Изобретение относится к способу управления рельсовым транспортным средством, содержащим двойную приводную установку, при этом каждая приводная установка содержит двигатель внутреннего сгорания, а также передаточный блок, в котором на основании отклонения между заданным и действительным значением приводного момента и предсказуемого вида привода с помощью устройства управления тягой определяют заданный вид привода в смысле одинарного или двойного привода, заданную рабочую точку, а также заданную ступень передачи для передаточных блоков.
В рельсовом транспортном средстве с двойной приводной установкой заданный приводной момент задается с помощью управляющего рычага, который (момент) затем с помощью устройства управления поездом передается в качестве заданного значения для двигателя внутреннего сгорания в шину передачи данных, например, шину CAN. На основании параллельного управления обеспечивается, что каждый двигатель внутреннего сгорания в рамках обычных допусков создает приблизительно одинаковую приводную мощность. Обычно в двойной приводной установке двигатели внутреннего сгорания выполнены для максимального ускорения рельсового транспортного средства. Во время процесса ускорения двигатели внутреннего сгорания работают на кривой полной нагрузки характеристик двигателя. После достижения максимально допустимой скорости транспортного средства необходима лишь та приводная мощность, которая необходима для сохранения установившегося режима. Поэтому в установившемся режиме рабочие точки двигателей внутреннего сгорания лежат в диапазоне характеристик двигателя со значительно более высоким удельным расходом топлива. Недостатком является то, что, несмотря на меньшую отдаваемую мощность, устанавливается повышенный расход топлива.
Одна мера улучшения известна из DE 1455052 OS, в котором показаны двойная приводная установка и способ управления для рельсового транспортного средства. Двойная приводная установка состоит из главного и вспомогательного дизельного двигателя, коробки передач, генератора, электрического регулятора, а также электродвигателя. Главный дизельный двигатель приводит в действие генератор, который в свою очередь через вал соединен с коробкой передач. Вспомогательный дизельный двигатель также соединен с коробкой передач. На выходном валу коробки передач расположен электродвигатель в качестве дополнительного привода. Генератор, электрический регулятор и электродвигатель образуют дизель-электрический приводной тракт. В первом рабочем состоянии, которое соответствует остановке рельсового транспортного средства, включен главный дизельный двигатель, в то время как вспомогательный дизельный двигатель и коробка передач выключены. Создаваемый генератором ток применяется исключительно для предварительного отопления поезда и для снабжения других потребителей тока. Во втором рабочем состоянии, которое соответствует низкой потребности в приводной мощности, включены главный дизельный двигатель и коробка передач, в то время как вспомогательный дизельный двигатель остается выключенным. Главный дизельный двигатель приводит в движение в своем нижнем и среднем диапазоне скорости вращения через коробку передач пары ведущих колес. Для улучшения коэффициента полезного действия двигателя, часть мощности двигателя передается параллельно через электрическое приводное соединение, а именно, через генератор, регулятор и электродвигатель, в пары ведущих колес. В третьем рабочем состоянии, которое соответствует большей потребности в мощности, главный дизельный двигатель и вспомогательный дизельный двигатель являются общим источником привода в верхнем диапазоне скорости вращения вплоть до максимальной скорости вращения. В данном случае часть мощности главного дизельного двигателя передается в пары ведущих колес по электрическому пути, с целью обеспечения работы главного дизельного двигателя в диапазоне благоприятного расхода топлива.
Другая мера известна из DE 814604 PS, в котором показана двойная приводная установка с двумя идентичными трансмиссиями. Каждая приводная установка содержит дизельный двигатель и передаточную систему в виде генератора и электрических осевых двигателей для привода колесных пар. Оба генератора на стороне выхода механически соединены через сцепления с редуктором, который в свою очередь приводит в действие вспомогательные машины. Вспомогательные машины являются, например, вентиляторами для радиаторов, тормозными компрессорами и генераторами для создания напряжения в бортовой сети. Отличительным признаком является то, что обязательно необходимые для работы вспомогательные машины предназначены для выборочного сцепления с одним или другим устанавливаемым на постоянную общую мощность двигателем, за счет чего, предусмотренный для привода рельсового транспортного средства, двигатель внутреннего сгорания работает в диапазоне благоприятного расхода топлива, в то время как другой двигатель внутреннего сгорания приводит в действие вспомогательные машины.
Хотя обе указанные меры приводят к уменьшенному расходу топлива, однако при этом не исчерпываются все возможности экономии топлива. Поэтому в основу изобретения положена задача создания способа управления рельсовым транспортным средством с двойной приводной установкой, который обеспечивает дальнейшую экономию топлива.
Эта задача решена, согласно изобретению, с помощью способа с признаками пункта 1 формулы изобретения. Варианты выполнения приведены в зависимых пунктах формулы изобретения.
Способ управления двойной приводной установкой состоит в том, что из заданного приводного момента, который задается в качестве желаемой мощности с помощью рычага управления и действительного приводного момента рельсового транспортного средства сначала вычисляют отклонения приводного момента. Затем на основании отклонения приводного момента и прогнозируемого вида привода задают с помощью устройства управления тягой заданный вид привода в смысле одинарного или двойного привода, заданную рабочую точку для соответствующего двигателя внутреннего сгорания, а также заданную передаточную ступень для передаточного блока. Под передаточными блоками в смысле изобретения понимается блок из генератора и электродвигателя в качестве дизель-электрического привода, автоматизированная коробка передач для переключения под нагрузкой или гидродинамическая передача. Центральной идеей изобретения является установка в установившемся режиме для предусмотренного для движения двигателя внутреннего сгорания рабочей точки вблизи кривой полной нагрузки, а для другого двигателя внутреннего сгорания - рабочей точки вблизи скорости вращения холостого хода, при этом учет прогнозируемого вида работы существенно способствует экономии топлива. Поэтому снижается стоимость работы для пользователя.
Прогнозируемый вид работы определяется перед началом поездки тем, что электронный график пути считывается в устройство управления поездом и заранее задаются относящиеся к отрезкам пути прогнозируемые виды привода рельсового транспортного средства. Затем во время рабочего движения задается прогнозируемый вид работы тем, что определяют отклонение действительного положения относительно определяемого из электронного графика движения на участке заданного положения рельсового транспортного средства, вычисляют на основе отклонения положения резерв времени и в зависимости от резерва времени предлагается сохранение или смена прогнозируемого вида привода. Так, например, при отрицательном резерве времени в смысле опоздания предлагается прогнозируемый вид привода с повышенной отдачей мощности.
В одном варианте выполнения предусмотрено, что при задании заданного вида привода и заданной рабочей точки решающим образом учитывается измеренная в течение рабочего времени совокупная нагрузка. Для совокупной нагрузки строится, например, график действительного приводного момента или скорости вращения двигателя в заданной рабочей точке с помощью записывающего устройства профиля нагрузки. Следовательно, с помощью совокупной нагрузки достигается равномерная нагрузка двигателей внутреннего сгорания, что приводит, в свою очередь, к одинаковым интервалам технического обслуживания. При задании заданного вида привода учитываются также уровни заполнения горючего двигателя, например, топлива, охлаждающего средства, масла и жидкости SCR.
На фигурах показан предпочтительный пример выполнения, при этом на фигурах изображено:
фиг.1 - схема системы;
фиг.2 - блок-схема устройства управления тягой;
фиг.3 - поле характеристик двигателя;
фиг.4 - блок-схема программы и
фиг.5 - подпрограмма UP1.
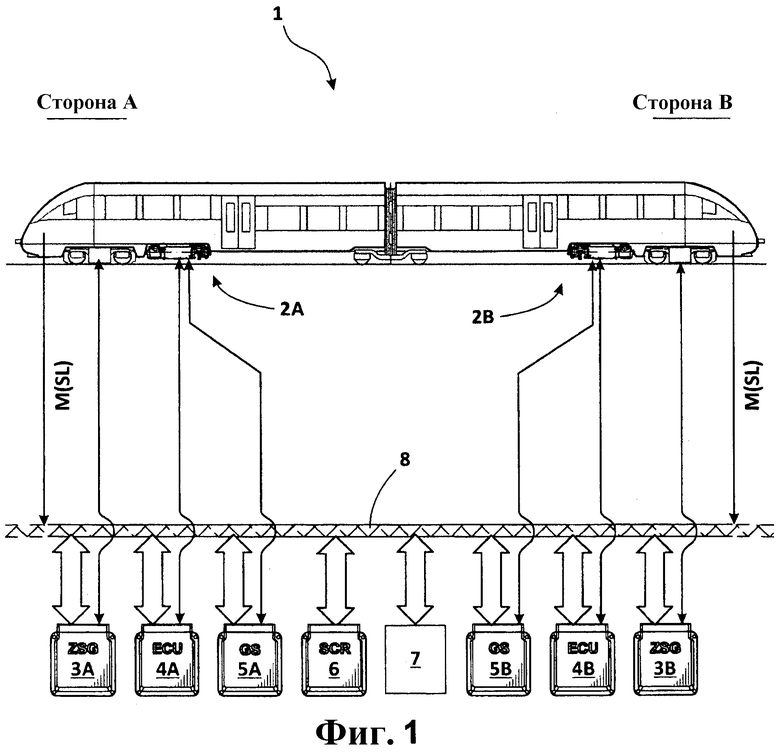
На фиг.1 показана схема системы рельсового транспортного средства 1, в данном случае моторного вагона, с двойной приводной установкой. Однако изобретение можно использовать также при больше чем двух приводных установках. Рельсовое транспортное средство 1 имеет сторону А и сторону В. В соответствии с этим, на чертеже и в тексте компоненты стороны А обозначены с добавлением А, а компоненты стороны В - с добавлением В. Каждая приводная установка, например, приводная установка 2А, состоит из двигателя внутреннего сгорания и передаточного блока для передачи приводного момента от двигателя внутреннего сгорания на ведущие колеса. Под передаточным блоком в смысле изобретения понимается блок из генератора и электродвигателя для дизель-электрического привода, автоматизированная коробка передач, переключаемая под нагрузкой, или гидродинамическая передача. Приводные установки 2А и 2В выполнены симметрично и идентично с двигателями внутреннего сгорания с одинаковой отдаваемой мощностью.
К общей электронной шине 8 передачи данных, например, системе шин CAN или Ethernet, подключены электронные управляющее устройства. Для части рельсового транспортного средства на стороне А это устройство 3А управления поездом (ZSG), устройство 4А управления двигателем (ECU) и устройство 5А управления коробкой передач (GS). Дополнительно подключено управляющее устройство 6 (SCR) для задания отработавших газов. Подключенные к шине 8 передачи данных управляющие устройства 3-6 являются как приемниками, так и передатчиками. Также к шине 8 передачи данных подключен приемный блок 7 для приема дорожной радиорелейной связи и данных GPS. Через дорожную радиорелейную связь в шину 8 передачи данных подается электронный график движения на участке с прилагаемой электронной картой участка. Данные GPS содержат действительное положение и фактическую высоту. Задание заданного значения заданного приводного момента M(SL) осуществляется водителем моторного вагона с помощью рычага управления. Приемный блок 7 и рычаг управления для задания заданного приводного момента M(SL) являются исключительно передатчиками относительно шины 8 передачи данных.
Типовые условия при работе рельсового транспортного средства задаются электронным графиком движения на участке, который, как известно, считывается перед началом поездки через радиорелейную связь в устройство управления составом. В электронном графике движения на участке содержаться относящиеся к отрезкам пути скорости и тем самым временные рамки между двумя точками пути. Перед началом поездки задаются прогнозируемые, относящиеся к отрезкам пути виды привода рельсового транспортного средства с помощью электронного графика движения на участке. В дальнейшем тексте они называются прогнозируемыми видами привода. Затем во время движения определяют отклонение действительного положения от определяемого из электронного графика движения на участке заданного положения рельсового транспортного средства. Из отклонения положения вычисляют в свою очередь резерв времени. Затем на основании резерва времени предлагается либо сохранение прогнозируемого вида привода, т.е. фактической приводной мощности, либо изменение прогнозируемого вида привода, т.е. к более высокой или более низкой приводной мощности. На другом этапе, согласно изобретению, предусмотрено, что вычисляют отклонение между заданным и действительным приводным моментом и в зависимости от этого отклонения приводного момента, а также прогнозируемого вида привода задают с помощью устройства управления тягой заданный вид привода в смысле одинарного или двойного привода, заданную рабочую точку для двигателей внутреннего сгорания, а также заданную ступень передачи для передаточных блоков.
На фиг.2 показана блок-схема устройства 9 управления тягой, при этом отдельные блоки представляют части выполняемой программы. Входными величинами являются заданный приводной момент M(SL), действительный приводной момент M(IST), заданное положение POS(SL), действительное положение POS(IST), электронный график движения на участке SPL, первая входная величина Е1 и вторая входная величина Е2. Выходными величинами являются заданный вид AA(SL) привода, заданная рабочая точка BP(SL) для двигателей внутреннего сгорания и заданная ступень US(SL) передачи для передаточного блока, например, автоматизированной переключаемой под нагрузкой коробки передач. Управляющие сигналы поступают в шину передачи данных и преобразуются в соответствующем управляющем устройстве в соответствующие регулировочные сигналы. Например, в двигателе внутреннего сгорания с общей топливной системой это сигнал PWM для управления дросселем всасывания и управляющий сигнал для инжекторов (начало впрыска и конец впрыска). Внутри устройства 9 управления тягой содержаться в качестве функциональных блоков рабочая стратегия 10 и верификация 11. Рабочая стратегия 10 содержит в свою очередь функциональный блок 12 и прогнозирование 13. Верификация 11 содержит выбор 14 и совокупную нагрузку 15.
Внутри рабочей стратегии 10 прогнозирование 13 определяет перед началом поездки, относящиеся к отрезкам участка прогнозируемые виды ААР привода на основании электронного графика SPL движения на участке. Затем во время движения с помощью прогнозирования 13 вычисляется прогнозируемый вид ААР привода в зависимости от отклонения действительного положения POS(IST) от определяемого из электронного графика SPL движения на участке заданного положения POS(SL) рельсового транспортного средства. В функциональном блоке 12 из заданного приводного момента M(SL) и действительного приводного момента M(IST) определяется отклонение приводного момента. Затем на основании рекомендуемого прогнозируемого вида ААР привода, который характеризует рекомендуемую приводную мощность, и отклонения приводного момента определяют вид АА привода. Дополнительно к этому, учитывается первая входная величина Е1, которая характеризует состояние всей системы. Внутри верификации 11 выбор 14 на основании вида АА привода, совокупной нагрузки LK и второй входной величины Е2 определяет заданный вид AA(SL) привода в смысле одинарного или двойного привода, заданную рабочую точку BP(SL) для двигателя внутреннего сгорания на стороне А и стороне В, а также заданную ступень US(SL) передачи для передаточных блоков. С помощью совокупной нагрузки 14 заданный вид AA(SL) привода и заданная рабочая точка BP(SL) записываются в регистраторе профиля нагрузки. С помощью профиля нагрузки 14 достигается, что при верификации заданных значений приводные установки равномерно нагружаются в рабочий промежуток времени. Под входной величиной Е2 понимается уровень заполнения бака SCR и запас топлива.
Во время фазы ускорения рельсового транспортного средства устройство 9 управления тягой выдает в качестве заданного вида AA(SL) привода двойной привод и в качестве заданной рабочей точки BP(SL) значение кривой полной нагрузки. При применении автоматизированной переключаемой под нагрузкой коробки передач устройство 9 управления тягой выдает в качестве заданной ступени US(SL) передачи значение AUTO, что означает, что электронное устройство управления коробкой передач (5А, 5В на фиг.1) определяет самостоятельно ступень передачи, например, в зависимости от выходной скорости вращения коробки передач. При применении гидродинамической передачи устройство 9 управления тягой задает передачу. В установившемся режиме работы рельсового транспортного средства, т.е. при постоянной скорости, устройство 9 управления тягой задает в качестве заданного вида AA(SL) привода одинарный привод. В качестве заданной рабочей точки BP(SL) задается, например, для двигателя внутреннего сгорания на стороне А, значение на кривой полной нагрузки, в то время как в качестве рабочей точки для двигателя внутреннего сгорания на стороне В используется либо холостой ход, либо выключение. При применении автоматизированной переключаемой под нагрузкой коробки передач устройство 9 управления тягой задает в качестве заданной ступени US(SL) передачи для переключаемой под нагрузкой коробки передач на стороне А значение AUTO и для переключаемой под нагрузкой коробки передач на стороне В - нейтральное значение. В процессе торможения рельсового транспортного средства устройство 9 управления тягой задает в качестве заданного вида AA(SL) привода двойной привод и в качестве заданной рабочей точки BP(SL) неизменное значение. При применении автоматизированной переключаемой под нагрузкой коробки передач устройство 9 управления тягой задает в качестве заданной ступени передачи значение AUTO. В вокзале устройство 9 управления тягой задает в качестве заданного вида AA(SL) привода одинарный привод. В соответствии с этим, заданной рабочей точкой BP(SL), например, для двигателя внутреннего сгорания на стороне А является холостой ход, в то время как двигатель внутреннего сгорания на стороне В выключается. При применении автоматизированной переключаемой под нагрузкой коробки передач устройство 9 управления тягой задает в качестве заданной ступени US(SL) передачи значение AUTO. При применении гидродинамической передачи устройство 9 управления тягой задает значение ноль.
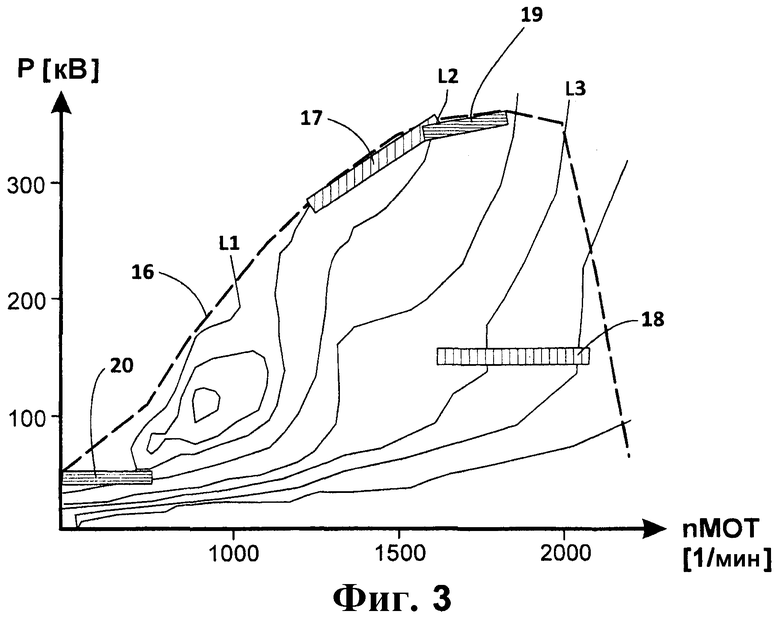
На фиг.3 показан график характеристик двигателя, в котором по оси абсцисс указана скорость вращения двигателя nMOT, а на оси ординат - отдаваемая двигателем мощность Р. Внутри поля характеристик показаны линии одинакового удельного расхода топлива. Так, линия L1 показывает, например, удельный расход топлива 190 г/кВтч, линия L2 - удельный расход топлива 200 г/кВтч и линия L3 - удельный расход топлива 230 г/кВтч. Позицией 16 обозначена изображенная штриховой линией кривая полной нагрузки. Для максимального ускорения рельсового транспортного средства двигатели внутреннего сгорания работают на линии 16 полной нагрузки характеристик двигателя, т.е. рабочие точки лежат вблизи линии 16 полной нагрузки. Это показано в качестве примера с помощью области 17 ускорения. После достижения максимально допустимой скорости рельсового транспортного средства, например, 120 км/ч, требуется значительно меньшая приводная мощность для сохранения установившегося режима. Поэтому оба двигателя внутреннего сгорания работают в области 18 установившегося режима. Однако область 18 установившегося режима лежит на линии L3, которая означает более высокий удельный расход топлива, чем линия L2. То есть, заданные рабочие точки двигателей внутреннего сгорания лежат в области характеристик двигателя со значительно более высоким удельным расходом топлива. Согласно изобретению, предусмотрено, что в установившемся режиме с помощью устройства управления тягой, например, двигатель внутреннего сгорания на стороне А работает с рабочей точкой в области 19 полной нагрузки на кривой 16 полной нагрузки, в то время как двигатель внутреннего сгорания на стороне В работает с рабочей точкой в области 20 холостого хода.
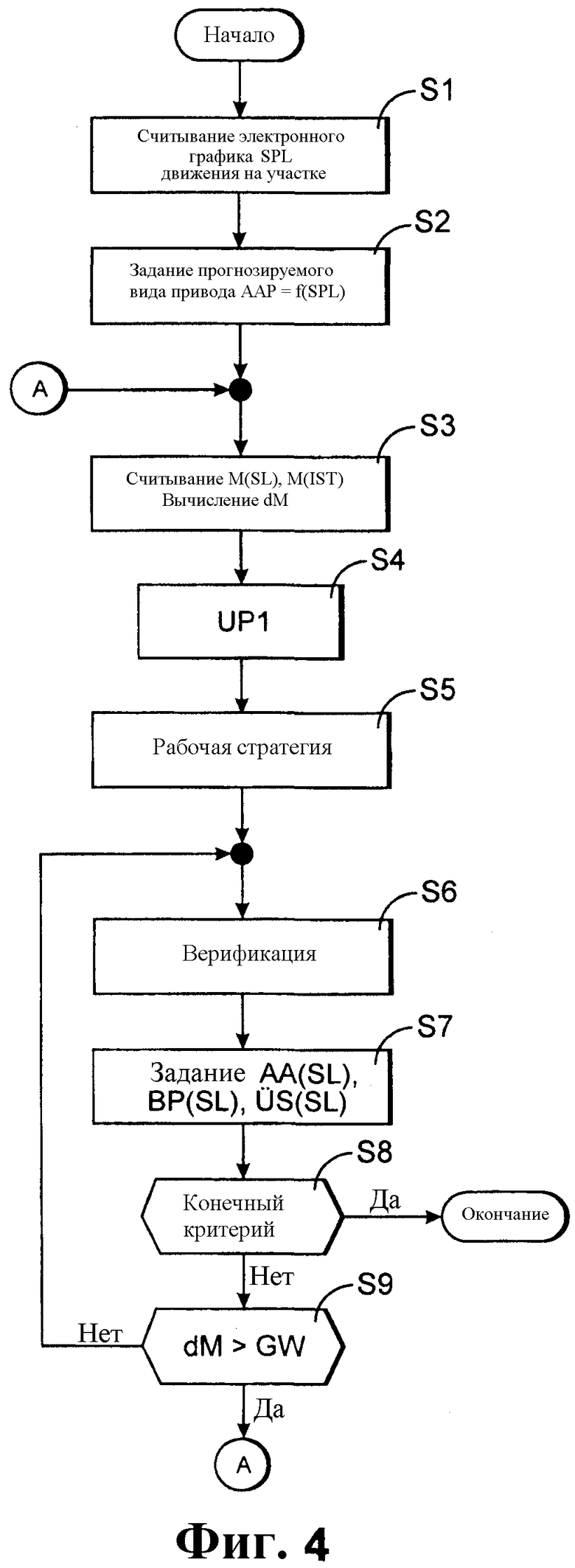
На фиг.4 показана блок-схема выполнения программы. На стадии S1 электронный график движения на участке SPL с прилагаемой картой участка считывается через дорожную радиорелейную связь и вводится в устройство управления составом. Перед началом поездки на стадии S2 заранее определяются и запоминаются относящиеся к отрезкам пути прогнозируемые виды ААР привода в зависимости от электронного графика SPL движения на участке. На стадии S3 затем считываются заданный приводной момент M(SL), а также действительный приводной момент M(IST) и затем вычисляется отклонение dM приводного момента. На стадии S4 происходит разветвление в подпрограмму UP1 для определения прогнозируемого вида ААР привода во время работы рельсового транспортного средства. Подпрограмма UP1 показана на фиг.5 и поясняется ниже со ссылками на эту фигуру. После возвращения из подпрограммы UP1 на стадии S5 задается с помощью рабочей стратегии (10 на фиг.2) вид привода, который затем на стадии S6 оценивается с помощью верификации (11 на фиг.2). На стадии S7 затем задаются заданный вид AA(SL) привода в смысле одинарного или двойного привода, заданная рабочая точка BP(SL), а также заданная ступень US(SL) передачи для передаточных блоков и передается в шину передачи данных. Затем на стадии S8 проверяется, имеется ли конечный критерий. Если это так, то результатом запроса на стадии S8 является да, и выполнение программы завершается. Если конечный критерий не распознается, то результатом запроса на стадии S8 является нет, и на стадии S9 сравнивается отклонение dM приводного момента с предельным значением GW. Если заданный приводной момента M(SL) и действительный приводной момент M(IST) отличаются лишь немного, то результатом запроса на стадии S9 является нет, и программа возвращается снова на стадию S6. Если отклонение dM приводного момента больше предельного значения GW, то результатом запроса на стадии S9 является да, и программа возвращается на стадию S3.
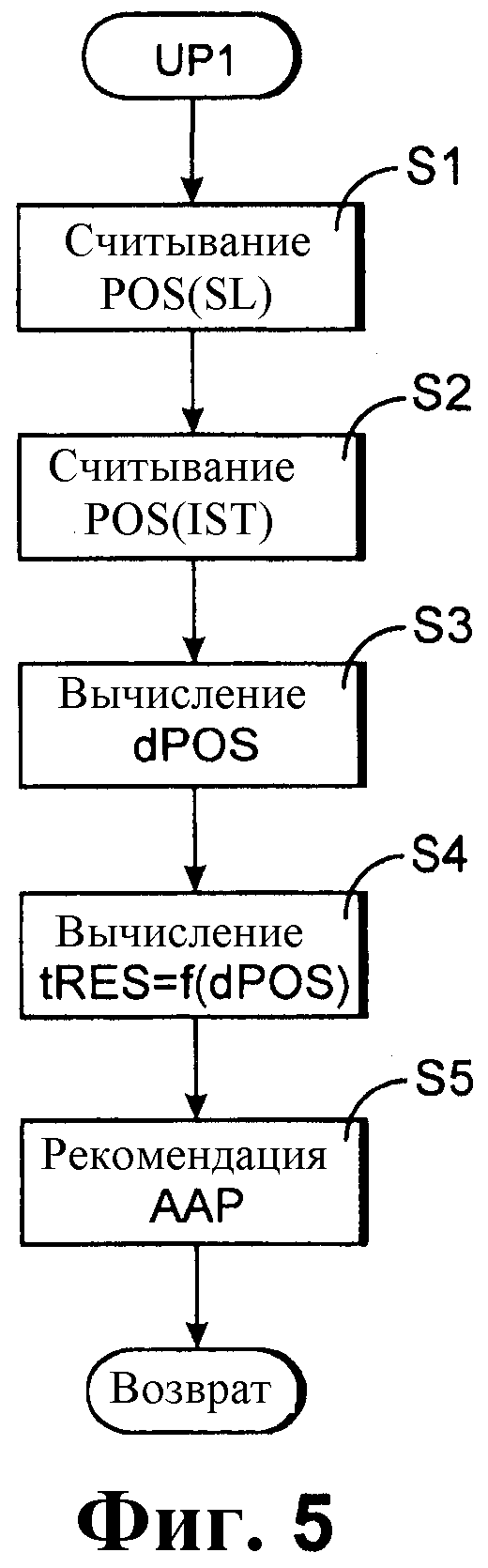
На фиг.5 показана подпрограмма UP1, с помощью которой вычисляется в качестве рекомендации прогнозируемый вид ААР привода. На стадии S1 определяется заданное положение POS(SL) рельсового транспортного средства на основании графика движения на участке и времени. После этого на стадии S2 считывается действительное положение POS(IST) с помощью системы GPS и на стадии S3 определяется отклонение dPOS положения. Из отклонения dPOS вычисляется в свою очередь на стадии S2 резерв tRES времени, оценивается на стадии S5, и рекомендуется прогнозируемый вид ААР привода. Резерв времени указывает, достигает ли рельсовое транспортное средство следующую точку пути своевременно, слишком рано или слишком поздно. Если резерв tRES времени лежит внутри поля допусков, то рекомендуется сохранение прогнозируемого вида ААР привода. Если резерв tRES времени лежит вне поля допусков и является отрицательным в смысле опоздания, то рекомендуется прогнозируемый вид привода с повышенной отдачей мощности. Если резерв tRES времени лежит вне поля допусков и является положительным в смысле опережения, то рекомендуется прогнозируемый вид привода с самым низким расходом энергии. После этого программа возвращается на стадию S4 на фиг.4.
В целом, изобретение обеспечивает преимущество еще раз уменьшенного расхода топлива тем, что устройство управления тягой в соединении с прогнозированием с использованием электронного графика движения на участке и профиля высоты обеспечивает прогнозируемый вид привода. Поэтому для пользователя снижается стоимость эксплуатации.
ПЕРЕЧЕНЬ ПОЗИЦИЙ
Изобретение относится к управлению рельсовым транспортным средством. Способ управления рельсовым транспортным средством, содержащим двойную приводную установку, при этом каждая установка содержит двигатель внутреннего сгорания и передаточный блок, в котором задают заданный приводной момент в качестве желаемой мощности. Также определяют действительный приводной момент рельсового транспортного средства, вычисляют отклонение приводного момента из заданного приводного момента и действительного приводного момента. Затем определяют прогнозируемый вид привода и в зависимости от отклонения приводного момента, а также предсказуемого вида привода с помощью устройства управления тягой задают одинарный или двойной привод, рабочую точку и ступень передачи для передаточных блоков. Решение направлено на снижение расхода топлива. 4 з.п. ф-лы, 5 ил.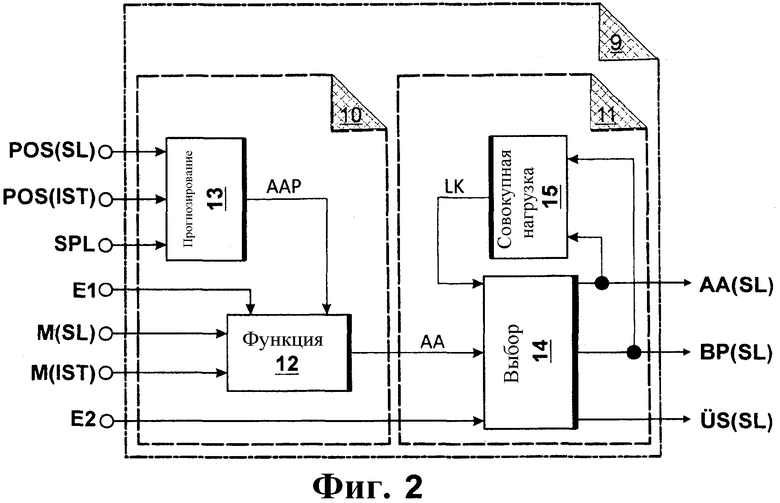
1. Способ управления рельсовым транспортным средством (1), содержащим двойную приводную установку, при этом каждая приводная установка содержит двигатель внутреннего сгорания, а также передаточный блок, в котором задают с помощью рычага управления заданный приводной момент (M(SL)) в качестве желаемой мощности, определяют действительный приводной момент (M(IST)) рельсового транспортного средства (1), вычисляют отклонение (dM) приводного момента из заданного приводного момента (M(SL)) и действительного приводного момента (M(IST)), определяют прогнозируемый вид (ААР) привода и в зависимости от отклонения (dM) приводного момента, а также предсказуемого вида (ААР) привода с помощью устройства (9) управления тягой задают заданный вид (AA(SL)) привода в смысле одинарного или двойного привода, заданную рабочую точку (BP(SL)), а также заданную ступень (US(SL)) передачи для передаточных блоков.
2. Способ по п.1, отличающийся тем, что записывают совокупную нагрузку (15) двигателей внутреннего сгорания и решающим образом учитывают совокупную нагрузку (15) при задании заданного вида (AA(SL)) привода и заданной рабочей точки BP(SL).
3. Способ по п.2, отличающийся тем, что при задании заданного вида (AA(SL)) привода учитывают уровень заполнения горючего двигателя.
4. Способ по любому из пп.1-3, отличающийся тем, что определяют прогнозируемый вид (ААР) привода тем, что считывают электронный график (SPL) движения на участке в виде относящихся к отрезкам участка скоростей с помощью устройства (3А, 3В) управления составом, перед началом поездки заранее определяют относящиеся к отрезкам участка прогнозируемые виды (ААР) привода рельсового транспортного средства (1) с помощью электронного графика (SPL) движения на участке, во время движения определяют отклонение (dPOS) действительного положения (POS(IST)) относительно определяемого из электронного графика движения на участке заданного положения (POS(SL)) рельсового транспортного средства (1), на основании отклонения (dPOS) положения вычисляют резерв (tRES) времени и в зависимости от резерва (tRES) времени предлагают сохранение прогнозируемого вида (ААР) привода или смену прогнозируемого вида (ААР) привода.
5. Способ по п.4, отличающийся тем, что при отрицательном резерве (tRES) времени в смысле опоздания предлагают прогнозируемый вид (ААР) привода с повышенной отдачей мощности, при резерве (tRES) времени внутри поля допусков предлагают сохранение прогнозируемого вида (ААР) привода и при положительном резерве (tRES) времени в смысле преждевременного прибытия предлагают прогнозируемый вид (ААР) привода с самым низким расходом энергии.
| DE 102007047178 A1, 30.04.2008 | |||
| US 2006138285 A1, 29.06.2006 | |||
| МАШИНА ДЛЯ МОЙКИ ТАРЕЛОК ЦЕНТРОБЕЖНЫХ СЕПАРАТОРОВ | 0 |
|
SU255132A1 |
| Узел крепления рабочего колеса центробежного вентилятора на валу | 1986 |
|
SU1455052A1 |

