Настоящее изобретение относится к подшипниковому узлу для установки исполнительного устройства на крыло воздушного летательного аппарата и к узлу исполнительной системы, содержащему подшипниковый узел согласно настоящему изобретению и исполнительные устройства.
Уровень техники
Воздушный летательный аппарат должен создавать изменяющиеся уровни аэродинамической подъемной силы во время взлета, посадки и полета на крейсерской скорости. Для управления коэффициентом подъемной силы крыла используют совокупность поверхностей управления на передней и задней кромке крыла. Поверхность управления на передней кромке известна как предкрылок, а поверхность управления на задней кромке известна как закрылок. Во время нормального полета предкрылки и закрылки убирают к передней и задней кромкам крыла соответственно. Однако во время взлета и посадки их разворачивают от крыла, для того чтобы изменять воздушный поток по поверхностям крыла и под ними. Посредством изменения степени разворота предкрылков и закрылков от крыла можно управлять аэродинамической подъемной силой, обеспечиваемой крылом. Другие поверхности управления на задней кромке включают в себя элероны и интерцепторы.
Поверхности управления перемещают при помощи гидравлических исполнительных устройств, установленных в структуре крыла и соединенных в каждом конце с крылом и с поверхностью управления посредством узлов сферических подшипников с обоих концов исполнительного устройства.
Поскольку возрастают требования к более тонким, более эффективным профилям крыла, становится все труднее устанавливать необходимые системы, структурные и приводные (исполнительные) устройства в пределах внешнего контура крыла, и размеры исполнительного устройства, которое может быть использовано для управления разворачиванием различных поверхностей управления, жестко ограничены. В частности, проблемой является длина обычных гидравлических цилиндров, в особенности поскольку каждый сферический подшипник в каждом конце исполнительного устройства увеличивает длину исполнительного устройства на 50-200 мм, что часто неприемлемо вследствие жестких пространственных ограничений в структуре крыла.
Известно, что для решения вышеупомянутых проблем используют цилиндры на цапфах, поскольку они более короткие по длине. Однако поскольку данные исполнительные устройства опираются только на один сферический подшипник на подвижном конце гидравлического цилиндра, неподвижный конец исполнительного устройства выполнен с возможностью перемещения вокруг одной оси, и поэтому они страдают от высокого износа на цилиндрических втулках и уплотнениях, который приводит к преждевременному отказу вследствие гиперстатической нагрузки, обусловленной сгибанием крыла и производственными допусками. Поэтому для предотвращения потенциального отказа необходим регулярный контроль и техническое обслуживание.
Следовательно, необходимо создать узел, в котором исполнительное устройство установлено посредством сферического подшипника с обоих концов, которое, тем не менее, не создает дополнительной длины, как обычные подшипниковые узлы. Таким образом, варианты осуществления настоящего изобретения стремятся обеспечить исполнительное устройство, которое по существу устраняет или уменьшает известные проблемы, связанные с обычными подшипниковыми узлами, и создать исполнительное устройство с уменьшенной длиной, которое способно выдерживать гиперстатические нагрузки, обусловленные сгибанием крыла.
Краткая сущность изобретения
В соответствии с изобретением создан подшипниковый узел для установки пары разнесенных параллельных исполнительных устройств между крылом и поверхностью управления воздушного летательного аппарата таким образом, что исполнительные устройства совместно управляют разворачиванием упомянутой поверхности управления от крыла, при этом данный подшипниковый узел содержит неподвижный элемент для прикрепления к воздушному летательному аппарату и подвижный элемент, выполненный с возможностью прикрепления к исполнительным устройствам, причем неподвижный и подвижный элементы соединены посредством частично сферического подшипника и выполнены так, что частично сферический подшипник расположен в пространстве между исполнительными устройствами.
Каждое исполнительное устройство может содержать гидравлический цилиндр и поршень, расположенный с возможностью перемещения в цилиндре. Подшипниковый узел предпочтительно содержит первый подвижный опорный элемент, выполненный с возможностью прикрепления к гидравлическим цилиндрам для соединения каждого исполнительного устройства параллельно, на расстоянии друг от друга, причем упомянутый первый подвижный опорный элемент включает ось, которая проходит через пространство между цилиндрами, и частично сферический подшипник, выполненный с возможностью установки на упомянутой оси.
В предпочтительном варианте осуществления первый неподвижный опорный элемент содержит консоль, которая проходит в пространство между цилиндрами, причем упомянутая консоль содержит отверстие, которое образует гнездо подшипника для приема первого частично сферического подшипника, установленного на оси первого подвижного опорного элемента так, что неподвижный и подвижный опорные элементы способны вращаться относительно друг друга вокруг первого частично сферического подшипника.
Консоль первого неподвижного опорного элемента может быть выполнена из двух разделяемых частей, которые соединяются, образуя гнездо подшипника и охватывая первый частично сферический подшипник.
В одном варианте осуществления первый неподвижный опорный элемент содержит фланец на одном конце, удаленном от гнезда подшипника, причем упомянутый фланец содержит средство для обеспечения прикрепления консоли к воздушному летательному аппарату.
Предпочтительно первый подвижный опорный элемент содержит кольцо на каждом конце оси для приема цилиндра каждого исполнительного устройства в соответствующих кольцах.
С каждым концом может быть соединена усиливающая пластина, расположенная между каждым кольцом.
В предпочтительном варианте осуществления второй подвижный опорный элемент выполнен с возможностью прикрепления к свободному концу каждого поршня, выдвигающегося из соответствующих им цилиндров так, что поршни перемещаются синхронно в соответствующие им цилиндры из них.
Второй подвижный опорный элемент может содержать центральный участок, который продолжается между поршнями и отверстием, проходящим через упомянутый центральный участок, с возможностью приема и установки второго частично сферического подшипника между упомянутыми поршнями.
Центральный участок предпочтительно содержит отверстие в центральном участке для приема и установки оси, проходящей вбок через данное отверстие, причем второй частично сферический подшипник выполнен с возможностью установки на упомянутой оси.
В предпочтительном варианте осуществления второй неподвижный опорный элемент содержит консоль, выполненную с возможностью прохождения в отверстие в центральном участке второго подвижного опорного элемента, причем данная консоль содержит отверстие, которое образует гнездо подшипника для приема второго частично сферического подшипника, установленного в упомянутом отверстии во втором подвижном опорном элементе так, что вторые неподвижный и подвижный опорные элементы вращаются относительно друг друга вокруг второго частично сферического подшипника.
Консоль второго неподвижного опорного элемента может быть выполнена из двух разделяемых частей, которые соединяются, образуя гнездо подшипника и охватывая второй частично сферический подшипник.
Предпочтительно второй неподвижный опорный элемент содержит фланец на одном конце, удаленном от гнезда подшипника, причем упомянутый фланец содержит средство для обеспечения прикрепления консоли к воздушному летательному аппарату.
В предпочтительном варианте осуществления подшипниковый узел содержит трубопровод для подсоединения по текучей среде одного источника текучей среды к обоим цилиндрам. Предпочтительно отдельный трубопровод выполнен с возможностью установки на каждом конце пары цилиндров.
Концы каждого цилиндра могут быть закрыты пластиной, и трубопровод выполнен с возможностью прикрепления к пластинам на одном конце пары цилиндров так, чтобы проходить между ними, причем каждая пластина содержит канал, проходящий через нее, для соединения по текучей среде трубопровода с цилиндрами.
В соответствии с другим аспектом изобретения создана исполнительная система, содержащая подшипниковый узел согласно настоящему изобретению, причем исполнительная система содержит пару разнесенных параллельных цилиндров, каждый из которых содержит поршень, расположенный в нем с возможностью перемещения, первый подвижный опорный элемент, прикрепленный к упомянутым цилиндрам и содержащий первый частично сферический подшипник, установленный на оси, проходящей между ними, первый неподвижный опорный элемент, соединенный с упомянутым первым частично сферическим подшипником так, что первые неподвижный и подвижный опорные элементы способны вращаться относительно друг друга вокруг упомянутого первого частично сферического подшипника.
В предпочтительном варианте осуществления к свободному концу каждого поршня прикреплен второй подвижный опорный элемент, причем в отверстии в центральном участке упомянутого второго подвижного опорного элемента установлен второй частично сферический подшипник, при этом второй неподвижный опорный элемент проходит в упомянутое отверстие и соединен со вторым частично сферическим подшипником так, что вторые неподвижный и подвижный опорные элементы способны вращаться относительно друг друга вокруг второго частично сферического подшипника.
В одном варианте осуществления в каждом цилиндре расположена пружина для смещения поршней в нейтральное положение при отсутствии гидравлического давления, действующего на поршни.
В одном варианте осуществления первый неподвижный опорный элемент выполнен с возможностью прикрепления к крылу воздушного летательного аппарата, а второй неподвижный опорный элемент выполнен с возможностью прикрепления к поверхности управления.
В другом варианте осуществления первый неподвижный опорный элемент выполнен с возможностью прикрепления к поверхности управления, а второй неподвижный опорный элемент выполнен с возможностью прикрепления к крылу воздушного летательного аппарата.
В соответствии с другим аспектом изобретения создано крыло воздушного летательного аппарата и поверхность управления, соединенная с упомянутым крылом, для разворачивания во время взлета и/или посадки, и исполнительная система в соответствии с изобретением, расположенная между поверхностью управления и крылом и соединенная с ними, для управления разворачиванием упомянутой поверхности управления от упомянутого крыла.
Краткое описание чертежей
Ниже будут описаны варианты осуществления изобретения, только в качестве примера и со ссылкой на прилагаемые чертежи, на которых:
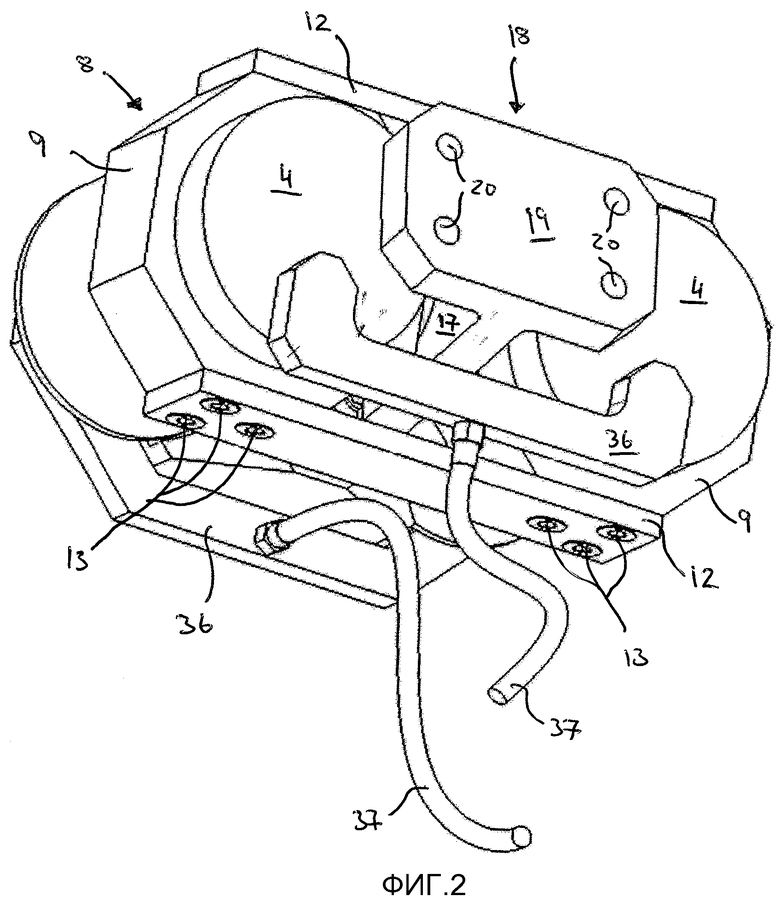
Фиг.1 представляет собой перспективный вид спереди узла исполнительной системы в соответствии с изобретением, включающего подшипниковый узел настоящего изобретения, с поршнями гидравлических цилиндров, показанными во втянутом положении;
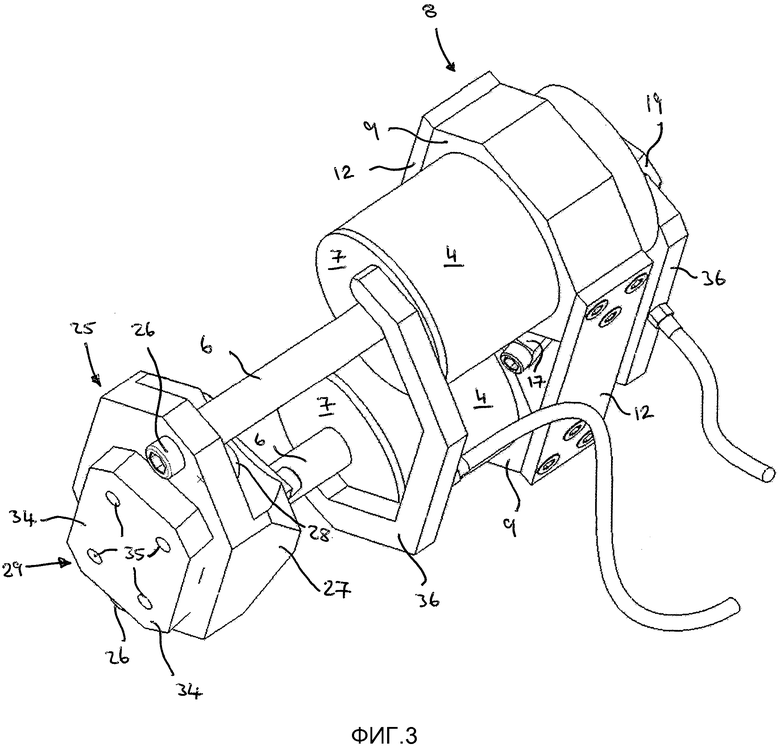
Фиг.2 представляет собой перспективный вид сзади исполнительной системы, показанной на фиг.1;
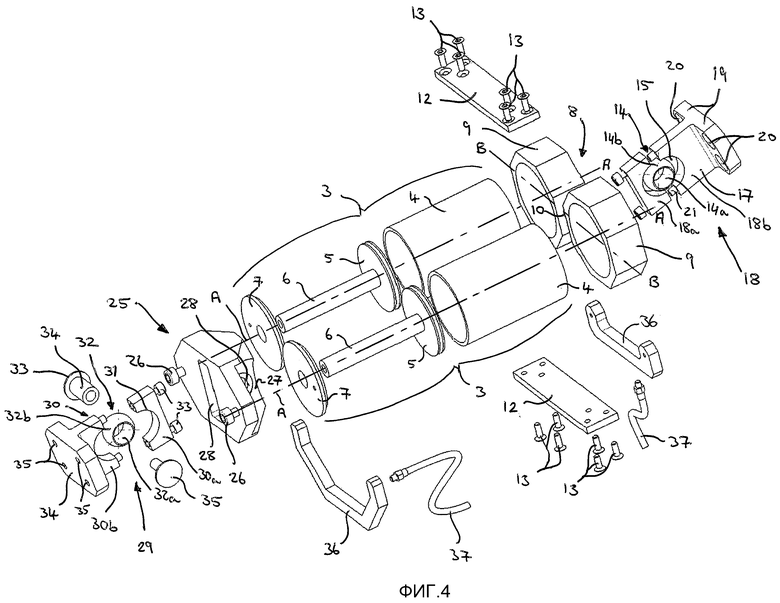
Фиг.3 представляет собой перспективный вид спереди исполнительной системы, показанной на фиг.1, но с поршнями гидравлических цилиндров, показанными в их выдвинутом положении; и
Фиг.4 представляет собой перспективный вид с пространственным разделением элементов исполнительной системы, показанной на фиг.1-3.
Описание предпочтительных вариантов осуществления
Ссылаясь ниже на чертежи, на фиг.1 и 2 показан узел 1 исполнительной системы, включающий в себя подшипниковый узел в соответствии с предпочтительным вариантом осуществления изобретения. Узел 1 исполнительной системы содержит пару разнесенных гидравлических цилиндров 3, продольные оси (А-А на фиг.4) которых расположены параллельно друг другу. Каждый цилиндр 3 содержит цилиндрический корпус 4 с поршнем 5 (см. фиг.4), расположенным с возможностью перемещения в цилиндрическом корпусе 4, для приведения в движение поверхности управления (не показанной) к крылу и от крыла воздушного летательного аппарата (не показанного), когда поршень 5 перемещается в цилиндрический корпус 4 и из него в ответ на изменения в гидравлическом давлении на одну сторону поршня 5. Каждый поршень 5 содержит шток 6, который проходит через пластину 7, закрывающую конец каждого цилиндрического корпуса 4.
Что касается подшипникового узла, то он содержит первый подвижный опорный элемент 8, содержащий пару колец 9, разнесенных друг от друга посредством оси 10, которую можно видеть только на фиг.4 между кольцами 9. Кольца 9 выполнены с возможностью приема и закрепления корпусов 4 гидравлических цилиндров рядом с одним концом, причем их продольные оси (А-А на фиг.4) параллельны друг другу. Продольная ось оси 10 (В-В на фиг.4) пересекает и проходит перпендикулярно продольной оси А-А каждого цилиндрического корпуса 4. Кольца 9 и ось 10 все жестко соединены вместе и/или выполнены за одно целое без возможности относительного перемещения между ними. Таким образом, посредством колец 9 цилиндры 4 удерживаются в фиксированных относительных положениях. Для дополнительного усиления и поддержания относительных положений цилиндров 4 две пластины 12 расположены между и непосредственно соединены с кольцами 9 посредством винтов 13 в каждом конце.
Первый частично сферический подшипник 14 содержит внутреннее и наружное кольца 14а, 14b. Внутреннее кольцо 14а расположено на оси 10, а наружное кольцо 14b расположено в отверстии 15, образованном в консоли 17 первого неподвижного опорного элемента 18, который содержит фланец 19 с отверстиями 20 для прикрепления первого неподвижного опорного элемента 18 к конструктивной детали крыла воздушного летательного аппарата при помощи болтов, вставленных через упомянутые отверстия 20. Таким образом, первые подвижный и неподвижный опорные элементы 8, 18 соединены так, что они способны вращаться относительно друг друга вокруг первого частично сферического подшипника 14.
Необходимо отметить, что первый неподвижный опорный элемент 18 может быть образован из двух частей 18а, 18b, которые прикреплены друг к другу и совместно образуют отверстие 15, которое содержит в себе первый частично сферический подшипник 14. Две части 18а, 18b могут быть соединены при помощи болтов 21а, которые расположены в пустотелых штифтах 21 в консоли 17 для точного совмещения между двумя частями 18а, 18b. Болты проходят через штифты 21 в консоль 17 с резьбой, обеспечивая просто зажимающее усилие. Необходимо понимать, что первый сферический подшипник 14 расположен между цилиндрами 4 и поэтому не способствует увеличению общей длины узла 1.
Возможно, только один конец узла 1 содержит узел сферического подшипника согласно настоящему изобретению, который не влияет на общую длину узла в такой же степени, как обычный узел. Однако в предпочтительном варианте осуществления оба конца системы содержат подшипниковый узел согласно настоящему изобретению, в котором частично сферический подшипник установлен и размещен между цилиндрами 4, для того чтобы обеспечить максимальное уменьшение общей длины узла. В этом случае подшипниковый узел дополнительно включает в себя второй подвижный опорный элемент 25, который прикреплен к концам обоих поршней 6 при помощи, например, болтов 26. Таким образом, поршни 5 ограничены так, что они перемещаются синхронно в соответствующие им цилиндры 4 и из них.
Второй подвижный опорный элемент 25 содержит центральный участок 27, который проходит внутрь к цилиндрам 4 между штоками 6 поршней. Преимущественно прямоугольное отверстие 28 проходит через центральный участок 27 в том же направлении, что и продольная ось А-А цилиндров 3. Через центральный участок 27 в сторону, под прямыми углами к продольной оси А-А, также проходит отверстие 28, пересекающееся с отверстием 28.
Второй неподвижный опорный элемент 29 содержит консоль 30 с отверстием 31, в котором размещается второй частично сферический подшипник 32, содержащий внутреннее и наружное кольца 32а, 32b подшипника. Консоль 30 может быть выполнена из двух частей 30а, 30b, которые соединяются вместе, образуя отверстие 31 и охватывая второй частично сферический подшипник 32. Две части консоли 30 могут быть соединены вместе при помощи болтов 33, которые расположены в пустотелых штифтах 33а в части 30b для точного совмещения между двумя частями 30а, 30b. Болты 33 проходят через штифты 33а в часть 30b с резьбой, обеспечивая просто зажимающее усилие.
После того как второй частично сферический подшипник 32 размещен в консоли 30 с наружным кольцом 32b подшипника, расположенным в отверстии 31, консоль 30 вводят через прямоугольное отверстие 28 в центральном участке 27 второго подвижного опорного элемента 25 так, что второй частично сферический подшипник 32 размещается в отверстии 28 в центральном участке 34 и совмещается с отверстиями 28. Затем шпильку 33b, содержащую полую ось 34 с внутренней резьбой, вставляют через отверстия 28 и второй частично сферический подшипник 32 и фиксируют на месте посредством заглушки 35, содержащей ось 35а с наружной резьбой. Внутренняя резьба на оси 34 входит в зацепление с наружной резьбой на оси 35а. Два элемента действуют совместно как один, но, предположительно, выходят из строя в отдельности и поэтому действуют как отказоустойчивая штифтовая конструкция. Таким образом, внутреннее кольцо 32а устанавливают на оси 34, а второй частично сферический подшипник 32 устанавливают на место в отверстии 28 центрального участка 27 между концами поршневых штоков 6. В результате вторые подвижный и неподвижный опорные элементы 25, 29 соединяются посредством второго частично сферического подшипника 32 так, что они способны вращаться относительно друг друга вокруг второго частично сферического подшипника 32. Необходимо понимать, что консоль 30 расположена в прямоугольном отверстии 28 в относительно свободной посадке, так что имеется достаточный зазор для обеспечения относительного вращения между вторыми подвижным и неподвижным опорными элементами 25, 29 в пределах ограниченного углового диапазона перемещения.
Второй неподвижный опорный элемент 29 содержит фланец 34 в свободном конце консоли 30, удаленном от отверстия 28, который принимает второй частично сферический подшипник 32, обеспечивая прикрепление второго неподвижного опорного элемента 29 к поверхности управления воздушного летательного аппарата при помощи болтов, которые проходят через отверстия 35 во фланце 34.
Цилиндры 3 выполнены так, что они работают совместно, и так, что поршень 5, связанный с каждым цилиндрическим корпусом 4, перемещается точно на одну и ту же величину. Жесткое соединение двух цилиндров 4 гарантирует, что любая асимметрия исключена или уменьшена. При этом также предполагается, что могут быть использованы передний и задний балансирные трубопроводы, чтобы гарантировать, что цилиндры 4 не будут сталкиваться друг с другом и будет обеспечено выравнивание давления. Использование балансирного трубопровода может также обеспечить более быстрое время реакции исполнительных устройств.
Со ссылкой на чертежи, трубопровод 36 прикреплен к каждому концу цилиндрического корпуса 4. Каждый трубопровод 36 содержит канал для перемещения через него текучей среды, чтобы соединить оба цилиндрических корпуса 4 с одной трубой 37 для подачи текучей среды, прикрепленной к каждому трубопроводу 36. Это гарантирует, что совершенно одинаковое количество текучей среды закачивается в каждый цилиндрический корпус 4 и из него. Перемещение поршней 5 можно контролировать при помощи линейного преобразователя скорости перемещения (linear velocity displacement transducer - LVDT). Если использовать два LVDT, то обратная связь по положению каждого поршня может быть обеспечена посредством устройства сравнения. Устройство сравнения может быть выполнено с возможностью приведения в действие отсечного клапана в случае любой асимметрии между цилиндрами 3. Как вариант, LVDT могут информировать сдвоенную конструкцию сервоклапана так, что коррекции осуществляются на непрерывной основе.
В одном непроиллюстрированном модифицированном варианте осуществления в каждом цилиндрическом корпусе 4 может быть размещена пружина для смещения поршней 5 в нейтральное положение в случае отсутствия гидравлического давления, действующего на поршни 5.
Необходимо понимать, что в данном случае по меньшей мере один сферический подшипник 14, 32 не выступает из одного конца узла, а расположен между парой цилиндров 3. Следовательно, уменьшена общая длина исполнительной системы 1, обеспечивая большую гибкость при выборе конструктивных решений. Хотя в результате использования цилиндров 3 в параллельном соединении увеличилась ширина исполнительного устройства 1, пространство в направлении поперек крыла вызывает меньшую озабоченность, и поэтому это считается допустимым компромиссом при использовании двух цилиндров 3, которые более удобно размещаются в крыле.
Выше была сделана ссылка на подвижные и неподвижные опорные элементы. Подвижными опорными элементами являются такие элементы, которые соединены с и перемещаются совместно с цилиндрами 3, а неподвижными опорными элементами являются такие элементы, которые соединены с конструкцией воздушного летательного аппарата или с поверхностью управления.
Необходимо понимать, что вышеприведенное описание дано только в качестве примера и что модификации могут быть выполнены в опорном узле настоящего изобретения без отхода от объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2004 |
|
RU2363621C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ЧЕРЁМУШКИНА О.В. | 2008 |
|
RU2396185C1 |
| УСТРОЙСТВО ГЕРМЕТИЗАЦИИ ЗАЗОРА МЕЖДУ ЗАКРЫЛКАМИ | 2007 |
|
RU2375251C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| БПЛА и способ управления БПЛА | 2024 |
|
RU2831546C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Атмосферный компрессорно-реактивный летательный аппарат | 2016 |
|
RU2617863C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ "ШОТА" СО СПЕЦИАЛЬНЫМ ВИНТОМ | 1990 |
|
RU2022875C1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
Изобретение относится к области авиации, более конкретно к подшипниковому узлу для установки пары разнесенных параллельных исполнительных устройств между крылом и поверхностью управления воздушного летательного аппарата так, что исполнительные устройства совместно управляют разворачиванием упомянутой поверхности управления из крыла. Подшипниковый узел содержит неподвижный элемент для прикрепления к воздушному летательному аппарату и подвижный элемент, выполненный с возможностью прикрепления к исполнительным устройствам. Неподвижный и подвижный элементы соединены посредством частично сферического подшипника и выполнены так, что частично сферический подшипник расположен в пространстве между исполнительными устройствами. Технический результат заключается в уменьшении размеров исполнительной системы управления управляющими поверхностями крыла. 14 з.п. ф-лы, 4 ил. 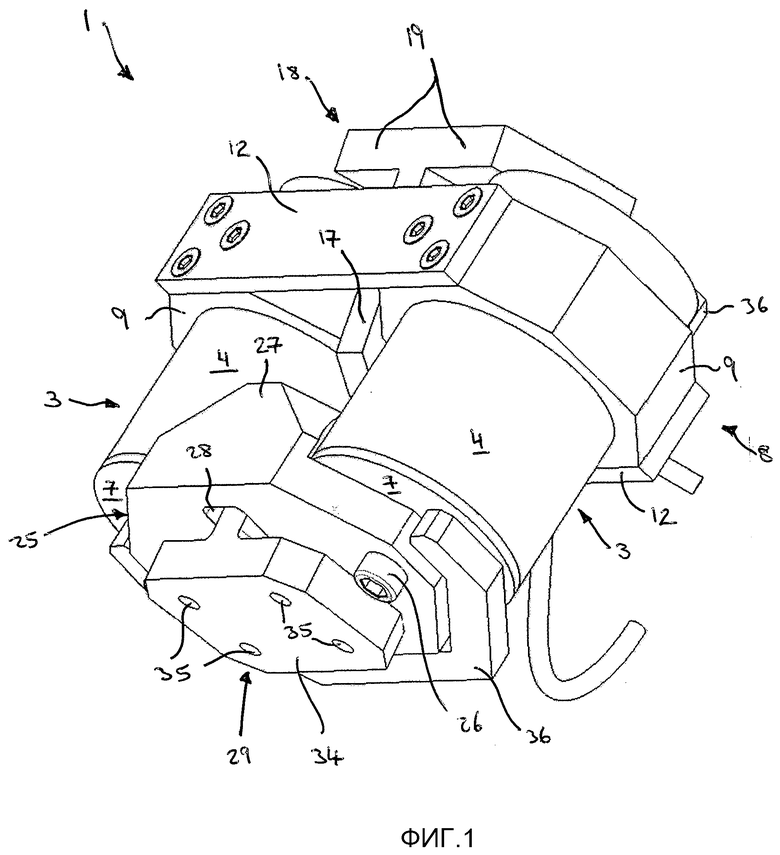
1. Исполнительная система для управления разворачиванием поверхности управления от крыла воздушного летательного аппарата, содержащая пару разнесенных параллельных исполнительных устройств, каждое из которых содержит гидравлический цилиндр (4) и поршень (5), расположенный с возможностью перемещения в цилиндре (4), а также подшипниковый узел для установки указанных разнесенных параллельных исполнительных устройств (3) между крылом и поверхностью управления воздушного летательного аппарата так, что исполнительные устройства (3) совместно управляют разворачиванием указанной поверхности управления от крыла, при этом подшипниковый узел (14) содержит неподвижный элемент (18) для прикрепления к крылу воздушного летательного аппарата и подвижный элемент (8), при этом подвижный элемент (8) выполнен с возможностью прикрепления к гидравлическим цилиндрам (4), так что подвижный элемент (8) и исполнительные устройства поворачиваются вместе вокруг подшипникового узла (14) относительно неподвижного элемента, отличающаяся тем, что подшипниковый узел содержит частично сферический подшипник и выполнен так, что частично сферический подшипник остается в пространстве между гидравлическими цилиндрами, к которым подвижный элемент прикреплен, независимо от положения поршней (5) относительно соответствующих им цилиндров (4), в которых они расположены с возможностью перемещения.
2. Исполнительная система по п.1, в которой подвижный элемент (8) содержит ось (10), проходящую через пространство между цилиндрами (4), при этом предусмотрена возможность установки на указанной оси (10) первого частично сферического подшипника (14).
3. Исполнительная система по п.2, в которой неподвижный опорный элемент (18) содержит консоль (17), которая проходит в пространство между цилиндрами (4), причем консоль (17) содержит отверстие (15), которое образует гнездо подшипника для приема первого частично сферического подшипника (14), установленного на оси (10) первого подвижного опорного элемента (18) с обеспечением возможности вращения неподвижного и подвижного опорных элементов (18, 8) относительно друг друга вокруг первого частично сферического подшипника (14).
4. Исполнительная система по п.3, в которой консоль (17) первого неподвижного опорного элемента (18) выполнена из двух разделяемых частей (18а, 18b), которые соединяются с образованием гнезда (15) подшипника и охватыванием первого частично сферического подшипника (14).
5. Исполнительная система по п.4, в которой первый неподвижный опорный элемент (18) содержит фланец (19) на одном конце, удаленном от гнезда (15) подшипника, причем фланец (19) содержит средство для обеспечения прикрепления консоли (17) к воздушному летательному аппарату.
6. Исполнительная система по любому из пп.2-5, в которой подвижный элемент (8) содержит кольцо (9) на каждом конце оси (10) для приема цилиндра (4) каждого исполнительного устройства (3) в соответствующих кольцах (9).
7. Исполнительная система по любому из пп.2-5, в которой второй подвижный опорный элемент (25) выполнен с возможностью прикрепления к свободному концу каждого поршня (5), выдвигающихся из соответствующих им цилиндров (4) так, что поршни (5) перемещаются синхронно в соответствующие им цилиндры (4) и из них.
8. Исполнительная система по п.7, в которой второй подвижный опорный элемент (25) содержит центральный участок (27), расположенный между поршнями (5) и отверстием (28), проходящим через упомянутый центральный участок (27), для приема и установки второго частично сферического подшипника (32) между упомянутыми поршнями (5).
9. Исполнительная система по п.8, содержащая отверстие (28) в центральном участке (27) для приема и прикрепления штифта (33), проходящего вбок через отверстие (28), причем второй частично сферический подшипник (32) выполнен с возможностью установки на штифт (33).
10. Исполнительная система по п.8, в которой второй неподвижный опорный элемент (29) содержит консоль (30), выполненную с возможностью прохождения в отверстие (28) в центральном участке (27) второго подвижного опорного элемента (25) и содержащую отверстие (31), которое образует гнездо подшипника для приема второго частично сферического подшипника (32), установленного в упомянутом отверстии (31) во втором подвижном опорном элементе (29) так, что вторые неподвижный и подвижный элементы (29, 25) вращаются относительно друг друга вокруг второго частично сферического подшипника (32).
11. Исполнительная система по п.10, в которой консоль (30) второго неподвижного опорного элемента (29) выполнена из двух частей (30а, 30b), которые соединяются с образованием гнезда (31) подшипника и охватыванием второго частично сферического подшипника (32).
12. Исполнительная система по п.10, в которой второй неподвижный опорный элемент (29) содержит фланец (34) на одном конце, удаленном от гнезда (31) подшипника, причем фланец (34) содержит средство для обеспечения прикрепления консоли (30) к воздушному летательному аппарату.
13. Исполнительная система по любому из пп.2-5, содержащая трубопровод для подсоединения по текучей среде одного источника текучей среды к обоим цилиндрам.
14. Исполнительная система по п.13, в которой отдельный трубопровод выполнен с возможностью закрепления на каждом конце пары цилиндров.
15. Исполнительная система по п.13, в которой концы каждого цилиндра (4) закрыты пластиной (7) и трубопровод (36) выполнен с возможностью прикрепления к пластинам (7) на одном конце пары цилиндров (4) с прохождением между ними, причем каждая пластина (7) содержит канал, проходящий через нее, для соединения по текучей среде трубопровода (36) с цилиндрами (4).
| DE 2851878 A1, 13.03.1980 | |||
| JP 10078009 A, 24.03.1998 | |||
| РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2210681C2 |

