Изобретение относится к космонавтике, в частности к области выведения космического аппарата (КА) на орбиту искусственного спутника планеты (ИСП) с использованием аэродинамического торможения.
Известен ряд способов перевода КА на орбиты ИСП, описанных в книге - Н.М.Иванов, А.И.Мартынов. «Движение космических летательных аппаратов в атмосферах планет». М.: Наука, Главная редакция физико-математической литературы, 1985, стр.220-377 - (Д1). Можно выделить три возможных способа перевода КА на орбиту ИСП.
Способ перевода с помощью двигателя большой тяги (Д1, стр.222), заключающийся в формировании требуемой орбиты ИСП активным путем. Недостатком этого способа является большое потребление топлива.
Способ перевода с помощью двигателя малой тяги (Д1, стр.222), заключающийся в формировании требуемой орбиты ИСП активным путем, но с использованием двигателя малой тяги, которые имеют более высокие значения удельного импульса, который и обеспечивает формирование требуемой орбиты ИСП. Недостатком данного способа является слишком большое время перехода, что приводит к необходимости предварительного торможения КА двигателем большой тяги, что также приводит к большому потреблению топлива.
Наиболее близким по совокупности существенных признаков и достигаемому результату к заявляемому изобретению является способ перевода КА на орбиту ИСП с использованием предварительного аэродинамического торможения КА атмосферой планеты и последующим формированием требуемой орбиты ИСП активным путем (Д1, стр.222-252), который и выбран прототипом. Данный способ управления выведением космического аппарата на орбиту искусственного спутника планеты заключается в подлете космического аппарата в заданном коридоре входа в атмосферу планеты, определении в i-ые, где i=1, 2, …, N, моменты времени параметров движения космического аппарата, а именно: его скорости - Vi, угла наклона вектора скорости КА к местному горизонту для траектории его движения - θi, радиуса - вектора - ri, плотности атмосферы - ρi, при этом определение параметров движения космического аппарата осуществляют на участке движения в атмосфере планеты, обеспечении входа космического аппарата в атмосферу с величиной угла крена γ около 0 рад и значением угла атаки космического аппарата около α*, соответствующим максимальному значению аэродинамического качества космического аппарата, управлении величиной угла крена космического аппарата γ до вылета из атмосферы, в определении скорости движения космического аппарата в апоцентре переходной эллиптической орбиты - Vα и осуществлении подачи разгонного импульса характеристической скорости - ∆V в апоцентре переходной эллиптической орбиты движения космического аппарата для формирования орбиты с заданными параметрами.
Недостатком этого способа является низкая эффективность предварительного аэродинамического торможения КА атмосферой планеты вследствие управления аэродинамическим качеством КА только за счет изменения угла крена КА γ до его вылета из атмосферы планеты.
Технический результат изобретения заключается в повышении эффективности предварительного аэродинамического торможения КА атмосферой планеты вследствие управления аэродинамическим качеством КА не только за счет изменения угла крена КА γ, но и управлением по определенному алгоритму значением угла атаки КА α, до его вылета из атмосферы планеты.
Указанный технический результат достигается тем, что в известном способе управления выведением космического аппарата на орбиту искусственного спутника планеты, заключающемся в подлете космического аппарата в заданном коридоре входа в атмосферу планеты, определении в i-ые, где i=1,2,…, N, моменты времени параметров движения космического аппарата, а именно: его скорости - Vi, угла наклона вектора скорости КА к местному горизонту для траектории его движения - θi, радиуса - вектора - ri, плотности атмосферы - ρi, при этом определение параметров движения космического аппарата осуществляют на участке движения в атмосфере планеты, обеспечении входа космического аппарата в атмосферу с величиной угла крена γ около 0 рад и значением угла атаки космического аппарата около α*, соответствующим максимальному значению аэродинамического качества космического аппарата, управлении величиной угла крена космического аппарата γ до вылета из атмосферы, в определении скорости движения космического аппарата в апоцентре переходной эллиптической орбиты - Vα и осуществлении подачи разгонного импульса характеристической скорости - ΔV в апоцентре переходной эллиптической орбиты движения космического аппарата для формирования орбиты с заданными параметрами, дополнительно в i-ые, где i=N+1, N+2,…, N+L, моменты времени на участке аэродинамического торможения прогнозируют на момент выхода космического аппарата из атмосферы планеты значения скорости космического аппарата - Vk и угла наклона вектора скорости к местному горизонту для траектории движения КА-θk при движении космического аппарата на оставшихся участках полета в атмосфере планеты, соответственно с величиной угла крена космического аппарата γ, равной 0 рад, и γ, равной π, также прогнозируют на момент выхода космического аппарата из атмосферы планеты значения высот апоцентров переходных эллиптических орбит hα1 и hα2 при движении космического аппарата на оставшихся участках полета в атмосфере планеты, соответственно с величиной угла крена космического аппарата γ, равной 0 рад, и γ, равной π рад, в соответствии с математическими зависимостями:



где:

Vi, θi, ri и ρi - текущие значения скорости КА, угла наклона вектора скорости КА к местному горизонту для траектории его движения, радиуса-вектора и плотности атмосферы соответственно;
rk - значение радиуса-вектора КА в точке выхода КА из атмосферы планеты;
R - радиус планеты;
g - ускорение силы тяжести на поверхности планеты;
µ - гравитационный параметр планеты;
Px - приведенная нагрузка на лобовую поверхность космического аппарата;
ρ100 - значение априорной плотности атмосферы на высоте 100 км;
β - логарифмический коэффициент изменения плотности атмосферы от высоты;
m - масса космического аппарата;
S - площадь миделева сечения космического аппарата;
Cx - аэродинамический коэффициент лобового сопротивления космического аппарата,
сравнивают прогнозируемое значение высоты апоцентра hα2, рассчитанное при величине угла крена космического аппарата γ, равной π рад, с заданной высотой формируемой орбиты hα3 и при выполнении условия:
hα2>hα3
увеличивают значение угла атаки космического аппарата α на величину около ∆α', вычисляемую по формуле:
где:
α* - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического качества космического аппарата;
α** - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического коэффициента лобового сопротивления космического аппарата;
hα1 - прогнозируемое значение высоты апоцентра, рассчитанное при величине угла крена космического аппарата γ, равной 0 рад;
hα2 - прогнозируемое значение высоты апоцентра, рассчитанное при величине угла крена космического аппарата γ, равной π рад;
hα3 - заданная высота формируемой орбиты,
сравнивают текущее прогнозируемое значение высоты апоцентра переходной орбиты hα2(ti), рассчитанное при величине угла крена космического аппарата γ, равной π рад, с ее значением, вычисленным на предыдущем временном интервале hα2(ti-1) и при выполнении условия:
hα2(ti)<hα2(ti-1)
устанавливают величину угла крена космического аппарата γ, равную π рад, и уменьшают значение угла атаки космического аппарата α на величину около ∆α”, вычисляемую по формуле:

где:
αi-1 - значение угла атаки космического аппарата, вычисленное на предыдущем временном интервале;
α* - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического качества космического аппарата;
hα2(ti) - текущее прогнозируемое значение высоты апоцентра переходной орбиты, рассчитанное при величине угла крена космического аппарата γ, равной π рад;
hα2(ti-1) - прогнозируемое значение высоты апоцентра переходной орбиты, рассчитанное при величине угла крена космического аппарата γ, равной π рад, на предыдущем временном интервале;
hα3 - заданное значение высоты формируемой орбиты,
сравнивают прогнозируемое значение высоты апоцентра hα2, рассчитанное при величине угла крена космического аппарата γ, равной π рад, с заданной высотой формируемой орбиты hα3 и при выполнении условия:
hα2=hα3
устанавливают значение угла атаки космического аппарата, равное около α*, соответствующее максимальному значению аэродинамического качества космического аппарата, и при этом установленном значении угла атаки космического аппарата, равном около α*, осуществляют его вылет из атмосферы планеты с последующей подачей разгонного импульса характеристической скорости в апоцентре переходной орбиты движения космического аппарата.
Величину разгонного импульса характеристической скорости в апоцентре переходной эллиптической орбиты движения космического аппарата ∆V вычисляют по известной формуле:

где:
µ - гравитационный параметр планеты;
r(π) - высота перицентра формируемой орбиты;
r(α) - высота апоцентра формируемой орбиты;
Vα - скорость движения КА в апоцентре переходной эллиптической орбиты движения космического аппарата.
Сущность заявленного способа заключается в управлении аэродинамическим качеством КА не только за счет изменения его угла крена γ, но и управления значением угла атаки КА α по определенному алгоритму до его вылета из атмосферы планеты. При этом способ управления выведением космического аппарата на орбиту искусственного спутника планеты заключается в подлете космического аппарата в заданном коридоре входа в атмосферу планеты, определении в i-ые, где i=1,2,…, N, моменты времени параметров движения космического аппарата, а именно: его скорости - Vi, угла наклона вектора скорости КА к местному горизонту для траектории его движения - θi, радиуса-вектора - ri, плотности атмосферы - ρi, при этом определение параметров движения космического аппарата осуществляют на участке движения в атмосфере планеты, обеспечении входа космического аппарата в атмосферу с величиной угла крена γ около 0 рад и значением угла атаки космического аппарата около α*, соответствующим максимальному значению аэродинамического качества космического аппарата, управлении величиной угла крена космического аппарата γ до вылета из атмосферы, в определении скорости движения космического аппарата в апоцентре переходной эллиптической орбиты - Vα и осуществлении подачи разгонного импульса характеристической скорости - ΔV в апоцентре переходной эллиптической орбиты движения космического аппарата для формирования орбиты с заданными параметрами, при этом в i-ые, где i=N+1, N+2,…, N+L, моменты времени на участке аэродинамического торможения прогнозируют на момент выхода космического аппарата из атмосферы планеты значения скорости космического аппарата - Vk и угла наклона вектора скорости к местному горизонту для траектории движения КА - θk при движении космического аппарата на оставшихся участках полета в атмосфере планеты, соответственно с величиной угла крена космического аппарата γ, равной 0 рад, и γ, равной π, также прогнозируют на момент выхода космического аппарата из атмосферы планеты значения высот апоцентров переходных эллиптических орбит hα1 и hα2 при движении космического аппарата на оставшихся участках полета в атмосфере планеты, соответственно с величиной угла крена космического аппарата γ, равной 0 рад, и γ, равной π рад, в соответствии с математическими зависимостями:

где:

Vi, θi, ri и ρi - текущие значения скорости КА, угла наклона вектора скорости КА к местному горизонту для траектории его движения, радиуса -вектора и плотности атмосферы соответственно;
rk - значение радиуса - вектора КА в точке выхода КА из атмосферы планеты;
R - радиус планеты;
g - ускорение силы тяжести на поверхности планеты;
µ - гравитационный параметр планеты;
Px - приведенная нагрузка на лобовую поверхность космического аппарата;
ρ100 - значение априорной плотности атмосферы на высоте 100 км;
β - логарифмический коэффициент изменения плотности атмосферы от высоты;
m - масса космического аппарата;
S - площадь миделева сечения космического аппарата;
Cx - аэродинамический коэффициент лобового сопротивления космического аппарата,
сравнивают прогнозируемое значение высоты апоцентра hα2, рассчитанное при величине угла крена космического аппарата γ, равной π рад, с заданной высотой формируемой орбиты hα3 и при выполнении условия:
hα2>hα3
увеличивают значение угла атаки космического аппарата α на величину около ∆α', вычисляемое по формуле:
где:
α* - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического качества космического аппарата;
α** - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического коэффициента лобового сопротивления космического аппарата;
hα1 - прогнозируемое значение высоты апоцентра, рассчитанное при величине угла крена космического аппарата γ, равной 0 рад;
hα2 - прогнозируемое значение высоты апоцентра, рассчитанное при величине угла крена космического аппарата γ, равной π рад;
hα3 - заданная высота формируемой орбиты,
сравнивают текущее прогнозируемое значение высоты апоцентра переходной орбиты hα2(ti), рассчитанное при величине угла крена космического аппарата γ, равной π рад, с ее значением, вычисленным на предыдущем временном интервале hα2(ti-1) и при выполнении условия:
hα2(ti)<hα2(ti-1)
устанавливают величину угла крена космического аппарата γ, равную π рад, и уменьшают значение угла атаки космического аппарата α на величину около ∆α”, вычисляемую по формуле:
где:
αi-1 - значение угла атаки космического аппарата, вычисленное на предыдущем временном интервале;
α* - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического качества космического аппарата;
hα2(ti) - текущее прогнозируемое значение высоты апоцентра переходной орбиты, рассчитанное при величине угла крена космического аппарата γ, равной π рад;
hα2(ti-1) - прогнозируемое значение высоты апоцентра переходной орбиты, рассчитанное при величине угла крена космического аппарата γ, равной π рад, на предыдущем временном интервале;
hα3 - заданное значение высоты формируемой орбиты,
сравнивают прогнозируемое значение высоты апоцентра hα2, рассчитанное при величине угла крена космического аппарата γ, равной π рад, с заданной высотой формируемой орбиты hα3 и при выполнении условия:
hα2=hα3
устанавливают значение угла атаки космического аппарата, равное около α*, соответствующее максимальному значению аэродинамического качества космического аппарата, и при этом установленном значении угла атаки космического аппарата, равном около α*, осуществляют его вылет из атмосферы планеты с последующей подачей разгонного импульса характеристической скорости в апоцентре переходной орбиты движения космического аппарата.
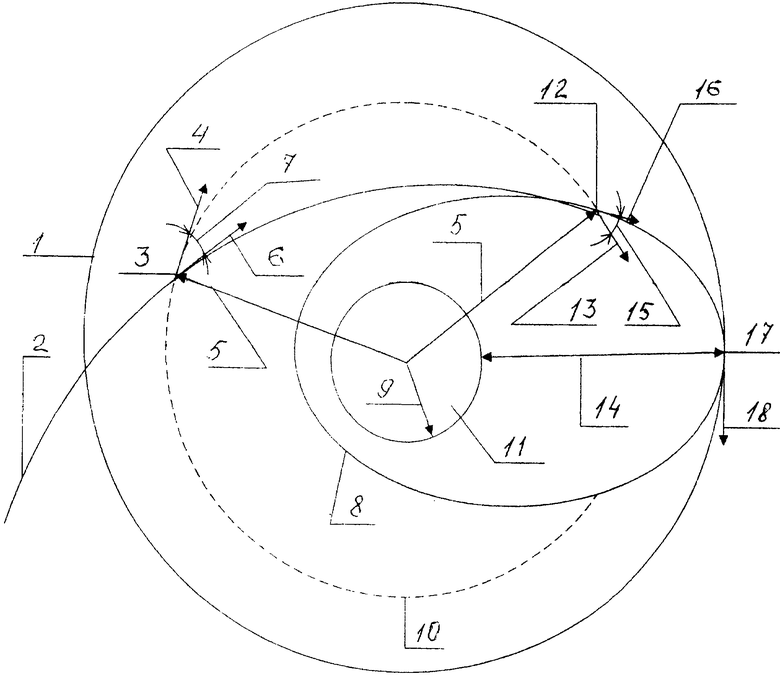
Заявленный способ управления выведением космического аппарата на орбиту искусственного спутника планеты поясняется фигурой, на которой представлены основные этапы выведения КА на орбиту искусственного спутника планеты с использованием предварительного аэродинамического торможения КА атмосферой планеты и последующим формированием требуемой орбиты ИСП активным путем.
На чертеже приняты следующие обозначения:
1 - конечная (заданная) орбита выведения КА,
2 - траектория полета КА,
3 - точка входа КА в атмосферу планеты,
4 - местный горизонт для траектории движения КА в точке его входа в атмосферу планеты,
5 - радиус - вектор - r (расстояние от центра планеты до центра масс КА),
6 - скорость движения КА на момент его входа в атмосферу планеты,
7 - угол наклона вектора скорости КА к местному горизонту для траектории движения КА на момент его входа в атмосферу планеты,
8 - переходная эллиптическая орбита движения КА с высотой апоцентра - hα1, при этом непосредственно КА движется по указанной переходной эллиптической орбите от точки его выхода из атмосферы планеты (позиция - 12) до точки ее апоцентра, где и осуществляется подача разгонного импульса характеристической скорости ∆V,
9 - радиус планеты - R,
10 - условная граница атмосферы планеты,
11 - планета,
12 - точка выхода КА из атмосферы планеты,
13 - местный горизонт для траектории движения КА в точке его выхода из атмосферы планеты,
14 - прогнозируемое значение высоты апоцентра переходной эллиптической орбиты - hα1, рассчитанное при величине угла крена КА γ, равной 0 рад,
15 - прогнозируемое значение угла наклона вектора скорости КА к местному горизонту для траектории его движения на момент его выхода из атмосферы планеты - θk, рассчитанное при величине угла крена КА γ, равной 0 рад,
16 - прогнозируемое значение скорости движения КА на момент его выхода из атмосферы планеты - Vk, рассчитанное при величине угла крена КА γ, равной 0 рад,
17 - точка приложения импульса характеристической скорости ∆V,
18 - импульс характеристической скорости - ∆V.
Дабы не перегружать рисунок, на фигуре не показаны: прогнозируемое значение высоты апоцентра переходной эллиптической орбиты hα2, рассчитанное при величине угла крена КА γ, равной π рад, а также траектория движения КА по переходной эллиптической орбите с высотой апоцентра - hα2 и соответственно прогнозируемое значение угла наклона вектора скорости КА к местному горизонту для траектории движения КА планеты на момент его выхода из атмосферы планеты - θk, рассчитанное при величине угла крена КА γ, равной π рад, и прогнозируемое значение скорости движения КА на момент его выхода из атмосферы планеты - Vk, рассчитанное при величине угла крена КА γ, равной π рад. При этом текущее значение скорости движения КА - Vi в атмосфере планеты также не показано на чертеже.
Однако аналоги перечисленных параметров, рассчитанные при величине угла крена КА γ, равной 0 рад, изображены на чертеже. Таким образом чертеж не потерял своей информативности.
Покажем возможность осуществления изобретения, т.е. возможность его промышленного применения.
Действия по управлению космического аппарата известны и широко описаны в литературе - Н.М.Иванов, А.И.Мартынов «Управление движением космических аппаратов в атмосфере Марса». М.: Наука, Главная редакция физико-математической литературы, 1977, стр.31-87, 258-269 - (Д2).
Признак подлета КА в заданном коридоре входа в атмосферу планеты также известен (см. Д1, стр.30-31, 76-94).
Сведения, подтверждающие возможность получения при осуществлении изобретения, повышение эффективности предварительного аэродинамического торможения КА атмосферой планеты вследствие управления аэродинамическим качеством КА не только за счет изменения угла крена КА γ, но и управлением по определенному алгоритму значением угла атаки КА α, до его вылета из атмосферы планеты, приведены в приложении к материалам заявки, в статье:
«Оптимальное управление КА при выведении на орбиту искусственного спутника Марса», Соколов Н.Л. и др. Федеральное государственное унитарное предприятие «Центральный научно-исследовательский институт машиностроения». Данная статья опубликована в материалах Международного астронавтического конгресса IAC-2012, проходившего 1-5 октября 2012 года в Неаполе, Италия. Английская версия данной статьи приведена в сборнике под номером IAC-12, 3А, 18.р1, х13148 - (Д3).
Примечания.
1. Сведения, подтверждающие возможность получения при осуществлении изобретения технического результата - статья (Д3), заявитель поместил в Приложении к материалам заявки, чтобы излишне не перегружать описание изобретения. При этом следует учесть, что в силу громоздкости и сложности использованного в данной статье математического аппарата ее сокращение не представляется возможным.
2. Заявитель признак «определение в i-ые, где i=1, 2, …, N, моменты времени параметров движения космического аппарата (КА) …» включил в ограничительную часть формулы изобретения, несмотря на то, что в прототипе непосредственно не указано про «определение в i-ые, где i=1, 2, …, N, моменты времени параметров движения КА …». Однако такое определение явным образом следует из текста. Действительно, во-первых, все определения параметров движения КА «привязаны» по времени, а во-вторых, смена информации о параметрах движения КА происходит дискретным образом, то есть в i-ые, где i=1, 2, …, N, моменты времени.
3. Согласно п.2.3.1 Руководства по экспертизе заявок на изобретения от 25.07. 2011 г. использование в формуле изобретения признака «около», при характеристики значений числовых параметров допустимо.
4. Признак по определению величины разгонного импульса характеристической скорости в апоцентре переходной эллиптической орбиты движения космического аппарата ∆V заявитель не включил в формулу изобретения ввиду его известности и естественно не претендует на его защиту. Однако привел его на стр.7 описания для более полного понимания сущности заявленного способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО ВЫВЕДЕНИИ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2014 |
|
RU2575556C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА АКТИВНОМ УЧАСТКЕ ЕГО ВЫВЕДЕНИЯ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2015 |
|
RU2596004C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО ВЫВЕДЕНИИ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2014 |
|
RU2573695C1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537193C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОСАДКЕ В ЗАДАННУЮ ОБЛАСТЬ ПОВЕРХНОСТИ ПЛАНЕТЫ | 2014 |
|
RU2590775C2 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537192C1 |
| Способ формирования группировки космических аппаратов для локального наблюдения заданной области планеты | 2017 |
|
RU2671601C1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТ | 2012 |
|
RU2493059C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| Способ ограничения засорения эксплуатируемых областей околоземного космического пространства | 2017 |
|
RU2665156C1 |
Изобретение относится к управлению движением космического аппарата (КА) при его выведении на орбиту искусственного спутника планеты с использованием аэродинамического маневра. На этапе аэродинамического торможения прогнозируют значения скорости КА, угла ее наклона к местному горизонту и высоты апоцентра переходной орбиты - на момент выхода КА из атмосферы планеты. При этом в каждый из последовательных моментов прогноза рассматривают движение КА на оставшихся участках полета в атмосфере при углах крена γ = 0 рад и γ = π. Для каждого из этих углов находят указанные выше прогнозируемые параметры маневра. Их значения используются при управлении углом атаки КА (вблизи его значения, отвечающего максимальному качеству) и выдачей импульса скорости КА в апоцентре переходной орбиты. Технический результат изобретения состоит в повышении эффективности аэродинамического маневра КА вследствие указанного управления. 1 ил.
Способ управления выведением космического аппарата на орбиту искусственного спутника планеты, заключающийся в подлете космического аппарата в заданном коридоре входа в атмосферу планеты, определении в i-ые, где i=1,2,…, N, моменты времени параметров движения космического аппарата, а именно: его скорости (Vi), угла наклона вектора скорости КА к местному горизонту для траектории его движения (θi), радиуса-вектора (ri), плотности атмосферы (ρi), при этом определение параметров движения космического аппарата осуществляют на участке движения в атмосфере планеты, обеспечении входа космического аппарата в атмосферу с величиной угла крена γ около 0 рад и значением угла атаки космического аппарата около α*, соответствующим максимальному значению аэродинамического качества космического аппарата, управлении величиной угла крена космического аппарата γ до вылета из атмосферы, в определении скорости движения космического аппарата в апоцентре переходной эллиптической орбиты (Vα) и осуществлении подачи разгонного импульса характеристической скорости (ΔV) в апоцентре переходной эллиптической орбиты движения космического аппарата для формирования орбиты с заданными параметрами, отличающийся тем, что в i-ые, где i=N+1, N+2,…, N+L, моменты времени на участке аэродинамического торможения прогнозируют на момент выхода космического аппарата из атмосферы планеты значения скорости космического аппарата (Vk) и угла наклона вектора скорости к местному горизонту для траектории движения КА (θk) при движении космического аппарата на оставшихся участках полета в атмосфере планеты, соответственно с величиной угла крена космического аппарата γ = 0 рад и γ = π рад, также прогнозируют на момент выхода космического аппарата из атмосферы планеты значения высот апоцентров переходных эллиптических орбит hα1 и hα2 при движении космического аппарата на оставшихся участках полета в атмосфере планеты, соответственно с величиной угла крена космического аппарата γ = 0 рад и γ = π рад, в соответствии с математическими зависимостями:
где:
 ,
,
,
,
Vi, θi, ri и ρi - текущие значения скорости КА, угла наклона вектора скорости КА к местному горизонту для траектории его движения, радиуса - вектора и плотности атмосферы соответственно;
rk - значение радиуса - вектора КА в точке выхода КА из атмосферы планеты;
R - радиус планеты;
g - ускорение силы тяжести на поверхности планеты;
µ - гравитационный параметр планеты;
Px - приведенная нагрузка на лобовую поверхность космического аппарата;
ρ100 - значение априорной плотности атмосферы на высоте 100 км;
β - логарифмический коэффициент изменения плотности атмосферы от высоты;
m - масса космического аппарата;
S - площадь миделева сечения космического аппарата;
Cx - аэродинамический коэффициент лобового сопротивления космического аппарата,
сравнивают прогнозируемое значение высоты апоцентра hα2, рассчитанное при величине угла крена космического аппарата γ = π рад с заданной высотой формируемой орбиты hα3 и при выполнении условия:
hα2>hα3
увеличивают значение угла атаки космического аппарата α на величину около ∆α', вычисляемое по формуле:
,
где:
α* - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического качества космического аппарата;
α** - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического коэффициента лобового сопротивления космического аппарата;
hα1 - прогнозируемое значение высоты апоцентра, рассчитанное при величине угла крена космического аппарата γ = 0 рад;
hα2 - прогнозируемое значение высоты апоцентра, рассчитанное при величине угла крена космического аппарата γ = π рад;
hα3 - заданная высота формируемой орбиты,
сравнивают текущее прогнозируемое значение высоты апоцентра переходной орбиты hα2(ti), рассчитанное при величине угла крена космического аппарата γ = π рад с ее значением, вычисленным на предыдущем временном интервале hα2(ti-1) и при выполнении условия:
hα2(ti)<hα2(ti-1)
устанавливают величину угла крена космического аппарата γ = π рад и уменьшают значение угла атаки космического аппарата α на величину около ∆α”, вычисляемую по формуле:
,
где:
αi-1 - значение угла атаки космического аппарата, вычисленное на предыдущем временном интервале;
α* - значение угла атаки космического аппарата, соответствующее максимальному значению аэродинамического качества космического аппарата;
hα2(ti) - текущее прогнозируемое значение высоты апоцентра переходной орбиты, рассчитанное при величине угла крена космического аппарата γ = π рад;
hα2(ti-1) - прогнозируемое значение высоты апоцентра переходной орбиты, рассчитанное при величине угла крена космического аппарата γ = π рад на предыдущем временном интервале;
hα3 - заданное значение высоты формируемой орбиты,
сравнивают прогнозируемое значение высоты апоцентра hα2, рассчитанное при величине угла крена космического аппарата γ = π рад, с заданной высотой формируемой орбиты hα3 и при выполнении условия:
hα2=hα3
устанавливают значение угла атаки космического аппарата около α*, соответствующее максимальному значению аэродинамического качества космического аппарата, и при этом установленном значении угла атаки космического аппарата около α* осуществляют его вылет из атмосферы планеты с последующей подачей разгонного импульса характеристической скорости в апоцентре переходной орбиты движения космического аппарата.
| SU 1811129 A1, 10.10.1996 | |||
| СПОСОБ ДОСТАВКИ ЭКИПАЖА С ПОВЕРХНОСТИ ЗЕМЛИ НА ОКОЛОЛУННУЮ ОРБИТУ И ВОЗВРАЩЕНИЯ С ОКОЛОЛУННОЙ ОРБИТЫ НА ПОВЕРХНОСТЬ ЗЕМЛИ | 2008 |
|
RU2376214C1 |
| RU 2005120143 A, 10.01.2007 | |||
| СПОСОБ ВЫВЕДЕНИЯ НЕСКОЛЬКИХ СПУТНИКОВ НА НЕКОМПЛАНАРНЫЕ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ СИЛЫ ЛУННОГО ПРИТЯЖЕНИЯ | 1997 |
|
RU2219109C2 |
| US 6550720 В2, 22.04.2003 | |||
| US 4903918 A, 27.02.1990 | |||
| US 20050211828 A1, 29.09.2005 | |||
| JP 3153497 A, 01.07.1991 | |||

