Изобретение относится к области радиосвязи, а именно к способам управления многолучевым покрытием зоны обслуживания, созданным спутником-ретранслятором (CP), обращающимся по высокоэллиптической орбите (ВЭО) и оснащенным многолучевыми антеннами (МЛА) для связи с земными станциями, расположенными в зонах обслуживания произвольной формы.
Известен способ (патент РФ №2121225) управления многолучевым покрытием зоны обслуживания в спутниковой системе, включающий использование негеостационарных спутников, оснащенных МЛА и создающих на земной поверхности сотовую структуру. В процессе движения спутника по орбите производят управление зонами лучей многолучевой антенны, включают и отключают различные зоны лучей так, чтобы сохранить состояние антенного охвата без слишком большого перекрытия, когда спутники приближаются или отдаляются от полюсов.
Известен также способ (патент РФ №2265956) управления многолучевым покрытием зоны обслуживания в спутниковой системе, включающий использование CP, оснащенного МЛА, формирующими многолучевое покрытие зоны обслуживания. В процессе движения CP по орбите ведут запись данных по точкам прицеливания лучей МЛА и их зонам, а также хранят данные о зоне обслуживания, таким образом обрабатывают множество лучей, определяют размеры зон лучей и углов наведения лучей, при этом управляющее устройство обеспечивает управление одной или несколькими многолучевыми антеннами для изменения диаметра зон лучей и углов наведения лучей. Данный способ выбран в качестве прототипа как наиболее близкий к способу по предлагаемому изобретению.
Недостатком обоих способов является то, что они не обеспечивают оптимальное управление многолучевым покрытием зоны обслуживания применительно к системам связи, в которых в процессе движения CP по рабочему участку ВЭО (т.е. над заданной зоной обслуживания) происходит вращение CP, а вместе с ним МЛА, формирующей многолучевое покрытие, по отношению к зоне обслуживания. При отсутствии специальных способов управления многолучевым покрытием зоны обслуживания указанное покрытие должно иметь такой угловой размер и включать в себя такое число лучей, при которых за период нахождения CP над зоной обслуживания, последняя не выходила бы за пределы многолучевого покрытия вследствие перемещения CP относительно поверхности Земли. Это приводит к необходимости постоянного задействования большего числа лучей, чем это необходимо для покрытия зоны обслуживания в каждый конкретный момент времени.
Целью предлагаемого изобретения является обеспечение эффективного использования бортовой приемопередающей аппаратуры спутника-ретранслятора, участвующей в формировании многолучевого покрытия зоны обслуживания.
Поставленная цель достигается тем, что на спутнике-ретрансляторе, обращающемся по высокоэллиптической орбите, оснащенном многолучевыми антеннами для связи с земными станциями, формирующем многолучевое покрытие зоны обслуживания, ведущем в процессе движения по ВЭО запись данных по точкам прицеливания лучей МЛА и их зонам, а также хранящем данные о зоне обслуживания, устанавливают угловой размер зоны покрытия МЛА не менее углового размера зоны обслуживания в самой широкой ее части, видимой в момент нахождения CP в начале или конце рабочего участка ВЭО, поддерживают в процессе движения CP по рабочему участку ВЭО направление оси центрального луча МЛА на центр зоны обслуживания, определяют в начале рабочего участка ВЭО на основании хранящихся на борту CP данных по антенным лучам и зоне обслуживания активные лучи, зоны которых перекрываются с зоной обслуживания, и пассивные лучи, зоны которых не перекрываются с зоной обслуживания, подключают активные лучи к бортовой приемопередающей аппаратуре, осуществляют периодически контроль совпадения зон лучей с зоной обслуживания, по результатам указанного контроля отключают от бортовой приемопередающей аппаратуры те активные лучи, зоны которых не перекрываются с зоной обслуживания, и подключают к бортовой приемопередающей аппаратуре те пассивные лучи, зоны которых перекрываются с зоной обслуживания.
Сущность предлагаемого изобретения поясняется чертежами, где
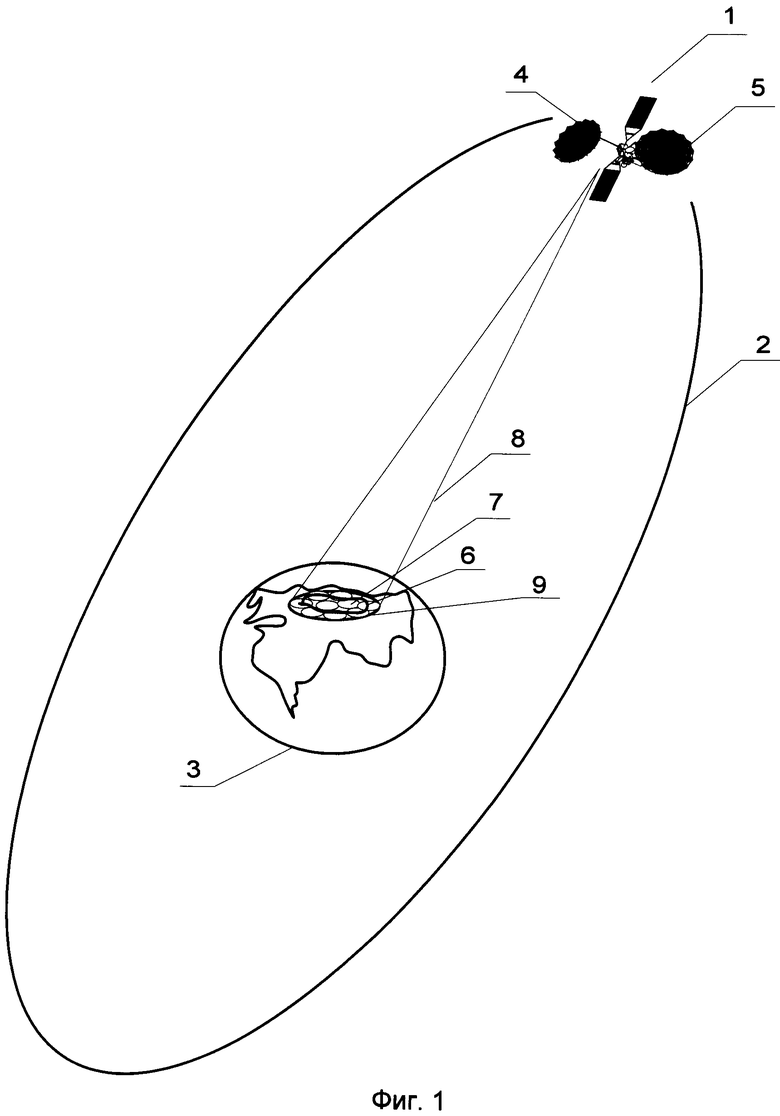
- на фиг.1 представлен общий вид системы связи, реализующей предлагаемый способ;
- на фиг.2 показана трасса движения CP на рабочем участке ВЭО;
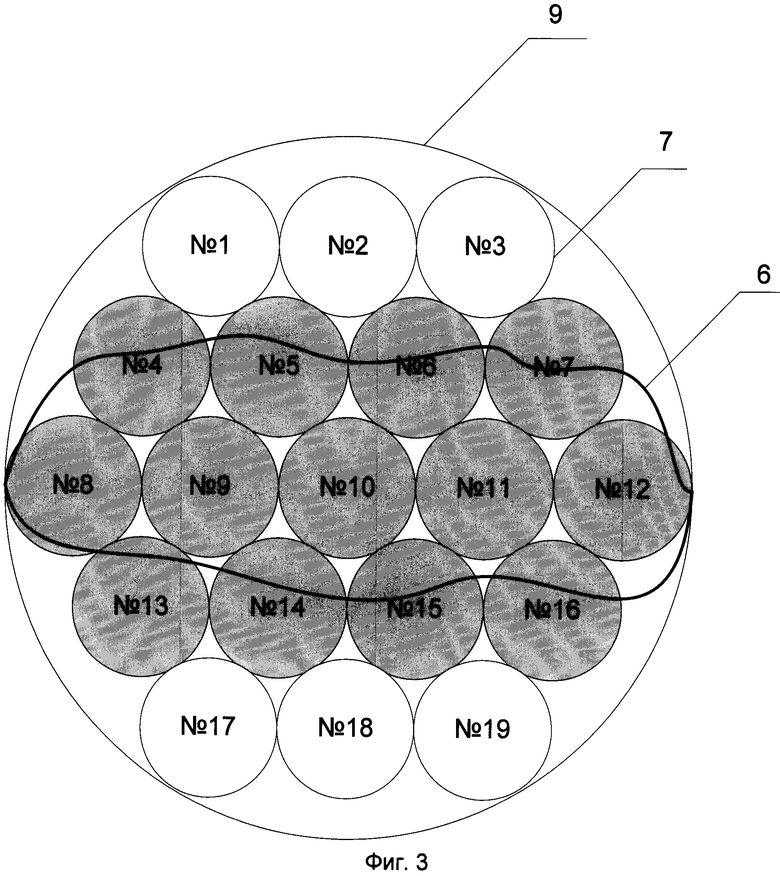
- на фиг.3 приведены зоны лучей МЛА и зона обслуживания в момент нахождения CP в начале рабочего участка ВЭО;
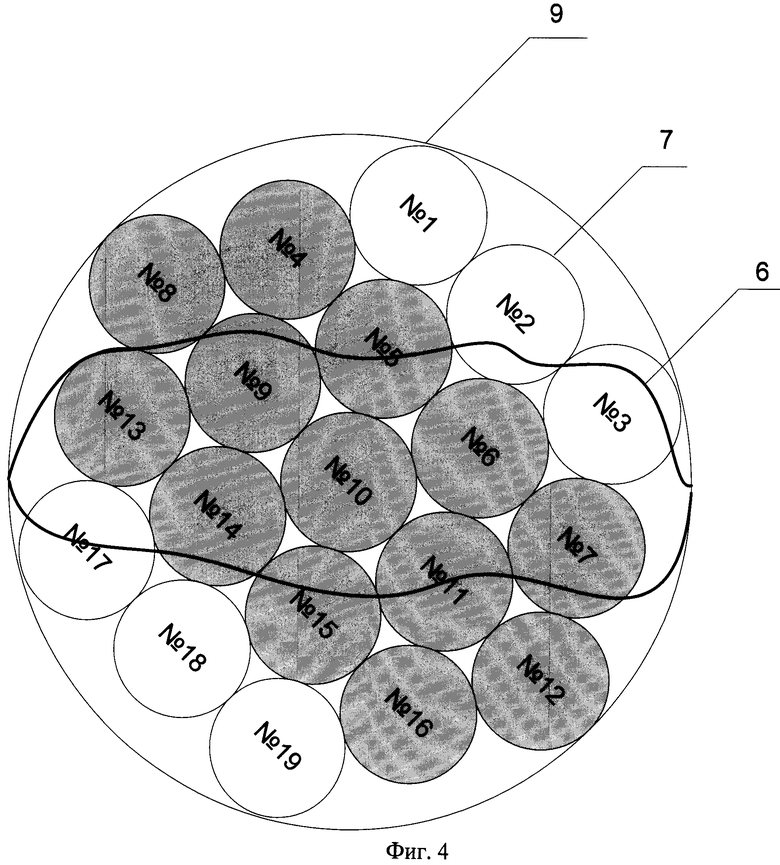
- на фиг.4 приведены зоны лучей МЛА и зона обслуживания в момент нахождения CP в некоторой произвольной точке рабочего участка ВЭО;
- на фиг.5 представлена функциональная схема бортовой аппаратуры CP, реализующей предлагаемый способ.
В соответствии с фиг.1 спутниковая система связи включает в себя спутник-ретранслятор 1, обращающийся по ВЭО 2 вокруг Земли 3 и оснащенный многолучевыми антеннами 4 (приемная) и 5 (передающая). (Хотя в «классических» системах связи на ВЭО в состав их орбитальных группировок входит несколько CP, действующим является только один CP, находящийся над заданной зоной обслуживания. Такой CP и рассматривается в дальнейшем). CP 1 находится над зоной обслуживания 6, для связи с которыми МЛА 4 и 5 формируют многолучевое покрытие из зон лучей 7, которые заполняют собой указанную зону обслуживания 6. Область формирования многолучевого покрытия ограничена конусом 8, проекция которого на земную поверхность ограничена окружностью 9. Максимальный угловой размер этого конуса определяется размерами зоны обслуживания 6, видимой с CP 1 в момент нахождения его в начале рабочего участка ВЭО 2 (подробнее см. ниже).
На фиг.2 в качестве примера показана трасса движения CP на рабочем участке ВЭО длительностью 8 часов (применительно к ВЭО типа «Тундра» с периодом обращения 24 часа). На данной фигуре введены следующие обозначения: 10 - начало рабочего участка, когда CP 1 входит в зону обслуживания 6, 11 - восходящая часть трассы, 12 - апогей ВЭО, 13 - нисходящая часть трассы и 14 - конец рабочего участка, когда CP 1 выходит из зоны обслуживания 6.
На фиг.2 как пример зоны обслуживания 6 рассматривается территория стран СНГ, располагающаяся между 20 и 180° в.д. и между 36 и 80° с.ш. Для суточной ВЭО высота над поверхностью Земли в апогее составляет 46700 км, в начале или в конце рабочего участка ВЭО - 42600 км. Поэтому угловой размер конуса 8 применительно к зоне обслуживания из фиг.2 должен определяться углом, под которым из точки 10 (14) видны крайние западная и восточная точки границы зоны обслуживания, поскольку угол визирования указанных точек границы из точки 12 (апогея) будет несколько меньше.
Современные системы спутниковой связи, в частности, с подвижными объектами оснащаются для получения требуемого энергопотенциала радиолиний крупногабаритными многолучевыми антеннами диаметром не менее 12 м (спутники «Турайя», «Гаруда», «Инмарсат-4» и др.), которые жестко связаны с корпусом спутника. Поскольку перечисленные спутники являются геостационарными, то расположение многолучевого покрытия относительно зоны обслуживания неизменно во времени ввиду достаточно жесткой привязки осей спутника к осям земной системы координат.
Другое дело, когда подобная система связи базируется на спутниках, обращающихся по высокоэллиптической орбите. Как видно из фиг.2, при движении по трассе CP довольно существенно перемещается относительно поверхности Земли как по широте, так и по долготе. Вместе с ним перемещается и антенна. Кроме того, при движении по ВЭО, в том числе и на рабочем участке, происходит и вращение CP вокруг его радиуса-вектора, направленного из центра притяжения (т.е. центра Земли) к центру масс СР.
Поэтому при жесткой привязке МЛА к корпусу CP резко возрастает сектор обзора, из поля зрения которого заданная зона обслуживания гарантированно не выйдет в период движения CP на рабочем участке. Соответственно возрастает и количество лучей, необходимых для покрытия в этот период заданной зоны обслуживания, хотя число лучей, требуемое в каждый конкретный момент времени будет существенно меньше. При этом в процессе движения CP требуется обеспечивать отключение лучей, уже не охватывающих заданную зону, и подключение новых лучей, в зоне которых появились участки заданной зоны.
Необходимо также подчеркнуть, что при движении CP, например, по восходящей части трассы 11 увеличивается высота CP над зоной обслуживания и сокращается необходимый сектор ее обзора со стороны СР. Одновременно увеличивается и размер зон обслуживания лучей МЛА. Это приводит к снижению в этот период числа лучей МЛА, требующихся для покрытия заданной зоны обслуживания.
Обеспечить условия, при которых для покрытия заданной зоны обслуживания требуется минимальное число лучей МЛА, можно было бы, если бы имелась возможность поддерживать необходимую пространственную ориентацию МЛА, т.е. созданием соответствующего противовращения антенны или ее элементов, компенсирующего вращение СР. Однако существующие приводы способны лишь перемещать геометрическую ось антенны в двух взаимно перпендикулярных направлениях. Поэтому в данных условиях наиболее целесообразным представляется обеспечить постоянное наведение продольной оси МЛА (точнее - оси ее центрального луча) на центр зоны обслуживания. Указанная мера позволит свести к минимуму необходимый сектор обзора.
Обратимся к фиг.3, на которой приведены зоны лучей МЛА и зона обслуживания в момент нахождения CP в начале рабочего участка ВЭО. На данной фигуре в качестве примера приведены произвольная зона обслуживания 6 и многолучевое покрытие, состоящее из 19 лучей МЛА с зонами 7. Размер области формирования многолучевого покрытия, проекция которой на фиг.3 представлена окружностью 9, определяется угловым размером зоны обслуживания 6, наблюдаемым из точки нахождения CP в начале рабочего участка ВЭО. Точка прицеливания центрального луча МЛА (на фиг.3 этот луч показан под номером №10) совпадает с центром зоны обслуживания 6. То есть угловой размер многолучевого покрытия выбирается таким, что при вращении МЛА вокруг оси центрального луча в процессе движения CP по рабочему участку ВЭО зона обслуживания 6 не выйдет за пределы границы области формирования многолучевого покрытия 9.
Пусть в начале рабочего участка ВЭО на CP зафиксированы координаты зоны обслуживания 6 и зон лучей 7 МЛА. Данные об этом хранятся в запоминающем устройстве бортового комплекса управления (БКУ) СР. С помощью вычислительных средств из состава БКУ CP производится анализ совпадения зоны обслуживания 6 с каждой из зон лучей 7 МЛА. Т.е. для зон лучей 7 и зоны обслуживания 6 вычисляются, например, матрицы координат, а затем производится сравнение этих матриц на предмет наличия совпадающих точек. Как видно из фиг.3, по результатам такого анализа делается вывод о том, что лучи под номерами №№4-16 (их зоны затемнены) частично или полностью участвуют в качестве активных лучей для покрытия зоны обслуживания 6. Указанные лучи должны быть подключены к бортовой ретрансляционной аппаратуре СР. В то же время лучи под номерами №№1-3 и №№17-19 квалифицируются как пассивные и к ретрансляционной аппаратуре CP не подключаются. Такая конфигурация активных и пассивных лучей устанавливается для начала рабочего участка ВЭО.
Спустя некоторое время после начала движения CP по восходящей части рабочего участка ВЭО вследствие поворота CP, а вместе с ним и МЛА, происходит взаимное смещение зон лучей 7 и зоны обслуживания 6. Т.е. происходит поворот многолучевого покрытия из зон лучей 7 относительно зоны обслуживания 6 вокруг продольной оси МЛА. Кроме того, из-за возрастания при этом движении высоты полета CP уменьшается угловой размер зоны обслуживания 6. Данная ситуация иллюстрируется на фиг.4. В этом случае по результатам сравнения матриц координат зоны обслуживания 6 и зон лучей 7 делается вывод, что активные до данного момента лучи под номерами №4, №8, №12 и №16 уже не участвуют в покрытии зоны обслуживания 6. Они переводятся в разряд пассивных и отключаются от бортовой ретрансляционной аппаратуры СР. Вместо этого к покрытию зоны обслуживания 6 привлекаются лучи под номерами №2, №3 и №17, бывшие до этого пассивными, а теперь переведенные в разряд активных с дальнейшим подключением к бортовой ретрансляционной аппаратуре СР.
Реализация предлагаемого способа возможна с помощью входящих в состав CP типовых устройств, приведенных на фиг.5.
Система навигации и управления движением центра масс CP (СНУД) 15 по данным о его местоположении, получаемым либо от центра управления полетом спутника-ретранслятора, либо от глобальной навигационной спутниковой системы (на фиг.5 не показано), применительно к CP на высокоэллиптической орбите осуществляет:
- определение параметров ВЭО спутника-ретранслятора;
- формирование временных меток;
- расчет матриц перехода от геоцентрической экваториальной системы координат к орбитальной системе координат;
- расчет текущего углового размера Земли;
- расчет текущей угловой скорости в плоскости ВЭО;
- расчет дальности до подспутниковой точки и углов наведения антенн, и другие баллистические параметры, необходимые для функционирования различных бортовых систем СР.
Программную реализацию алгоритмов управления и контроля бортовых систем CP, выполнение расчетных операций (в том числе и в интересах СНУД 15) и выдачу результатов расчета и управляющих воздействий в бортовые системы и исполнительные устройства CP осуществляет бортовой комплекс управления (БКУ) 16. Основным элементом БКУ 16 является входящий в его состав бортовой цифровой вычислительный комплекс (БЦВК) (на фиг.5 не показан). В состав БКУ 16 входит также программное обеспечение, необходимое для выполнения всех расчетных операций.
Для реализации предлагаемого способа БКУ 16 управляет коммутационной матрицей приемных антенных лучей (КМ) 17, которая из общего числа лучей N, формируемых приемной МЛА (на фиг.5 данная МЛА показана в виде рефлектора 18 и диаграммо-образующей схемы (ДОС) 19, формирующей N лучей), подключает к многоканальной ретрансляционной аппаратуре 20 только М лучей. М - максимальное число лучей, необходимое для покрытия заданной зоны обслуживания в период нахождения CP на рабочем участке ВЭО и М<N. Антенна 21 служит для передачи принятых от абонентских земных станций сигналов на центральную станцию.
Для простоты изложения на фиг.5 не показан тракт передачи от центральной станции к абонентским, т.к. управление коммутационной матрицей передающих лучей МЛА будет осуществляться аналогичным образом по командам БКУ 16.
На фиг.5 показана также система наведения антенны (СНА) 41, которая по командам из БКУ 16 управляет наведением продольной оси рефлектора 18 на центр зоны обслуживания в процессе движения CP по рабочему участку ВЭО. Данные о необходимых углах наведения поставляются в БКУ 16 из СНУД 15.
Как уже упоминалось при рассмотрении фиг.3 и 4, для реализации предлагаемого способа в начале рабочего участка CP в БЦВК БКУ 16 рассчитываются матрицы координат зоны обслуживания 6 и зон лучей 7 и фиксируются в запоминающем устройстве БЦВК. Эти данные могут быть представлены, например, в орбитальной системе координат. Затем производится сравнение этих матриц на предмет наличия совпадающих точек и определяются номера лучей МЛА, зоны которых частично или полностью покрывают зону обслуживания 6. На основании полученных данных в БКУ 16 формируются команды для КМ 17, которая обеспечивает подключение указанных лучей к многоканальной ретрансляционной аппаратуре 20. Кроме того, БКУ 16 на основании рассчитанных углов наведения МЛА выдает в СНА 22 команды на наведение продольной оси МЛА на центр зоны обслуживания 6. В ответ КМ 17 и СНА 22 выдают в БКУ 16 сигналы об исполнении команд управления.
Через заданный интервал времени, определяемый динамикой взаимного перемещения зон лучей 7 и зоны обслуживания 6, связанной в свою очередь с параметрами ВЭО CP, в БЦВК БКУ 16 рассчитываются новые матрицы координат зоны обслуживания 6 и зон лучей 7 и повторяется операция сравнения этих матриц с целью выявления новых лучей МЛА, участвующих или не участвующих на данный момент времени в покрытии зоны обслуживания 6. При наличии таких лучей БКУ 16 выдаются соответствующие команды для КМ 17.
Указанный процесс периодически повторяется до конца рабочего участка ВЭО СР. Затем ретрансляционная аппаратура CP отключается до нового его прихода в начало рабочего участка, после чего повторяется весь описанный выше цикл.
Использование предлагаемого способа обеспечивает задействование для покрытия заданной зоны обслуживания в системах связи с использованием высокоэллиптических спутников-ретрансляторов, оснащенных многолучевыми антеннами, только минимально необходимого в каждый данный момент времени числа лучей. Это позволяет более эффективно использовать бортовые ресурсы спутника-ретранслятора.
Из известных автору источников патентных и информационных материалов не известна совокупность признаков, эквивалентных (или совпадающих) с признаками данного предлагаемого изобретения, поэтому заявитель склонен считать техническое решение, отвечающим критерию «новизна».
Настоящее решение технически реализуемо, поскольку базируется на известных и отработанных устройствах, и предлагается к использованию в спутниковой системе связи, предназначенной для информационного обмена с подвижными земными станциями.

Изобретение относится к области радиосвязи с применением спутников-ретрансляторов на высокоэллиптических орбитах. Технический результат состоит в повышении эффективности использования бортовой приемопередающей аппаратуры спутника-ретранслятора, участвующей в формировании многолучевого покрытия зоны обслуживания. Для этого на спутнике-ретрансляторе устанавливают угловой размер зоны покрытия многолучевой антенны не менее углового размера зоны обслуживания в самой широкой ее части, поддерживают в процессе движения спутника-ретранслятора направление оси центрального луча многолучевой антенны на центр зоны обслуживания, определяют активные лучи, зоны которых перекрываются с зоной обслуживания, и пассивные лучи, зоны которых не перекрываются с зоной обслуживания, подключают активные лучи к бортовой приемопередающей аппаратуре, осуществляют периодически контроль совпадения зон лучей с зоной обслуживания, по результатам контроля отключают от бортовой аппаратуры те активные лучи, зоны которых не перекрываются с зоной обслуживания, и подключают к бортовой приемопередающей аппаратуре те пассивные лучи, зоны которых перекрываются с зоной обслуживания. 5 ил.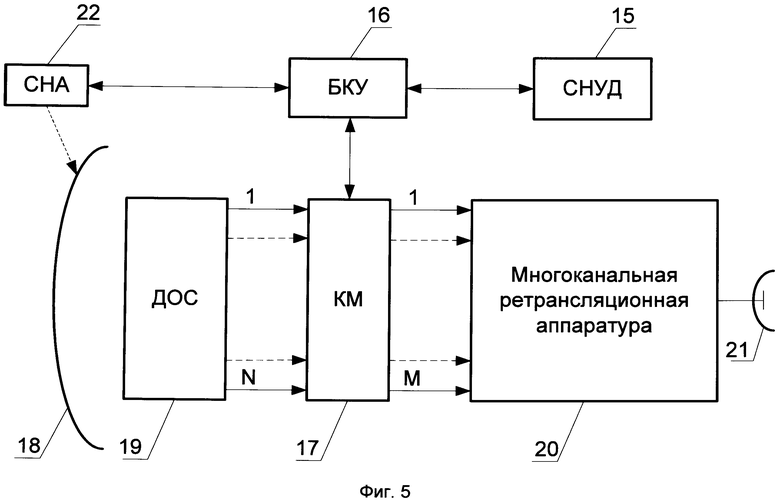
Способ управления многолучевым покрытием зоны обслуживания в спутниковой системе с использованием спутников-ретрансляторов на высокоэллиптической орбите, оснащенных многолучевой антенной для связи с земными станциями в течение периода нахождения спутника-ретранслятора над зоной обслуживания указанных станций, при котором на спутнике-ретрансляторе формируют многолучевое покрытие зоны обслуживания, в процессе движения спутника-ретранслятора по орбите ведут запись данных по точкам прицеливания лучей многолучевой антенны и их зонам, а также хранят данные о зоне обслуживания, отличающийся тем, что устанавливают угловой размер зоны покрытия многолучевой антенны не менее углового размера зоны обслуживания в самой широкой ее части, видимой в момент нахождения спутника-ретранслятора в начале или конце рабочего участка высокоэллиптической орбиты, поддерживают в процессе движения спутника-ретранслятора по рабочему участку высокоэллиптической орбиты направление оси центрального луча многолучевой антенны на центр зоны обслуживания, определяют в начале рабочего участка высокоэллиптической орбиты на основании хранящихся на борту спутника-ретранслятора данных по антенным лучам и зоне обслуживания активные лучи, зоны которых перекрываются с зоной обслуживания, и пассивные лучи, зоны которых не перекрываются с зоной обслуживания, подключают активные лучи к бортовой приемопередающей аппаратуре, осуществляют периодически контроль совпадения зон лучей с зоной обслуживания, по результатам указанного контроля отключают от бортовой приемопередающей аппаратуры те активные лучи, зоны которых не перекрываются с зоной обслуживания, и подключают к бортовой приемопередающей аппаратуре те пассивные лучи, зоны которых перекрываются с зоной обслуживания.
| СПОСОБЫ РАБОТЫ СПУТНИКОВОЙ КОММУНИКАЦИОННОЙ СИСТЕМЫ, СПОСОБ УПРАВЛЕНИЯ ЕЕ РАБОТОЙ И СИСТЕМА УПРАВЛЕНИЯ СПУТНИКОВЫМ АНТЕННЫМ ОХВАТОМ НЕГЕОСТАЦИОНАРНОЙ ОРБИТАЛЬНОЙ МНОГОСПУТНИКОВОЙ СИСТЕМЫ | 1992 |
|
RU2121225C1 |
| ОПТИМИЗАЦИЯ СИСТЕМЫ С ИСПОЛЬЗОВАНИЕМ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2000 |
|
RU2265956C2 |
| Матрица для прессования изделий с выступами и впадинами | 1975 |
|
SU549220A1 |
| US5367304 A 22.11.1994 | |||

