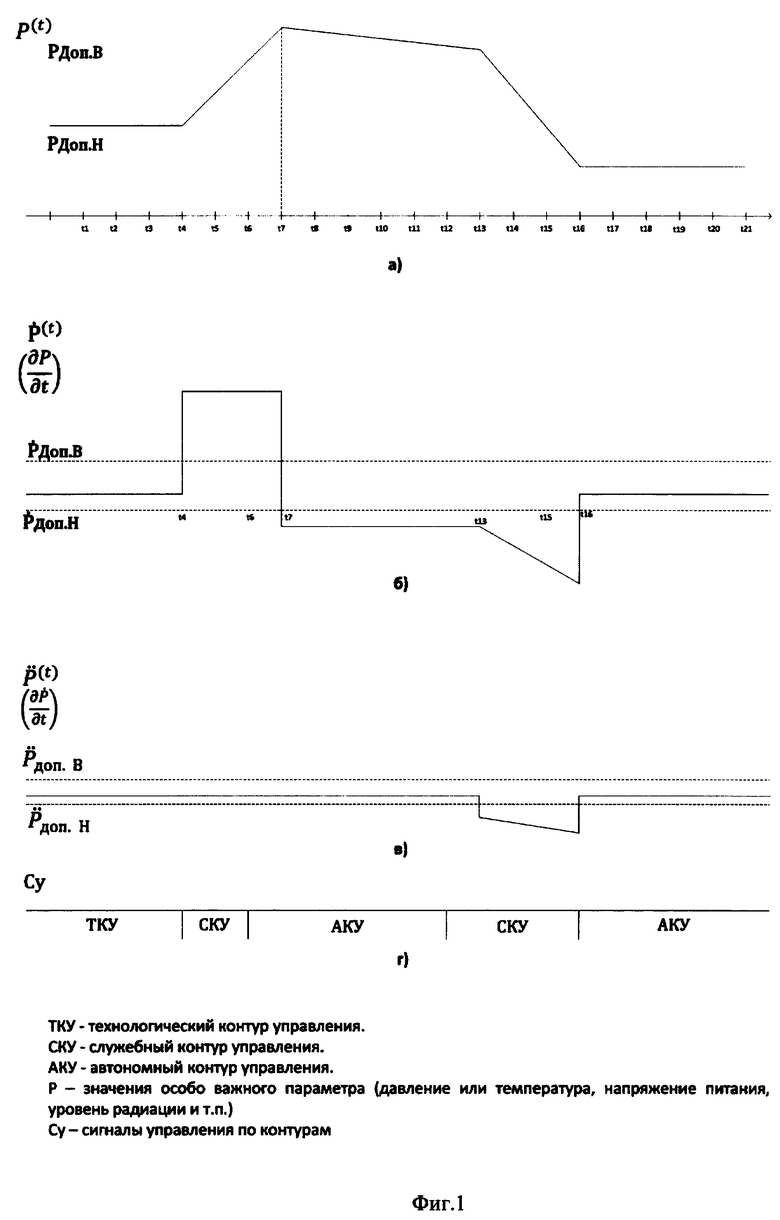
1. Способ многоконтурного управления космическими аппаратами связи, при котором используют технологический контур управления, выбирают особо важный контролируемый параметр, формируют первичный сигнал, пропорциональный изменяемому значению этого параметра, устанавливают граничные значения изменения этого сигнала, который по замкнутому через наземный комплекс управления технологическому контуру управления осуществляет процесс управления, на каждое значение первичного сигнала априорно формируют сигналы управления и осуществляют управление космическим аппаратом, отличающийся тем, что дополнительно используют служебный и автономный контуры управления, последовательно формируют сигналы, пропорциональные скорости и ускорению первичного сигнала, устанавливают граничные значения этих сигналов, определяют дополнительные оптимальные по скорости контуры управления, при выходе текущих значений сигналов за установленные граничные значения или по их совокупности определяют оптимальные контуры управления, на выходе каждого из которых по априорным признакам формируют сигналы управления космическим аппаратом.
2. Система многоконтурного управления космическим аппаратом связи, реализующая способ по п. 1, включающая взаимосвязанные между собой телеметрический датчик, технологический контур управления и исполнительные устройства, отличающаяся тем, что она дополнительно содержит служебный контур управления, вход которого подключен к выходу телеметрического датчика, а выходы подключены к другим входам исполнительных устройств космического аппарата, и автономный контур управления, состоящий из последовательно подключенных к выходу телеметрического датчика первой и второй дифференцирующих схем, выходы каждой из которых и выход телеметрического датчика подключены к входам соответствующих логических блоков, подключенных через дешифратор к соответствующим входам исполнительных органов космического аппарата.
| Способ телеметрического контроля для управления низкоорбитальными космическими аппаратами связи и устройство для его реализации | 2015 |
|
RU2611855C2 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ПОЛОЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2508558C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| СПОСОБ ГЛОБАЛЬНОЙ НИЗКООРБИТАЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2570833C1 |
| US 0006002916 A1, 14.12.1999. | |||

