Изобретение относится к области радиосвязи с применением спутников-ретрансляторов.
Данное техническое решение в первую очередь предназначено для построения оптимальной системы спутниковой связи в интересах наведения летательного аппарата на подвижный объект (в частности надводный) в условиях, когда начальное местоположение, направление и скорость движения носят случайный характер.
Современный уровень развития ракетно-космической техники предполагает нахождение на орбите космических аппаратов, в том числе спутников связи, обладающих возможностью изменения орбиты в зависимости от возникающих задач. Орбиту можно модифицировать сообщением спутнику связи дополнительного импульса. Например, скорость спутника связи можно изменить кратковременным включением маневрового ракетного двигателя, предварительно сориентировав спутник так, чтобы получить заданный результат.
В таких условиях объективно существует задача оптимального распределения спутников связи в пространстве для достижения максимального эффекта в рамках решаемой задачи.
Если рассматривать практику выведения на орбиту современных спутников связи, которая предполагает одновременное выведение в рамках, например, кластерного запуска порядка 100 спутников и более, то задача оптимизации их взаимного расположения под конкретную решаемую задачу возникает естественным образом.
В предлагаемом изобретении под изменением параметров орбит понимается как маневрирование спутников уже существующей группировки, так и формирование новой группировки с учетом оптимальных параметров.
Одной из задач, которые приходится решать с использованием спутниковой связи, является управление летательными аппаратами, к которым в контексте предлагаемого изобретения относятся беспилотные летательные аппараты и управляемые ракеты.
Задача управления усложняется, когда из-за технических особенностей спутников и летательных аппаратов отсутствует возможность обеспечения непрерывной связи. Подобного рода сложности могут быть обусловлены энергетическими, функциональными и аппаратными возможностями спутников и летательных аппаратов, рельефом местности, наличием плазменного следа при движении на больших скоростях, погодными явлениями и другими факторами. Сам процесс передачи управляющих сообщений является достаточно сложным и многофакторным.
Еще большую сложность задача управления летательным аппаратом, приобретает, когда место назначения известно не точно. То есть, объект на который осуществляется наведение может иметь случайные координаты. Таким объектом может быть айсберг, в направлении которого должен быть совершен управляемый полет беспилотного летательного аппарата или ракеты для уничтожения заданной цели. Другой пример - это дрейфующая лаборатория или корабль на которые посредством беспилотного летательного аппарата должно быть доставлено оборудование или снабжение.
В контексте предлагаемого способа подвижный надводный объект обладает случайными координатами и случайным изменением направления движения. При этом должна быть обеспечена возможность наведения на него летательного аппарата с использованием группировки спутниковой системы связи.
Основная идея способа заключается в том, что производят оптимизацию орбитального построения группировки космических аппаратов посредством разбиения зоны возможного положения подвижного надводного объекта на секторы и определяют с учетом характеристик летательного аппарата, надводного объекта и передаваемых сигналов управления, оптимальные параметры орбит с использованием одного из методов статистических испытаний (полного перебора, Монте-Карло) в рамках имитационного моделирования.
Известно изобретение «Оптимизация системы с использованием формирования диаграммы направленности антенны» (патент RU № 2265956, 2003).
Сущность данного изобретения заключается в следующем.
Способ повышения пропускной способности системы в спутниковой системе связи (как составная часть изобретения-аналога), содержащей множество спутников связи, в которой спутник содержит антенную решетку и формирователь диаграммы направленности антенны для создания множества лучей, заключающийся в том, что: определяют местоположение упомянутого спутника с использованием широты, представляющей собой угловое расстояние, измеренное в градусах относительно экватора; формируют множество лучей на основании упомянутого местоположения; идентифицируют первый луч в упомянутом множестве лучей; определяют, требуется ли изменение первого луча по направлению, на основании местоположения упомянутого спутника; определяют, требуется ли изменение размера сотовой ячейки для упомянутого первого луча, и изменяют диаметр сотовой ячейки для осуществления упомянутого изменения размера сотовой ячейки, отличающийся тем, что: дополнительно определяют, требуется ли изменение угла наведения луча для упомянутого первого луча; изменяют расстояние между центрами сотовых ячеек для осуществления упомянутого изменения угла наведения луча; дополнительно определяют, требуется ли изменение размера сотовой ячейки для упомянутого первого луча, и изменяют малую ось сотовой ячейки для осуществления упомянутого изменения размера сотовой ячейки; дополнительно определяют, требуется ли изменение угла наведения луча для упомянутого первого луча, и изменяют расстояние между фокальными точками сотовых ячеек для осуществления упомянутого изменения угла наведения луча; дополнительно идентифицируют второй луч в упомянутом множестве лучей и определяют, требуется ли изменение второго луча на основании местоположения упомянутого спутника; дополнительно идентифицируют второй луч в упомянутом множестве лучей, идентифицируют местоположение второй сотовой ячейки, связанной со вторым лучом, и определяют, требуется ли изменение второго луча на основании местоположения спутника и местоположения второй сотовой ячейки; дополнительно идентифицируют местоположение первой сотовой ячейки, связанной с упомянутым первым лучом, и определяют, требуется ли изменение первого луча на основании местоположения спутника и местоположения первой сотовой ячейки; дополнительно идентифицируют местоположение первой сотовой ячейки, связанной с упомянутым первым лучом, и определяют, требуется ли изменение первого луча на основании местоположения спутника и времени суток в данном местоположении спутника; дополнительно идентифицируют первую группу лучей в упомянутом множестве лучей и определяют, требуется ли изменение первой группы лучей на основании местоположения упомянутого спутника; дополнительно идентифицируют первую группу лучей в упомянутом множестве лучей, идентифицируют местоположение первой группы сотовых ячеек, связанных с первой группой лучей, и определяют, требуется ли изменение первой группы лучей на основании местоположения спутника и местоположения первой группы сотовых ячеек; дополнительно идентифицируют вторую группу лучей в упомянутом множестве лучей, идентифицируют местоположение второй группы сотовых ячеек, связанных с упомянутой второй группой лучей, и определяют, требуется ли изменение второй группы лучей на основании местоположения спутника и местоположения второй группы сотовых ячеек; первую группу лучей и вторую группу лучей идентифицируют, используя таблицу, хранимую на спутнике, причем указанная таблица обеспечивает информацию, по меньшей мере, о размерах сотовых ячеек и углах наведения луча; первую группу лучей и вторую группу лучей идентифицируют, используя кольцеобразные группы сотовых ячеек; первую группу лучей и вторую группу лучей идентифицируют, используя ряды сотовых ячеек; дополнительно определяют, требуются ли изменения размеров сотовых ячеек для упомянутой первой группы сотовых ячеек, изменяют диаметры сотовых ячеек для осуществления упомянутых изменений размеров сотовых ячеек, определяют, требуются ли изменения углов наведения луча для упомянутой первой группы лучей, и изменяют расстояния между центрами сотовых ячеек для осуществления упомянутых изменений углов наведения луча; дополнительно определяют, требуются ли изменения размеров сотовых ячеек для упомянутой первой группы сотовых ячеек, изменяют малые оси сотовых ячеек для осуществления упомянутых изменений размеров сотовых ячеек, определяют, требуются ли изменения углов наведения луча для упомянутой первой группы лучей, и изменяют расстояния между фокальными точками сотовых ячеек для осуществления упомянутых изменений углов наведения луча; дополнительно идентифицируют вторую группу лучей в упомянутом множестве лучей, идентифицируют местоположение второй группы сотовых ячеек, связанных со второй группой лучей, и определяют, требуются ли изменения второй группы лучей на основании местоположения спутника и рабочего состояния первой группы лучей.
Способ-аналог имеет следующие недостатки.
1. Не обеспечивают оптимизацию группировки космических аппаратов.
2. Не максимизируют возможность доведения информации до летательного аппарата, движущегося к подвижной надводной цели.
3. Не используют имитационное моделирование для оценки эффективности всех возможных вариантов построения системы спутниковой связи в пределах допустимых значений варьируемых параметров.
Способ-аналог не позволяет определить оптимальные параметры орбит для имеющегося набора спутников связи при решении задачи наведения летательного аппарата на подвижный надводный объект с задействованием этой группировки для доведения сигналов управления.
Известен «Способ управления многолучевым покрытием зоны обслуживания в спутниковой системе с использованием спутников-ретрансляторов на высокоэллиптической орбите» (патент RU № 2522715, 2014).
Сущность данного изобретения заключается в следующем.
Способ управления многолучевым покрытием зоны обслуживания в спутниковой системе с использованием спутников-ретрансляторов на высокоэллиптической орбите, оснащенных многолучевой антенной для связи с земными станциями в течение периода нахождения спутника-ретранслятора над зоной обслуживания указанных станций, при котором на спутнике-ретрансляторе формируют многолучевое покрытие зоны обслуживания, в процессе движения спутника-ретранслятора по орбите ведут запись данных по точкам прицеливания лучей многолучевой антенны и их зонам, а также хранят данные о зоне обслуживания, отличающийся тем, что устанавливают угловой размер зоны покрытия многолучевой антенны не менее углового размера зоны обслуживания в самой широкой ее части, видимой в момент нахождения спутника-ретранслятора в начале или конце рабочего участка высокоэллиптической орбиты, поддерживают в процессе движения спутника-ретранслятора по рабочему участку высокоэллиптической орбиты направление оси центрального луча многолучевой антенны на центр зоны обслуживания, определяют в начале рабочего участка высокоэллиптической орбиты на основании хранящихся на борту спутника-ретранслятора данных по антенным лучам и зоне обслуживания активные лучи, зоны которых перекрываются с зоной обслуживания, и пассивные лучи, зоны которых не перекрываются с зоной обслуживания, подключают активные лучи к бортовой приемопередающей аппаратуре, осуществляют периодически контроль совпадения зон лучей с зоной обслуживания, по результатам указанного контроля отключают от бортовой приемопередающей аппаратуры те активные лучи, зоны которых не перекрываются с зоной обслуживания, и подключают к бортовой приемопередающей аппаратуре те пассивные лучи, зоны которых перекрываются с зоной обслуживания.
Способ-аналог имеет следующие недостатки.
1. Обеспечивают максимизацию зоны покрытия только за счет управления лучами спутников.
2. Не максимизируют качество связи для всего маршрута движения абонента.
3. Не обеспечивают оптимизацию группировки космических аппаратов.
4. Не максимизируют возможность доведения информации до летательного аппарата, движущегося к подвижной надводной цели.
5. Не используют имитационное моделирование для оценки эффективности всех возможных вариантов построения системы спутниковой связи в пределах допустимых значений варьируемых параметров.
Аналог не позволяет определить параметры спутниковой системы связи, которые будут оптимальными для сеанса связи с летательным аппаратом, движущимся к подвижной надводной цели, расположение и скорость движения которой точно не известны.
Наиболее близким по технической сущности к заявленному способу и выбранным в качестве прототипа является «Способ построения космической системы ретрансляции и связи» (патент RU №2 755019, 2021).
Сущность данного изобретения заключается в следующем.
Способ построения космической системы ретрансляции и связи, в котором информационный обмен между низкоэнергетическими земными и космическими абонентами и центральными земными станциями осуществляют через спутники-ретрансляторы на высокоэллиптических орбитах, содержащие многолучевые антенны, отличающийся тем, что в состав орбитальной группировки указанной космической системы ретрансляции и связи вводят, как минимум, два спутника-ретранслятора на геостационарной орбите, угловое разнесение между которыми устанавливают близким к 180°, каждый спутник-ретранслятор на геостационарной орбите оснащают перенацеливаемыми антеннами радиочастотного или оптического диапазона, при помощи которых осуществляют информационный обмен с высокоэнергетическими космическими абонентами, спутники-ретрансляторы на высокоэллиптической и геостационарной орбите оснащают перенацеливаемыми антеннами для связи между спутниками-ретрансляторами на высокоэллиптической и геостационарной орбитах, при помощи которых осуществляют информационный обмен между низкоэнергетическими космическими и земными абонентами и центральными земными станциями в период нахождения спутников-ретрансляторов на высокоэллиптической орбите вне зоны видимости центральных земных станций, на всех спутниках-ретрансляторах осуществляют текущий контроль пространственного положения линий связи между спутниками-ретрансляторами на высокоэллиптической и геостационарной орбитах, выбирают указанную линию связи с наименьшей протяженностью и исключают информационный обмен по ней в период ее затмения Землей или прилегающим атмосферным слоем.
Способ-прототип имеет следующие недостатки.
1. Адаптируют систему спутниковой связи под текущие условия за счет управления параметрами излучения, а не параметрами орбит.
2. Не максимизируют качество связи для всего маршрута движения абонента.
3. Не обеспечивают оптимизацию группировки космических аппаратов.
4. Не максимизируют возможность доведения информации до летательного аппарата, движущегося к подвижной надводной цели.
5. Не используют имитационное моделирование для оценки эффективности всех возможных вариантов построения системы спутниковой связи в пределах допустимых значений варьируемых параметров.
Прототип не позволяет определить параметры группировки спутниковой системы связи, которые будут оптимальными для сеанса связи с летательным аппаратом, движущимся к подвижной надводной цели, расположение и скорость движения которой точно не известны.
Технический результат предлагаемого способа заключается в максимизации интегрального коэффициента доведения информации до летательного аппарата при наведении его на подвижный надводный объект, за счет определения с помощью имитационного моделирования оптимальных параметров орбит группировки космических аппаратов связи с учетом используемой сигнально-кодовой конструкции и параметров передаваемых сообщений.
Задача, которую решает предлагаемый способ, заключается в построении оптимальной системы спутниковой связи для наведения летательного аппарата на подвижный надводный объект, при этом: задают исходные параметры группировки космических аппаратов в виде кеплеровских параметров орбит для имеющихся в распоряжении спутников связи; задают параметры передаваемых сообщений, в том числе кратность повторения сообщения, объем сообщения, скорость передачи данных и скорость помехоустойчивого кодирования; задают начальные условия моделирования группировки в виде расположения космических аппаратов в пространстве; задают место запуска летательного аппарата, траекторию его движения; задают возможное расположение и скорость движения надводного объекта; разбивают зону возможного нахождения подвижного надводного объекта на секторы с размером в зависимости от скорости движения летательного аппарата, дальности до зоны и скорости надводного объекта; перебирают методом статистических испытаний параметры группировки посредством вращения орбит космических аппаратов вокруг центра масс Земли в трех плоскостях; определяют с помощью имитационного моделирования вероятность доведения сообщения при движении летательного аппарата в каждый сектор зоны возможного нахождения надводного объекта для всех возможных углов поворота орбит группировки космических аппаратов связи; определяют интегральный коэффициент возможности доведения информации до летательного аппарата при его движении для всей зоны возможного нахождения надводного объекта как среднее арифметическое вероятностей доведения сообщения при движении в каждый сектор из зоны разбиения; выбирают вариант построения орбитальной группировки системы спутниковой связи с максимальным интегральным коэффициентом возможности доведения; формируют группировку с учетом оптимальных параметров посредством корректировки орбит космических аппаратов.
Функционирование изобретения поясняется следующими графическими материалами:
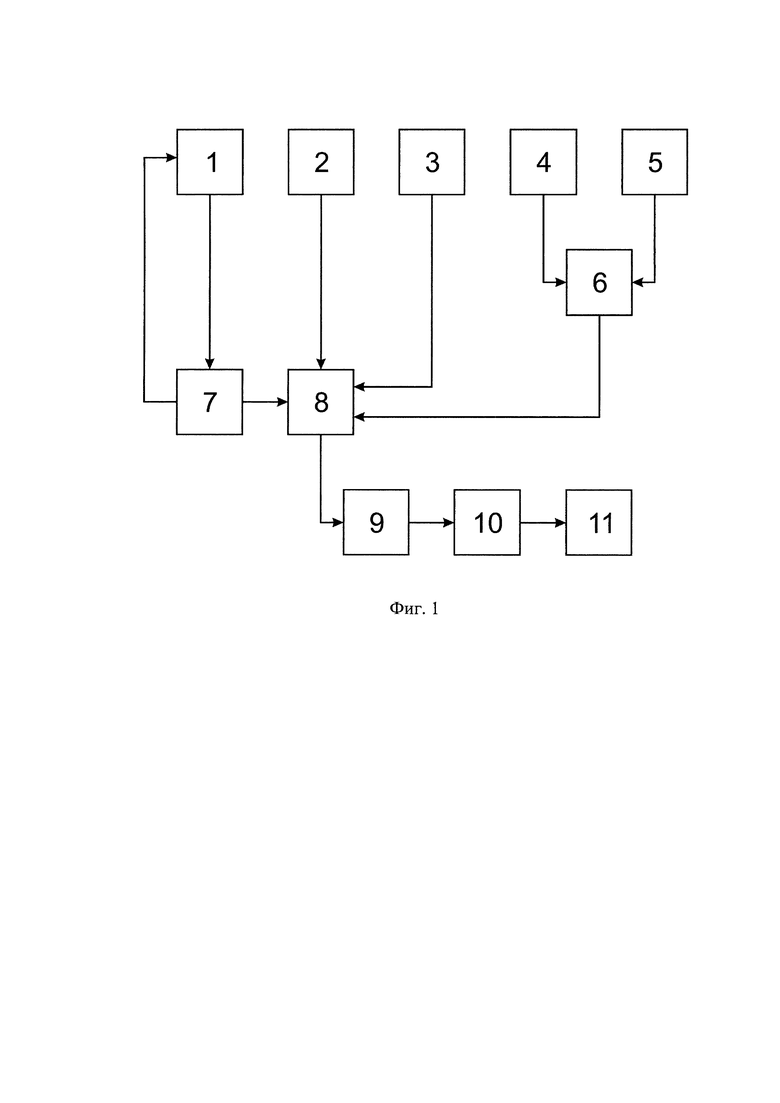
Фиг. 1 - функциональная схема способа построения оптимальной системы спутниковой связи для наведения летательного аппарата на подвижный надводный объект.
Для решения этой задачи предлагается способ построения оптимальной системы спутниковой связи для наведения летательного аппарата на подвижный надводный объект, заключающийся в том, что:
задают исходные параметры группировки космических аппаратов в виде кеплеровских параметров орбит для имеющихся в распоряжении спутников связи и вводят их в блок 1 исходных данных группировки;
задают параметры передаваемых сообщений, в том числе кратность повторения сообщения, объем сообщения, скорость передачи данных и скорость помехоустойчивого кодирования и вводят их в блок 2 исходных данных передаваемого сообщения;
задают начальные условия моделирования группировки в виде расположения космических аппаратов в пространстве и вводят их в блок 3 начальных условий моделирования;
задают место запуска летательного аппарата, траекторию его движения и вводят их в блок 4 исходных данных летательного аппарата;
задают возможное расположение и скорость движения надводного объекта и вводят их в блок 5 исходных данных надводного объекта;
передают исходные данные летательного аппарата из блока 4 и исходные данные надводного объекта из блока 5 в блок 6 разбиения возможной зоны нахождения подвижного надводного объекта на секторы;
разбивают зону возможного нахождения подвижного надводного объекта на секторы с размером в зависимости от скорости движения летательного аппарата, дальности до зоны и скорости надводного объекта в блоке 6;
передают параметры орбит для имеющихся в распоряжении спутников связи из блока 1 в блок 7 перебора параметров орбит;
перебирают параметры группировки посредством вращения орбит космических аппаратов вокруг центра масс Земли в трех плоскостях в блоке 7 перебора параметров орбит;
передают исходные данные передаваемого сообщения из блока 2, начальные условия моделирования из блока 3, параметры секторов разбиения зоны возможного нахождения подвижного надводного объекта из блока 6 и текущие параметры орбит из блока 7 в блок 8 имитационного моделирования;
определяют с помощью имитационного моделирования вероятность доведения сообщения при движении летательного аппарата в каждый сектор зоны возможного нахождения надводного объекта для всех возможных углов поворота орбит группировки космических аппаратов связи с учетом исходных данных передаваемого сообщения и начальных условий моделирования в блоке 8;
передают вероятности доведения сообщения, полученные в ходе имитационного моделирования в блок 9 определения интегрального коэффициента возможности доведения информации;
определяют интегральный коэффициент возможности доведения информации до летательного аппарата при его движении для всей зоны возможного нахождения надводного объекта как среднее арифметическое вероятностей доведения сообщения при движении в каждый сектор из зоны разбиения в блоке 9;
выбирают вариант построения орбитальной группировки системы спутниковой связи с максимальным интегральным коэффициентом возможности доведения в блоке 10 выбора оптимальных параметров группировки;
передают параметры оптимальной группировки из блока 10 в центр управления полетами 11;
формируют через центр управления полетами 11 новую группировку с учетом оптимальных параметров, либо используют имеющуюся посредством корректировки орбит космических аппаратов с использованием маневровых двигателей.
«Промышленная применимость» способа обусловлена наличием возможности реализовать элементы имитационного моделирования на штатных ЭВМ или с использованием программируемых логических интегральных схем, а также наличием технической возможности у современных и перспективных космических аппаратов изменять орбиту по командам с центра управления полетами.
Сопоставление заявленного способа построения оптимальной системы спутниковой связи для наведения летательного аппарата на подвижный надводный объект и прототипа показывает, что заявленный способ существенно отличается от прототипа.
Общие признаки заявляемого способа и прототипа
1. Используют имеющуюся группировку космических аппаратов связи и ретрансляции.
2. Обеспечивают радиосвязь с подвижными объектами.
3. Адаптируют параметры системы связи для текущих условий.
4. Обеспечивают максимум радиовидимости.
Отличительные признаки предлагаемого решения
1. Максимизируют качество связи для всего маршрута движения абонента.
2. Оптимизируют группировку космических аппаратов связи и ретрансляции.
3. Максимизируют возможность доведения информации до летательного аппарата, движущегося к подвижной надводной цели.
4. Используют имитационное моделирование для оценки эффективности всех возможных вариантов построения системы спутниковой связи в пределах допустимых значений варьируемых параметров.
5. Корректируют параметры орбит космических аппаратов связи и ретрансляции данных.
Таким образом, заявленный способ построения оптимальной системы спутниковой связи для наведения летательного аппарата на подвижный надводный объект, позволяет определить параметры спутниковой системы связи, которые будут оптимальными для сеанса связи с летательным аппаратом, движущимся к подвижной надводной цели расположение и скорость движения которой точно не известны. При этом производят максимизацию интегрального коэффициента доведения информации до летательного аппарата при наведении его на подвижный надводный объект, за счет определения с помощью имитационного моделирования оптимальных параметров орбит группировки космических аппаратов связи с учетом используемой сигнально-кодовой конструкции и параметров передаваемых сообщений.
Литература
1. Патент RU № 2265956, 2003
2. Патент RU № 2522715, 2014
3. Патент RU № 2755019, 2021
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибридная наземно-космическая система связи | 2016 |
|
RU2660559C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 2015 |
|
RU2619582C2 |
| Глобальная система спутниковой связи и передачи данных с космическими аппаратами на низкой круговой орбите | 2014 |
|
RU2614049C2 |
| СПОСОБ ПОСТРОЕНИЯ КОСМИЧЕСКОЙ СИСТЕМЫ РЕТРАНСЛЯЦИИ И СВЯЗИ | 2020 |
|
RU2755019C2 |
| РЕГИОНАЛЬНАЯ СИСТЕМА МОБИЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И ОБСЛУЖИВАНИЯ ТРАНСПОРТНЫХ КОРИДОРОВ | 2005 |
|
RU2322760C2 |
| ОПТИМИЗАЦИЯ СИСТЕМЫ С ИСПОЛЬЗОВАНИЕМ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2000 |
|
RU2265956C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОЛУЧЕВЫМ ПОКРЫТИЕМ ЗОНЫ ОБСЛУЖИВАНИЯ В СПУТНИКОВОЙ СИСТЕМЕ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА ВЫСОКОЭЛЛИПТИЧЕСКОЙ ОРБИТЕ | 2012 |
|
RU2522715C2 |
| СПУТНИК-РЕТРАНСЛЯТОР ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2020 |
|
RU2754642C1 |
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЙ В ДВУХУРОВНЕВОЙ СПУТНИКОВОЙ СИСТЕМЕ СВЯЗИ | 2023 |
|
RU2826818C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
Изобретение относится к области радиосвязи с применением спутников-ретрансляторов. Данное техническое решение в первую очередь предназначено для построения оптимальной системы спутниковой связи в интересах наведения летательного аппарата на подвижный надводный объект в условиях, когда начальное местоположение, направление и скорость движения носят случайный характер. Техническим результатом является максимизация возможности доведения информации до летательного аппарата при наведении его на подвижный надводный объект за счет определения оптимальных параметров орбит группировки космических аппаратов связи с учетом используемой сигнально-кодовой конструкции и параметров передаваемых сообщений. Упомянутый технический результат достигается тем, что производят оптимизацию орбитального построения группировки космических аппаратов посредством разбиения зоны возможного положения подвижного надводного объекта на секторы и определяют с учетом характеристик летательного аппарата, надводного объекта и передаваемых сигналов управления оптимальные параметры орбит с использованием одного из методов статистических испытаний в рамках имитационного моделирования. 1 ил.
Способ построения оптимальной системы спутниковой связи для наведения летательного аппарата на подвижный надводный объект, заключающийся в том, что задают исходные параметры группировки космических аппаратов в виде Кеплеровских параметров орбит для имеющихся в распоряжении спутников связи; задают параметры передаваемых сообщений, в том числе кратность повторения сообщения, объем сообщения, скорость передачи данных и скорость помехоустойчивого кодирования; задают начальные условия моделирования группировки в виде расположения космических аппаратов в пространстве; задают место запуска летательного аппарата и траекторию его движения; задают возможное расположение и скорость движения надводного объекта; определяют с помощью имитационного моделирования вероятность доведения сообщения при движении летательного аппарата в каждый сектор зоны возможного нахождения надводного объекта для всех возможных углов поворота орбит группировки космических аппаратов связи; формируют группировку с учетом оптимальных параметров посредством корректировки орбит космических аппаратов, отличающийся тем, что разбивают зону возможного нахождения подвижного надводного объекта на секторы с размером в зависимости от скорости движения летательного аппарата, дальности до зоны и скорости надводного объекта; перебирают параметры группировки посредством вращения орбит космических аппаратов вокруг центра масс Земли в трех плоскостях; определяют интегральный коэффициент возможности доведения информации до летательного аппарата при его движении для всей зоны возможного нахождения надводного объекта как среднее арифметическое вероятностей доведения сообщения при движении в каждый сектор из зоны разбиения; выбирают вариант построения орбитальной группировки системы спутниковой связи с максимальным интегральным коэффициентом возможности доведения.
| СПОСОБ ПОСТРОЕНИЯ КОСМИЧЕСКОЙ СИСТЕМЫ РЕТРАНСЛЯЦИИ И СВЯЗИ | 2020 |
|
RU2755019C2 |
| АГРЕГАТНЫЙ СТАНОК | 0 |
|
SU165057A1 |
| Способ формирования архитектуры орбитальной группировки космических аппаратов дистанционного зондирования Земли и информационно-аналитическая система для его осуществления | 2021 |
|
RU2753368C1 |
| Аджемов, С.С | |||
| Универсальный комплекс имитационного моделирования спутниковых систем "СатСтат" / С.С | |||
| Аджемов, А.А | |||
| Кучумов // T-Comm: Телекоммуникации и транспорт | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| - Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| - EDN KHQEGB | |||
| US 5199672 A, 06.04.1993 | |||
| US 2021311205 A1, 07.10.2021 | |||
