ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству управления рекуперативным торможением транспортного средства, которое содержит колеса, которые тормозятся/приводятся в движение посредством мотора, которое способно двигаться посредством мотора, приводящего в движение упомянутые колеса, и которое конфигурируется, чтобы замещать тормозное усилие колес рекуперативным тормозным усилием электромотора.
УРОВЕНЬ ТЕХНИКИ
[0002] Например, как раскрыто в патентном документе 1, торможение транспортного средства может быть обобщено как совместное управление, в котором требуемый целевой тормозной момент получается согласно состоянию вождения, такому как операция отпускания акселератора или операция торможения, и состоянию движения, окружающему транспортное средство, во время движения накатом, в котором педаль акселератора отпускается, или во время операции торможения, при которой педаль акселератора отпускается, а педаль тормоза нажимается, и в котором упомянутый целевой тормозной момент реализуется посредством объединения рекуперативного торможения электромотора системы привода колеса и фрикционного торможения посредством гидравлического тормоза или электромагнитного тормоза.
[0003] Электроэнергия, которая генерируется мотором посредством рекуперативного торможения, заряжается в установленном в транспортном средстве аккумуляторе, который является источником мощности электромотора, и после этого используется для приведения во вращение электромотора.
При совместном управлении, описанном выше, если рекуперативное торможение предпочтительно используется, и если рекуперативное торможение само по себе не может достигать целевого тормозного момента, обычным является применение способа совместного управления, в котором целевой тормозной момент реализуется посредством компенсации нехватки с помощью фрикционного торможения.
[0004] Посредством конфигурирования способом, описанным выше, использование фрикционного торможения может сдерживаться до минимально требуемой величины посредством использования рекуперативного торможения насколько возможно, имеющего максимальное возможное рекуперативное тормозное усилие, определенное по состоянию заряда аккумулятора в качестве верхнего предела, и возможно минимизировать фрикционное торможение, вызывающее потерю кинетической энергии транспортного средства в качестве тепла, в то же время максимизируя величину энергии, восстанавливаемой в аккумулятор, при этом кинетическая энергия транспортного средства преобразуется в электрическую энергию посредством рекуперативного торможения.
В результате, энергоэффективность улучшается, и уровень расхода топлива, также как уровень потребления электричества, может быть улучшен.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0005] Патентный документ 1: Японская выложенная патентная заявка № 1994-153315
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧИ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
[0006] Однако, в традиционном управлении рекуперативным торможением, описанном выше, даже во время заряда посредством рекуперативного торможения, потребление энергии аккумулятора больше величины заряда, так что уровень заряда аккумулятора постепенно уменьшается; в конечном счете, когда достигается состояние истощения электричества, в котором рекуперативное тормозное усилие не может быть сформировано, даже если нагрузка генератора прикладывается к мотору, возникают следующие проблемы.
[0007] Если рекуперативное тормозное усилие больше не формируется вследствие приведения аккумулятора в такое состояние истощения электричества, интенсивность замедления транспортного средства уменьшается на эту величину потери рекуперативного торможения, и поскольку изменение интенсивности замедления транспортного средства отличается от интенсивности замедления в состоянии привода, возникает проблема, при которой водитель испытывает дискомфорт.
[0008] В это время, хотя совместное управление, описанное выше, компенсирует величину потери рекуперативного торможения фрикционным торможением, эта компенсация возникает после потери рекуперативного тормозного усилия вследствие истощения электричества аккумулятора; поэтому, это совместное управление не может решать проблему дискомфорта, описанную выше.
[0009] Кроме того, поскольку интенсивность замедления транспортного средства, которая была уменьшена на величину потери рекуперативного торможения, будет возвращена к первоначальной интенсивности замедления, соответствующей целевому тормозному моменту, когда фрикционное тормозное усилие формируется посредством совместного управления, также возникает проблема, в которой это становится причиной толчка при торможении.
[0010] На основе признания факта того, что проблемы, описанные выше, возникают вследствие того, что рекуперативное тормозное усилие внезапно становится недоступным при входе в состояние заряда аккумулятора, которое создает эти проблемы, целью настоящего изобретения является предоставление устройства управления рекуперативным торможением транспортного средства, которое улучшено так, что проблема, описанная выше, не возникнет, постепенно уменьшая рекуперативное тормозное усилие заблаговременно от предварительно определенного момента времени непосредственно перед входом в упомянутое состояние заряда аккумулятора.
Средство, используемое для решения проблем
[0011] Для того, чтобы добиваться этой цели, устройство управления рекуперативным торможением транспортного средства согласно настоящему изобретению конфигурируется следующим образом.
Сначала, чтобы описать транспортное средство, которое является предпосылкой настоящего изобретения, транспортное средство конфигурируется, чтобы содержать колеса, которые тормозятся/приводятся в движение посредством электромотора, чтобы иметь возможность двигаться посредством электромотора, приводящего в движение упомянутые колеса, и конфигурируется, чтобы замещать тормозное усилие колес рекуперативным тормозным усилием электромотора.
[0012] Настоящее изобретение является таким устройством управления рекуперативным торможением транспортного средства, при этом рекуперативное тормозное усилие конфигурируется, чтобы постепенно уменьшаться в течение предварительно определенного времени непосредственно перед тем, как состояние заряда аккумулятора, который является источником мощности электромотора, уменьшится до уровня, при котором рекуперативное тормозное усилие не может больше формироваться, как запланировано.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0013] В устройстве управления рекуперативным торможением транспортного средства согласно настоящему изобретению, описанном выше, поскольку рекуперативное тормозное усилие постепенно уменьшается заблаговременно в течение предварительно определенного времени непосредственно перед тем, как состояние заряда аккумулятора уменьшится до уровня, при котором рекуперативное тормозное усилие не может больше формироваться, как запланировано, явление, в котором рекуперативное тормозное усилие внезапно становится недостижимым, когда состояние заряда аккумулятора уменьшается до уровня, описанного выше, может быть предотвращено; поэтому, дискомфорт вследствие изменения (уменьшения) интенсивности замедления транспортного средства, вызванного упомянутым явлением потери рекуперативного тормозного усилия, не будет возникать у водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
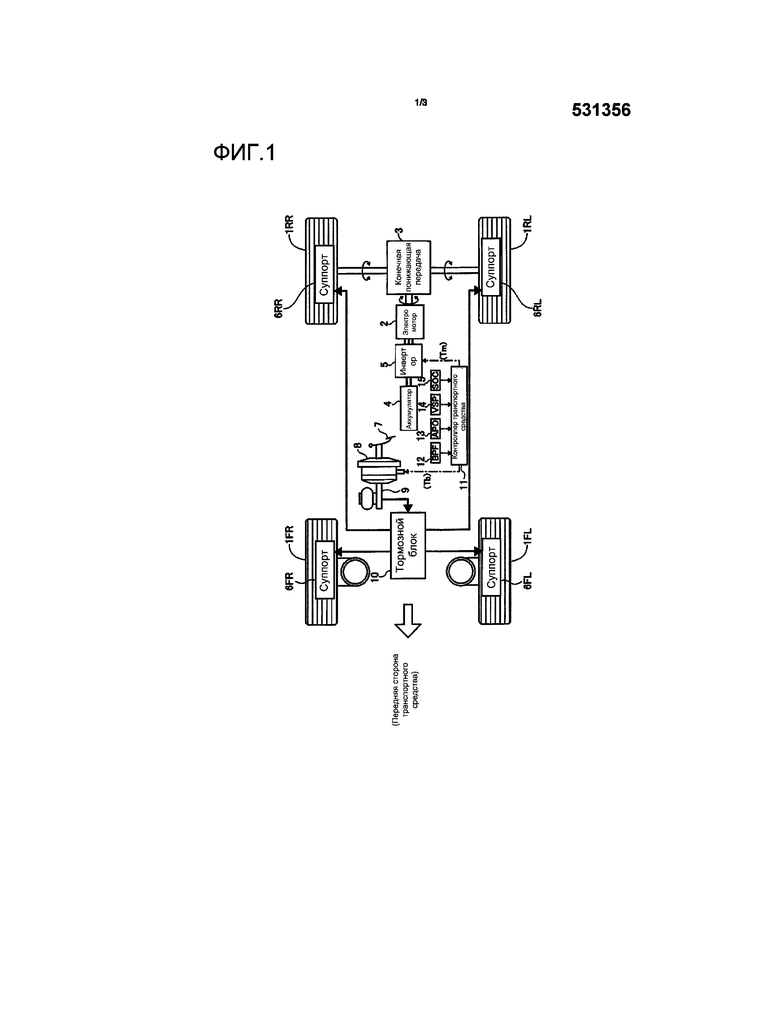
[0014] Фиг. 1 – это схематичный вид системы, иллюстрирующий общую систему управления согласно системе управления тормозным/приводным усилием электрического транспортного средства, оборудованного устройством управления рекуперативным торможением согласно одному варианту осуществления настоящего изобретения.
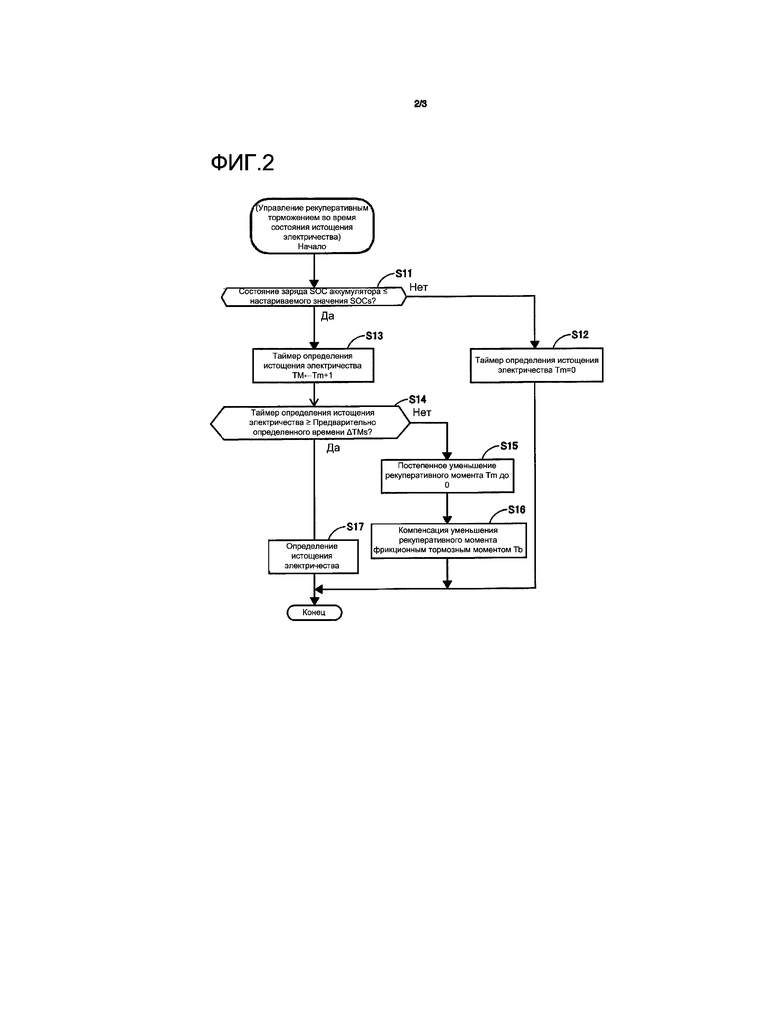
Фиг. 2 – это блок-схема последовательности операций, иллюстрирующая программу управления рекуперативным торможением, которая выполняется посредством контроллера транспортного средства на фиг. 1, когда аккумулятор приводится в состояние истощения электричества.
Фиг. 3 – это временная диаграмма операции управления рекуперативным торможением посредством программы управления на фиг. 2.
СПИСОК НОМЕРОВ ССЫЛОК
[0015] 1FL, 1FR Левое и правое передние колеса
1RL, 1RR Левое и правое задние колеса (затормаживаемые/приводимые электромотором колеса)
2 Электромотор (мотор)
3 Конечная понижающая передача
4 Аккумулятор
5 Инвертер
6FL, 6FR Тормозные суппорты левого и правого передних колес
6RL, 6RR Тормозные суппорты левого и правого задних колес
7 Педаль тормоза
8 Усилитель электрического тормоза
9 Главный цилиндр
10 Тормозной блок
11 Контроллер транспортного средства
12 Датчик силы нажатия педали тормоза
13 Датчик величины открытия положения акселератора
14 Датчик скорости транспортного средства
15 Датчик состояния заряда аккумулятора
Предпочтительные варианты осуществления изобретения
[0016] Варианты осуществления настоящего изобретения будут описаны ниже на основе прилагаемых чертежей.
Первый вариант осуществления
[0017] <КОНФИГУРАЦИЯ>
Фиг. 1 – это схематичный вид системы, иллюстрирующий общую систему управления согласно системе управления тормозным/приводным усилием электрического транспортного средства, оборудованного устройством управления рекуперативным торможением согласно одному варианту осуществления настоящего изобретения.
[0018] Это электрическое транспортное средство содержит левое и правое передние колеса 1FL, 1FR, а также левое и правое задние колеса 1RL, 1RR, и конфигурируется, чтобы двигаться посредством приведения в движение левого и правого задних колес 1RL, 1RR с помощью электромотора 2, и может управляться посредством поворачивания левого и правого передних колес 1FL, 1FR.
Электромотор 2 является приводом, соединенным с левым и правым задними колесами 1RL, 1RR через конечную понижающую передачу 3, содержащую устройство дифференциальной передачи, и должен быть источником мощности, общим для этих левого и правого задних колес 1RL, 1RR.
[0019] Электромотор 2 приводится в действие посредством электрической мощности, предоставляемой аккумулятором 4 через инвертор 5. Инвертор 5 преобразует мощность постоянного тока (DC) аккумулятора 4 в мощность переменного тока (AC), подает мощность переменного тока (AC) электромотору 2 и управляет приводным усилием и направлением вращения электромотора 2, управляя направлением тока и подаваемой мощностью к электромотору 2.
[0020] Электромотор 2 является мотором/генератором, который приспособлен также функционировать в качестве генератора, который обычно приводит как электромотор левое и правое задние колеса 1RL, 1RR, как описано выше, но также приспособлен выполнять рекуперативное торможение этих левого и правого задних колес 1RL, 1RR при предварительно определенной нагрузке генератора во время операции торможения.
Мощность, которую электромотор 2 генерирует во время этого рекуперативного торможения, преобразуется из переменного тока (AC) в постоянный ток (DC) посредством инвертора 5 для заряда аккумулятора 4 и после этого используется для привода электромотора.
С помощью вышеописанного левое и правое задние колеса 1RL, 1RR обычно тормозятся/приводятся в движение электромотором 2 через конечную понижающую передачу 3 для привода или замедления транспортного средства.
[0021] При остановке транспортного средства из состояния движения или при сохранении остановленного состояния цель может достигаться посредством выполнения фрикционного торможения, которое прикладывает тормозящее давление на тормозные диски (не показаны), которые вращаются с левым и правым передними колесами 1FL, 1FR и левым и правым задними колесами 1RL, 1RR, с помощью суппортов 6FL, 6FR, 6RL, 6RR.
[0022] В ответ на силу нажатия педали 7 тормоза, которую водитель нажимает, с помощью усилителя 8 электрического тормоза, главный цилиндр 9 выводит давление тормозной жидкости, соответствующее усилию нажатия педали тормоза под усилением к суппортам 6FL, 6FR, 6RL, 6RR через тормозной блок 10. Блок 10 тормоза прикладывает давление тормозной жидкости от главного цилиндра 9 к суппортам 6FL, 6FR, 6RL, 6RR и выполняет фрикционное торможение транспортного средства (колес 1FL, 1FR, 1RL, 1RR) посредством работы этих суппортов 6FL, 6FR, 6RL, 6RR.
[0023] Электрическое транспортное средство на фиг. 1 оборудуется контроллером 11 транспортного средства для выполнения управления приведением в движение и рекуперативного управления электромотора 2 через инвертор 5, и контроллер 11 транспортного средства дополнительно выполняет управление давлением тормозной жидкости (фрикционным тормозным усилием) через усилитель 8 электрического тормоза для того, чтобы выполнять вышеописанное совместное управление во время рекуперативного управления.
[0024] Соответственно, сигнал от датчика 12 усилия нажатия педали тормоза, который обнаруживает усилие BPF нажатия педали тормоза для педали 7 тормоза, сигнал от датчика 13 величины открытия положения акселератора, который обнаруживает величину APO открытия положения акселератора, сигнал от датчика 14 скорости транспортного средства, который обнаруживает скорость VSP транспортного средства, и сигнал от датчика 15 состояния заряда аккумулятора, который обнаруживает состояние заряда SOC аккумулятора 4, вводятся в контроллер 11 транспортного средства.
[0025] <УПРАВЛЕНИЕ РЕКУПЕРАТИВНЫМ ТОРМОЖЕНИЕМ>
Контроллер 11 транспортного средства получает целевой крутящий момент Tm электромотора (крутящий момент является положительным значением, а рекуперативный момент является отрицательным значением) электромотора 2, относящийся к левому и правому задним колесам 1RL, 1RR, выполняя хорошо известные вычисления на основе введенной информации.
Этот целевой крутящий момент Tm электромотора инструктируется инвертору 5, который управляет приводным/рекуперативным управлением электромотора 2.
Инвертор 5 приводит в движение левое и правое заднее колеса 1RL, 1RR с крутящим моментом Tm электромотора, прикладывая соответствующую DC→AC-преобразованную мощность от аккумулятора 4 к электромотору 2 в ответ на целевой крутящий момент Tm электромотора (крутящий момент с положительным значением) или подвергает левое и правое задние колеса 1RL, 1RR рекуперативному торможению, прикладывая нагрузку генератора, соответствующую целевому крутящему моменту Tm электромотора (рекуперативному моменту с отрицательным значением), к электромотору 2, преобразует мощность, которая генерируется посредством электромотора 2, из AC→DC и заряжает ее в аккумулятор 4.
[0026] Во время рекуперативного торможения, описанного выше, контроллер 11 транспортного средства получает целевое фрикционное тормозное усилие Tb для вышеописанного совместного управления и подает это целевое фрикционное тормозное усилие Tb к электрическому усилителю 8 тормоза в то же самое время. В ответ на целевое фрикционное тормозное усилие Tb, электрический усилитель 8 тормоза задает давление тормозной жидкости из главного цилиндра 9 таким, которое соответствует целевому фрикционному тормозному усилию Tb, задействует суппорты 6FL, 6FR, 6RL, 6RR с этим давлением тормозной жидкости и выполняет фрикционное торможение колес (1FL, 1FR, 1RL, 1RR).
[0027] Вышеописанное является обычным управлением; управление рекуперативным торможением во время состояния истощения электричества, которое является целью настоящего изобретения, будет описано ниже.
При управлении рекуперативным торможением во время состояния истощения электричества аккумулятора, которое является целью настоящего изобретения, в случае настоящего варианта осуществления контроллер 11 транспортного средства выполняет программу управления на фиг. 2 и выполняет управление рекуперативным торможением во время состояния истощения электричества аккумулятора, как иллюстрировано во временной диаграмме на фиг. 3.
[0028] На этапе S11 проверяется, меньше или нет состояние заряда SOC аккумулятора или равно настраиваемому значению SOCs для SOC для определения начала ограничения рекуперации.
Настраиваемое значение SOCs будет описано подробно на основе фиг. 3.
Фиг. 3 является временной диаграммой работы в случае, в котором, в ситуации, в которой состояние заряда SOC аккумулятора постепенно уменьшается, как иллюстрировано, педаль акселератора отпускается в момент времени t1, указанный как "акселератор выключен", и педаль 7 тормоза нажимается в последующий момент времени t2, указанный как "тормоз включен".
[0029] Кроме того, SOCL на фиг. 3 – это предельное значение SOC, с которым рекуперативное тормозное усилие больше не может формироваться, как запланировано; в области низкого SOC, в которой SOC≤SOCL, аккумулятор 4 приходит в состояние истощения электричества, в котором рекуперативное тормозное усилие больше не может формироваться, как запланировано, и эта область обозначается как "область несоздаваемого рекуперативного тормозного усилия" на фиг. 3.
В настоящем изобретении настраиваемое значение SOCs, описанное выше, задается как запланированное состояние заряда аккумулятора для определения момента t3, который является предварительно определенным временем ΔTMs перед моментом времени t6, в который состояние заряда SOC аккумулятора уменьшается до предельного значения SOCL для SOC, с которым рекуперативное тормозное усилие больше не может формироваться, как запланировано.
[0030] Если состояние заряда SOC аккумулятора определяется так, что оно не меньше или равно настраиваемому значению SOCs для определения начала ограничения рекуперации (SOC>SOCs) на этапе S11, управление, которое является целью настоящего изобретения, не должно еще запускаться (время перед моментом времени t3 на фиг. 3); поэтому, таймер TM определения истощения электричества сбрасывается в 0 на этапе S12, и из программы управления на фиг. 2 выполняется выход.
[0031] Если состояние заряда SOC аккумулятора определяется так, что оно меньше или равно настраиваемому значению SOCs для определения начала ограничения рекуперации (SOC≤SOCs) на этапе S11, управление, которое является целью настоящего изобретения, должно быть начато (время достигло момента t3 на фиг. 3); следовательно, управление переходит к этапу S13 и далее. На этапе S13 продолжительность времени, в течение которого (SOC≤SOCs) определяется на этапе S11, т.е., прошедшее время с момента времени t3 на фиг. 3, измеряется посредством приращения (увеличения) таймера TM определения истощения электричества, который был сброшен в 0 на этапе S12.
[0032] На последующем этапе S14 проверяется, равно или нет значение таймера TM определения истощения электричества (прошедшее время с момента времени t3 на фиг. 3, которое является продолжительностью времени состояния SOC≤SOCs) или больше ΔTMs, описанного выше относительно фиг. 3 (достигло или нет время момента времени t6 на фиг. 3).
Если определяется как находящееся между моментами времени, в течение которых TM<ΔTMs на этапе S14 (между моментами времени t3–t6 на фиг. 3), управление переходит к этапу S15 и этапу S16, последовательно; рекуперативный момент Tm (ссылка на фиг. 1) постепенно уменьшается к 0 на этапе S15, и уменьшенная величина рекуперативного момента на этапе S15 компенсируется фрикционным тормозным моментом Tb (ссылка на фиг. 1) на этапе S16.
[0033] Постепенное уменьшение рекуперативного момента T0 к 0 на этапе S15 выполняется следующим образом.
Крутящий момент Tm_Lim ограничения рекуперации, который определяется по состоянию заряда SOC аккумулятора, и т.д., иллюстрируется пунктирной линией вплоть до момента времени t3 на фиг. 3, постепенно уменьшается после момента времени t3, в который (SOC≤SOCs) определяется на фиг. 3, и постепенно уменьшается с градиентом θ изменения времени, с которым Tm_Lim становится 0 точно в момент времени t6, в который определяется (TM=ΔTMs).
[0034] Затем, с момента времени t4 на фиг. 3, в который крутящий момент Tm_Lim ограничения рекуперации, который постепенно уменьшается таким образом, соответствует рекуперативному моменту Tm, величине крутящего момента Tm_c движения накатом и величине тормозного момента Tm_b совместной рекуперации, которые вместе формируют рекуперативный момент Tm, величина тормозного момента Tm_b совместной рекуперации постепенно уменьшается так, чтобы отклоняться вместе с Tm_Lim с градиентом θ изменения времени, и с момента времени t5, в который величина тормозного момента Tm_b совместной рекуперации, таким образом, становится 0, оставшаяся величина крутящего момента Tm_c движения накатом также постепенно уменьшается так, чтобы отклоняться вместе с Tm_Lim с градиентом θ изменения времени, так что рекуперативный момент Tm становится 0 в момент времени t6.
[0035] Вышеописанный градиент θ уменьшения рекуперативного момента Tm (величина тормозного момента Tm_b совместной рекуперации и величина крутящего момента Tm_c движения накатом) определяется по предварительно определенному времени ΔTMs между моментами времени t3–t6 на фиг. 3; это предварительно определенное время ΔTMs предпочтительно задается в минимальное время, требуемое для градиента θ уменьшения рекуперативного момента Tm (величины тормозного момента Tm_b совместной рекуперации и величины крутящего момента Tm_c движения накатом), чтобы не доставлять дискомфорт, описанный выше, водителю.
[0036] На этапе S16 компенсация уменьшенной величины рекуперативного момента на этапе S15 посредством фрикционного тормозного момента Tb выполняется следующим образом. В течение времени, в котором величина тормозного момента Tm_b совместной рекуперации постепенно уменьшается, так, чтобы отклоняться вместе с Tm_Lim с градиентом θ изменения времени между моментами времени t4–t5, фрикционный тормозной момент Tb, который поддерживает объединенный крутящий момент (Tm+Tb) в значении в момент времени t4, компенсируя величину постепенного уменьшения величины крутящего момента Tm_b совместной рекуперации, формируется, как иллюстрируется штрих-двухпунктирной линией на фиг. 3.
[0037] Однако, после момента времени t5, этот фрикционный тормозной момент Tb поддерживается в значении в момент времени t5, как иллюстрировано штрих-двухпунктирной линией на фиг. 3, так, что объединенный крутящий момент (Tm+Tb), таким образом, уменьшается, следуя постепенному уменьшению величины крутящего момента Tm_c движения накатом после момента времени t5 с градиентом θ изменения времени.
[0038] Если определяется на этапе S14 на фиг. 2, что значение таймера TM определения истощения электричества (прошедшее время с момента времени t3 на фиг. 3, которое является продолжительностью времени состояния SOC≤SOCs) равно или больше предварительно определенного времени ΔTMs (время достигло момента времени t6 на фиг. 3), аккумулятор 4 приводится в состояние истощения электричества, и рекуперативное тормозное усилие не может больше формироваться, как запланировано; следовательно, управление переходит к этапу S17, чтобы выполнять определение истощения электричества, после которого из управления на фиг. 2 осуществляется выход.
[0039] ПРЕИМУЩЕСТВА
Согласно управлению рекуперативным торможением вышеописанного варианта осуществления, поскольку рекуперативный тормозной момент Tm конфигурируется, чтобы постепенно уменьшаться заблаговременно в течение предварительно определенного времени ΔTMs непосредственно прежде, чем состояние заряда SOC аккумулятора уменьшается до уровня SOCL (непосредственно перед моментом времени t6 на фиг. 3), при котором рекуперативное тормозное усилие не может больше формироваться, как запланировано, явление, в котором рекуперативный тормозной момент Tm внезапно становится недостижимым, когда состояние заряда SOC аккумулятора уменьшается до уровня SOCL, описанного выше, может быть предотвращено; следовательно, дискомфорт, при котором интенсивность замедления транспортного средства содержит изменение (уменьшение), которое не относится к действию водителя, вызванному этим явлением потери рекуперативного тормозного усилия, может быть предотвращен.
[0040] Кроме того, когда получаются вышеописанные действие и результаты, поскольку крутящий момент Tm_Lim ограничения рекуперации постепенно уменьшается к 0 в течение предварительно определенного времени ΔTMs, описанного выше, с градиентом θ изменения времени, который определяется по этому предварительно определенному времени ΔTMs, от времени, в которое определяется, что состояние заряда SOC аккумулятора стало равно или меньше настраиваемого значения SOCs, которое больше уровня SOCL, описанного выше (этап S11), и рекуперативный тормозной момент Tm конфигурируется, чтобы постепенно уменьшаться вместе с ним, управление постепенным уменьшением рекуперативного тормозного момента Tm, описанное выше, становится возможным посредством просто постепенного уменьшения рекуперативного тормозного момента Tm_Lim, который уже существует в рекуперативном управлении; следовательно, управление постепенным уменьшением рекуперативного тормозного момента Tm становится простым, а также является значительно полезным с точки зрения стоимости.
[0041] Кроме того, поскольку настоящий вариант осуществления конфигурируется, чтобы компенсировать постепенно уменьшающуюся величину рекуперативного тормозного усилия Tm фрикционным тормозным моментом Tb, в то время как рекуперативный тормозной момент Tm постепенно уменьшается, тормозное усилие транспортного средства может поддерживаться постоянным, даже пока рекуперативный тормозной момент Tm постепенно уменьшается, и результаты, описанные выше, могут быть достигнуты без обеспечения дискомфорта, при котором интенсивность замедления транспортного средства изменяется.
[0042] Кроме того, поскольку настоящий вариант осуществления конфигурируется так, что фрикционный тормозной момент Tb для компенсации постепенно уменьшающейся величины рекуперативного тормозного усилия Tm отличается от постепенно уменьшающейся величины рекуперативного тормозного усилия Tm в течение конечного фрагмента постепенного уменьшения рекуперативного тормозного момента Tm (t5–t6 на фиг. 3) и поддерживается в значении в начальное время (t5) конечного фрагмента постепенного уменьшения (t5–t6 на фиг. 3), тормозное усилие транспортного средства будет уменьшаться во время t6 определения истощения электричества, как ясно из изменения в объединенном тормозном моменте (Tm+Tb) между t5–t6 на фиг. 3.
Водитель способен интуитивно знать, что аккумулятор 4 был приведен в состояние истощения электричества от такого уменьшения в тормозном усилии транспортного средства (объединенного тормозного момента Tm+Tb), и способен верно реагировать на состояние истощения электричества аккумулятора.
[0043] Настоящий вариант осуществления конфигурируется, чтобы уведомлять водителя о состоянии истощения электричества аккумулятора 4 посредством уменьшения в объединенном тормозном моменте (Tm+Tb) (уменьшения в тормозном усилии транспортного средства) между t5–t6 на фиг. 3; однако, вместо вышесказанного, фрикционный тормозной момент Tb, с которым увеличивающееся (увеличение в тормозном усилии транспортного средства) изменение объединенного тормозного момента (Tm+Tb) возникает между t5–t6 на фиг. 3, может быть применен в течение конечного фрагмента постепенного уменьшения рекуперативного тормозного момента Tm (t5–t6 на фиг. 3).
[0044] Кроме того, в настоящем варианте осуществления, настоящее изобретение было описано относительно случая, в котором транспортное средство является электрическим транспортным средством, иллюстрированным на фиг. 1; однако, настоящее изобретение не ограничивается таким электрическим транспортным средством и может быть применено к любому транспортному средству, в котором колеса тормозятся/приводятся в движение посредством электромотора, и, конечно, те же действия и результаты могут обнаруживаться в любом транспортном средстве.
Изобретение относится к области устройств управления рекуперацией при торможении. Устройство содержит колеса и мотор, выполненный с возможностью торможения и приведения в движение колес, для перемещения посредством мотора, приводящего в движение колеса и для приложения тормозного усилия к колесам с помощью рекуперативного тормозного усилия мотора. Причем устройство выполнено с возможностью постепенного уменьшения рекуперативного тормозного пути в течение предварительно определенного времени, при котором заряженность аккумулятора, используемого в качестве источника энергии мотора, уменьшится до уровня (SOCL), при котором аккумулятор разряжается, так что рекуперативное тормозное усилие не может больше формироваться от настраиваемого значения заряда, которое больше, чем SOCL. Достигается исключение перегрузки водителя и толчков при торможении. 4 з.п. ф-лы, 3 ил.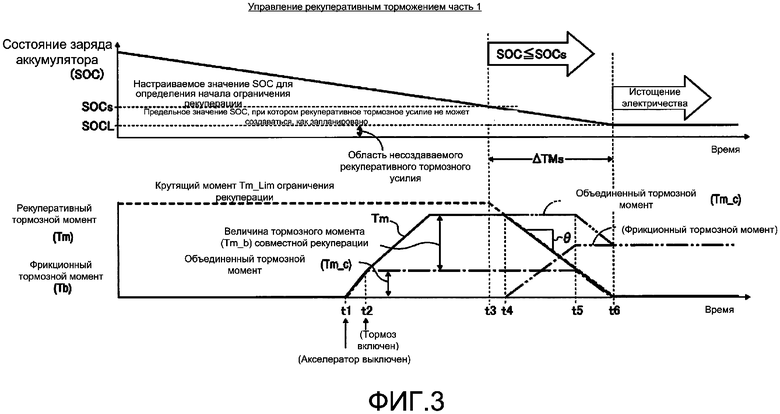
1. Устройство управления рекуперативным торможением транспортного средства (11) для транспортного средства, которое содержит колеса (1FL, 1FR, 1RL, 1RR) и мотор, который выполнен с возможностью торможения и приведения в движение колес (1FL, 1FR, 1RL, 1RR), для перемещения посредством мотора (2), приводящего в движение колеса и для приложения тормозного усилия к колесам (1FL, 1FR, 1RL, 1RR) с помощью рекуперативного тормозного усилия мотора,
причем устройство управления рекуперативным торможением транспортного средства (11) выполнено с возможностью постепенного уменьшения рекуперативного тормозного пути в течение предварительно определенного времени (ΔTMs), при котором заряженность (SOC) аккумулятора (4), используемого в качестве источника энергии мотора (2), уменьшится до уровня (SOCL),
(i) при котором аккумулятор (4) разряжается,
(ii) так что рекуперативное тормозное усилие не может больше формироваться от настраиваемого значения (SOCs) заряда, которое больше, чем SOCL.
2. Устройство (11) управления рекуперативным торможением транспортного средства по п. 1, которое выполнено с возможностью
задавания запланированной зарядки (SOCs) аккумулятора для определения момента (t3) предварительно определенного времени (ΔTMs) перед моментом времени (t6), в который заряд аккумулятора не может больше создавать рекуперативное тормозное усилие, как запланировано, и
постепенного уменьшения рекуперативного тормозного усилия в течение предварительно определенного времени (ΔTMs) от времени (t3), в которое заряд (SOC) аккумулятора уменьшается до запланированного заряда (SOCL) аккумулятора.
3. Устройство (11) управления рекуперативным торможением транспортного средства по п. 1 или 2, выполненное с возможностью
торможения транспортного средства также посредством фрикционного торможения колес (1FL, 1FR, 1RL, 1RR), и
компенсирования постепенно уменьшающейся величины рекуперативного тормозного усилия с помощью фрикционного торможения колес (1FL, 1FR, 1RL, 1RR) во время постепенного уменьшения рекуперативного тормозного усилия.
4. Устройство (11) управления рекуперативным торможением транспортного средства по п. 3, которое выполнено с возможностью задания тормозного усилия колес (1FL, 1FR, 1RL, 1RR) посредством фрикционного торможения в течение конечного фрагмента постепенного уменьшения рекуперативного тормозного усилия, которое должно отличаться от постепенно уменьшающейся величины рекуперативного тормозного усилия, так что тормозное усилие транспортного средства изменяется, после того как предварительно определенное время (ΔTMs) прошло.
5. Устройство (11) управления рекуперативным торможением транспортного средства по п. 4, которое выполнено с возможностью поддержания тормозного усилия колес (1FL, 1FR, 1RL, 1RR) посредством фрикционного торможения в течение конечного фрагмента постепенного уменьшения рекуперативного тормозного усилия в значении в начальное время конечного фрагмента, так что тормозное усилие транспортного средства уменьшается, после того как предварительно определенное время (ΔTMs) прошло.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| JP 2010200557 A, 09.09.2010 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| DE 102011101543 A1, 15.11.2012. | |||

