Изобретение относится к космонавтике, в частности к области выведения космического аппарата (КА) на орбиту искусственного спутника планеты (ИСП) с использованием аэродинамического торможения в атмосфере и управления тягой двигательной установки.
Актуальность проблемы разработки эффективных способов выведения КА на орбиты ИСП обусловлена тем, что только с помощью орбитальных аппаратов может быть решен ряд исследовательских и научно-прикладных задач, которые принципиально не решаются другими способами. К таким задачам относятся:
- исследование параметров и химического состава верхних слоев атмосферы планет;
- уточнение гравитационных характеристик полей тяготения планет;
- получение и изучение космических снимков поверхности исследуемой планеты и ряд других.
Известен ряд способов выведения КА с подлетной траектории на орбиту ИСП. Принципиально их можно разделить на два класса, предусматривающих проведение только ракетодинамических коррекций движения КА и совмещающих активные участки полета с участками аэродинамического торможения аппарата в атмосфере.
Так, в работе - Эйсмонт Н.А. «Оптимальное управление космическим аппаратом, переводимым с гиперболической траектории на орбиту спутника планеты торможением в атмосфере», Космические исследования, 1972, т. 10, вып. 2, стр. 290-292 - [1] описан способ формирования спутниковых орбит, заключающийся в гашении скорости КА с гиперболической до эллиптической с помощью включений двигательной установки большой тяги. Такой способ наиболее прост в реализации и неоднократно применен при выполнении различных космических миссий.
Основным недостатком такого способа является чрезмерно большое потребление топлива, что приводит к нерациональному массово-габаритному балансу КА и к существенным ограничениям возможностей использования на борту аппарата научной аппаратуры.
Известен способ выведения КА на орбиту ИСП с помощью включения двигателей малой тяги, описанной в работе - Петрухина К.В., Салмин В.В. «Оптимизация баллистических схем перелетов между некомпланарными орбитами с помощью комбинации двигателей большой и малой тяги», Известия Самарского научного центра Российской академии наук, т. 12, №4, 2010, стр. 189-193 - [2]. Такие двигатели имеют более высокие значения удельного импульса, что позволяет снизить потребные энергетические затраты на формирование заданной орбиты ИСП.
Недостатком такого способа является чрезвычайно большое время выведения на заданную орбиту ИСП, что существенно снижает продолжительность эксплуатации КА по целевому применению.
Значительно снизить потребные энергозатраты при выведении КА на спутниковые орбиты при сравнительно малом времени перелета можно путем использования способа, изложенного в работе - Иванов Н.М., Мартынов А.И. «Движение космических летательных аппаратов в атмосферах планет», М.: Наука, 1985, стр. 222-252 - [3] и заключающегося в предварительном аэродинамическом торможении КА в атмосфере планеты и в последующей подаче аппарату разгонного импульса характеристической скорости в апоцентре переходной орбиты. Этот способ является наиболее близким по совокупности существенных признаков и достигаемому результату к заявляемому изобретению и выбран в качестве прототипа.
Данный способ управления заключается в подлете КА в заданном коридоре входа в атмосферу планеты, обеспечении полета КА в атмосфере с заданными программами изменения значений аэродинамического качества, осуществлении аэродинамического торможения КА в атмосфере, вылете КА из атмосферы, определении скорости и угла наклона вектора скорости к местному горизонту при вылете КА из атмосферы, осуществлении подачи разгонного импульса характеристической скорости в апоцентре переходной орбиты.
Основным недостатком в реализации данного способа является необходимость создания системы управления аэродинамическим качеством и ее применения в процессе полета КА в атмосфере. Это, во-первых, также потребует дополнительных весовых затрат в ущерб установки на борт КА полезной нагрузки и, во-вторых, сопряжено с необходимостью автономного определения и непрерывного уточнения программы управления аэродинамическим качеством и ее отработки исполнительными органами КА в масштабе времени, близком к реальному. Причем, неправильные определение или несвоевременная отработка программ управления может не только снизить энергетическую эффективность управления КА, но и в ряде случаев привести к срыву программы полета.
Другим недостатком способа-прототипа является то, что при формировании орбит ИСП в области низких высот возникает необходимость осуществления полета КА в плотных слоях атмосферы. Это приводит к интенсивным воздействиям на аппарат температурных и перегрузочных режимов и к необходимости принятия мер по парированию их влияния, что также сопряжено с дополнительными весовыми затратами при проектировании космических аппаратов.
В связи с этим представляется перспективным разработка способа управления КА при его выведении на орбиту ИСП, обладающего достоинствами рассмотренных способов [1-3]. А именно, возможностью снижения скорости КА пассивным путем при его торможении в атмосфере в сочетании с использованием простых программ полета аппарата, не требующих создания и использования систем управления аэродинамическим качеством.
Суть заявляемого способа управления заключается в многократном прохождении верхних слоев атмосферы планеты, что обеспечивается достаточно пологим входом КА в атмосферу с заранее вычисленным значением прицельного угла наклона вектора скорости к местному горизонту θBX. Определение угла θBX должно удовлетворять следующим требованиям. Во-первых, при таком угле должен быть гарантированно достигнут минимально достаточный уровень торможения скорости, что обеспечивает переход КА с гиперболической орбиты на высокоэллиптическую. Во-вторых, при таком угле входа КА не должен подвергаться сильному воздействию перегрузок и температур. Предварительные расчеты показывают, что в зависимости от проектно-баллистических характеристик КА рациональные углы наклона вектора скорости при входе аппарата в атмосферу Марса θBX лежат в пределах -1,5°≥θΒΧ≥-3,5°, а при входе в атмосферу Юпитера -0,5°≥θBX≥-1,5°.
При таких углах входа КА, пройдя через верхние слои атмосферы планеты и несколько снизив скорость полета, вылетает из атмосферы и выходит на высокоэллиптическую орбиту с перицентром, находящимся несколько ниже условной границы атмосферы планеты и апоцентром, достигающим достаточно больших высот (в предельных случаях до нескольких десятков радиусов планеты).
Далее, пролетев оборот вокруг планеты, КА вторично входит в атмосферу с практически той же высотой перицентра. В результате повторного гашения скорости в атмосфере формируется следующая промежуточная орбита ИСП с высотой апоцентра ниже, чем предыдущая. Такая схема полета с многократным перехождением верхних слоев атмосферы осуществляется до тех пор, пока высота апоцентра переходной орбиты не снизиться до требуемой величины. После этого в апоцентре переходной орбиты осуществляется подача разгонного импульса характеристической скорости для формирования орбиты ИСП с заданными параметрами.
Реализация такого способа управления обеспечит снижение затрат характеристической скорости по сравнению с использованием способа-прототипа ~ на 15-20% и не потребует применения высокоточных средств управления КА в атмосфере.
Технический результат изобретения заключается в повышении эффективности совместного управления КА аэродинамическим торможением в атмосфере и работой двигательной установки на внеатмосферном участке, позволяющего снизить потребные затраты топлива на выведении аппарата на орбиту ИСП без применения высокоточных систем и алгоритмов управления аэродинамическим качеством в атмосфере.
Указанный технический результат достигается тем, что к известным существенным признакам способа-прототипа, заключающимся:
- в подлете космического аппарата в заданном коридоре входа в атмосферу планеты,
- осуществлении аэродинамического торможения космического аппарата атмосфере,
- вылете космического аппарата из атмосферы,
- определении скорости VK и угла наклона вектора скорости к местному горизонту θK при вылете космического аппарата из атмосферы,
- осуществлении подачи разгонного импульса характеристической скорости в апоцентре переходной орбиты, дополнительно
- на участке подлета к планете определяют прицельный угол наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу в соответствии с зависимостями



δV=VBX-Vπ,
rα=10R,
rπ=hp+R,
где θBX - угол наклона вектора скорости к местному горизонту при входе космического аппарата в атмосферу,
VBX - скорость движения космического аппарата при входе в атмосферу,
m - масса космического аппарата,
Cx - аэродинамический коэффициент лобового сопротивления,
S - площадь миделева сечения,
ρ0 - плотность атмосферы при входе космического аппарата в атмосферу,
β - логарифмический коэффициент изменения плотности атмосферы
по высоте,
ρp - плотность атмосферы в момент рикошета траектории движения космического аппарата,
hp - высота рикошета траектории движения космического аппарата,
g - ускорение свободного падения,
R - радиус планеты,
µ - произведение гравитационной постоянной на массу планеты,
V* - требуемая скорость движения космического аппарата в момент
рикошета траектории после аэродинамического торможения,
Vπ - скорость космического аппарата в момент достижения условного перицентра траектории движения,
Vα - скорость космического аппарата в апоцентре переходной орбиты,
rπ - радиус условного перицентра переходной орбиты космического аппарата,
rα - радиус апоцентра переходной орбиты космического аппарата,
- осуществляют вход космического аппарата в атмосферу с углом наклона вектора скорости к местному горизонту θΒΧ, скоростью VBX и полет в атмосфере с нулевым значением аэродинамического качества,
- после осуществления аэродинамического торможения и вылета космического аппарата из атмосферы определяют высоту апоцентра текущей переходной орбиты в соответствии с соотношениями
где hα - высота апоцентра переходной орбиты космического аппарата,
rK - радиус-вектор положения космического аппарата при его вылете из атмосферы,
VK - скорость космического аппарата при вылете из атмосферы,
µ - произведение гравитационной постоянной на массу планеты,
R - радиус планеты,
- сравнивают вычисленные значения высоты апоцентра текущей переходной орбиты hα со значениями заданной высоты апоцентра формируемой орбиты hαзад,
- при выполнении условия hα>hαзад+Δhα последовательно осуществляют пассивный полет космического аппарата по текущей переходной орбите, вход космического аппарата в атмосферу, аэродинамическое торможение и вылет космического аппарата из атмосферы, определяют высоту апоцентра новой орбиты hα, где Δhα - допустимое отклонение высоты апоцентра формируемой орбиты от заданной величины hαзад,
- при выполнении условий hα<hαзд+Δhα осуществляют подачу разгонного импульса характеристической скорости в апоцентре текущей переходной орбиты, где Δhα - допустимое отклонение высоты апоцентра формируемой орбиты от заданной величины hαзад.
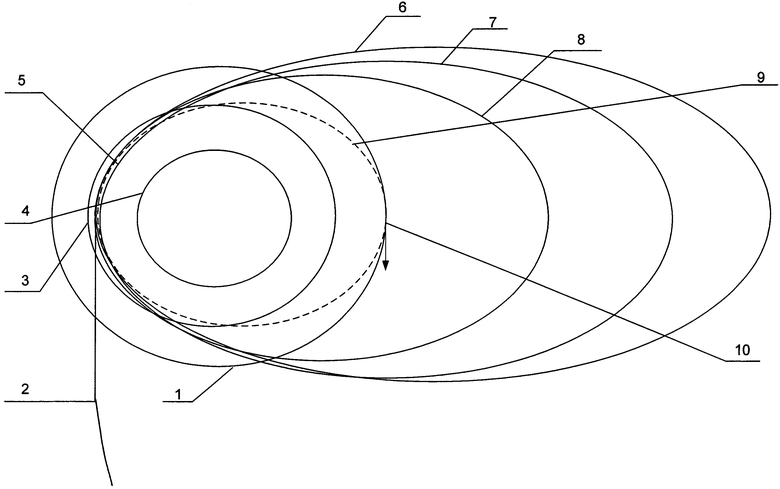
Заявленный способ управления космическим аппаратом при его выведении на орбиту искусственного спутника планеты поясняется фигурой 1, на которой приведена схема, характеризующая этапы полета КА при осуществлении многократных прохождений верхних слоев атмосферы и движения по переходным орбитам.
На фиг. 1 приняты следующие обозначения:
1 - формируемая орбита искусственного спутника планеты.
2 - подлетная гиперболическая траектория движения КА.
3 - условная граница атмосферы планеты.
4 - поверхность планеты.
5 - участки аэродинамического торможения КА в атмосфере.
6 - переходная орбита ИСП, сформированная после первого прохождения КА атмосферы планеты: выполняется условие hα>hαзад+Δhα.
7 - переходная орбита ИСП, сформированная после второго прохождения КА атмосферы планеты: выполняется условие hα>hαзад+Δhα.
8 - переходная орбита ИСП, сформированная после третьего прохождения КА атмосферы планеты: выполняется условие hα>hαзад+Δhα.
9 - переходная орбита ИСП, сформированная после многократного прохождения КА атмосферы планеты и выполнения условия hα>hαзад+Δhα.
10 - подача разгонного импульса характеристической скорости в апоцентре переходной орбиты.
Таким образом, предложенный способ управления обладает рядом преимуществ по сравнению с рассматриваемым прототипом. Реализация данного способа обеспечивает снижение потребных энергетических затрат при формировании орбиты ИСП за счет последовательного гашения скорости полета КА в процессе прохождений аппарата верхних слоев атмосферы планеты, т.е. происходит последовательное снижение высоты апоцентра переходной орбиты пассивным путем без расхода потребных энергозатрат. Кроме того, при осуществлении заявляемого способа отсутствует необходимость в использовании высокоточной системы управления аэродинамическим качеством при полете КА в атмосфере. Все это в совокупности позволяет оптимизировать массово-габаритный баланс КА и обеспечить увеличение массы его полезной нагрузки.
Покажем возможность осуществления изобретения, т.е. возможность его практического применения.
Как было указано выше, решение проблемы выведения КА на орбиты ИСП является определяющей для решения ряда исследовательских и научно-прикладных задач изучения планет Солнечной системы. От успешного решения проблемы формирования спутниковых орбит во многом зависят выполнение научных программ космических миссий дальнего космоса, что обуславливает актуальность и практическую значимость решения данной проблемы.
Что касается технических средств, обеспечивающих управление движением космического аппарата, то они применительно к заявляемому способу известны и изложены, в частности в работах [3].
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО ВЫВЕДЕНИИ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2014 |
|
RU2575556C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЫВЕДЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2012 |
|
RU2520629C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА АКТИВНОМ УЧАСТКЕ ЕГО ВЫВЕДЕНИЯ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2015 |
|
RU2596004C2 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537193C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОСАДКЕ В ЗАДАННУЮ ОБЛАСТЬ ПОВЕРХНОСТИ ПЛАНЕТЫ | 2014 |
|
RU2590775C2 |
| Способ ограничения засорения эксплуатируемых областей околоземного космического пространства | 2017 |
|
RU2665156C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С ДРУГИМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2020 |
|
RU2759360C1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537192C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ИСПОЛЬЗОВАНИЕМ АЭРОДИНАМИЧЕСКОГО КАЧЕСТВА ПРИ СПУСКЕ В АТМОСФЕРЕ | 2014 |
|
RU2552770C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2614466C2 |
Изобретение относится к управлению выведением космического аппарата (КА) с подлетной траектории на орбиту искусственного спутника планеты (ИСП) с атмосферой. В способе используются аэродинамическое торможение КА и реактивная коррекция орбиты КА на внеатмосферном участке. Пологий вход КА в атмосферу осуществляют с прицельным углом входа, вычисляемым из условия достижения требуемой скорости КА в результате его рикошета (по завершении аэродинамического торможения) от атмосферы на определенной высоте. Многократное прохождение КА верхних слоев атмосферы обеспечивает снижение апоцентра его орбиты до допустимой величины. В этом апоцентре отрабатывают импульс характеристической скорости для выхода КА на орбиту ИСП. Технический результат изобретения направлен на повышение эффективности управления КА аэродинамическими и реактивными средствами без применения высокоточных систем и алгоритмов управления аэродинамическим качеством в атмосфере. 1 ил.
Способ управления космическим аппаратом при его выведении на орбиту искусственного спутника планеты, заключающийся в подлете космического аппарата в заданном коридоре входа к атмосфере планеты, осуществлении аэродинамического торможения космического аппарата в атмосфере, вылете космического аппарата из атмосферы, определении скорости V
к и угла наклона вектора скорости к местному горизонту при вылете космического аппарата из атмосферы, осуществлении подачи разгонного импульса характеристической скорости в апоцентре переходной орбиты, отличающийся тем, что на участке подлета к планете определяют прицельный угол наклона вектора скорости космического аппарата к местному горизонту
при вылете космического аппарата из атмосферы, осуществлении подачи разгонного импульса характеристической скорости в апоцентре переходной орбиты, отличающийся тем, что на участке подлета к планете определяют прицельный угол наклона вектора скорости космического аппарата к местному горизонту  при его входе в атмосферу в соответствии с зависимостями:
при его входе в атмосферу в соответствии с зависимостями:


r

где
- угол наклона вектора скорости к местному горизонту при входе космического аппарата в атмосферу,
Vвх - скорость движения космического аппарата при входе в атмосферу,
m - масса космического аппарата,
Сх - аэродинамический коэффициент лобового сопротивления,
S - площадь миделева сечения,
ρ0 - плотность атмосферы при входе космического аппарата в атмосферу,
 - логарифмический коэффициент изменения плотности атмосферы по высоте,
- логарифмический коэффициент изменения плотности атмосферы по высоте,
ρp - плотность атмосферы в момент рикошета траектории движения космического аппарата,
hp - высота рикошета траектории движения космического аппарата,
g - ускорение свободного падения,
R - радиус планеты,
 - произведение гравитационной постоянной на массу планеты,
- произведение гравитационной постоянной на массу планеты,
V* - требуемая скорость движения космического аппарата в момент рикошета траектории после аэродинамического торможения,
V
V
r
r
осуществляют вход космического аппарата в атмосферу с углом наклона вектора скорости к местному горизонту
, скоростью Vвх и полет в атмосфере с нулевым значением аэродинамического качества, после осуществления аэродинамического торможения и вылета космического аппарата из атмосферы определяют высоту апоцентра текущей переходной орбиты в соответствии с соотношениями

где h
rк - радиус-вектор положения космического аппарата при его вылете из атмосферы,
Vк - скорость космического аппарата при вылете из атмосферы,
- произведение гравитационной постоянной на массу планеты,
R - радиус планеты,
- угол наклона вектора скорости к местному горизонту при входе космического аппарата в атмосферу,
сравнивают вычисленные значения высоты апоцентра h
h

где
последовательно осуществляют пассивный полет космического аппарата по текущей переходной орбите, вход космического аппарата в атмосферу, аэродинамическое торможение и вылет космического аппарата из атмосферы, определяют высоту апоцентра h
h
осуществляют подачу разгонного импульса характеристической скорости в апоцентре текущей переходной орбиты.
| СПОСОБ УПРАВЛЕНИЯ ВЫВЕДЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2012 |
|
RU2520629C1 |
| US 6550720 В2, 22.04.2003 | |||
| СПОСОБ ДОСТАВКИ ЭКИПАЖА С ПОВЕРХНОСТИ ЗЕМЛИ НА ОКОЛОЛУННУЮ ОРБИТУ И ВОЗВРАЩЕНИЯ С ОКОЛОЛУННОЙ ОРБИТЫ НА ПОВЕРХНОСТЬ ЗЕМЛИ | 2008 |
|
RU2376214C1 |
| RU 2005120143 A, 10.01.2007 | |||
| Привод высокоскоростного молота | 1975 |
|
SU524595A1 |
| ИВАНОВ Н.М., МАРТЫНОВ А.И | |||
| Движение космических летательных аппаратов в атмосферах планет" | |||
| М.: "Наука", 1985, стр.222-252. | |||

