Область техники, к которой относится изобретение
Настоящее изобретение относится к системе определения количества шагов, способу определения количества шагов и измерителю активности, используемым при точном определении количества шагов в соответствии с характеристиками ходьбы отдельного человека.
Предшествующий уровень техники
Обычно предлагают педометр для определения количества шагов с использованием датчика ускорения. Такой педометр детектирует один шаг по значению локального максимума и значению локального минимума формы колебаний ускорения и подсчитывает количество шагов. Однако возникают случаи, когда количество шагов трудно определить из-за характерных особенностей ходьбы пользователя, например, если человек идет шаркающей походкой, из-за травмы и т.п.
Устройство определения состояния тела и программа в соответствии с публикацией № 2003-290175 не прошедшего экспертизу японского патента (патентный документ 1) позволяют получить измеритель для измерения количества шагов пользователя. В этом документе описано определение режима ходьбы, такого как нормальная ходьба, ускоренный шаг, бег и т.п., по различиям амплитуды и структуры формы колебаний для формы Sw колебания, и стабильное и с высокой точностью определение шага ходьбы пользователя. Хотя различие режима ходьбы можно регистрировать с помощью устройства определения состояния тела в соответствии с патентным документом 1, однако количество шагов отдельного пользователя не может быть точно подсчитано, поскольку амплитуда и структура формы колебаний отдельной формы Sw колебаний сигнала отличаются в зависимости от пользователя.
Сущность изобретения
Задача настоящего изобретения состоит в том, чтобы обеспечить систему определения количества шагов, способ определения количества шагов и измеритель активности, позволяющие точно определять количество шагов в соответствии с характеристиками ходьбы отдельного человека.
В соответствии с аспектом настоящего изобретения, предложена система определения количества шагов, включающая в себя средство получения данных вибрации, полученных путем детектирования вибрации, вызванной движением тела, и средство хранения для хранения данных формы колебаний при ходьбе на основе данных вибрации и данных особенности формы колебаний для различения данных формы колебаний при ходьбе, причем система определения количества шагов содержит: средство расчета для выполнения процесса формирования данных критерия определения, для формирования данных критерия определения количества шагов, пригодных для измерения количества шагов на основе данных вибрации; средство хранения для хранения данных критерия определения количества шагов, рассчитанных средством расчета; и средство управления для управления средством получения данных вибрации, средством хранения и средством расчета, при этом процесс расчета количества шагов, состоящий в расчете количества шагов по данным вибрации путем использования данных критерия определения количества шагов, выполняют с помощью средства управления; и данные критерия определения количества шагов, сохраненные в средстве хранения, обновляют по данным критерия определения количества шагов, рассчитанных средством управления; средство хранения сконфигурировано для хранения данных структуры или структуры данных вибрации при ходьбе; и процесс формирования данных критерия выбора включает в себя получение данных структуры вибрации, которые соответствуют данным структуры, полученным из данных вибрации, и формирование данных критерия определения количества шагов, которые становятся критерием при определении количества шагов, на основе локального максимального значения и локального минимального значения данных структуры вибрации.
Поэтому количество шагов может быть точно определено в соответствии с характеристиками ходьбы отдельного человека.
Поэтому могут быть сформированы данные критерия определения количества шагов, соответствующие характеристикам ходьбы отдельного человека.
В описанном выше аспекте данные критерия определения количества шагов сконфигурированы по верхнему пороговому значению или пороговому значению для определения локального максимального значения, нижнему пороговому значению или пороговому значению для определения локального минимального значения, пороговому значению времени или пороговому значению интервала времени от локального максимального значения до следующего локального максимального значения, или их множества.
Поэтому, когда локальное максимальное значение и/или локальное минимальное значение детектируемых данных формы колебаний при ходьбе превышает верхнее пороговое значение и/или нижнее пороговое значение данных критерия определения количества шагов, сохраненных в средстве сохранения, их можно определить как количество шагов. Кроме того, когда пороговое значение времени от локального максимального значения до следующего локального максимального значения детектируемых данных формы колебаний при ходьбе представляет собой пороговое значение времени данных критерия определения количества шагов, сохраненного в средстве сохранения, их можно определить как количество шагов.
В представленном выше аспекте система дополнительно включает в себя средство отображения для отображения определенной ссылки, в которой принята информация, обозначающая, что количество шагов детектируют на основе данных критерия определения количества шагов, рассчитанных средством управления.
Поэтому можно визуально проверять, что количество шагов детектируется путем использования критерия определения для отдельного индивидуального пользователя.
В соответствии с другим аспектом настоящего изобретения, предложен способ определения количества шагов, включающий в себя средство получения данных вибрации для получения данных вибрации, получаемых путем определения вибрации, вызванной движением тела, и средство сохранения, предназначенное для сохранения данных формы колебаний при ходьбе на основе данных вибрации и данных особенности формы колебаний, для различения данных формы колебаний при ходьбе, способ определения количества шагов, включающий в себя следующие этапы: выполнение с использованием средства расчета процесса формирования данных критерия выбора решения для формирования количества данных критерия решения по количеству шагов, пригодных для измерения количества шагов на основе данных вибрации; хранение в средстве хранения данных критерия выбора количества шагов, рассчитанных средством расчета; выполнение процесса расчета количества шагов, состоящего в расчете количества шагов по данным вибрации, используя данные критерия выбора количества шагов с помощью средства управления для управления средством получения данных вибрации, средством хранения и средством расчета, и обновление данных критерия определения количества шагов, сохраненных в средстве хранения, по данным критерия определения количества шагов, рассчитанных средством управления; средство хранения выполнено с возможностью сохранения данных структуры или структуры данных вибрации при ходьбе; и процесс формирования данных критерия выбора включает в себя: получение данных структуры вибрации, которые соответствуют данным структуры, полученным по данным вибрации, и формирование данных критерия определения количества шагов, которые становятся критерием при принятии определения количества шагов на основе локального максимального значения и локального минимального значения данных структуры вибрации.
Таким образом, количество шагов может быть точно определено в соответствии с характеристиками ходьбы отдельного человека.
Поэтому могут быть сформированы данные критерия определения количества шагов, соответствующие характеристикам ходьбы отдельного человека.
В описанном выше другом аспекте данные критерия определения количества шагов сконфигурированы по верхнему пороговому значению или по пороговому значению для определения локального максимального значения, нижнему пороговому значению или пороговому значению для определения локального минимального значения, пороговому значению времени или пороговому значению интервала времени от локального максимального значения до следующего локального максимального значения, или их множества.
Поэтому, когда локальное максимальное значение и/или локальное минимальное значение детектируемых данных формы колебаний при ходьбе превышает верхнее пороговое значение и/или нижнее пороговое значение данных критерия определения количества шагов, сохраненных в средстве хранения, их можно определить, как количество шагов. Кроме того, когда пороговое значение времени от локального максимального значения до следующего локального максимального значения детектируемых данных формы колебаний при ходьбе представляет собой пороговое значение времени данных критерия определения количества шагов, сохраненных в средстве хранения, их можно определить как количество шагов.
В описанном выше другом аспекте способ дополнительно включает в себя следующие этапы: передачу данных вибрации, полученных средством получения данных вибрации, от измерителя активности, включающего в себя средство получения данных вибрации, в сервер, включающий в себя средство расчета, с помощью средства передачи данных; передачу данных критерия определения количества шагов, рассчитанных средством расчета сервера от сервера в измеритель активности с помощью средства передачи данных; и обновление данных критерия определения количества шагов, сохраненных в измерителе активности, до данных критерия определения количества шагов, рассчитанных в сервере.
Поэтому данные критерия определения количества шагов, сохраненные в измерителе активности, могут быть обновлены в соответствии с характеристиками ходьбы отдельного человека.
В описанном выше другом аспекте способ дополнительно включает в себя этап отображения с помощью средства отображения информации приема конкретной ссылки, обозначающей, что количество шагов детектируют на основе данных критерия определения количества шагов, рассчитанных средством управления.
Поэтому можно визуально проверять, что количество шагов детектируют с использованием критерия определения отдельного индивидуального пользователя.
В соответствии с еще одним другим аспектом настоящего изобретения, предложен измеритель активности, включающий в себя средство получения данных вибрации для получения данных вибрации, полученных в результате определения вибрации, вызванной движением тела, используемого в системе определения количества шагов, причем измеритель активности включает в себя: средство передачи данных для передачи заданных данных вибрации и приема данных критерия определения количества шагов на основе данных вибрации, в котором средство коррекции сконфигурировано для обновления данных критерия определения количества шагов для определения количества шагов по данным критерия определения количества шагов, принятым средством передачи данных, и средство вывода, сконфигурированное для вывода количество шагов, определенных данными критерия определения количества шагов после обновления.
Поэтому количество шагов можно точно определить в соответствии с характеристиками ходьбы отдельного человека.
В соответствии с настоящим изобретением, количество шагов может быть точно определено в соответствии с характеристиками ходьбы отдельного человека.
Краткое описание чертежей
На чертежах:
Фиг.1 изображает вид спереди, представляющий внешний вид педометра.
Фиг.2 изображает блок-схему, представляющую конфигурацию системы для системы получения биологической информации.
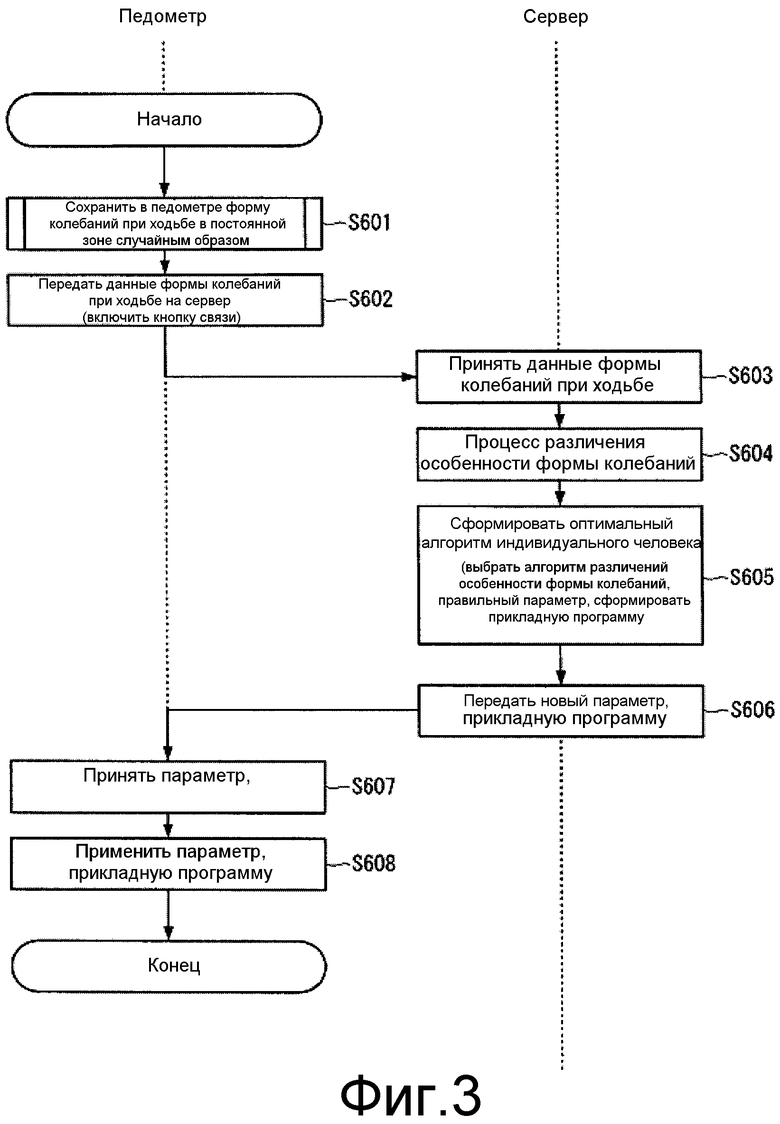
Фиг.3 изображает блок-схему последовательности операций способа измерения количества шагов в примере.
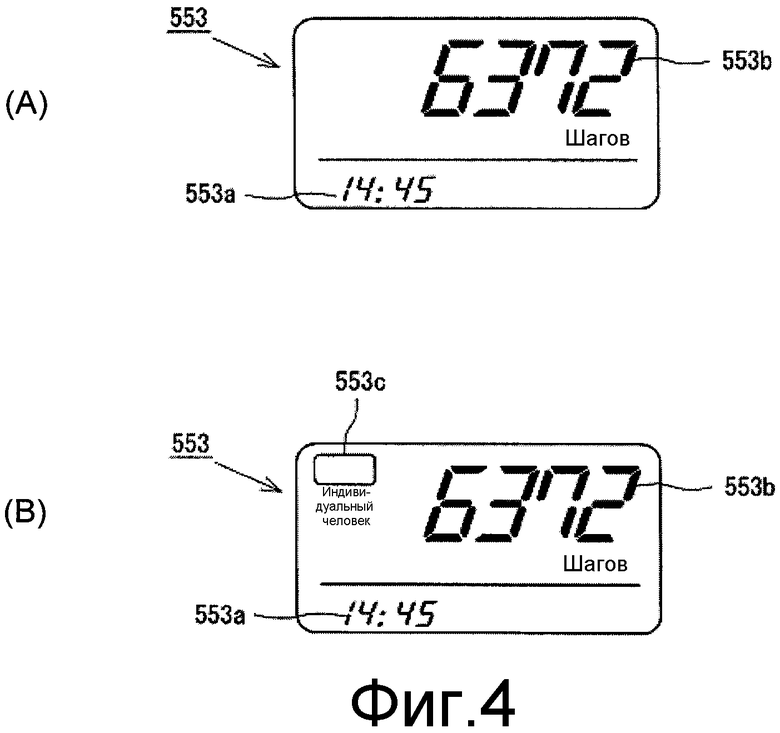
Фиг.4A и 4B изображают виды спереди, представляющие отображаемое содержание модуля дисплея, отображаемое при измерении количества шагов.
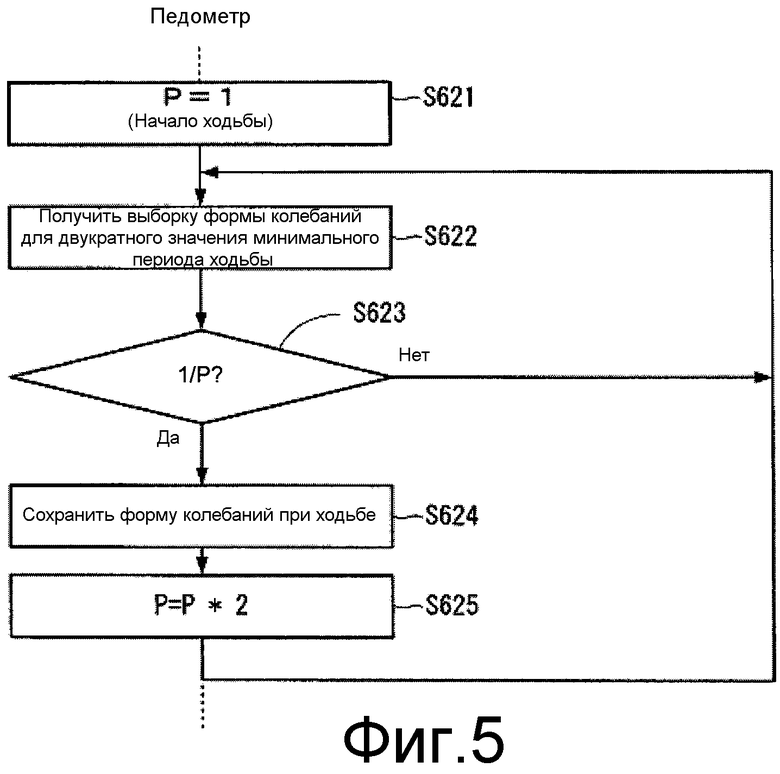
Фиг.5 изображает блок-схему последовательности операций, представляющую операцию по сохранению случайным образом формы колебаний при ходьбе.
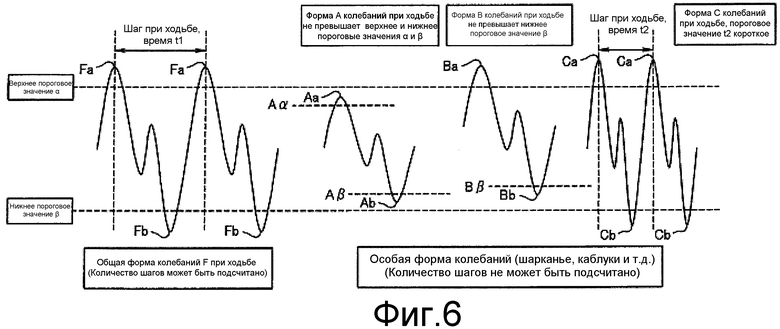
Фиг.6 изображает пояснительный вид общей формы колебаний при ходьбе и характерной формы колебаний при ходьбе.
Подробное описание изобретения
Настоящее изобретение обеспечивает измеритель активности, включающий в себя средство для обновления ссылки для подсчета количества шагов в соответствии со свойствами количества шагов отдельного человека.
Один вариант осуществления настоящего изобретения будет описан ниже со ссылкой на чертежи.
Пример
На фиг.1 показан вид спереди, представляющий внешний вид педометра 505, и на фиг.2 показана блок-схема, представляющая конфигурацию системы для системы получения биологической информации.
Система 500 получения биологической информации сконфигурирована на основе сервера 502 и терминала 504 пользователя, соединенных по проводам или по беспроводному каналу с Интернет 503, и педометра 505, соединенного по проводам или по беспроводному каналу с терминалом 504 пользователя.
Сервер 502 представляет собой соответствующий компьютер, используемый как устройство сервера или тому подобное, и включает в себя модуль 520 управления, модуль 521 хранения, модуль 522 операций, модуль 523 дисплея, модуль 524 связи и т.п.
Модуль 524 связи сконфигурирован на основе соответствующего устройства связи, такого как проводная линия, соединенная с картой LAN (локальная сеть), или беспроводная карта LAN, обеспечивающая беспроводную связь.
Сервер 502 принимает данные от педометра 505 через терминал 504 пользователя и отображает экран с выходными данными на основе таких данных в модуле 523 дисплея, используя операцию, выполняемую сопровождающим лицом с модулем 522 операций.
Терминал 504 пользователя сконфигурирован посредством персонального компьютера или тому подобного и включает в себя модуль 540 управления, модуль 541 связи, модуль 542 операций, модуль 543 дисплея, модуль 544 связи и т.п.
Модуль 541 передачи данных выполнен на основе соответствующего устройства передачи данных, такого как карта LAN, соединенная с проводной линией, или беспроводная карта LAN, соединенная по беспроводному каналу передачи.
Модуль 544 связи сконфигурирован посредством соответствующего интерфейса передачи данных, такого как USB (универсальная последовательная шина), соединенная по проводной линии, или Bluetooth (зарегистрированный товарный знак), соединенный по беспроводному каналу связи.
Терминал 504 пользователя имеет функцию получения данных от педометра 505 через модуль 544 связи и отображения графиков и таблиц на основе таких данных и функцию передачи таких данных в сервер 502.
Терминал 504 пользователя не ограничен персональным компьютером и может быть сконфигурирован посредством соответствующего устройства, например, может быть сконфигурирован посредством портативного устройства обработки информации, включающего в себя PDA (карманный персональный компьютер) и портативный телефон.
Педометр 505 включает в себя модуль 551 связи, модуль 552 определения ускорения, модуль 553 дисплея, модуль 554 расчета, модуль 555 соединения с источником питания, модуль 556 хранения, модуль 557 операций и модуль 558 источника питания. Модуль 553 дисплея и модуль 557 операций расположены на передней поверхности корпуса, как показано на чертеже.
Модуль 551 связи сконфигурирован посредством соответствующего интерфейса связи, такого как USB (универсальная последовательная шина), соединенная по проводной линии, или Bluetooth (зарегистрированный товарный знак), соединенный по беспроводному каналу передачи данных.
Модуль 552 определения ускорения представляет собой датчик для определения ускорения, как пример изменения, которое возникает во время ходьбы и т.д. пользователя, и передает сигнал определения в модуль 554 расчета.
Модуль 552 определения ускорения может быть сконфигурирован посредством одномерного датчика ускорения для определения ускорения в одном направлении, двумерного датчика ускорения для определения ускорения в двух направлениях, ортогональных друг другу, или трехмерного датчика ускорения для определения в трех направлениях, ортогональных друг другу, где трехмерное измерение, позволяющее получить большое количество информации, является наиболее предпочтительным.
Модуль 553 дисплея сконфигурирован посредством устройства дисплея, такого как жидкокристаллический дисплей, и отображает информацию в соответствии с сигналом управления дисплеем из модуля 554 расчета. Информация для отображения может представлять собой информацию, относящуюся к ходьбе, такую как количество шагов.
Модуль 554 расчета работает при подаче питания, принимаемого из модуля 558 питания через модуль 555 соединения с источником питания, и выполняет прием (определение) сигнала определения из модуля 552 определения ускорения и модуля 557 операций, и источника питания и управления операциями (управления отображением) в отношении модуля 551 связи, модуля 553 дисплея и модуля 556 хранения. Модуль 554 расчета также выполняет процесс расчета со ссылкой на данные критерия определения ходьбы и т.д., сохраненные в модуле 556 хранения на основе сигнала определения, принимаемого из модуля 552 определения ускорения.
Модуль 556 хранения хранит программу подсчета количества шагов для определения участка сигнала, полученного при ходьбе, в сигнале определения и путем подсчета количества шагов, пороговых данных для подсчета количества шагов и т.п.
Модуль 557 операций принимает соответствующую входную операцию, такую как входная операция, представляющая информацию пользователя, включающую в себя вес и ширину шага, входную операцию даты и времени для установки часов, операцию переключения содержания отображения для переключения содержания отображения на различные элементы содержания, включающие в себя количество шагов, расходуемые калории и пройденное расстояние, и операцию передачи данных, состоящую в передаче данных в терминал 504 пользователя, который передает сигнал входной операции в модуль 554 расчета.
На фиг.3 показана блок-схема последовательности операций, представляющая операцию, в которой модуль 554 расчета педометра 505 и модуль 520 управления сервера 502 измеряют количество шагов пользователя.
Модуль 554 расчета измеряет форму колебаний при ходьбе в постоянной зоне педометром 505 и сохраняет ее случайным образом (этап S601). Детали такого случайного сохранения будут описаны ниже.
Модуль 554 расчета передает формы колебаний при ходьбе, сохраненные случайно, в сервер 502 (этап S602). В этом случае, пользователь переводит кнопку связи в положение ВКЛЮЧЕНО, выполняя операции с модулем 557 операций, таким образом, что данные формы колебаний при ходьбе передаются.
Модуль 520 управления сервера 502 принимает данные формы колебаний при ходьбе (этап S603) и выполняют процесс различения особенности формы колебаний (этап S604).
Процесс различения особенности формы колебаний определяет особенность на основе множества алгоритмов особенности формы колебаний, зарегистрированных в базе данных (модуль 556 сохранения сервера 502) (см. фиг.6).
В частности, выполняется распознавание структуры для множества особых форм колебаний, зарегистрированных в базе данных (модуль 556 хранения сервера 502), для различения, являются ли особые формы колебаний похожими (имеют ли они некоторую степень соответствия или определенную степень соответствия, или выше).
Модуль 520 управления выполняет формирование алгоритма индивидуального оптимума (этап S605). В этом случае, модуль 520 управления выполняет коррекцию параметра и предоставляет программу исправления (программу обновления).
В частности, при описании, как показано на фиг.6, когда измеряют количество шагов обычного пользователя, локальное максимальное значение Fa и локальное минимальное значение Fb измеренных общих данных F формы колебаний при обычной ходьбе превышают верхнее пороговое значение α и нижнее пороговое значение β для данных критерия определения количества шагов, сохраненных в модуле 556 хранения. Количество шагов, таким образом, будет правильно подсчитано.
Однако, в отличие от обычной ходьбы, локальное максимальное значение Aa и локальное минимальное значение Ab измеренных данных A формы колебаний при ходьбе может не превышать верхнее пороговое значение α и нижнее пороговое значение β, сохраненные в модуле 556 хранения, когда измеряют количество шагов пользователя, выполняющего ходьбу, которая становится особой формой колебаний, такой как ходьба с шарканьем, ходьба на каблуках и т.п. Количество шагов тогда определяется неправильно.
Данные формы колебаний при ходьбе, сохраненные в педометре 505, таким образом, передают в сервер 502, и форму колебаний при ходьбе получают в результате распознавания структуры в модуле 520 управления. Рассчитывают значение, несколько меньшее, чем локальное максимальное значение Aa данных А формы колебаний при ходьбе для этой ходьбы, и такое значение сохраняют как верхнее пороговое значение Aa для определения локального максимального значения Aa. Значение, немного выше, чем локальное минимальное значение Ab волновых данных A при ходьбе, вычисляют, и такое значение содержится в модуле 521 хранения как нижний адресный байт порогового значения для того, чтобы определять локальное минимальное значение Ab.
Локальное максимальное значение Aa и локальное минимальное значение Ab могут быть получены посредством заданного вычисления, такого как умножение на 0,9 среднего значения локального максимального значения Aa и локального минимального значения Ab.
Сервер 502 передает данные критерия определения количества шагов, включающие в себя верхнее пороговое значение Aα и нижнее пороговое значение Aβ, сформированные модулем 520 управления, в педометр 505.
Модуль 554 расчета педометра 505 принимает данные критерия определения количества шагов индивидуального пользователя, переданные из сервера 502, и сохраняет принятые данные критерия определения количества шагов в модуле 556 хранения как данные критерия определения количества шагов, для подсчета количества шагов индивидуального пользователя.
Локальное максимальное значение Aa и локальное минимальное значение Ab данных А формы колебаний при ходьбе при измерении посредством педометра 505, таким образом, превышают верхнее пороговое значение Aα и нижнее пороговое значение Aβ данных критерия определения количества шагов, сохраненных в модуле 556 хранения, таким образом, что количество шагов индивидуального пользователя может быть надежно подсчитано.
Кроме того, когда измеряют количество шагов пользователя, занимающегося ходьбой, с другими особыми формами колебаний, и локальное максимальное значение Ba измеренных данных В формы волны при ходьбе превышает верхнее пороговое значение α для определения локального максимального значение Ba, сохраненного в модуле 556 хранения, но локальное минимальное значение Bb соответствующих данных В формы колебаний при ходьбе не превышает нижнее пороговое значение β, для определения локального минимального значения Bb, сохраненного в модуле 556 хранения, количество шагов подсчитывают неправильно.
Когда измеряют количество шагов обычного пользователя, время t2 шага при ходьбе от локального максимального значения Fa измеренных данных F формы колебаний при ходьбе до следующего локального максимального значения Fa записывают в пределах заданного диапазона времени t1 шага при ходьбе от локального максимального значения Fa общих данных F формы колебаний при ходьбе, сохраненных в модуле 556 хранения, до следующего локального максимального значения Fa, и, таким образом, подсчитывают как количество шагов.
Однако, когда измеряют количество шагов пользователя с коротким шагом, который выполняет ходьбу с другими особыми формами колебаний, время t2 шага при ходьбе от локального максимального значения Ca измеренных данных С формы колебаний при ходьбе до следующего локального максимального значения Ca не будет находиться в пределах заданного диапазона времени t1 шага при ходьбе, если оно будет короче или дольше, чем время t1 шага при ходьбе от локального максимального значения Fa до следующего локального минимального значения Fb для обычных данных F формы колебаний при ходьбе, сохраненных в модуле 556 хранения и, таким образом, не будет подсчитано как количество шагов.
Данные С формы колебаний при ходьбе, сохраненные в педометре 505, затем передают на сервер 502, время t2 шага при ходьбе от локального максимального значения Ca данных С формы колебаний при ходьбе до локального максимального значения Ca подсчитывают в модуле 520 управления, и такое время t2 шага при ходьбе сохраняют в модуле 521 хранения, как данные критерия определения количества шагов для определения интервала шага при ходьбе.
После этого данные критерия определения количества шагов, сформированные в модуле 520 управления, передают в педометр 505 как параметр и прикладную программу.
Коррекция параметра обеспечивает регистрацию в базе данных значения параметра алгоритма особенности формы колебаний (различаемой как имеющую высокую степень соответствия на этапе S604).
В качестве альтернативы, параметр корректируют для отдельных лиц по данным формы колебаний при ходьбе и значениям параметра алгоритма особенности формы колебаний из базы данных. В этом случае, оценка соответствующего параметра может быть получена с использованием таких способов, как оценка максимальной вероятности.
Положение прикладной программы может обеспечить алгоритм для определения конкретной особенности формы колебаний. Например, может быть представлена другая идея, чем принята в текущем педометре.
Эта другая идея может добавлять новое пороговое значение (параметр) в алгоритм или уменьшить одну часть текущего порогового значения, для того чтобы специализироваться в различении особенности формы колебаний.
Модуль 520 управления передает новый параметр и прикладную программу в педометр 505 (этап S606).
Модуль 554 расчета в педометре 505 принимает параметр и прикладную программу (этап S607), применяет принятый параметр и прикладную программу (этап S608) и заканчивает обработку.
Количество шагов, таким образом, может быть впоследствии подсчитано на основе принятого параметра и прикладной программы.
В частности, время 553a, во время измерения количества шагов 553b пользователя, отображается в модуле 553 дисплея педометра 505 при измерении количества шагов обычного пользователя, как показано на фиг.4A. Однако, когда применяются параметр и прикладная программа, соответствующие характеристикам ходьбы индивидуального пользователя, знак или индивидуум 553c, обозначающий, что используются данные обновления, установленные для данного индивидуума, дополнительно отображается в модуле 553 дисплея педометра 505.
При этом можно визуально проверять, что измеренное количество шагов индивидуального пользователя основано на обновленных данных этого отдельного лица.
На фиг.5 показана блок-схема последовательности операций, представляющая работу модуля 554 расчета педометра 505 для случайного сохранения формы колебаний при ходьбе.
Модуль 554 расчета подставляет 1 вместо переменной P в начале ходьбы (этап S621) и делает выборки в форме колебаний два раза за минимальный период ходьбы (этап S622).
Модуль 554 расчета определяет, следует или нет сохранить данные выборки при вероятности 1/P (этап S623), и не сохраняет форму колебаний при ходьбе, если она не соответствует вероятности 1/P (этап S623: Нет), и возвращает обработку на этап S622.
Если в соответствии с вероятностью 1/P (этап S623: Да) модуль 554 расчета сохраняет форму колебаний при ходьбе (этап S624), он подставляет значение, в котором переменная P умножена на 2 (этап S625), и возвращает обработку на этап S622 и повторяет процессы.
Как описано выше, педометр 505 включает в себя средство связи (модуль 551 связи) для передачи заданных данных вибрации (данные ускорения, сохраненные случайным образом) и приема данных критерия определения количества шагов (параметр и прикладная программа), основанных на данных вибрации, где средство коррекции (модуль 554 расчета для выполнения этапа S608) имеет конфигурацию для обновления данных критерия определения количества шагов для определения количества шагов для данных критерия определения количества шагов, принятых средством связи, и средство вывода (модуль 553 дисплея) имеет конфигурацию для вывода количества шагов, определенных по данным критерия определения количества шагов после обновления, таким образом, что алгоритм, соответствующий для индивидуального пользователя, может быть загружен для подсчета количества шагов.
Когда выполняют передачу заданных данных вибрации в случайные моменты времени, объем памяти педометра 505 не требуется значительно увеличивать, количество передаваемых данных может быть уменьшено, и оптимальный алгоритм может быть эффективно выбран.
В системе 500 получения биологической информации сервер 502 включает в себя средство связи (модуль 551 передачи данных) для связи с педометром 505, средство хранения (модуль 521 хранения) для хранения множества типов данных 521b особенности формы колебаний и средство управления (модуль 520 управления) для выполнения различных типов управления, где средство управления выполняет процесс приема данных вибрации (этап S603) для приема данных вибрации из педометра 505 с помощью средства передачи данных, процесс сопоставления структур (этап S604) для сопоставления структур, для проверки, к каким данным 521b особенности формы колебаний близки принятые данные вибрации, и процесс формирования данных критерия определения (этап S605) для формирования новых данных критерия определения в соответствии с данными 521a структуры, полученными путем сопоставления, для автоматического создания алгоритма (параметр, прикладная программа), соответствующего свойствам пользователя.
Случайность поддерживается полностью, поскольку, следует ли сохранить или нет, определяется только по значению вероятности. Таким образом, все формы колебаний при ходьбе сохранять не требуется, и количество данных для сохранения может быть уменьшено.
Емкость памяти может быть сэкономлена, поскольку данные формы колебаний, которые должны быть сохранены, сохраняют в пропорции, соответствующей особенностям ходьбы пользователя. Другими словами, пропорция ходьбы в особой форме колебаний изменяется в зависимости от пользователя, такого как пользователь, который, в основном, ходит с нормальной формой колебаний и иногда ходит с особой формой колебаний, или пользователь, который всегда ходит с особой формой колебаний, изначально шаркая ногами.
И напротив, данные формы колебаний обновляют путем случайного сохранения, таким образом, что обновление иногда выполняют для пользователя, у которого иногда появляется особая форма колебаний, и обновление часто выполняют для пользователя, у которого нормальная форма колебаний и особая форма колебаний часто взаимно меняют друг друга.
В соответствии с конфигурацией настоящего изобретения и описанным выше вариантом осуществления,
система определения количества шагов в соответствии с настоящим изобретением соответствует системе 500 получения биологической информации в соответствии с примером, и аналогично
средство получения данных вибрации, средство формирования данных критерия определения и средство расчетов соответствуют модулю 554 расчета,
измеритель активности соответствует педометру 505,
средство управления соответствует модулю 520 управления,
средство связи соответствует модулям 524, 551 связи,
средство вывода и средство дисплея соответствуют модулю 553 дисплея,
информация приема конкретной ссылки соответствует отдельному человеку 553с,
средство хранения соответствует модулям 521, 556 хранения, и
данные структуры вибрации соответствуют данным A формы колебаний при ходьбе и данным B формы колебаний при ходьбе, но
настоящее изобретение не ограничивается только конфигурацией описанного выше варианта осуществления и может быть получено большое количество вариантов осуществления.
Например, множество примеров, описанных выше, могут быть соединены через Интернет 503. Для педометра 505, таким образом, может быть налажено соответствующее взаимодействие.
Педометр 505 может быть сконфигурирован с возможностью функционального расширения путем загрузки соответствующего параметра, порогового значения, алгоритма или тому подобного из сервера 502. В этом случае программное обеспечение может быть обновлено на новую версию с использованием аппаратных средств в том виде, как есть, или оно может быть легко оптимизировано пользователем самостоятельно.
Расширение функции педометра 505 может быть сконфигурировано для выполнения из терминала 504 пользователя без использования сервера 502. В этом случае, может быть принята конфигурация загрузки параметра, порогового значения, алгоритма и т.п. с носителя записи, такого как CD-ROM.
Педометр 505 может соединять такие устройства для обмена данными непосредственно по беспроводному соединению или по кабелю. В этом случае также данные могут быть взаимно переданы и приняты для улучшения точности каждого из них.
Промышленная применимость
Настоящее изобретение можно использовать в устройстве для определения движений тела и подсчета количества шагов, таком как педометр и измеритель активности.
ОПИСАНИЕ СИМВОЛОВ
500 система получения биологической информации
502 сервер
505 педометр
520 модуль управления
521, 556 модуль хранения
524, 551 модуль связи
552 модуль определения ускорения
523, 553 модуль дисплея
554 модуль расчета
522, 557 модуль операций

Изобретение состоит в предоставлении системы определения количества шагов, способа определения количества шагов и педометра, способных точно определять количество шагов в соответствии с характеристиками ходьбы отдельного человека. Технический результат заключается в повышении точности подсчета количества шагов. Для этого данные вибрации, полученные средством получения данных вибрации (модуль 554 расчета) педометра 505, передают из педометра 505 в сервер 502 с помощью средства связи (модуль 524, 551 связи), и данные критерия определения количества шагов, пригодные для измерения количества шагов, рассчитывают с помощью средства расчета (модуль 520 управления) сервера 502 на основе данных вибрации. Данные критерия определения количества шагов, рассчитанные в сервере 502, передают из сервера 502 в педометр 505 и данные критерия определения количества шагов, сохраненные в педометре 505, обновляют до данных критерия определения количества шагов, рассчитанных сервером 502, для точного подсчета количества шагов в соответствии с характеристиками ходьбы определенного человека. 3 н. и 5 з.п. ф-лы, 6 ил.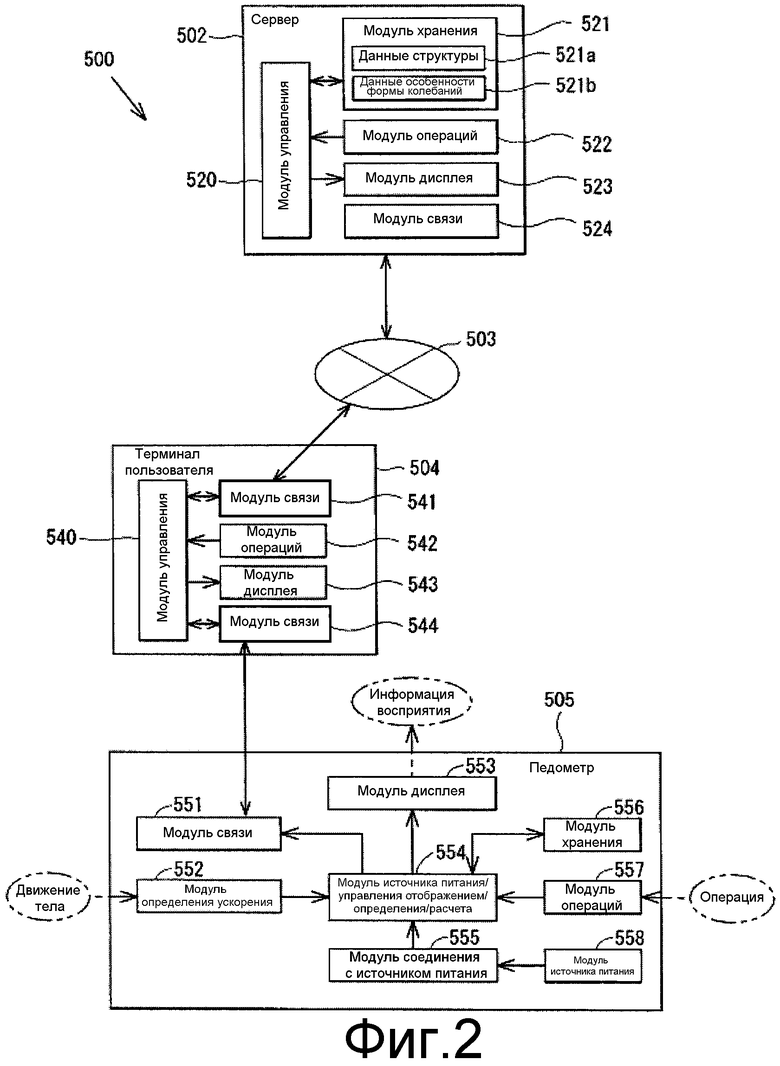
1. Система определения количества шагов, включающая в себя средство получения данных вибрации для получения данных вибрации путем определения вибрации, вызванной движением тела, и средство хранения для хранения данных структуры формы колебаний при ходьбе на основе данных вибрации и данных особенности формы колебаний для различения данных формы колебаний при ходьбе, содержащая:
средство расчета для формирования данных критерия выбора для формирования данных критерия выбора количества шагов, пригодных для измерения количества шагов на основе данных вибрации;
средство хранения для хранения данных критерия выбора количества шагов, рассчитанных средством расчета; и
средство управления для управления средством получения данных вибрации, средством хранения и средством расчета, при этом
средство управления обеспечивает процесс расчета количества шагов, состоящий в расчете количества шагов по данным вибрации, путем использования данных критерия выбора количества шагов;
данные критерия выбора количества шагов, сохраненные в средстве хранения, обновляются до данных критерия выбора количества шагов, рассчитанных средством управления; и
средство хранения сконфигурировано для хранения данных структуры формы колебаний или структуры данных вибрации во время ходьбы; и
процесс формирования данных критерия выбора включает в себя получение данных структуры вибрации, которые соответствуют данным структуры формы колебаний из данных вибрации, и формирование данных критерия выбора количества шагов, которые становятся критерием при выборе количества шагов, на основе локального максимального значения и локального минимального значения данных структуры вибрации.
2. Система по п.1, в которой данные критерия выбора количества шагов сконфигурированы по верхнему пороговому значению или пороговому значению для регистрации локального максимального значения, нижнему пороговому значению или пороговому значению для регистрации локального минимального значения, пороговому значению времени или пороговому значению интервала времени от локального максимального значения до следующего локального максимального значения, или их множества.
3. Система по п.1, дополнительно содержащая средство дисплея для отображения определенной ссылки, в которой принята информация, обозначающая, что количество шагов детектируется на основе данных критерия выбора количества шагов, рассчитанных средством управления.
4. Способ определения количества шагов, включающий в себя получение данных вибрации путем определения вибрации, вызванной движениями тела, средством получения данных вибрации и хранение данных формы колебаний при ходьбе на основе данных вибрации и данных структуры формы колебаний, для различения данных формы колебаний при ходьбе, в средстве хранения, содержащий этапы, на которых:
выполняют процесс формирования данных критерия выбора с использованием средства расчета для формирования данных критерия выбора, пригодных для измерения количества шагов на основе данных вибрации;
сохраняют в средстве хранения данные критерия выбора количества шагов, рассчитанные средством расчета;
выполняют процесс расчета количества шагов, состоящий в расчете количества шагов по данным вибрации, используя данные критерия выбора количества шагов с помощью средства управления для управления средством получения данных вибрации, средством хранения и средством расчета, и
обновляют данные критерия выбора количества шагов, сохраненных в средстве хранения, до данных критерия выбора количества шагов, рассчитанных средством управления; при этом
средство хранения сконфигурировано для хранения данных структуры формы колебаний или структуры данных вибрации при ходьбе; и
процесс формирования данных критерия выбора включает в себя получение данных структуры вибрации, которые соответствуют данным структуры формы колебаний, полученным по данным вибрации, и формирование данных критерия выбора количества шагов, которые становятся критерием выбора количества шагов на основе локального максимального значения и локального минимального значения данных структуры вибрации.
5. Способ по п.4, в котором данные критерия выбора количества шагов сконфигурированы по верхнему пороговому значению или по пороговому значению для определения локального максимального значения, нижнему пороговому значению или пороговому значению для определения локального минимального значения, пороговому значению времени или пороговому значению интервала времени от локального максимального значения до следующего локального максимального значения, или их множества.
6. Способ по п.4, дополнительно содержащий этапы, на которых:
передают данные вибрации, полученные средством получения данных вибрации, от измерителя активности, включающего в себя средство сбора данных вибрации, на сервер, включающий в себя средство расчета, с помощью средства связи;
передают данные критерия выбора количества шагов, рассчитанные средством расчета сервера, от сервера на измеритель активности с помощью средства связи; и
обновляют данные критерия выбора количества шагов, сохраненные в измерителе активности, до данных критерия выбора количества шагов, рассчитанных на сервере.
7. Способ по п.4, дополнительно содержащий этап, на котором отображают с помощью средства отображения информацию приема конкретной ссылки, обозначающей, что количество шагов определяется на основе данных критерия выбора количества шагов, рассчитанных средством управления.
8. Измеритель активности, включающий в себя средство получения данных вибрации, полученных путем определения вибрации, вызванной движением тела, и используемый в системе определения количества шагов по пп.1-3, содержащий:
средство связи для передачи заданных данных вибрации и приема данных критерия выбора количества шагов на основе данных вибрации; при этом
средство коррекции сконфигурировано для обновления данных критерия выбора количества шагов для определения количества шагов до данных критерия выбора количества шагов, принятых средством связи; и
средство вывода сконфигурировано для вывода количества шагов, определенного данными критерия выбора количества шагов после обновления.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Устройство для измерения виброперемещений | 1990 |
|
SU1809295A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

