Текст описания в факсимильном виде (см. графическую часть) Тщ
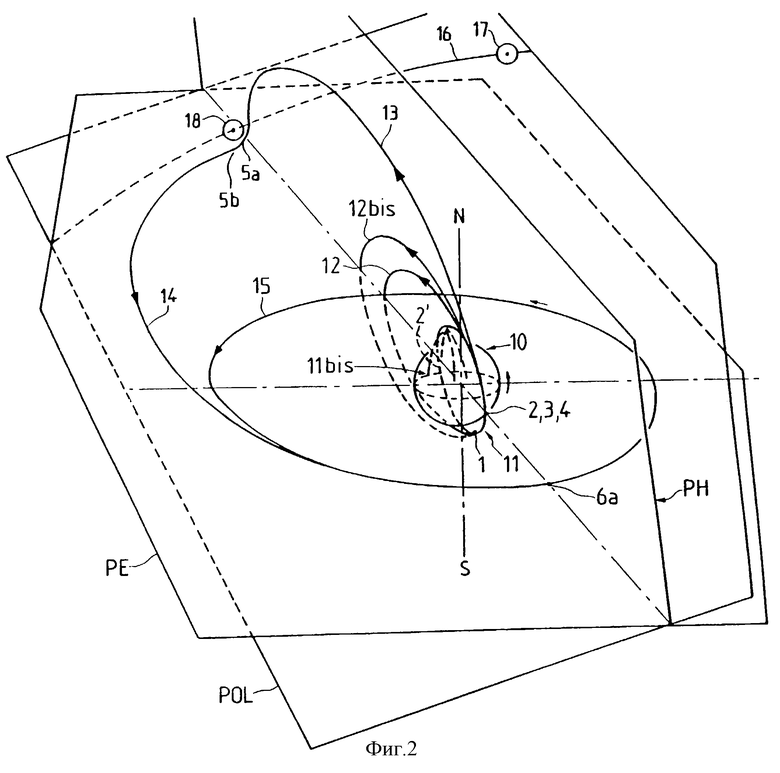
Изобретение относится к способам осуществления активно-гравитационных маневров искусственных спутников, одновременно выводимых на начальные орбиты одной ракетой-носителем. Предлагаемый способ состоит в выведении одного или нескольких вторых спутников на их конечные орбиты после отделения от ракеты-носителя первого спутника. Это выведение включает в себя первый орбитальный маневр перевода спутника на высокоэллиптическую орбиту с апогеем 50000-400000 км. Большая полуось данной орбиты перекрывает тороидальное пространство, образованное движением сферы гравитационного влияния Луны по ее орбите. Второй орбитальный маневр состоит в переводе спутника в перигее указанной орбиты на сфазированную переходную лунную орбиту ожидания. Третий маневр включает коррекцию параметров входа спутника в сферу гравитационного влияния Луны. Четвертый маневр включает изменение высоты перигея и наклонения промежуточной орбиты второго спутника вследствие гравитационного облета Луны, а пятый маневр завершает перевод второго спутника на его конечную орбиту. Орбита, на которую выводят указанный первый спутник, при его отделении от ракеты-носителя может быть низкой гелиосинхронной орбитой или орбитой перехода к геостационарной (супергеостационарной) орбите с малым наклонением. Конечные орбиты вторых спутников могут являться низкими круговыми орбитами различных наклонений. Для выполнения орбитальных маневров и ориентации используют химические и/или электроракетные двигатели на спутниках, а также маховики (гироскопы). Изобретение направлено на повышение экономичности группового запуска спутников на некомпланарные орбиты. 10 з.п.ф-лы, 1 табл., 7 ил.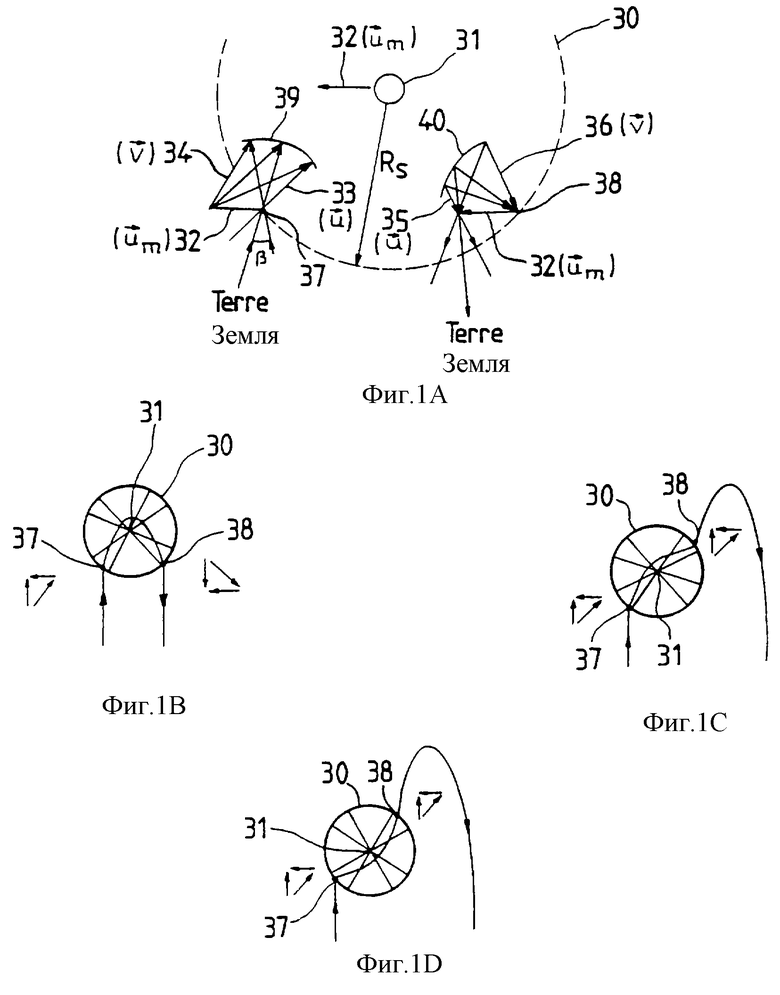
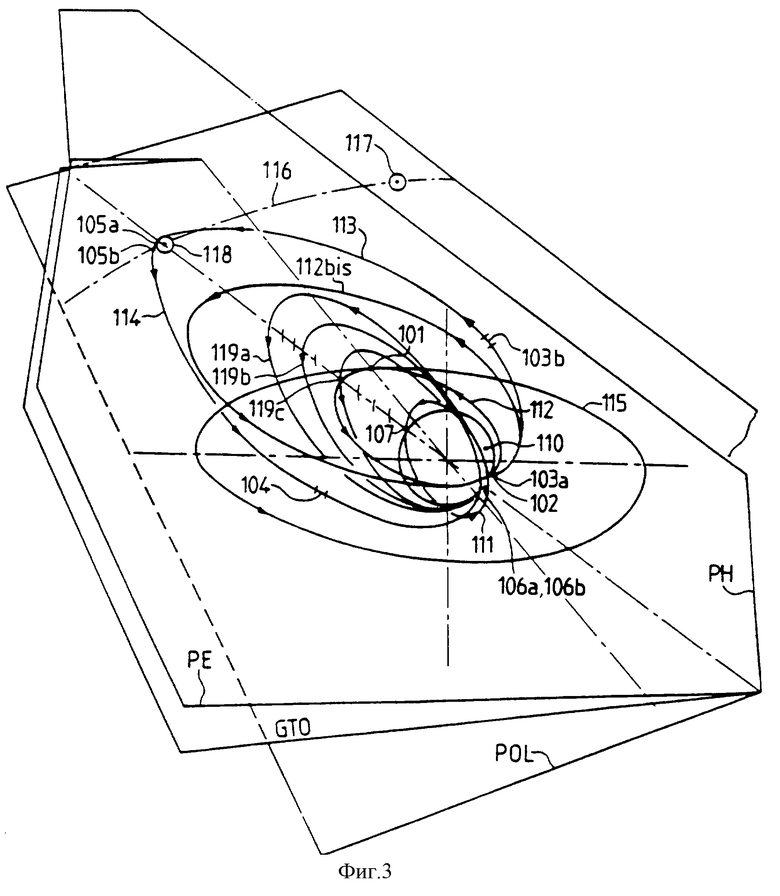
1. Способ одновременного выведения нескольких спутников на некомпланарные орбиты, заключающийся в том, что первый спутник (В) устанавливают на ракету-носитель, предназначенную для непосредственного выведения первого спутника (В) на первую конечную орбиту, характеризуемую первыми орбитальными параметрами: первой величиной эксцентриситета, первой величиной наклонения и первой высотой апогея, устанавливают на эту же ракету-носитель по меньшей мере один второй спутник (А), предназначенный для выведения на вторую конечную орбиту, характеризуемую вторыми орбитальными параметрами: второй величиной эксцентриситета, второй величиной наклонения и второй высотой апогея, значения которых существенно отличаются от соответствующих значений первых орбитальных параметров, обеспечиваемых ракетой-носителем и предназначенных для первого спутника (В), выводимого одновременно со вторым спутником (А) на указанную первую конечную орбиту или орбиту свободного дрейфа к ней, отличающийся тем, что выведение на конечную орбиту второго спутника (А) осуществляют в процессе выполнения орбитальных маневров, первый из которых включает переход второго спутника (А) на сильно вытянутую эллиптическую орбиту ожидания, апогей которой имеет высоту от 50000 до 400000 км, а большая полуось ориентирована таким образом, чтобы перекрыть тороидальное пространство, образованное движением сферы гравитационного влияния Луны по ее орбите, второй орбитальный маневр включает перевод второго спутника в перигее указанной сильно вытянутой орбиты ожидания на переходную лунную орбиту, причем период обращения (ТA) спутника по орбите ожидания определяется выражением
nTA+0,5·TLTO=tp1,
где tLTO - период обращения по лунной переходной орбите;
tp1 - время между окончанием участка выведения и приходом Луны в намеченную точку;
n - целое число, не превышающее 4 и обозначающее количество оборотов второго спутника по указанной орбите ожидания,
третий орбитальный маневр включает коррекцию, проводимую на активном участке выведения второго спутника на указанную лунную переходную орбиту и обеспечивающую точные параметры его входа в сферу гравитационного влияния Луны для осуществления ее гравитационного облета, четвертый орбитальный маневр включает изменение высоты перигея и наклонения промежуточной орбиты сближения второго спутника (А) со своей второй конечной орбитой вследствие гравитационного облета Луны в сфере ее гравитационного влияния и пятый орбитальный маневр включает точный перевод второго спутника на его вторую конечную орбиту.
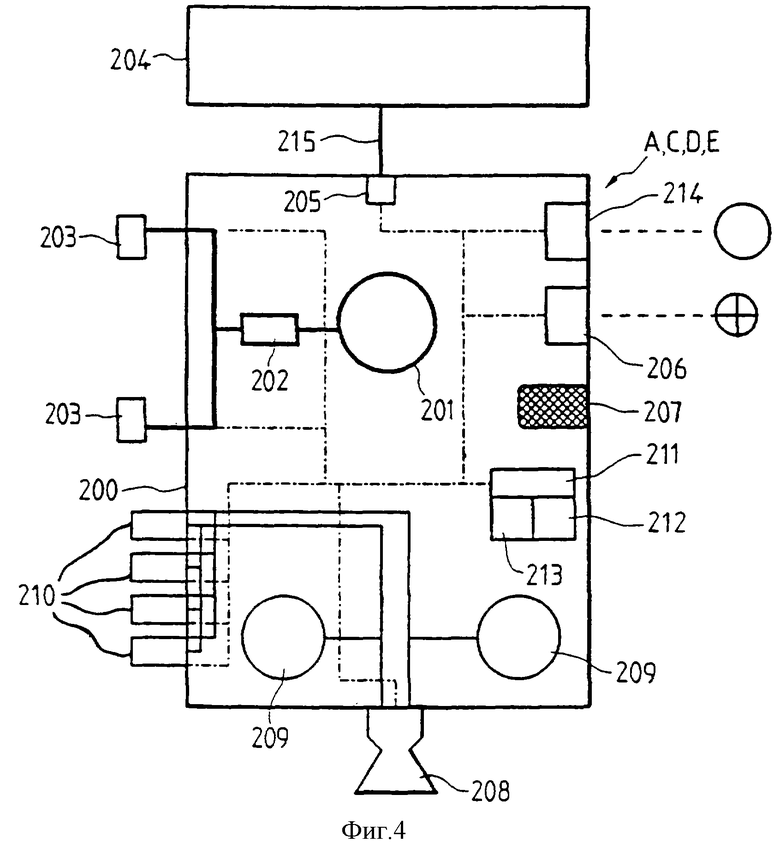
2. Способ по п.1, отличающийся тем, что первая конечная орбита, на которую выводят первый спутник (В), является низкой наклонной гелиосинхронной орбитой, при этом пятый орбитальный маневр выполняют в перигее промежуточной орбиты второго спутника (А), сформированной на выходе из сферы гравитационного влияния Луны, снижая высоту апогея этой промежуточной орбиты или придавая ей круговую форму для преобразования данной орбиты в указанную вторую конечную орбиту, представляющую собой геостационарную орбиту.3. Способ по п.1, отличающийся тем, что первая конечная орбита, на которую выводят первый спутник (В), является слабонаклонной орбитой перехода к геостационарной или супергеостационарной орбитам, при этом в ходе выполнения третьего орбитального маневра корректирующий импульс на указанном активном участке выбирают таким, чтобы параметры входа в сферу гравитационного влияния Луны обеспечивали по завершении гравитационного облета Луны и выходе из сферы ее гравитационного влияния высоту перигея указанной промежуточной орбиты второго спутника (А) от 80 до 170 км, а в пятом орбитальном маневре осуществляют при фиксированной высоте перигея промежуточной орбиты второго спутника (А), сформированной на выходе из сферы гравитационного влияния Луны, по меньшей мере одно атмосферное торможение для уменьшения высоты апогея этой промежуточной орбиты, после чего посредством орбитального маневра в апогее данной орбиты увеличивают высоту ее перигея, чтобы преобразовать данную промежуточную орбиту в указанную вторую конечную орбиту, представляющую собой низкую наклонную орбиту или низкую круговую наклонную орбиту.4. Способ по п.3, отличающийся тем, что при одновременном выведении нескольких вторых спутников (А, С, D, Е) на конечные орбиты, представляющие собой низкие круговые орбиты с различными наклонениями, первый спутник (В) выводят на первую конечную орбиту, представляющую собой слабонаклонную переходную к геостационарной или супергеостационарной орбиту, а третий орбитальный маневр осуществляют путем выполнения серии коррекций на указанном активном участке выведения вторых спутников так, чтобы вывести различные вторые спутники в различные точки входа в сферу гравитационного влияния Луны и получить тем самым в результате атмосферного торможения в ходе пятого орбитального маневра различные наклонения указанных конечных орбит вторых спутников (А, С, D, Е).5. Способ по п.1, отличающийся тем, что второй спутник (А, С, D, E) оборудуют бортовым компьютером и системой создания тяги на химическом топливе, содержащей установленный на борту главный ракетный двигатель, а также ракетные двигатели управления пространственной ориентацией этого спутника.6. Способ по п.1, отличающийся тем, что второй спутник (А, С, D, Е) оборудуют бортовым компьютером и электрической системой создания тяги, содержащей электрические ракетные двигатели с высоким удельным импульсом, которые устанавливают на борту второго спутника и выбирают из числа ионных, электродуговых или с замкнутым дрейфом электронов двигателей.7. Способ по п.5, отличающийся тем, что второй спутник (А, С, D, Е) оборудуют датчиком ориентации на небесное светило, датчиком ориентации на Землю с изменяемым полем обзора, а также снабжают таблицей эфемерид, которую закладывают в указанный бортовой компьютер и которая дает возможность рассчитывать углы между вектором тяги и направлениями на Землю и на Солнце, обеспечивая определение пространственного положения второго спутника (А, С, D, Е) при орбитальных маневрах.8. Способ по п.7, отличающийся тем, что второй спутник (А, С, D, E) дополнительно оборудуют гироскопическими датчиками для контроля двигателей управления пространственным положением, которыми производят вращение корпуса второго спутника для ориентации указанного главного двигателя в заданном направлении.9. Способ по любому из пп.5-8, отличающийся тем, что на корпусе второго спутника (А, С, D, E) устанавливают по меньшей мере два лазерных уголковых отражателя для получения посредством лазерной телеметрии точной информации о фактическом положении второго спутника перед выполнением коррекции на участке траектории при третьем орбитальном маневре.10. Способ по п.6, отличающийся тем, что второй спутник (А, С, D, Е) оборудуют датчиком земного горизонта с изменяемым полем обзора для получения информации о положении Земли, при этом пространственную ориентацию этого спутника осуществляют с помощью инерционных маховиков, а в бортовом компьютере используют закон управления электрическими ракетными двигателями, заключающийся в стабилизации вектора тяги в направлении, перпендикулярном направлению Земля - спутник.11. Способ по п.6, отличающийся тем, что второй спутник (А, С, D, Е) оборудуют датчиком ориентации на небесное светило, а также снабжают таблицей эфемерид, которую закладывают в указанный бортовой компьютер для определения пространственного положения этого спутника, причем положением спутника управляют с помощью реактивных маховиков, а электрическими ракетными двигателями управляют с помощью бортового компьютера по закону, заключающемуся в нацеливании вектора тяги двигателей вдоль инерциального направления.