Изобретение относится к области бесконтактных оптических измерений и может быть применено в тех отраслях народного хозяйства, где имеется потребность оперативного измерения, фиксации и сравнения поверхностей объектов сложных форм, например в робототехнике (системы технического зрения), машиностроении (включая задачи прототипирования), медицине (ортопедия), архитектуре, скульптуре, дизайне, при конструировании и моделировании одежды.
Под измерением формы поверхности понимается восстановление функции z (x, у), где x, у - координаты точки объекта вдоль некоторой опорной плоскости, а z - расстояние между этой точкой поверхности и опорной плоскостью. Эта же задача в литературе также называется определением (измерением) рельефа поверхности, оконтуриванием поверхности, профилометрией поверхности или топографической съемкой. Под измерением пространственного положения поверхности подразумевается определение абсолютных пространственных координат точек поверхности объекта в пространстве измерительного устройства.
Известно множество способов, в которых световой поток с известным распределением интенсивности (полосы, пятна или решетка) проецируют на объект, форма которого подлежит измерению, а затем исследуют тем или иным образом полученное на поверхности объекта изображение распределения освещенности, деформированное вследствие того, что форма объекта отличается от плоской. Частным их случаем являются способы, в которых изображение объекта, освещаемого через набор полос с синусоидальным профилем, анализируется с использованием методов фазовой модуляции или фазового сдвига. Для получения подобного распределения интенсивности используют выходное поле лазерного интерферометра либо освещение проектором через специально подготовленный слайд.
Известен способ профилометрии поверхности и получения трехмерных контуров поверхности (ЕР N 0182469 B1, G 01 В 11/24), заключающийся в том, что с помощью проекционной системы на объект направляют пучок света, имеющий синусоидальное распределение интенсивности, смещают фазу синусоидальной интенсивности падающего пучка и с помощью детектора (или массива детекторов) получают изображения объекта с измененным распределением фаз для ряда различных смещений фаз падающего пучка. Эти изображения сохраняют и определяют для каждой точки изображения, которым ставятся в соответствие точки поверхности объекта, расстояние от точки поверхности объекта до опорной плоскости путем обработки значений интенсивности этих сохраненных изображений. Процесс обработки включает процедуру определения номера полосы, проецируемой на определенную точку объекта. Номер полосы восстанавливается путем прослеживания следа полосы между упомянутой точкой и опорной плоскостью.
Проекционная система, используемая для реализации этого способа, содержит лазер и интерферометр, снабженный устройством управления фазовым сдвигом. Линейно поляризованный луч, выходящий из лазера, пространственно фильтруется фильтром, состоящим из линзы и щели, затем отсекается призмой Уолластона. Фазовый модулятор включает комбинацию четвертьволновой пластинки и вращающегося поляризатора; посредством вращения последнего смещается фаза синусоидального распределения интенсивности интерференционной картины.
Недостатками этого способа являются
- влияние спекл-структуры изображения объекта, возникающей вследствие когерентного освещения, искажающее результаты определения координат точек поверхности,
- обязательное наличие опорной плоскости в поле зрения,
- невозможность применения этого способа для поверхностей с разрывами, отверстиями и др. вследствие того, что применяемая процедура определения номера полосы требует непрерывности наблюдаемых полос.
Известен способ измерения формы объекта, учитывающий, что его поверхность может иметь разрывы (WO 97/36144, G 01 В 11/24). Способ заключается в том, что на объект проецируют набор полос с синусоидальным распределением интенсивности под некоторым углом к направлению наблюдения, наклон полос изменяют во времени, записывают последовательность изображений, отличающихся сдвигом по фазе, вычисляют из этих изображений трехмерное комплексное распределение интенсивности, из которого далее определяют форму объекта. Разрывы в этом распределении интенсивности, вызванные особенностями измеряемой поверхности, устраняются использованием преобразования Фурье при обработке данных.
К недостаткам этого способа относятся
- необходимость усложнения устройства для реализации способа, чтобы осуществить изменение наклона полос во времени;
- реализация способа затруднена, если присутствуют отверстия и тени в поле зрения;
- т.к. полосы, проецируемые на объект, неотличимы друг от друга, истинное значение координаты z (x, у) определяется лишь с точностью до произвольной константы.
Известен способ определения абсолютных координат объекта (ЕР 0534284 B1, G 01 В 11/24)], заключающийся в том, что на объект проецируют набор параллельных полос, изображение объекта регистрируют при нескольких положениях проецируемого набора полос, различающихся углом поворота этого набора вокруг оптической оси проекционной системы, из полученных изображений вычисляют абсолютные координаты объекта.
Недостатком этого способа является зависимость чувствительности измерений от расположения точки измеряемой поверхности, а именно от расстояния между этой точкой и осью вращения набора полос.
Наиболее близким к изобретению является способ измерения контуров трехмерного объекта с использованием одного набора линий (патент США N 5612786, кл. 356/376), предназначенный для измерения трехмерных координат точек на контурах поверхности объекта. В рамках этого способа помещают объект в поле зрения оптической системы, состоящей из проектора и камеры, проецируют на объект прозрачный слайд с одним набором линий, интенсивность которых меняется по синусоидальному закону, получают предварительное фазовое распределение, содержащее фазы каждой из множества ячеек, находящихся в соответствии с точками объекта, после чего восстанавливают фазы и преобразуют набор восстановленных фаз в набор трехмерных координат упомянутого объекта для каждой из ячеек, используя набор уравнений, содержащий фиксированные калибровочные параметры, значения которых устанавливаются во время предварительной калибровочной процедуры. Процедура восстановления фаз, предназначенная для определения номера полосы, выполняется путем минимизации приращений координат поверхности в соседних точках.
В одном из вариантов этого способа получают как минимум три изображения объекта, причем эти изображения отличаются определенным фазовым сдвигом, который создается перемещением находящегося в проекторе держателя, в котором закреплен упомянутый слайд с набором линий. Для определения абсолютной фазы, а следовательно, абсолютных координат одна линия из этого набора маркируется.
Недостатки этого способа заключаются в том, что только по одной метке в поле зрения можно однозначно пронумеровать все видимые линии на всех точках поверхности, и используемая процедура восстановления фаз накладывает ограничения на множество поверхностей, форму которых можно измерить. Способ не может быть использован для измерения форм поверхностей, не создающих непрерывную систему полос в поле зрения.
Задачей изобретения является измерение форм и пространственного положения видимых сложнопрофильных поверхностей, в том числе имеющих резкие края, отверстия и участки поверхности, не связанные между собой или принадлежащие разным объектам, бесконтактным оптическим способом.
Эта задача решается тем, что поверхность объекта размещают в поле освещения проекционной оптической системы и одновременно в поле зрения устройства для регистрации изображений упомянутой поверхности, с помощью упомянутой проекционной оптической системы проецируют на упомянутую поверхность поочередно как минимум три периодические распределения интенсивности освещенности, представляющие собой набор полос, интенсивность которых меняется по синусоидальному закону, причем упомянутые периодические распределения интенсивности освещенности отличаются сдвигом этого набора полос в направлении, перпендикулярном полосам, на контролируемую величину в пределах полосы, и, кроме того, однократно проецируют дополнительное распределение интенсивности освещенности, позволяющее для каждой точки упомянутой поверхности определить номер полосы из упомянутого набора полос, получают и сохраняют соответствующие изображения упомянутой поверхности, затем обрабатывают все упомянутые изображения для получения как предварительного, так и результирующего фазовых распределений, содержащих фазы, соответствующие точкам поверхности, затем с использованием данных предварительной калибровки из упомянутого результирующего фазового распределения получают абсолютные координаты точек упомянутой поверхности.
Дополнительное распределение интенсивности освещенности задают в форме ступенчатой функции k N, где k - некоторый известный коэффициент, N - номер полосы, или в форме f(ϕ), где ϕ - фаза, f - монотонная непрерывная функция, производная которой не принимает нулевого значения, или же в любой другой форме, позволяющей для каждой точки упомянутой поверхности определить номер полосы из упомянутого набора полос.
В качестве проекционной оптической системы может быть использован слайдопроектор.
Тогда упомянутые периодические распределения интенсивности освещенности создают с помощью одного слайда с периодическим распределением коэффициента поглощения света путем сдвига упомянутого слайда в направлении, перпендикулярном направлению полос на периодическом распределении и перпендикулярном оптической оси проекционной оптической системы.
Упомянутые периодическое и дополнительное распределения интенсивности освещенности могут быть созданы с помощью одного слайда с двумя областями, имеющими соответственно периодическое и дополнительное распределения коэффициента поглощения света, причем упомянутый слайд имеет ширину, достаточную для того, чтобы одновременно проецировалось только одно из упомянутых распределений.
В качестве проекционной оптической системы может быть использована также лазерная проекционная система.
Данный способ позволяет распространить метод фазового сдвига на измерение поверхностей сложной формы, содержащих ступеньки, резкие края, отверстия и участки поверхности, не связанные между собой и принадлежащие разным объектам, при возможности определения абсолютных положений всех участков поверхности. Это достигается за счет использования дополнительного распределения интенсивности освещенности, позволяющего при одновременной обработке всех зарегистрированных изображений получить однозначное абсолютное значение фазы синусоидального распределения для каждой точки поверхности вне связи с другими точками или участками поверхности, что снимает ограничения на сложность формы измеряемых поверхностей.
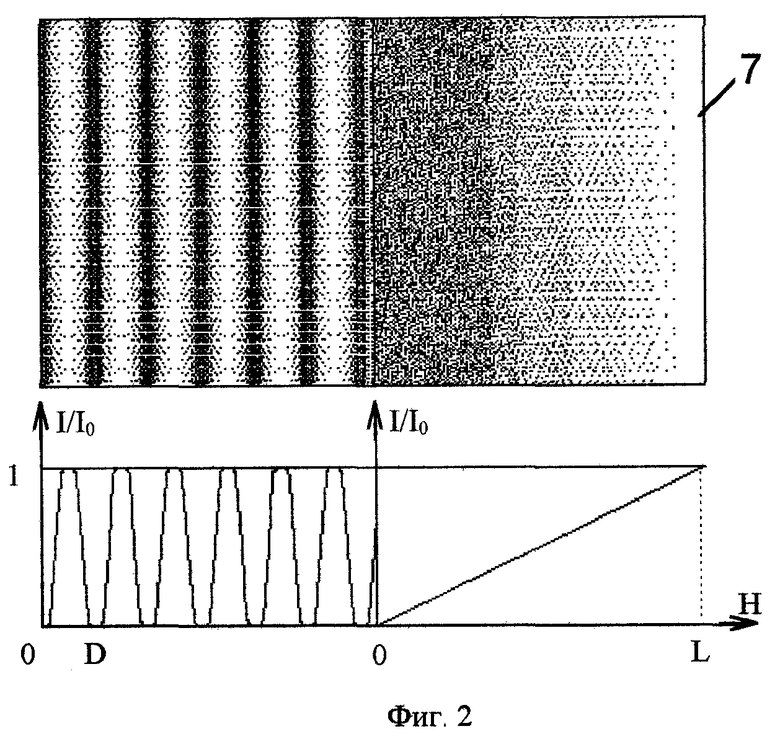
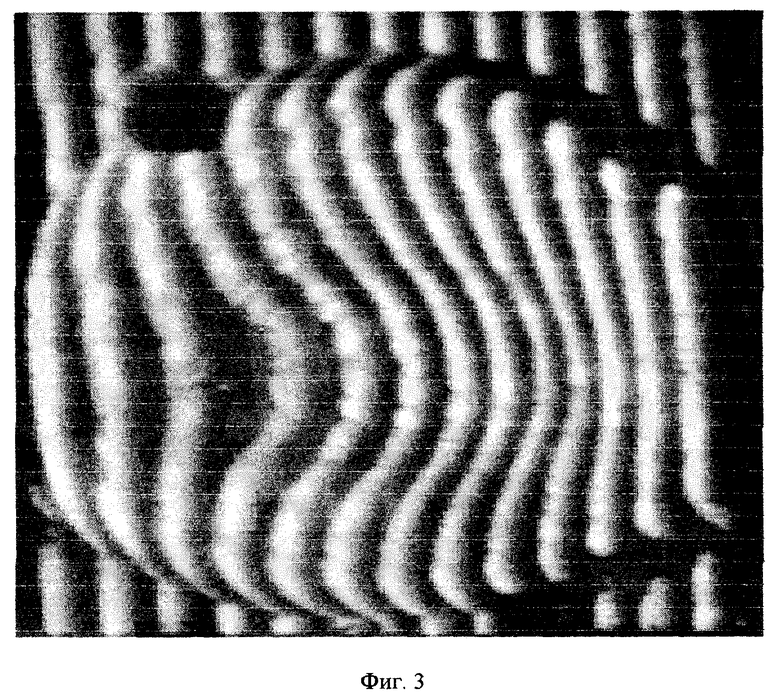
Изобретение поясняется чертежами. На фиг. 1 изображен общий вид устройства, предназначенного для реализации предлагаемого способа. На фиг. 2 показан вариант совмещения на одном слайде двух распределений: периодического и дополнительного. На фиг. 3 показан пример деформации спроецированных на поверхность обмеряемого объекта полос с синусоидальным распределением интенсивности.
Предлагаемый способ может быть реализован с помощью устройства, показанного на фиг. 1. Устройство для измерения формы поверхности объекта 1 состоит из проекционной оптической системы, в качестве которой, например, может быть использован слайдопроектор 2, средства для регистрации изображения поверхности обмеряемого объекта, в качестве которого может быть использована телекамера 3 с ПЗС-матрицей 4, контроллера 5, осуществляющего оцифровку изображений, ЭВМ 6, предназначенной для хранения и обработки изображений и точного управления положением слайда 7 в слайдопроекторе 2. Поверхность объекта 1 должна находиться в поле освещения слайдопроектора 2 и в поле зрения телекамеры 3.
В слайдопроекторе 2 имеются источник света, слайдодержатель, обеспечивающий возможность прецизионного перемещения слайда 7 в направлении, перпендикулярном направлению проходящего света, и объектив.
Слайд 7 представляет собой пропускающую свет пластину, на которой заранее сформировано определенное распределение коэффициента поглощения света. Для реализации способа необходимы два распределения: одно - периодическое с синусоидальным профилем полос, другое - дополнительное - непериодическое, такое, что оно позволяет для каждой точки поверхности объекта 1 определить номер проецируемой на эту точку полосы из первого распределения при совместной обработке изображений поверхности объекта 1, зарегистрированных при проецировании на него этих распределений. Это дополнительное распределение может иметь вид ступенчатой функции с шириной ступеньки, равной периоду первого распределения, или вид монотонной функции, производная которой не принимает нулевых значений, или другой вид, позволяющий определить номер полосы. В описании рассмотрен вариант, когда это распределение имеет вид линейной функции.
Возможны различные варианты исполнения слайдов 7. Например, можно использовать два слайда: один с синусоидальным распределением, другой с дополнительным.
В качестве другого варианта может быть использован один слайд 7 (см. фиг. 2) с двумя областями, имеющими соответственно периодическое и дополнительное распределения коэффициента поглощения света, причем упомянутый слайд имеет ширину, достаточную для того, чтобы одновременно проецировалось только одно из упомянутых распределений.
Систему координат выбирают таким образом, что ось z направлена от объекта 1 к телекамере 3, ось x лежит в плоскости, перпендикулярной направлению синусоидальных полос на слайде 7, ось у перпендикулярна осям z и x. При этом телекамеру 3 путем вращения вокруг оси z можно установить так, что оси x и у будут параллельны краям прямоугольного изображения, регистрируемого телекамерой 3.
Пропускание света слайдом с периодическим распределением можно описать формулой
I(h)/Io= 1/2(1+cos(2πh/D)), (1)
где I (h) - интенсивность света, прошедшего через точку слайда с координатой h вдоль оси х, отсчитываемой от некоторой точки, например края слайда;
I0 - интенсивность света без слайда;
D - период распределения.
В качестве примера дополнительного распределения выберем линейную функцию. Тогда пропускание света таким слайдом можно описать формулой
I(h)/I0 = h/L, (2)
где L - размер слайда в направлении оси x.
Предлагаемый способ осуществляется следующим образом.
Поверхность объекта 1 размещают в поле освещения слайдопроектора 2 и одновременно в поле зрения телекамеры 3.
Объектив слайдопроектора 2 настраивают таким образом, что создаваемое объективом изображение рисунка, находящегося на слайде 7, совмещается с поверхностью объекта 1. При этом устанавливается взаимно однозначное соответствие между точками слайда и точками поверхности объекта 1.
На поверхность объекта 1 с помощью слайдопроектора 2 проецируют периодическое распределение интенсивности освещенности, представляющее собой набор полос, интенсивность которых меняется по синусоидальному закону.
Телекамеру 3 (фиг. 1) направляют на поверхность объекта 1 под некоторым, не равным нулю углом к направлению освещения слайдопроектором 2, что позволяет наблюдать деформированную картину полос (см. фиг. 3). Если поверхность объекта 1 плоская, спроецированные полосы будут образовывать равномерную решетку, аналогичную исходной. В случае объекта произвольной формы произойдет искривление системы полос, тем большее, чем более объект отличается от плоскости и чем больше угол между направлениями освещения и наблюдения.
При этом объектив телекамеры 3 должен быть настроен так, чтобы изображение объекта 1, создаваемое этим объективом, попадало на ПЗС-матрицу 4, то есть между точками поверхности объекта 1 и ячейками ПЗС-матрицы 4 должно быть взаимооднозначное соответствие.
Предполагается также, что расстояния между объектом 1 (фиг. 1) и слайдопроектором 2 и объектом 1 и телекамерой 3 достаточно велики по сравнению с апертурами объективов слайдопроектора 2 и телекамеры 3 и размерами объекта 1, так что в пределах определенной погрешности направления проецирования и наблюдения одинаковы для каждой точки поверхности объекта 1.
С помощью телекамеры 3 получают изображение поверхности объекта 1, оцифровывают с помощью контроллера 5 и сохраняют с помощью ЭВМ 6.
Процедуру проецирования периодического распределения и регистрации соответствующего изображения поверхности объекта 1 повторяют М раз (как минимум три раза), каждый раз сдвигая слайд 7 с этим распределением в направлении, перпендикулярном полосам и направлению проходящего света, на контролируемую величину в пределах полосы. Для облегчения дальнейших вычислений эту величину сдвига следует выбрать постоянной и равной D • (m-1)/ М, где m - номер сдвига, m = 0, 1, 2,.... При проецировании трех периодических распределений величина сдвига составит 1/3 периода.
В предположении, что система оцифровки изображений работает в линейном режиме, то есть цифровой отсчет яркости изображения в соответствующий ячейке матрицы 4 пропорционален освещенности этой ячейки, эти три изображения будут описываться следующими формулами:
S0(nx, ny) = B (nx, ny) + К (nx, ny) • 1/2 (1 + cos (2 π h (nx, ny) / D)),
S1 (nx, ny) = В (nx, ny) + K(nx, ny) • 1/2 (1 + cos (2 π h(nx ny)/D + 2 π/3)),
S2 (nx, ny) = В (nx, ny) + K(nx, ny) • 1/2 (1 + cos (2 π h(nx, ny)/D + 4π/3)), (3)
где S0, S1, S2 - яркость изображения в ячейке с координатами (nx, ny);
К - коэффициент пропорциональности, учитывающий долю света, пришедшего в ячейку матрицы 4 после рассеяния от точки поверхности объекта 1, чувствительность ячейки к свету, усиление электрического сигнала и коэффициент при аналого-цифровом преобразовании;
В - вклад в яркость изображения в той же ячейке, обусловленный фоновым освещением (кроме слайдопроектора 2).
Далее на поверхность объекта 1 с помощью слайдопроектора 2 однократно проецируют дополнительное распределение интенсивности освещенности, позволяющее для каждой точки упомянутой поверхности определить номер полосы из упомянутого набора полос, и аналогично получают и сохраняют дополнительное изображение этой поверхности.
Это изображение в случае линейного распределения, описанного формулой (2), будет описываться следующей формулой:
SL (nx, ny) = В (nx, ny) + К (nx, ny) • h (nx, ny) / L. (4)
Полученные изображения (3) и (4) обрабатывают для получения предварительного и результирующего фазовых распределений, содержащих фазы, соответствующие точкам поверхности. Предварительное фазовое распределение содержит фазы в пределах полосы синусоидального распределения, т.е. они не превышают 2π. Результирующее фазовое распределение содержит фазы относительно некоторой начальной точки, например, соответствующей краю слайда, проецируемого на объект 1.
Обработку производят следующим образом. Систему уравнений (3) решают для каждой ячейки изображения относительно В, К и h, однако, т.к. h находится под знаком функции cos, его можно найти лишь с точностью до постоянной типа 2 π N, где N - целое число. Обозначим как h* значение h, находящееся в интервале 0 < h* < D. Так получают предварительное фазовое распределение h* (nx, ny).
Результирующее фазовое распределение связано с предварительным фазовым распределением формулой
h(nx, ny) = h*(nx, ny) + N (nx, ny) • D (5)
N определяется из оценки истинного значения h** величины h, получаемой из уравнения (4) при подстановке В и К, найденных из решения системы уравнений (3):
h**(nx, ny) = (SL(nx, ny) - B(nx, ny)) • L/K(nx, ny). (6)
Из (5) и (6) получают N(nx, ny), округляя до целого результат вычислений по формуле
N(nx, ny) = (h**(nx, ny) - h (nx, ny)) / D. (7)
Результирующее фазовое распределение находят подстановкой округленного до целого значения N(nx, ny), найденного по формуле (7), в формулу (5).
Оценочное значение h** (nx, ny), полученное из (6), нецелесообразно принимать за окончательное, т. к. параметр L (длина слайда вдоль оси х), находящийся в знаменателе, весьма велик, и соответственно точность измерений низка. Отдельное определение дробной и целой части фазы h (nx, ny) позволяет сохранить точность измерений.
Далее из упомянутого результирующего фазового распределения получают абсолютные координаты точек поверхности объекта 1 с использованием данных предварительной калибровки.
При калибровке устанавливают связь между координатами x, у, z точек объекта, номерами ячеек изображения, в которые эти точки попадают, и полными фазами периодического распределения h в этих точках. В упрощенном случае бесконечно удаленных от объекта 1 слайдопроектора 2 и телекамеры 3 эта связь устанавливается зависимостями
x=nx k1,
y = ny k2,
z=nxk3 + nyk4 + h(nx, ny)k5. (8)
Параметры k1 - k5 определяют при измерениях на тестовом объекте.
Т.к. оптические параметры системы одинаковы при измерениях и калибровке, соотношения (8) используют для получения абсолютных координат точек поверхности объекта 1.
Изобретение относится к бесконтактным оптическим измерениям и может быть применено в робототехнике, машиностроении, медицине, архитектуре. На поверхность проецируют набор полос с синусоидальным распределением интенсивности, сдвигая его несколько раз, и одно дополнительное распределение интенсивности освещенности, регистрируют соответствующие изображения поверхности, из которых определяют полные фазы синусоидального распределения для каждой точки поверхности, независимо, с использованием данных предварительной калибровки находят абсолютные координаты точек поверхности. Дополнительное распределение может быть задано в форме ступенчатой функции с шириной ступеньки, равной расстоянию между полосами, или в форме монотонной функции или любой другой форме, позволяющей для каждой точки поверхности определить номер полосы из набора. Изобретение позволяет расширить диапазон измеряемых объектов. Изобретение позволяет измерять сложные формы поверхностей, имеющие резкие края, отверстия и разрывы. 6 з.п.ф-лы. 3 ил.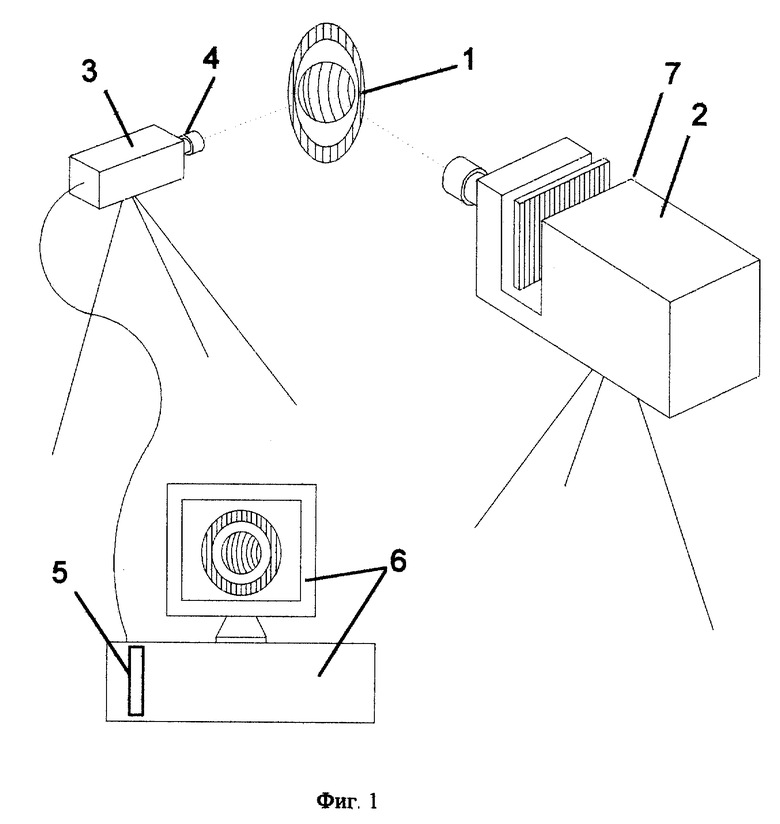
| US 5612786 A, 18.03.97 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| УСТАНОВКА ДЛЯ ОБРАЗОВАНИЯ ПОКРЫТИЯ НА ВНУТРЕННЕЙ ПОВЕРХНОСТИ ЦИЛИНДРИЧЕСКОГОИЗДЕЛИЯ | 0 |
|
SU182469A1 |
| Способ определения рельефа объекта, перемещаемого конвейером | 1991 |
|
SU1803726A1 |

