Изобретение относится к виброизмерительной технике и может быть использовано для измерения вмброперемещений как в виброкалибровочных устройствах, так и при испытаниях конструкций и деталей на моногармоническую вибрацию в машиностроении, самолетостроении, приборостроении.
Целью изобретения является повышение точности измерений.
Сущность изобретения поясняется схемой на фиг. 1; на фиг, 2 а, б, в приведен алгоритм работы устройства.
Устройство содержит скобу 1, выполненную из токопроводящего материала, ус- тановленную на подвижной части 2 вибростенда 3 через изолирующую прокладку 4 рядом с испытываемым объектом 5 (или калибруемым вибродатчиком), зубчато- реечный механизм заключен в корпус б, преобразующий угловые перемещения входной оси 7 в линейные перемещения измерительного стержня 8, имеющего на концах подпружиненные контакты 9. электрически связанные с корпусом механизма. Корпус механизма, при этом жестко связан с неподвижной частью вибростенда 3 и установлен так, чтобы измерительный стержень 8 находился в пространстве между полками скобы 1 и геометрическая ось его .была перпендикулярна поверхностям полох. Крс/ме того, в устройство входят формирователь 10 импульсов контакта, вход которого соединен со скобой 1 и корпусом зубчатс-раечного механизма 6, вырабатывающий электрический сигнал в момент каса- ния подпружиненных контактов поверхностей полок скобы, интегратор 11, вход которого подключен к выходу формирователя импульсов контакта, пороговый элемент 12, вход которого соединен с выходом интегратора, микро-ЭВМ 13, на шину ввода которой подключен выход порогового элемента 12, кодово-ммпульсный преобразователь 14, вход которого соединен с шиной вывода,
Устройство работает следующим образом.
Перед началом испытаний производится измерение разности двух величин - внутреннего размера между полками скобы и длины измерительного стержня 8 между внешними поверхностями контактов 9. Измерение производится в автоматическом режиме при неработающем стенде.
В процессе измерения микро-ЭВМ 13 вырабатывает кодовые сигналы определенной тактовой последовательности, которые преобразуются кодово-импульсным преобразователем 14 в управляющие импульсы, воздействующие на токовые ключи блока
питания 15. Количество токовых ключей равно числу обмоток шагового двигателя 16, Количество разрядов кодовой посылки также соответствует этому числу.
В соответствии с значением кодовой посылки одного такта, открываются соответст- вующие токовые ключи и по обмоткам шагового двигателя, включенным последовательно стоковыми ключами и источником
питания, начинает протекать ток. При этом вал двигателя поворачивается на один угловой шаг. При следующем такте кодовой посылки вал двигателя поворачивается еще на один угловой шаг и т.д. Скорость и направ5 ление дискретного углового перемещения
вала шагового двигателя зависит от значе-.
ния кода посылки и частоты тактовой после, довательности посылок, определяемых
программой микро-ЭВМ. Вместе с валом
0 двигателя дискретно поворачивается и жес-. тко связанная с ним входная ось 7 зубчато- реечного механизма 6. Зубчато-реечный механизм преобразует угловое перемещение входной оси в линейное перемещение
5 измерительного стержня 8. Допустим, от микро-ЭВМ задана последовательность кодовых сигналов, соответствующая перемещению измерительного стержня вниз. 8 момент касания нижнего контакта 9с ниж0 ней полкой скобы 1 замкнется входная цепь формирователя импульсов контакта 10. Электрический сигнал, пройдя интегратор 11 и пороговый элемент 12, Будет принят микро-ЭВМ 13, которая прекратит выдавать
5 кодовые сигналы первоначального значения и начнет вырабатывать кодовые сигналы соответствующие перемещению измерительного стержня вверх по чертежу. При этом программно начнется счет шагов
0 углового перемещения вала шагового двигателя, соответственно, шагов линейного. перемещения измерительного стержня, В момент касания верхнего по чертежу контакта 9с верхней полкой скобы 1, сработает
5 схема формирователя ммпульсов контакта, микро-ЭВМ прекратит счет шагов перемещения и выдаст на вход кодово-им- пульсного преобразователя кодовую последовательность на перемещение изме0 рительного стержня в среднее положение между полками скобы.
Подсчитанное количество шагов линейного перемещения измерительного стержня 8 будет соответствовать искомой
5 разности. Указанную операцию проводят несколько раз с целью статической обработки.получаемых результатов.
После включения вибростенда 3 также производится измерение вышеуказанной разности в аналогичном порядке, но с учетом того, что размер свободного пространства между двумя движущимися полками скобы, в котором перемещается измерительный стержень 8, будет меньше первоначального на размах виброперемещения. При этом касание контактов 9 поверхностей полок скобы 1 будет периодическим, с час-: тотой равной частоте вибропроцесса. Продолжительность контактирования при каждом касании будет зависеть от степени приближения измерительного стержня 8 к поверхности полки и частоты вибропроцесса. Формирователь 10 импульсов контакта из контактных электрических сигналов сформирует импульсы соответствующей длительности и стабильности следования. Интегратор 11 преобразует последовательность импульсов в сигнал постоянного уровня, который сравнивается в пороговом элементе 12 с заранее определенным значением. При равенстве измеренного уровня интегрированных импульсов и эталонного значения на выходе порогового устройства появится сигнал, воспринимаемый микро- ЭВМ 13 как команду на останов шагового двигателя 16 или перемещение его вала в противоположном направлении.
Разность отсчетов в двух случаях измерения (при включенном и выключенном вибростенде) определит величину искомого размаха виброперемещения.
В устройстве скоба 1 выполнена из дюралюминия Д16Т, к внутренним поверхностям полок которой прикреплены стальные полированные пластинки, обеспечивающие необходимые, поверхностные прочность и стабильность электрических свойств полок. Изолирующая прокладка 4 изготовлена из стеклотекетолита. В .качестве зубчато-р.ееч- ного механизма 6 применен индикатор ча- ,сового типа ИЧ-10 с измерительным диапазоном 0-10 мм и ценой деления шкалы 0,01 мм. В устройстве использован шаговый двигатель 1.6 типа ШД-300/ЗОО-А, вал которого жестко связан с осью стрелки часового индикатора, Угловой шаг вала -3°, следовательно один полный оборот вал совершает за 120 шагов. Стрелки часового индикатор за 1 полный оборот проходит 100 делений шкалы, что соответствует 1 мм перемещения измерительного стержня. Исходя из вышесказанного следует, что за 1 шаг углового перемещения вала измерительный стержень перемещается на величину 0,008333.,,мм. Эту величину можно принять за цену деления предлагаемого устройства. При этом размах измеряемых виброперемещений может быть до 10 мм. При использовании часовых индикаторов другого типа (например типа 1 МИГ) или специально изготовленных зубчато-реечных механизмов шаг дискретизации соответственно будет меньше.
Контакты 9 на концах измерительного 5 стержня 8 часового индикатора выполнены подпружиненными во избежание жесткого их касания с поверхностями полок скобы. Формирователь 10 импульсов контакта выполнен по известной схеме на микросхемах
10 серии К176 (см. ж. Радио. № 3, 1989 г. с. 30), интегратор 11 выполнен в виде - цепочки, пороговый элемент собран на микросхеме К554САЗА. В качестве микроЭВМ 13 использован комплекс ДВК-3 с внешним ин5 терфейсом И-2. Кодово-импульсный преобразователь 14 играет роль согласующего звена между микро-ЭВМ 13 и токовыми ключами блока 15 питания и выполнен на микросхемах серии К176. Токовые ключи со0 браны на транзисторах КТ603Б и КТ-801Б по известной схеме (см, ж. Радио № 4, 1977. с. 32э. Источник питания - источник постоянного тока напряжением 24в.
Предлагаемое изобретение в сравне5 нии с известным прототипом обладает следующими преимуществами: во-первых, применение микроЭВМ полностью автоматизирует процесс измерения виброперемещений, что увеличивает произво0 дительность измерений и повышает достоверность получаемых результатов, во- вторых, применение зубчато-реечного меха- низма типа часового индикатора с многооборотной входной осью и большим
5 ходом измерительного стержня позволяет с одинаково высокой точностью измерять как малые, так и большие виброперемещения. Если в прототипе при цене деления шкалы 0,01 мм можно измерять амплитуды
0 виброперемещения до 0,5 мм, то в предлагаемом устройстве при шаге перемещения измерительного стержня равном 0,008333...мм можно измерять амплитуды до 5 мм.
5Фор мула из обретения
Устройство для измерения виброперемещений, содержащее вибростенд с установленными на нем преобразователем и датчиком, отличающееся тем, что, с
0 целью повышения точности измерения и воспроизведения закона виброперемещения, оно снабжено последовательно соеди- ненными формирователем импульсов контакта, интегратором пороговым элемен5 том, микроЭВМ, кодово-импульсным преобразователем, блоком питания шагового двигателя и шаговым двигателем, преобразователь выполнен в виде токопрозодящей- скобы, размещенной одной полкой параллельно подвижной части вибростенда и отделенной от нее изолирующей прокладкой, датчик выполнен в виде размещенных в корпусе измерительного стержня и зубчато-реечного механизма, рейка которого соединена с измерительным стержнем, корпус размещен между полками токопроводя- щей скобы с возможностью осевого перемещения в направлении, перпендикулярном к полкам токопро водя щей скобы, и
электрического контакта с ними посредством подпружиненных электрических контактов, размещенных на концах измерительного стержня, вал шагового двигателя жестко соединен с входной осью зубчато-реечного механизма, выходы формирователя импульсов контакта соединены соответственно с то ко про вод я щей скобой и корпусом датчика.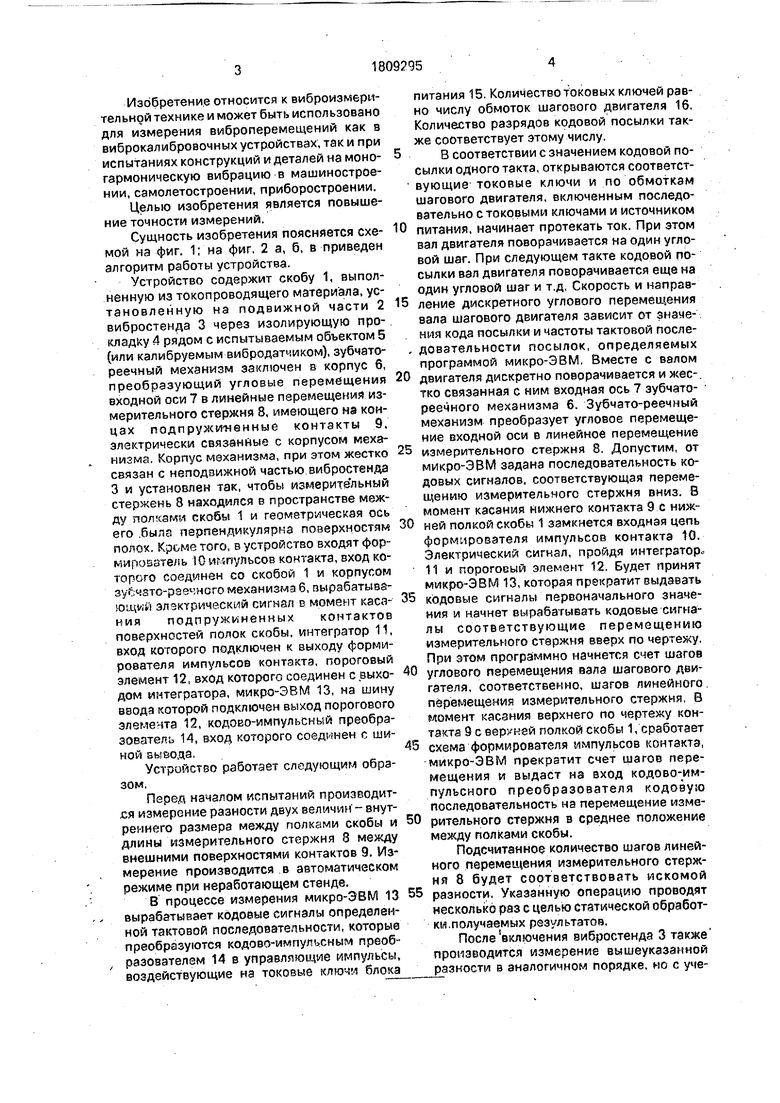

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2087876C1 |
| УЛЬТРАЗВУКОВОЙ ФАЗОВЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА | 2013 |
|
RU2548615C2 |
| УЛЬТРАЗВУКОВОЙ ФАЗОВЫЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2013 |
|
RU2568992C2 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Ультразвуковой фазовый измеритель виброперемещений | 1987 |
|
SU1483251A1 |
| УЛЬТРАЗВУКОВОЙ ФАЗОВЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА | 2016 |
|
RU2667353C2 |
| Устройство контроля качества внесения удобрений центробежным разбрасывателем | 1986 |
|
SU1423028A1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРИОДИЧЕСКИХ МАГНИТНЫХ ПОЛЕЙ И ПОЛУЧЕНИЯ ИХ РАСПРЕДЕЛЕНИЙ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ | 2000 |
|
RU2174235C1 |



Изобретение относится к виброизмерительной технике и может быть использовано для измерения виброперемещений как в виброкалибровочных устройствах, так и при испытаниях конструкций и их элементов на моногармоническую вибрацию. Устройство позволяет повысить точность измерений, а 2 . также достоверность результатов измерений. Преобразователь выполнен в виде скобы 1, прикрепленной к подвижной части 2 вибростенда 3, а датчик содержит корпус 10, измерительный стержень 8 с подпружиненными на концах контактами 9. зубчато-рееч- ный механизм 6, служащий для преобразования углового перемещения оси шагового двигателя 16 в линейные перемещения стержня. Корпус 10 датчика установлен на неподвижной части вибростенда 3 и входит внутрь скобы 1 с тем. чтобы стержень 8, линейно перемещаясь, контактировал с полками скобы 1. Управление работой шагового двигателя 16 и подсчетом шагов перемещения его вала через кодово-импульсный преобразователь 14 и блок 15 питания осуществляет микро-ЭВМ 13, принимающая командные сигналы через интегратор 11 и пороговый элемент 12 от формирователя 10 импульсов контакта, вход которого электри-. чески соединен со скобой 1 и корпусом 10 датчика.2 ил. (Л
( Начало -3
-/
Обнулвнив регистров R1t RZ,R3
Выдача кода „ Вниз на 1шае
(K2)+t - R2
Ф
Г Исходное положение стержня - среднее между полкапи скобы
Выдача на шину Иы9од микроэви кодовой комбинации, caamftemciflfy- ннцеи перемещения измерительного ствржнй 8 сторону нижней полки скобы
4 Подсчет
количесглба шагов
Фиг. 2а
(R3)
Вычисление разности ддих Величин-. Внутр. размера нежду полкани скойы при дым. стенде и/iu свободного пространства при Вмюч. стенде ц длины стержня
-19А
RR
- 20
Вывод на П9чать (RR)
С Коней j
Г-27- ----, I |-. I
Я-----1
У(КК)-(Х) L. I---
Г
29 - J-- Вы8од на . печать (У)
| Виброконтактное измерительное устройство | 1980 |
|
SU947627A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик вибраций | 1985 |
|
SU1265489A1 |
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
| Техническое описание и инструкция по эксплуатации, (прототип) | |||
