Изобретение относится к авиационной технике, а конкретно к безмоторным летательным аппаратам тяжелее воздуха, использующим в качестве движителя машущие крылья, приводимые в движение мускульной силой человека (мускулолетам).
Известны безмоторные летательные аппараты, в которых для создания подъемной силы и тяги используется мускульная сила человека. К ним можно отнести, например, аппараты с неподвижным крылом и движителем в виде воздушного винта или аппараты с машущими крыльями, которые являются средством получения подъемной силы и тяги.
К наиболее известным мускулолетам с машущими крыльями можно отнести летательные аппараты разработки Черановского Б.И. Первый образец, построенный им в 1921 г. , представлял собой планер, снабженный двумя парами расположенных друг над другом гибких крыльев, связанных с несущей рамой. При перемещении верхних крыльев вниз нижние крылья поднимались вверх. В процессе такого перемещения создавалась подъемная сила. Летные испытания упомянутой конструкции выявили серьезные недостатки такой аэродинамической схемы.
В 1934 г. Черановским Б.И. был построен планер БИЧ-16, в котором частично были устранены недостатки предыдущей конструкции. В основу этого планера была положена идея уравновешивания крыльев. Это осуществлялось путем крепления подкосов в центрах давления гибких крыльев, относительно которых и осуществлялись колебания гибких крыльев. По существу планер представлял собой летающее крыло. Однако отсутствие хвоста создавало проблемы с устойчивостью и управляемостью планера.
Дальнейшее усовершенствование этой конструкции получило в планере БИЧ-18, построенном в 1937 г. На этот раз планер имел, в основном, все узлы и элементы, присущие подобным летательным аппаратам: фюзеляж, систему крыльев, хвост с соответствующим оперением. Полеты на БИЧ-18 совершались на аэродроме Тушино в Москве. Мускулолет БИЧ-18 взлетал с помощью растянутого резинового амортизатора, и уже в полете пилот с помощью педального привода перемещал две пары крыльев, каждая из которых была уравновешена аэродинамически. Крылья крепились в верхней части фюзеляжа, причем в каждой паре крыльев одно крыло являлось продолжением другого. Однако махание крыльями не оказывало существенного влияния на увеличение подъемной силы, т.к. они были жесткими и имели постоянный угол установки. Предпринятая попытка выполнить крылья гибкими привела к возникновению в полете сильных вибраций, способных разрушить летательный аппарат (С. Малик. "От Икара до наших дней", статья в журнале "Моделист-конструктор", 1978, 2).
Известен летательный аппарат с машущим крылом, имеющий фюзеляж, V-образное хвостовое оперение с аэродинамическими рулями и шасси. Аппарат выполнен по схеме "тандем", т.е. снабжен двумя крыльями, расположенными друг за другом. Оба крыла, переднее и заднее (по направлению полета), состоят из двух частей - правой и левой, которые крепятся к фюзеляжу с помощью шарниров и могут совершать вокруг этих шарниров машущие движения. Крылья имеют подкосы, кинематически связанные друг с другом специальным коромыслом, соединенным с валом двигателя, и совершают синхронные машущие движения. Однако в данной конструкции не предусмотрено управление углом атаки крыльев и управление креном аппарата. Кроме того, аппарат имеет большое лобовое сопротивление, обусловленное наличием двух крыльев (патент США 2407777, НПК Кл.244-16, опубл. 1946).
Известен мускулолет, правое и левое крыло которого состоит из двух частей - внешней и внутренней, связанных между собой шарниром. Пилот, лежа в фюзеляже на груди, руками с помощью рычажной передачи совершает машущие движения крыльями. Конструкция снабжена автоматическими предкрылками, расположенными на внутренних частях крыла, и гибкими закрылками, которые управляются с помощью упомянутой рычажной передачи, что и крылья. Аппарат не предназначен для совершения самостоятельного взлета, т.к. не оборудован посадочными устройствами (шасси, лыжи). Крыло не обеспечивает изменения угла атаки в процессе полета, а вместо этого пилот отклоняет закрылки, что приводит к возрастанию лобового сопротивления и увеличению энергозатрат для выполнения полета. К тому же аппарат не имеет управления по крену, что существенно ограничивает его маневренность (патент Германии 3320985 С2, МПК В 64 С 31/04, опубл. 1985).
Известен также летательный аппарат с машущими крыльями, приводимыми в движение мускульной силой ног человека с помощью педалей либо с помощью двигателя. Левая и правая консоли крыла аппарата состоят из двух частей - корневой и концевой. Крепятся консоли к фюзеляжу с помощью шарнира. Корневая и концевая части консоли также соединены шарниром, благодаря которому концевая часть при маховом движении корневой части вверх перемещается вниз, а при махе вниз - возвращается в первоначальное положение с помощью тросовых тяг, соединяющих шарнир внешней части консоли с фюзеляжем. Таким образом, имитируется "птичий" взмах крылом. Каждая консоль крыла, в процессе машущего движения, может перемещаться относительно фюзеляжа вперед (при взмахе вверх) и назад - (при взмахе вниз) и поворачиваться вокруг лонжерона крыла, изменяя при этом угол атаки. В данной конструкции маховые движения крыла и изменения угла атаки производятся с постоянной амплитудой независимо от режима полета (взлет, маршрут, посадка), что не позволяет пилоту оперативно менять режим полета (скорость, высоту, режим планирования). Не обеспечено управление аппаратом по каналам крена и рысканья, кроме того, аппарат не оборудован шасси для взлета и посадки (патент Германии 3537365 С2, МПК В 64 С 33/02, опубл. 1987).
Известна конструкция мускулолета, в котором консоли крыла, состоящие из корневой и концевой частей, связаны шарниром и прикреплены к рукам человека с использованием в качестве шарнира каждой консоли плечевого сустава человека, а горизонтальное оперение прикреплено к ногам человека. Корневая часть крыла выполнена в виде разрезного крыла (применяемого для гибких крыльев в современных парапланах). Однако такая конструкция аппарата допускает лишь планирующий полет и только при условии соблюдения требуемой для этого центровки и продольной балансировки. В конструкции аэродинамический фокус крыла расположен впереди его центра тяжести, что обуславливает статическую неустойчивость аппарата в полете. Кроме того, мускульных сил человека недостаточно для длительного удержания крыльев в горизонтальном положении, а тем более для совершения машущих движений. Конструкция напоминает аппарат, описанный в древних преданиях и построенный мифическим Дедалом (патентная заявка Франции 2598381, МПК В 64 С 33/00, опубл. 1987).
Известен также мотодельтаплан, имеющий фюзеляж с местом пилота, двигателем с движителем в виде воздушного винта. Фюзеляж подвешен на шарнире к жесткому крылу, которое снабжено триммерной поверхностью, расположенной впереди основного крыла на специальной балке. Триммерная поверхность выполнена с возможностью изменения своего угла атаки относительно угла атаки основного крыла с помощью электропривода и механической тяги, регулируя при этом усилия на ручке управления пилота в длительном полете и при изменении режимов полета. В этом аппарате крыло не является движителем, а служит лишь для осоздания подъемной силы (авторское свидетельство СССР 1821422, МПК В 64 С 31/02, опубл. 1993).
Известен способ кабрирования крылом махолета, суть которого заключается в том, что под влиянием аэродинамических сил, сил управления перемещением крыла и изменения угла атаки с помощью специального автомата перекоса крыло совершает движение в виде "восьмерки", если смотреть на него сбоку. В результате реализации этого движения возникают подъемная сила и сила тяги. Следует заметить, что для горизонтального полета нет необходимости в совершении крылом перемещения по траектории "восьмерки". Такое движение создает дополнительное лобовое сопротивление, увеличивает энергозатраты, необходимые для полета мускулолета и должно использоваться, скорее, для режима "висения" (как висит на одном месте, например, муха либо колибри). Мускульной силы человека недостаточно для выполнения такого режима работы в длительном, автономном полете (международная заявка PCT/RU 98/00135, МПК В 64 С 33/02, опубл. 1998).
Наиболее близким к настоящему изобретению по технической сущности и достигаемому техническому результату при использовании является летательный аппарат с движителем в виде машущих крыльев, способный совершать планирующие полеты после подъема его на высоту буксировщиком, причем длительность и дальность этих полетов с использованием машущих крыльев увеличиваются. Аппарат предназначается для спортивных соревнований и развлечения. Аппарат снабжен двумя крыльями - неподвижным и в качестве движителя - машущим, расположенным под неподвижным. Неподвижное крыло выполнено с обшивкой из гибкого материала аналогично крыльям дельтапланов. Летательный аппарат снабжен также горизонтальным оперением с рулем высоты, рулем направления и шасси для выполнения посадки. Пилот располагается в лежачем положении на нижней силовой балке под крыльями и, воздействуя ногами на педальный цепной привод, приводит его в движение, которое по системе тяг преобразуется в машущие движения крыльев. Каждая консоль машущего крыла состоит из внутренней и внешней частей, соединенных между собой единым лонжероном с механизмом изменения угла установки этих частей (угла атаки), выполненным в виде проходящей через шарнирный узел стойки, в которой имеются отверстия для прохождения гибких тяг, закрепленных на носовых и хвостовых участках хорды частей машущего крыла, а внутренняя часть машущего крыла жестко соединена с тягой, другой конец которой связан с ползуном, расположенным в направляющей, лежащей вдоль корпуса. Машущее крыло приводится в движение посредством мускульного цепного педального привода (типа велосипедного). Шарнир крыла выполнен по типу "весло-уключина", т. е. когда внутренняя часть крыла под действием педального привода опускается, то внешняя - поднимается, при этом изменяемый в постоянных пределах угол атаки внутренней и внешней частей крыла при их движении вниз изменяется от положительного до отрицательного, а при движении вверх - от отрицательного до положительного - крыло перекашивается (авторское свидетельство СССР 1785953, МПК 5 В 64 С 31/04, 33/02, опубл. 1993).
В данном аппарате удалось решить многие из перечисленных выше проблем и недостатков, свойственных аналогичным летательным аппаратам, представляющим известный уровень техники. Однако он также не свободен от недостатков, из которых наиболее значимые заключаются в том, что человек, используя свою мускульную силу, не может на этом аппарате самостоятельно взлетать (а только лишь с помощью резинового амортизатора, лебедки или буксировщика) и совершать длительный, автономный полет. В аппарате не предусмотрена возможность изменения человеком в полете угла атаки крыльев независимо от процесса выполнения ими циклических маховых движений, что необходимо для оперативного изменения режимов полета и обеспечения его безопасности. Узел подвески фюзеляжа к крылу не содержит регулируемого пружинного устройства, позволяющего существенно снизить усилия человека, совершающего полет. Конструкция крыла и способ подвески к нему фюзеляжа ("весло-уключина") не позволяют использовать его в режиме наиболее эффективного создания подъемной силы и силы тяги. Неподвижное гибкое крыло малого удлинения создает существенное лобовое сопротивление, для преодоления которого необходимы энергетические затраты, превышающие физические возможности человека. Конструкция не предусматривает управление креном аппарата, без чего невозможно эффективное маневрирование при совершении полета.
Задача, положенная в основу настоящего изобретения, заключается в создании летательного аппарата, свободного от отмеченных выше недостатков, т.е. летательного аппарата в большей степени автономного, управляемого и более эффективно использующего технические возможности конструкции и физические ресурсы пилота.
Технический результат, достигаемый при использовании настоящего изобретения, обеспечивает повышение управляемости, маневренности аппарата, более эффективное использование создаваемых подъемной силы и тяги, а также мускульных ресурсов пилота, что в итоге увеличивает длительность, дальность полета и существенно повышает безопасность полета.
Задача, на решение которой направлено данное изобретение с достижением упомянутого выше технического результата, решается тем, что в известном летательном аппарате с движителем в виде машущих крыльев, содержащем фюзеляж с кабиной пилота, горизонтальным и хвостовым вертикальным оперением и трехколесным шасси, систему крыла, прикрепленную к фюзеляжу посредством узла подвески и связанную с рычажно-педальным приводом, систему управления полетом летательного аппарата - в нем:
крыло выполнено с аэродинамической круткой профиля и состоит из трех частей - средней и двух концевых частей, корневые хорды которых соединены с концевыми хордами средней части с помощью шарниров, оси которых ориентированы параллельно хорде крыла, при этом средняя часть системы крыла имеет балансировочную поверхность, а концевые части снабжены механической системой синхронизации их возвратно-поступательного (машущего) движения в вертикальной плоскости и элеронами и подпружинены к средней части, посредством механизма с изменяющейся жесткостью;
узел подвески системы крыла к фюзеляжу выполнен в виде рычажно-пружинного механизма, содержащего два подкоса, расположенные с обеих сторон фюзеляжа, одни концы которых соединены с фюзеляжем посредством шарниров, а другие концы подкосов - с рычагами входных осей карданных устройств, выходные оси вращения которых являются осями шарниров, посредством которых концевые части крыла соединены со средней частью крыла, при этом подкосы снабжены механической системой синхронизации их движения в вертикальной плоскости;
трехколесное шасси снабжено двумя передними самоориентирующимися колесами, а заднее колесо имеет звездочку, обеспечивающую его вращение посредством передачи движения от рычажно-педального привода;
- а также тем, что в нем в карданном устройстве входной осью является рычаг крепления карданного устройства к подкосам, а выходной осью - ось шарнира крепления концевой части крыла к средней части крыла;
- а также тем, что в нем механизм с изменяющейся жесткостью содержит пневматический силовой цилиндр, шарнирно связанный со средней частью крыла, а шток поршня пневматического силового цилиндра шарнирно связан с рычагом, жестко соединенным с осью шарнира крепления концевой части к средней части крыла, при этом силовой цилиндр имеет клапан, сообщающий его с атмосферой, и посредством системы тяг соединен с рукояткой управления, расположенной на штурвале колонки управления углом атаки крыла;
- а также тем, что в нем механическая система синхронизации возвратно-поступательного перемещения обеих концевых частей крыла в вертикальном направлении содержит рычаги, жестко скрепленные с выходными осями соответствующего карданного устройства, при этом верхний конец правого рычага соединен синхронизирующим тросом с нижним концом левого рычага, а его верхний конец соединен синхронизирующим тросом с нижним концом правого рычага;
- а также тем, что в нем в качестве передачи движения от рычажно-педального привода к заднему колесу использована цепная передача;
- а также тем, что в нем балансировочная поверхность выполнена в виде переднего горизонтального оперения, представляющего собой аэродинамическую поверхность с профилем, идентичным профилю средней части крыла, жестко связанную посредством кронштейнов со средней частью крыла;
- а также тем, что в нем узел рычажно-педального привода для перемещения крыла по вертикали выполнен в виде двух бесконечных тросов, каждый из которых надет на, по крайней мере, три ролика, закрепленные на фюзеляже, слева и справа от пилота, при этом горизонтальные и вертикальные участки упомянутых тросов жестко соединены друг с другом перемычкой, причем на перемычке, соединяющей горизонтальные участки тросов, установлены педали привода, а перемычка, соединяющая вертикальные участки тросов, шарнирно соединена со средней частью крыла;
- а также тем, что в нем механическая система синхронизации вертикального перемещения подкосов рычажно-пружинного механизма подвески крыла содержит рычаги, жестко скрепленные с концами подкосов, шарнирно соединенными с шпангоутом фюзеляжа, при этом верхний конец правого рычага соединен синхронизирующим тросом с нижним концом левого рычага, а его верхний конец соединен синхронизирующим тросом с нижним концом правого рычага.
Изобретение иллюстрируется графическими материалами:
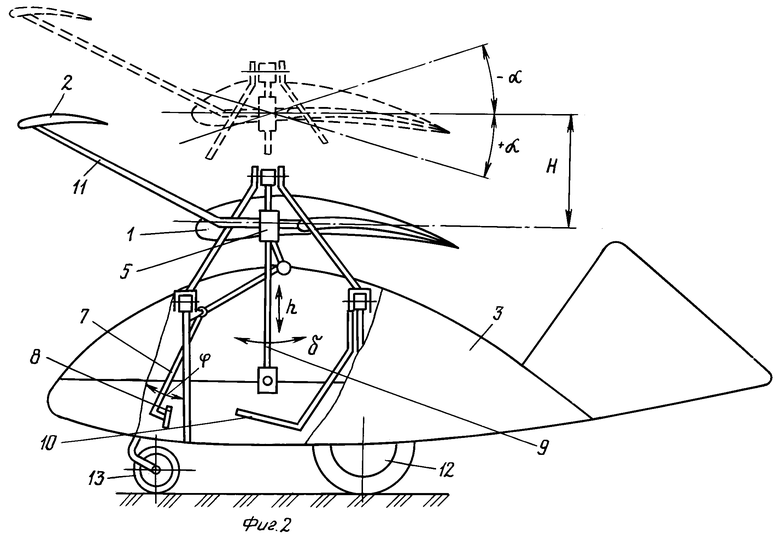
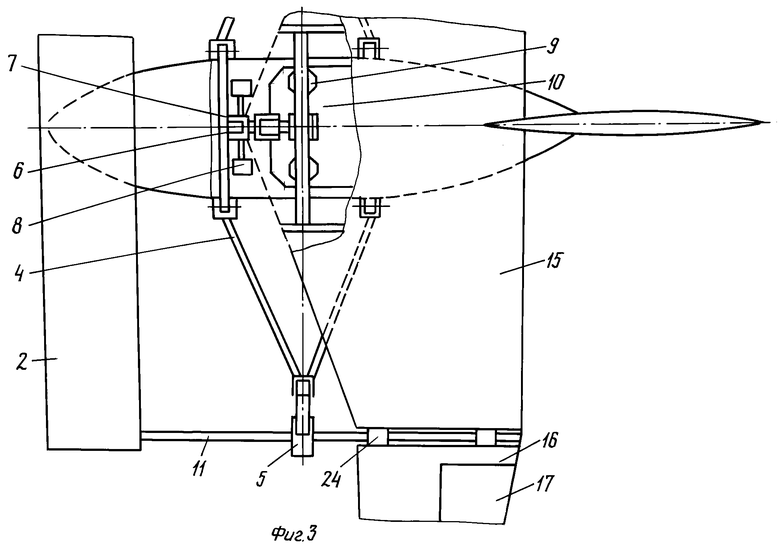
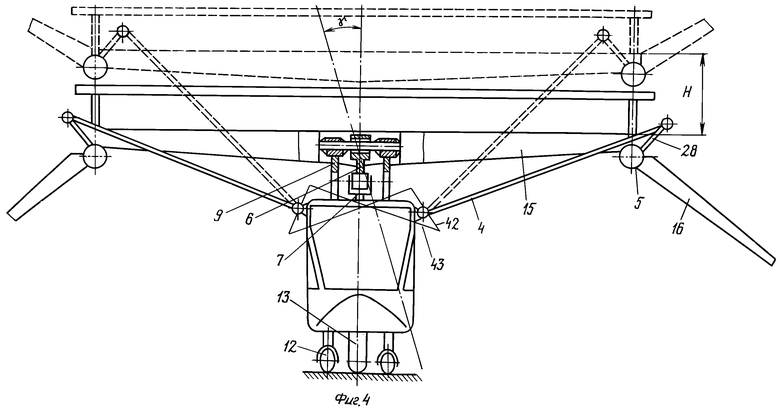
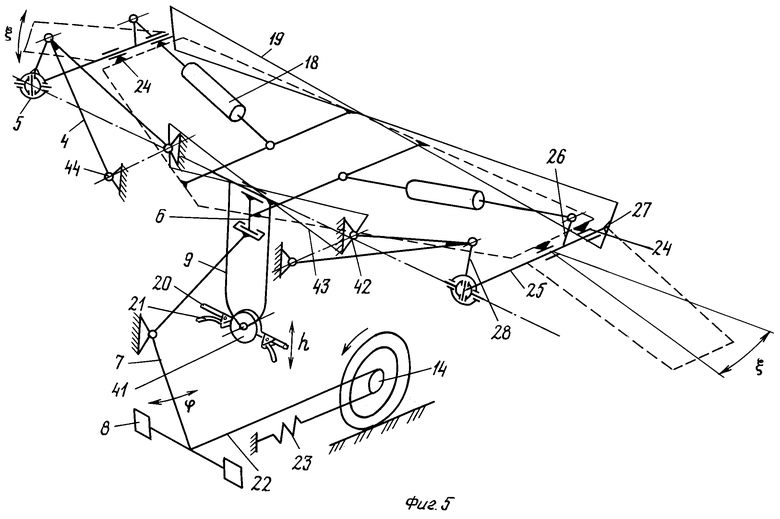
на фиг.1 показан общий вид летательного аппарата; на фиг.2 приведен вид летательного аппарата сбоку; на фиг.3 - вид летательного аппарата сверху; на фиг. 4 - вид летательного аппарата спереди; на фиг.5 показана принципиальная кинематическая схема летательного аппарата; на фиг.6 представлены вид и разрез карданного устройства; на фиг.7 показана схема пневматического силового цилиндра, а на фиг.8 схематично показана кинематика управления вертикальным перемещением крыла посредством тросовой передачи.
Крыло 1, жестко соединенное с передним горизонтальным оперением 2, крепится к шпангоутам фюзеляжа 3 с помощью подкосов 4, одни концы которых шарнирно соединены со шпангоутами фюзеляжа, а другие концы - с рычагами 28 карданных устройств 5. К крылу 1 через промежуточную качалку 6 подсоединен угловой рычаг 7 для перемещения крыла 1 ногами в вертикальном направлении, снабженный педалями 8 для ног. Педали 8 имеют средство (например, привязные ремни, которые на чертеже не показаны), фиксирующее ступни пилота на педалях. К крылу 1 жестко крепится колонка 9 управления углом атаки крыла. В фюзеляже 3 расположено кресло 10 пилота с привязными ремнями для фиксации пилота в кресле (не показаны). Переднее горизонтальное оперение 2 крепится к крылу 1 с помощью кронштейнов 11. Летательный аппарат имеет шасси, состоящие из 2-х передних колес 12 и одного заднего колеса 13. На заднем колесе 13 установлена звездочка 14, имеющая муфту сцепления с задним колесом (не показана) аналогичную, например, велосипедной.
На фиг.2 кроме основных узлов летательного аппарата, для удобства понимания существа изобретения, обозначены направления перемещений его подвижных частей:
- перемещение крыла 1 в вертикальном направлении - Н;
- изменение угла атаки крыла 1 в полете - ±угол α;
- перемещение колонки 9 управления углом атаки крыла 1 по вертикали - h;
- отклонение колонки 9 управления в вертикальной плоскости при изменении угла атаки - угол δ;
- угловое отклонение рычага 7 перемещения крыла 1 ногами в вертикальной плоскости - ϕ.
На фиг. 4 (вид спереди) показан угол крена летательного аппарата - угол γ.
На фиг.5 показан угол отклонения концевых частей крыла - ξ относительно средней части крыла.
Конфигурация крыла 1 включает среднюю часть 15 балансирной поверхности с жестко соединенным с ней с помощью кронштейнов 11 передним горизонтальным оперением 2 и две концевые части 16, соединенные со средней частью с помощью горизонтальных шарниров 24. На концевых частях 16 крыла расположены элероны 17 для управления летательным аппаратом по каналу крена.
Пневматические силовые цилиндры 18 механизма с изменяющейся жесткостью установлены в крыле 1 и крепятся одним концом к поперечным конструктивным элементам крыла, а другим - к рычагам 26 карданных устройств 5. Для синхронизации отклонения концевых частей 16 крыла на угол ξ рычаги 27 карданных устройств 5 соединены синхронизирующими тросами 19. На колонке 9 управления углом атаки крыла 1 расположены рукоятки штурвала 20 для управления углом крена летательного аппарата, соединенные с элеронами 17 тросовыми тягами (тяги на фигуре не показаны), и рукоятки 21 управления клапанами 36 силовых цилиндров 18, соединенные с клапанами 36 тросовой проводкой (проводка на фигуре также не показана). К угловому рычагу 7 подсоединена гибкая тяга 22 (например, велосипедная цепь), одним концом идущая к звездочке 14 заднего колеса 13 шасси, а противоположный конец тяги соединен с возвратной пружиной 23. Средняя часть 15 крыла соединена с концевыми частями 16 с помощью шарниров 24.
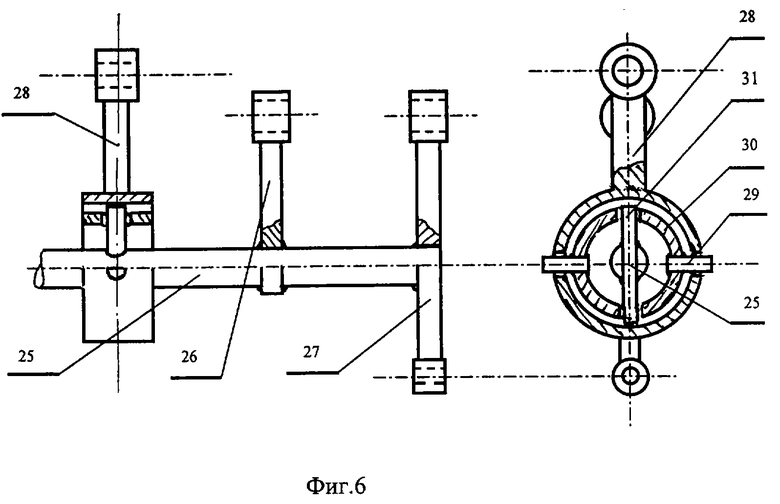
Карданное устройство 5 (фиг.6) имеет выходную ось 25, на которой расположены рычаг 26 крепления пневматического силового цилиндра 18 и рычаг 27 крепления синхронизирующих тросов 19. Рычаг 28 карданного устройства 5, являющийся его входным узлом, соединен осью 29 с внутренним звеном 30 карданного устройства 5, которое, в свою очередь, соединено с выходной осью 25 карданного устройства 5 посредством оси 31 внутреннего звена 30 карданного устройства 5.
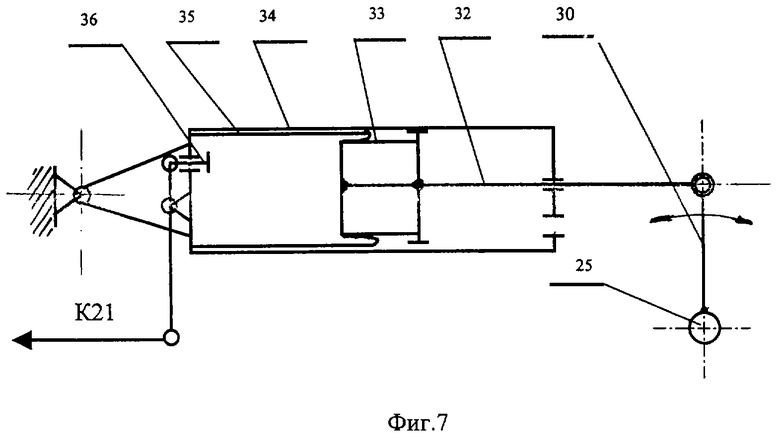
Пневматический силовой цилиндр 18 (фиг.7) имеет шток 32, соединенный неподвижно с поршнем 33, который свободно перемещается внутри цилиндра 34. Поршень 33 соединен с цилиндром 34 с помощью гибкого (например, резинового) чулка 35, который позволяет поршню 33 свободно перемещаться вдоль цилиндра 34, обеспечивая герметичность внутренней полости цилиндра. На торцевой части цилиндра 34 установлен воздушный клапан 36, который посредством тросовой тяги соединен с рукояткой 21 управления клапанами.
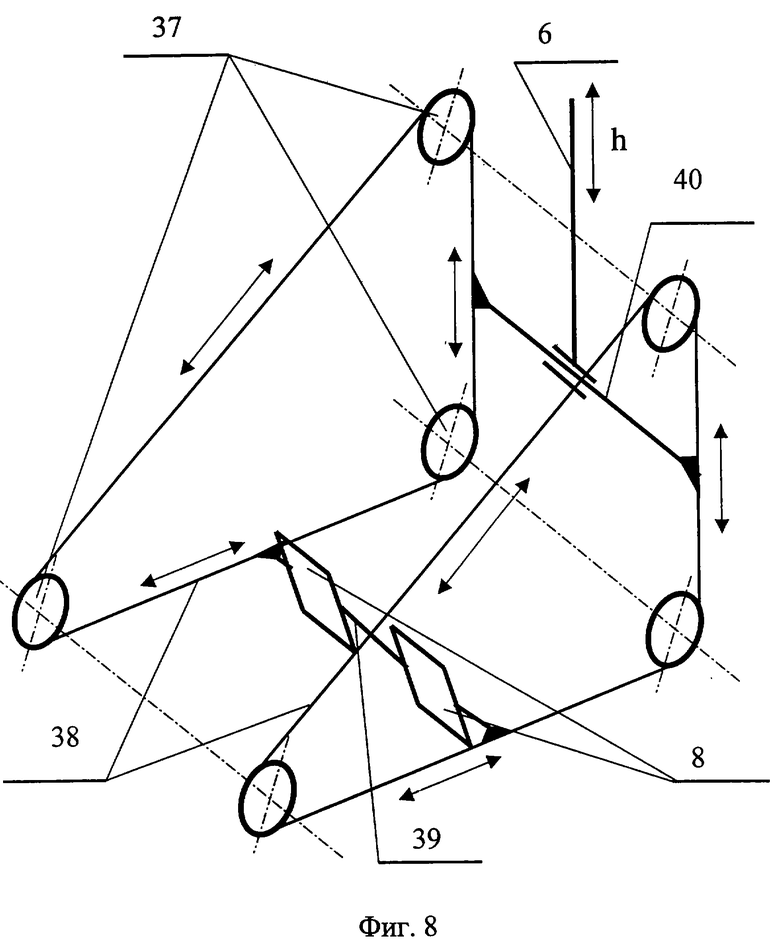
Другой вариант управления вертикальным перемещением крыла 1 ногами пилота может осуществляться также и с помощью тросовой передачи. Передача (фиг. 8) включает, например, шесть роликов 37. На каждом борту фюзеляжа 3, справа и слева от пилота, установлены по три ролика 37, которые соединены бесконечными тросами 38. Нижние участки тросов 38 жестко соединены перемычкой 39, на которой размещены педали 8 для ног пилота. Вертикальные участки тросов 38, также жестко связаны между собой перемычкой 40, средняя часть которой, в свою очередь, шарнирно соединена с одним из концов промежуточной качалки 6, второй конец которой также шарнирно соединен с конструктивными элементами крыла 1 летательного аппарата.
Для синхронизации вертикального перемещения подкосов 4 в вертикальной плоскости их концы шарнирно прикреплены к шпангоутам фюзеляжа 3, снабжены рычагами 42 (фиг. 4), которые жестко соединены с подкосами 4 шарнирами 44 крепления подкосов 4 к шпангоутам фюзеляжа, при этом верхний конец рычага правого подкоса соединен синхронизирующим тросом 43 с нижним концом рычага левого подкоса, а его нижний конец соединен синхронизирующим тросом с верхним концом рычага правого подкоса.
Летательный аппарат функционирует следующим образом. Пилот летательного аппарата размещается в кресле 10, установленном в фюзеляже 3, расположив ноги на педалях 8 и держа руками рукоятки 20 штурвала 41 колонки управления 9 углом атаки крыла 1.
Выполнение полета осуществляется по этапам, которые включают: разбег по земле, взлет, полет по маршруту, снижение и посадку.
В режиме разбега пилот, сидя в кресле 10, сгибает ноги в коленных и бедренных суставах и воздействует через педали 8 на угловой рычаг 7, перемещая его "на себя" (фиг.2) на угол ϕ. Угловой рычаг 7 через промежуточную качалку 6 приводит в движение крыло 1. Крыло 1 поднимается вверх в направлении Н до верхнего крайнего положения (до упора). Одновременно пилот поднимает колонку управления 9 руками за рукоятки 20 штурвала 41 вверх, используя, таким образом, для подъема крыла 1 в верхнее положение еще и усилия рук. При этом пилот перемещает пальцами рук рукоятки 21 управления клапанами 36 силовых цилиндров 18, обеспечивая связь внутренних полостей пневматических силовых цилиндров 18 с атмосферой.
Крыло 1, поднимаясь вверх, вращает подкосы 4 подвески фюзеляжа 3 к крылу 1 относительно их шарниров на фюзеляже. Подкосы 4 воздействуют на рычаги 28 карданных устройств 5. Рычаги 28, поворачиваясь в разные стороны (фиг.4), через оси 29 входных рычагов карданных устройств 5, внутренние звенья 30 карданных устройств 5 и оси 31 внутренних звеньев 30 карданных устройств 5 передают вращение на выходные оси 25 карданных устройств 5, являющиеся осями шарниров 24 концевых частей 16 крыльев 1 и жестко с ними соединенных. Благодаря этому, а также синхронизирующим тросам 19, соединяющим рычаги 27 крепления синхронизирующих тросов 19 карданных устройств 5, концевые части 16 крыла 1 синхронно поднимаются, как и крыло 1, вверх.
При движении углового рычага 7 "на себя" возвратная пружина 23, сокращаясь, заставляет велосипедную муфту звездочки 14 проскальзывать относительно заднего колеса 13 шасси, сохраняя тем самым гибкую тягу 22 в натянутом положении.
Далее пилот разгибает ноги ("от себя"), вращая угловой рычаг 7 в обратном направлении, и опускает руками колонку управления 9 вниз. При этом крыло 1 опускается в нижнее положение, концевые части 16 крыла 1 также опускаются, а гибкая тяга 22 вращает через звездочку 14 заднее колесо 13 шасси, и летательный аппарат начинает движение по земле.
Таким образом, пилот, совершая периодически аналогичные описанным выше движения руками (вверх-вниз) и ногами ("на себя" и "от себя"), обеспечивает машущие движения крылом с усилиями и частотой, определяемыми его физическим состоянием, разгоняет летательный аппарат до скорости отрыва от земли. В процессе разбега и выполнения машущих движений крылом пилот одновременно изменяет угол атаки крыла ±α в необходимых пределах, определяемых руководством по летной эксплуатации, путем перемещения руками колонки управления 9 "на себя" и "от себя" (фиг.2). В процессе выполнения разбега скорость движения увеличивается, крыло приобретает необходимые для отрыва от земли подъемную силу и силу тяги.
В режиме взлета при достижении скорости взлета, величину которой пилот устанавливает по указателю скорости (на фиг. не показан), а также по увеличению нагрузки на руки и ноги, в момент достижения крылом 1 нижнего положения, с помощью рукояток управления 21 клапанами 36 силовых цилиндров 18 пилот перекрывает сообщение внутренних полостей силовых цилиндров 18 с атмосферой.
В результате воздействия подъемной силы и усилий пилота при последующем движении крыла 1 вверх поршни 33, перемещаясь вдоль цилиндров 34, уменьшают объем воздуха в рабочих полостях цилиндров, давление в полостях увеличивается и образующееся в результате увеличения давления усилие, являющееся следствием действия подъемной силы на крыло 1 и усилий пилота, через штоки 32 поршней 33 передается на выходную ось 25 карданных устройств 5 и далее через оси 31, звенья 30, оси 29, рычаги 28 и подкосы 4 - на фюзеляж 3. При следующем перемещении пилотом крыла 1 сверху вниз происходит взлет, а пневматические силовые цилиндры 18 срабатывают как сжатая пружина - на разжимание, помогая пилоту совершить машущее движение для осуществления взлета.
Полет по маршруту осуществляется в результате совершения пилотом периодических машущих движений крылом 1, как было описано выше, в процессе которых пилот, меняя угол атаки α крыла 1 путем перемещения колонки управления 9 "на себя" или "от себя" и увеличивая или уменьшая усилия, прикладываемые для перемещения крыла 1, и величину амплитуды этих перемещений, может по желанию увеличить или уменьшить высоту и скорость полета. Изменение направления полета осуществляется путем отклонения пилотом рукояток 20 штурвала 41 по часовой или против часовой стрелки, в результате чего с помощью специальных тросовых тяг, которые соединяют рукоятки 20 с элеронами 17, расположенными на концевых частях 16 крыла 1, элероны 17 отклоняются в противоположные стороны (правый - вверх, левый - вниз, и наоборот в зависимости от необходимого изменения направления полета). Отклонение элеронов 17 приводит к появлению крена летательного аппарата вправо или влево по углу γ (фиг.4) и к изменению направления полета.
В режиме снижения и посадки пилот уменьшает амплитуду колебаний крыла 1 либо прекращает машущие движения совсем, и, управляя углом атаки α крыла 1 и углом крена γ летательного аппарата, совершает приземление аналогично безмоторным летательным аппаратам (типа планер) с последующим пробегом по земле на колесах 12 и 13 шасси.
Аэродинамическая компоновка летательного аппарата выполнена по схеме "утка" - с передним горизонтальным оперением 2, жестко соединенным со средней частью 15 крыла 1. Переднее горизонтальное оперение имеет профиль, аналогичный профилю средней части 15 крыла 1. Крыло 1 летательного аппарата спроектировано с применением аэродинамической крутки с целью обеспечения безопасности полета путем предотвращения возникновения крена γ в режиме срыва подъемной силы летательного аппарата при выходе на большие углы атаки и перехода далее в штопор.
Результаты моделирования летательного аппарата и летные испытания его модели показали соответствие расчетных данных полученным практическим результатам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| Моторный орнитоптер | 1959 |
|
SU131618A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| Летательный аппарат с движителем в виде машущих крыльев | 1988 |
|
SU1785953A1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
Изобретение относится к авиационной технике, а конкретно к безмоторным летательным аппаратам тяжелее воздуха. Летательный аппарат содержит фюзеляж с кабиной пилота, горизонтальное и хвостовое вертикальное оперение, трехколесное шасси, крыло, прикрепленное к фюзеляжу посредством узла подвески и связанное с рычажно-педальным приводом, а также систему управления полетом. Крыло выполнено с аэродинамической круткой профиля. Корневые хорды двух концевых частей крыла соединены с концевыми хордами средней части с помощью шарниров, оси которых ориентированы параллельно хорде крыла. Средняя часть крыла имеет балансировочную поверхность. Концевые части снабжены механической системой синхронизации их возвратно-поступательного движения в вертикальном направлении и элеронами и подпружинены к средней части посредством механизма с изменяющейся жесткостью. Узел подвески системы крыла к фюзеляжу выполнен в виде рычажно-пружинного механизма. Трехколесное шасси снабжено двумя передними самоориентирующимися колесами, а заднее колесо имеет звездочку, обеспечивающую его вращение посредством передачи движения от рычажно-педального привода. Изобретение направлено на повышение длительности и дальности полета. 7 з.п.ф-лы, 8 ил.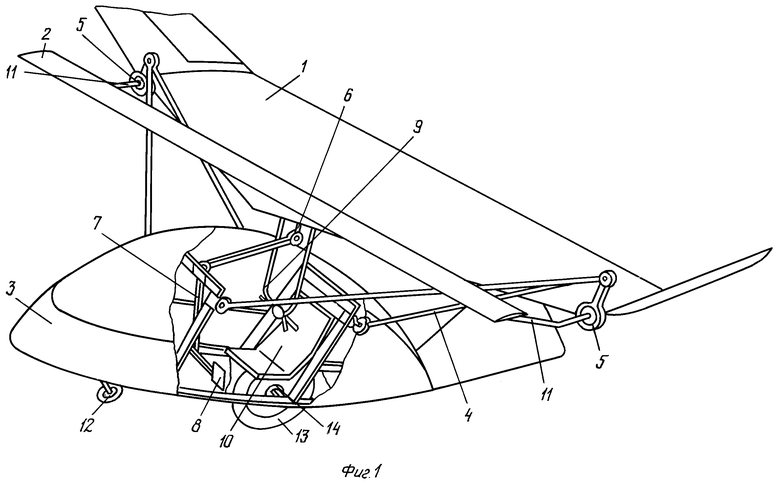
| Летательный аппарат с движителем в виде машущих крыльев | 1988 |
|
SU1785953A1 |
| Мотодельтаплан | 1991 |
|
SU1821422A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАРЯДОВ ЧАСТИЦ ЖИДКОГО ТОПЛИВА | 0 |
|
SU348946A1 |
| US 1846115 A, 27.06.1931. | |||

