Изобретение относится к обеспечению связи в системах информационного обмена (СИО) с космическими аппаратами (КА) различного назначения, а именно к системам для установления связи с КА в высокоскоростных линиях связи с применением остронаправленных антенн (ОНА) и системе наведения остронаправленных антенн.
Информационный обмен с космическим аппаратом осуществляется с целью обеспечения управления полетом КА, приема целевой информации (ЦИ) и нуждается в управлении процессом установления связи между земными станциями (ЗС) и бортовой аппаратурой. В настоящее время для обеспечения высокоскоростной передачи информации от КА дистанционного зондирования Земли (ДЗЗ) в линиях связи КА-ЗС или КА-спутник-ретранслятор (СР)-ЗС на земных станциях и на спутниках-ретрансляторах применяются остронаправленные антенны, а на КА ДЗЗ установлены малонаправленные антенны (МНА). Это значительно уменьшает эффективность передачи информации, так как:
- требует значительных энергетических затрат;
- накладывает ограничение на скорость передачи информации;
- приводит к не эффективному использованию спектра частот.
Из области техники известно, что наведение остронаправленных антенн земной станции и спутника-ретранслятора на космический аппарат осуществляется по заранее рассчитанным техническим персоналом центра управления полетом (ЦУП) целеуказаниям (ЦУ).
В традиционных системах информационного обмена без применения спутников-ретрансляторов земные станции устанавливали связь с КА, только когда космический аппарат появлялся в их зоне радиовидимости (ЗРВ), что существенно уменьшало время доступности бортовой аппаратуры (БА) КА, приводило к снижению показателей оперативности и объема информации из-за невозможности равномерного распределения станций ЗС по поверхности Земного шара. Для реализации сеансов связи и управления (ССУ) дежурная смена (ДС) центра управления полетом (ЦУП) и ДС центра управления сетью (ЦУС) осуществляют заблаговременное планирование работы БА КА и ЗС, в ходе которого производится расчет целеуказаний (ЦУ) наведения остронаправленных антенных систем ЗС на КА в сеансе связи. Сформированная программа работы записывается в запоминающие устройства (ЗУ) ЗС. В ходе проведения ССУ в назначенные временные интервалы остронаправленные антенные системы ЗС осуществляют наведение и движение по заранее рассчитанным ЦУ.
С конца 80-х годов в нашей стране появилась и осваивается технология информационного обмена с КА на основе применения геостационарных спутников-ретрансляторов (ГСР), осуществляющих ретрансляцию информации между ЗС и КА, но существующие технологии установления связи по-прежнему требуют заблаговременного планирования и расчета ЦУ наведения ОНА спутника-ретранслятора, а затем, закладки программы работы и ЦУ наведения ОНА на БА спутника-ретранслятора. Это приводит к невозможности оперативной выдачи на КА командно-программной информации (КПИ) и оперативного получения ЦИ, например, от КА дистанционного зондирования Земли (ДЗЗ).
Недостаток традиционного способа установления связи с применением ОНА в существующих СИО КА заключается в следующем:
1) в отсутствии остронаправленных антенн на борту КА ДЗЗ, что приводит к большим энергетическим затратам и не экономным использованием полосы частот при передачи высокосортной ЦИ;
2) в отсутствии технологий автоматического установления связи на ОНА между ЗС и КА, между КА и CP, т.к. наведение остронаправленных антенн осуществляется по заранее рассчитанным ЦУ, что является причиной снижения оперативности информационного обмена.
Применение на космическом аппарате остронаправленных антенн при осуществлении традиционного способа установления связи приведет к дополнительным трудозатратам на предварительный расчет целеуказаний для остронаправленных антенн космического аппарата.
Основной тенденцией развития современных космических систем является появление многоспутниковых космических систем, применение в которых традиционного способа установления связи приведет к резкому росту трудозатрат технического персонала ЦУП и в конечном итоге к коллапсу СИО с КА.
Наиболее близким аналогом - прототипом, по мнению заявителя, является техническое решение, описанное в патенте на изобретение №2720856 от 07.11.2019 «Способ определения направления лазерного луча на космический аппарат, принимающий сигналы лазерной космической связи», заключающееся в том, что с передающего космического аппарата излучают лазерный сигнал в направлении принимающего космического аппарата, после регистрации этого сигнала на принимающем космическом аппарате в направлении передающего космического аппарата излучают радиосигнал, по параметрам которого в момент регистрации определяют направление лазерного луча по параметрам импульсов развертки в момент регистрации радиосигнала на передающем космическом аппарате.
Недостатками данного технического решения, описанного в патенте на изобретение (№2720856 от 07.11.2019) являются:
1) низкая точность определения направления из-за того, что сигналы принимаются на всенаправленные (или малонаправленные антенны), расположенные на одном КА и обеспечивающие, соответственно, низкую базу для проведения расчетов;
2) вследствие вышесказанного для определения направления по параметрам радиосигнала необходимо обеспечить определенную продолжительность измерений;
3) низкая точность определения направления приведет к длительной процедуре точного подстраивания ОНА и поэтому предлагаемое решение не является эффективным решением при установлении связи и поддержании связи между КА, находящимися на негеостационарных орбитах.
Предлагаемая в настоящей заявке на изобретение система направлена на решение следующих технических задач:
1) увеличение скорости передачи информации, снижение энергетических затрат БА КА и повышение эффективности использования спектра частот за счет применения ОНА в БА КА;
2) уменьшение трудозатрат на подготовку и проведение ССУ, повышение оперативности информационного обмена с КА различного назначения за счет применения технологии автоматического установления связи на основе способа автоматического взаимного наведения ОНА объектов СИО;
3) упрощение процедуры, и как следствие, уменьшение времени вхождения в связь за счет знания точных текущих координат КА, полученных либо заблаговременно, либо в процессе установления связи;
4) обеспечение возможности наведения ОНА при установлении связи и поддержания связи между КА, находящихся на негеостационарных орбитах.
Новизна предлагаемой в настоящей заявке системы заключается в том, что объекты СИО с МГ осуществляют автономный расчет начальных условий движения остронаправленных антенн и их взаимное наведение.
Техническим результатом предлагаемого изобретения является создание системы автономного наведения ОНА в линиях связи КА-ЗС и КА-СР-ЗС без участия технического персонала ЦУПа, осуществляющих предварительный расчет ЦУ наведения ОНА и планирование ССУ.
Технический результат достигается посредством того, что бортовые навигационные системы (БНС) КА и CP автономно рассчитывают параметры своего орбитального движения, в процессе установления связи обмениваются этими параметрами своего орбитального движения с применением малонаправленных (МНА) или всенаправленных (ВНА) антенных систем, а затем бортовые навигационные системы КА и CP осуществляют расчет ЦУ взаимного наведения собственных ОНА.
Технический результат достигается также за счет создания системы автономного расчета параметров орбитального движения спутниковой системы связи, содержащей по меньшей мере один космический аппарат, навигационные спутники спутниковой навигационной системы ГЛОНАСС, и одно из следующих устройств или их комбинацию: стационарная земная станция, подвижная земная станция, спутник ретранслятор, содержащей базы данных соответственно указанных выше устройств, и включающей системы управления орбитальным движением спутниковой связи.
Системы управления орбитальным движением спутниковой связи содержат по меньшей мере одну низкоскоростную абонентскую линию связи (НАЛС) и по меньшей мере одну высокоскоростную абонентскую линию связи (ВАЛС), низкоскоростная линия абонентской связи соединяет всенаправленную антенную систему бортовой аппаратуры низкоскоростной абонентской линии связи космического аппарата или спутника-ретранслятора и/или малонаправленную антенная система аппаратуры низкоскоростной абонентской линии связи стационарной или подвижной земной станции или всенаправленную антенную систему бортовой аппаратуры низкоскоростной абонентской линии связи спутника-ретранслятора, а высокоскоростная абонентская линия связи соединяет остронаправленная антенная система космического аппарата или спутника-ретранслятора с остронаправленной антенная система высокоскоростной абонентской линии связи стационарной или подвижной земной станции или спутника-ретранслятора.
В частном варианте выполнения система содержит фидерную линию связи (ФЛС), которая соединяет остронаправленную антенную систему фидерной линии связи спутника-ретранслятора и остронаправленную антенную систему фидерной линии связи стационарной земной станции.
В частном варианте выполнения стационарная земная станция включает компьютер управления (КУ) земной станции, соединенный с обратной связью с аппаратурой низкоскоростной абонентской линии связи стационарной земной станции, с навигационной системой стационарной земной станции, с системой наведения остронаправленной антенной системы высокоскоростной абонентской линии связи стационарной земной станции, с маршрутизатором стационарной земной станции, с аппаратурой высокоскоростной абонентской линии связи стационарной земной станции, с остронаправленной антенной системой высокоскоростной абонентской линии связи стационарной земной станции, маршрутизатор стационарной земной станции соединен с навигационной системой стационарной земной станции, соединенной с базой данных навигационной системы стационарной земной станции и с аппаратурой высокоскоростной абонентской линии связи стационарной земной станции, соединенной с остронаправленной антенной системой высокоскоростной абонентской линии связи стационарной земной станции, навигационная система стационарной земной станции соединена с системой наведения остронаправленной антенной системы высокоскоростной абонентской линии связи стационарной земной станции, аппаратура низкоскоростной абонентской линии связи стационарной земной станции соединена с маршрутизатором стационарной земной станции, с аппаратурой низкоскоростной абонентской линии связи стационарной земной станции соединена малонаправленная антенная система аппаратуры низкоскоростной абонентской линии связи стационарной земной станции.
В частном варианте выполнения космический аппарат включает бортовую аппаратуру низкоскоростной абонентской линии связи космического аппарата, соединенную с бортовым маршрутизатором космического аппарата и с бортовой комплекс управления космического аппарата, который соединен с бортовым маршрутизатором космического аппарата с бортовой аппаратурой высокоскоростной абонентской линии связи космического аппарата с системой наведения остронаправленной антенной системы космического аппарата и с бортовой навигационной системой космического аппарата, соединенной с базами данных бортовой навигационной системы космического аппарата и с системой наведения остронаправленной антенной системы космического аппарата, бортовой маршрутизатор космического аппарата, соединен с бортовой навигационной системой космического аппарата и с бортовой аппаратурой высокоскоростной абонентской линии связи космического аппарата, соединенной с остронаправленной антенной системой космического аппарата, соединяемая высокоскоростной абонентской линией связи с остронаправленной антенная система высокоскоростной абонентской линии связи стационарной земной станции, система наведения остронаправленной антенной системы космического аппарата, соединена с остронаправленной антенной системой космического аппарата, приемник навигационных сигналов космического аппарата, соединен с бортовой навигационной системой космического аппарата, всенаправленная антенная система приемника навигационных сигналов космического аппарата соединена с приемником навигационных сигналов космического аппарата и с навигационными спутниками спутниковой навигационной системы ГЛОНАСС.
Заявленное изобретение проиллюстрировано следующими чертежами:
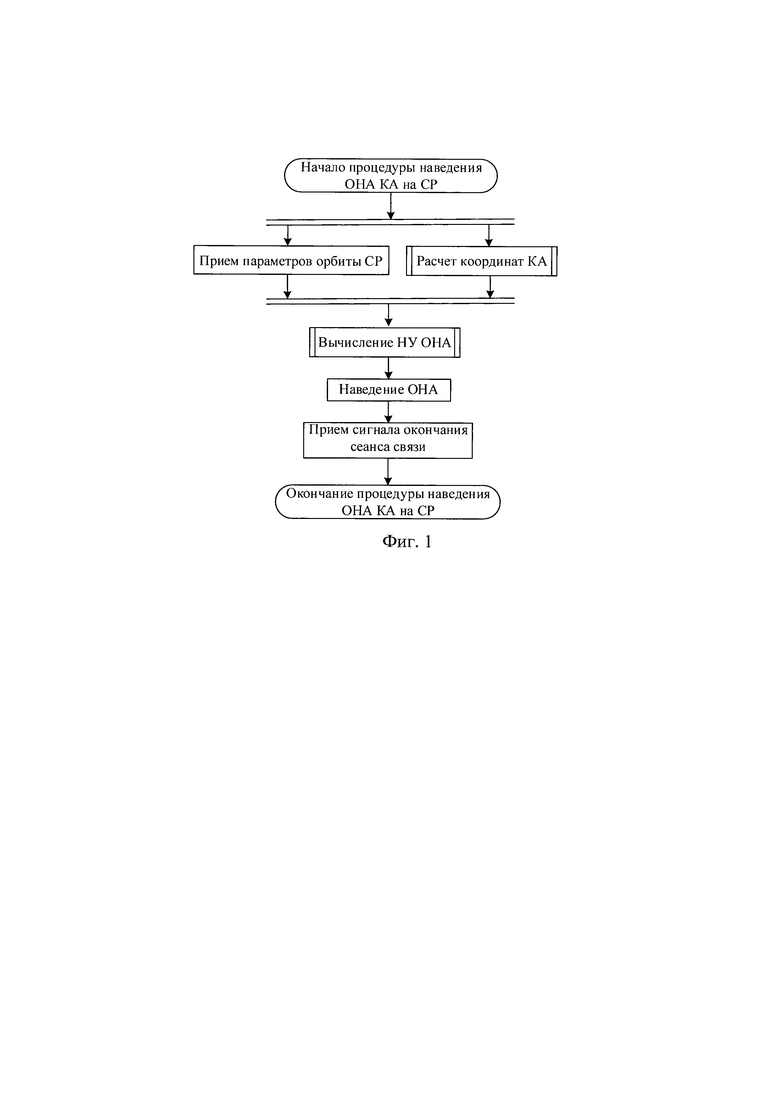
Фиг. 1 - Алгоритм установления связи космического аппарата со спутником-ретранслятором в ВАЛС с применением остронаправленных антенн;
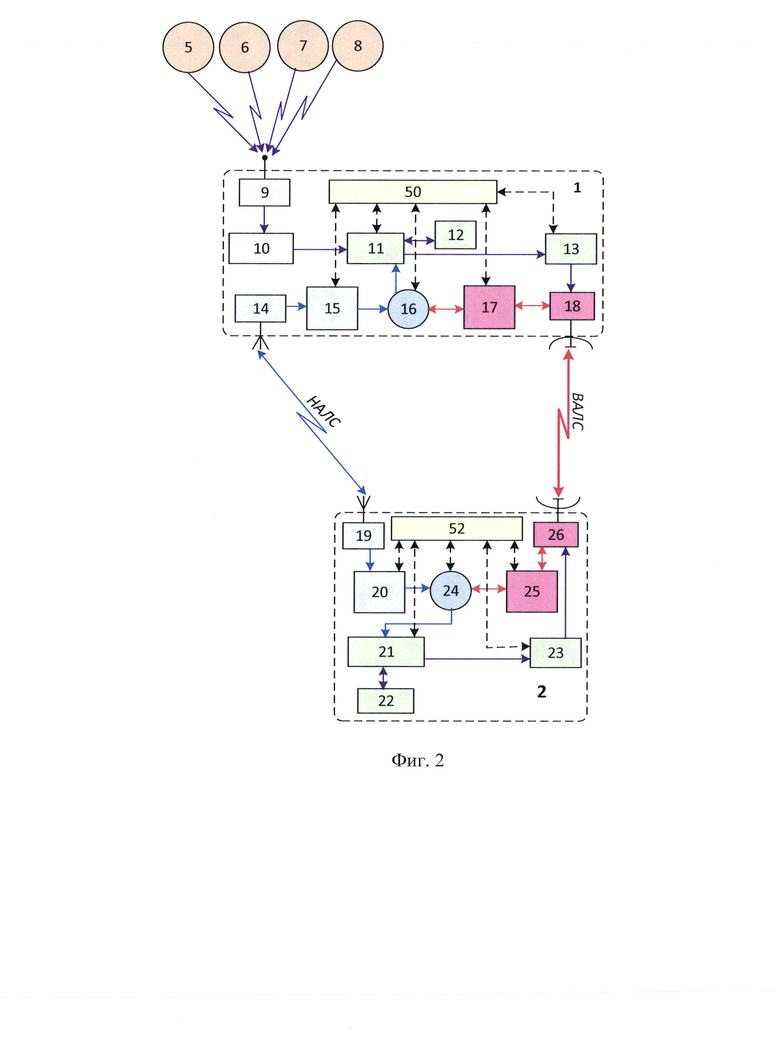
Фиг. 2 - Схема организации связи КА - стационарная земная станция (ЗС);
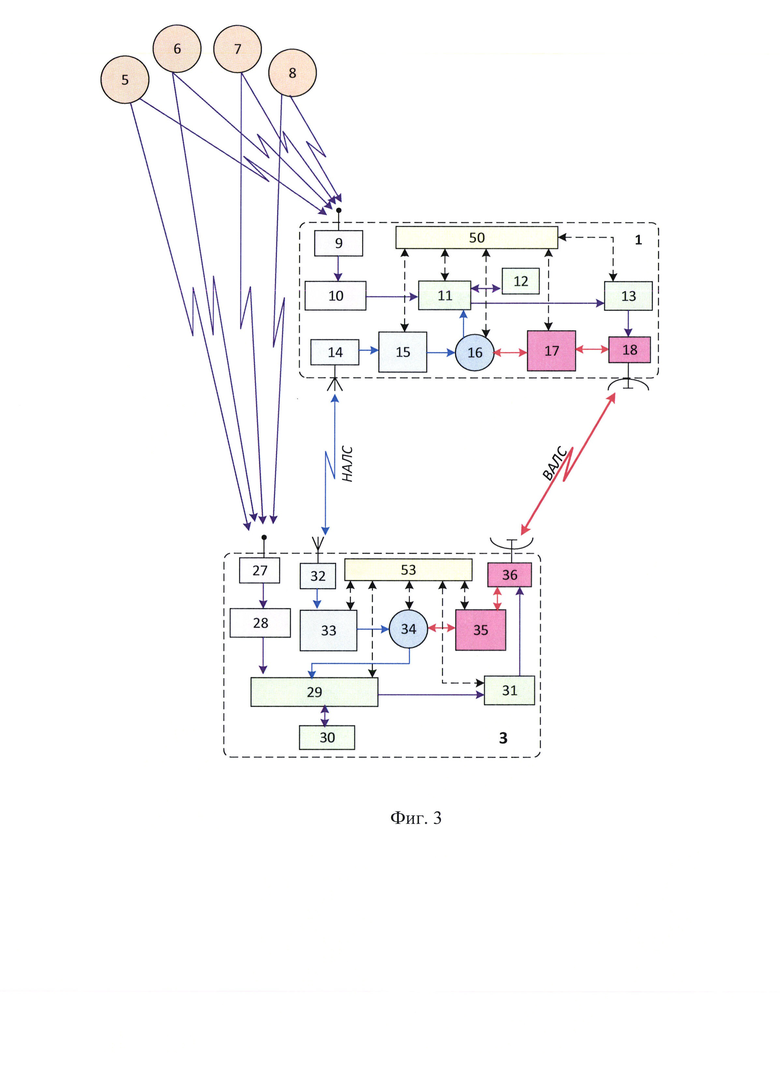
Фиг. 3 - Схема организации связи КА - подвижная земная станция (ПЗС);
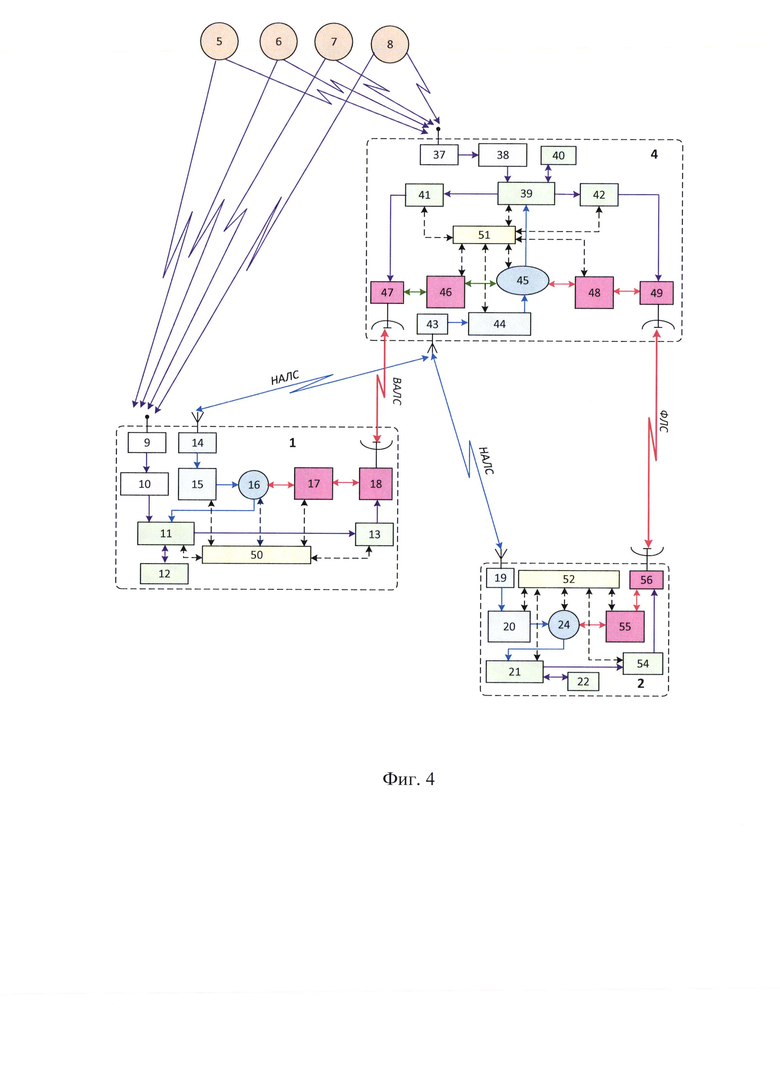
Фиг. 4 - Схема организации связи КА - CP - ЗС.
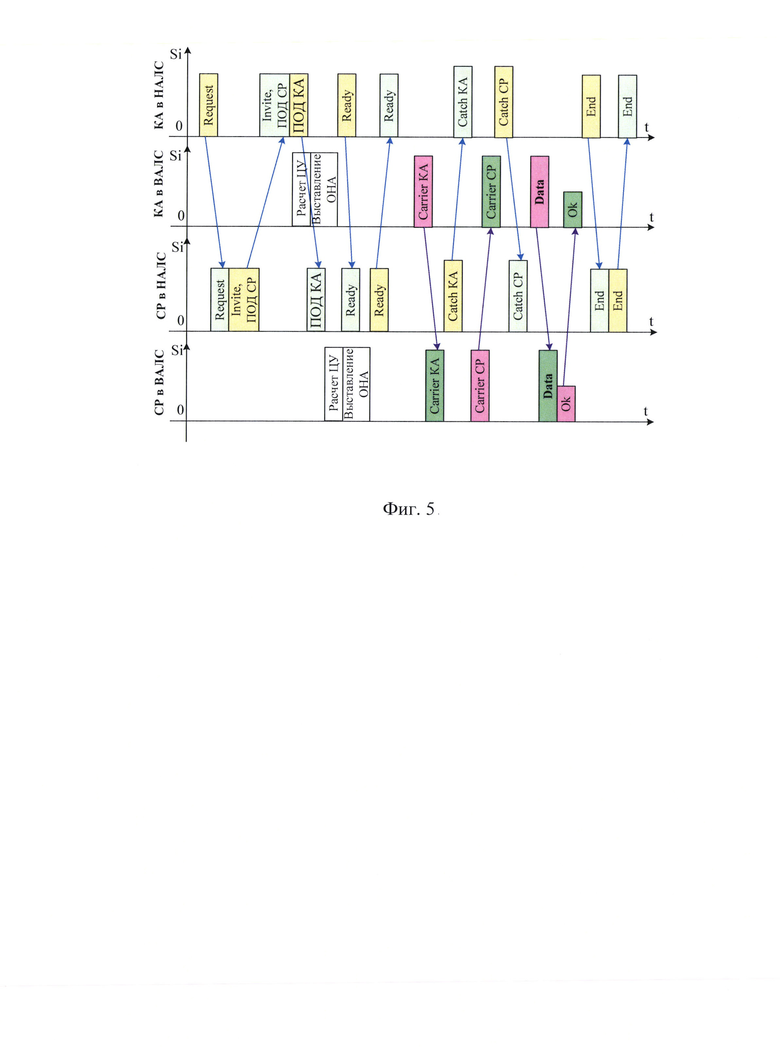
Фиг. 5 - Временная диаграмма установления связи КА с CP в ВАЛС.
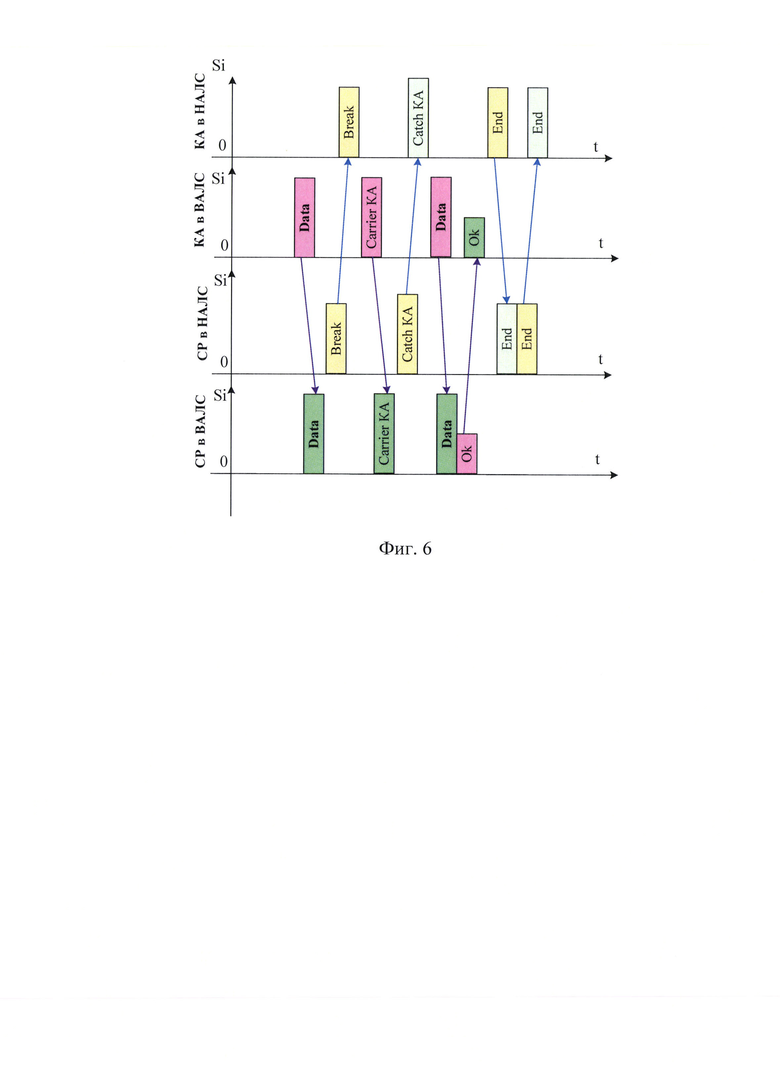
Фиг. 6 - Временная диаграмма восстановления связи КА с CP при пропадании приема сигналов в ВАЛС.
Позиции на фигурах 2-4 обозначают следующее:
1 - космический аппарат;
2 - стационарная земная станция (ЗС);
3 - подвижная земная станция (ПЗС);
4 - спутник-ретранслятор;
5, 6, 7, 8 - навигационный спутник (НС) спутниковой навигационной системы (СНС) ГЛОНАСС;
9 - всенаправленная антенная система (ВНА) приемника навигационных сигналов космического аппарата;
10 - приемник навигационных сигналов (ПНС) космического аппарата;
11 - бортовая навигационная система (БНС) космического аппарата;
12 - базы данных (БД) бортовой навигационной системы космического аппарата;
13 - система наведения остронаправленной антенной системы космического аппарата;
14 - всенаправленная антенная система бортовой аппаратуры низкоскоростной абонентской линии связи космического аппарата;
15 - бортовая аппаратура (БА) низкоскоростной абонентской линии связи (НАЛС) космического аппарата;
16 - бортовой маршрутизатор (БМ) космического аппарата;
17 - бортовая аппаратура высокоскоростной абонентской линии связи (ВАЛС) космического аппарата;
18 - остронаправленная антенная система космического аппарата;
19 - малонаправленная антенная система аппаратуры низкоскоростной абонентской линии связи стационарной земной станции;
20 - аппаратура (А) низкоскоростной абонентской линии связи стационарной земной станции;
21 - навигационная система стационарной земной станции;
22 - базы данных навигационной системы стационарной земной станции;
23 - система наведения остронаправленной антенной системы высокоскоростной абонентской линии связи стационарной земной станции;
24 - маршрутизатор (М) стационарной земной станции;
25 - аппаратура высокоскоростной абонентской линии связи стационарной земной станции;
26 - остронаправленная антенная система высокоскоростной абонентской линии связи стационарной земной станции;
27 - всенаправленная антенная система приемника навигационных сигналов подвижной земной станции;
28 - приемник навигационных сигналов подвижной земной станции;
29 - навигационная система подвижной земной станции;
30 - базы данных навигационной системы подвижной земной станции;
31 - система наведения остронаправленной антенной системы подвижной земной станции;
32 - малонаправленная антенная система аппаратуры низкоскоростной абонентской линии связи подвижной земной станции;
33 - аппаратура низкоскоростной абонентской линии связи стационарной земной станции;
34 - маршрутизатор подвижной земной станции;
35 - аппаратура высокоскоростной абонентской линии связи стационарной земной станции;
36 - остронаправленная антенная система стационарной земной станции;
37 - всенаправленная антенная система приемника навигационных сигналов спутника-ретранслятора;
38 - приемник навигационных сигналов спутника-ретранслятора;
39 - бортовая навигационная система спутника-ретранслятора;
40 - базы данных бортовой навигационной системы спутника-ретранслятора;
41 - система наведения остронаправленной антенной системы высокоскоростной абонентской линии связи спутника-ретранслятора;
42 - система наведения остронаправленной антенной системы фидерной линии связи спутника-ретранслятора;
43 - всенаправленная антенная система бортовой аппаратуры низкоскоростной абонентской линии связи спутника-ретранслятора;
44 - бортовая аппаратура низкоскоростной абонентской линии связи спутника-ретранслятора;
45 - бортовой маршрутизатор (БМ) спутника-ретранслятора;
46 - бортовая аппаратура высокоскоростной абонентской линии связи спутника-ретранслятора;
47 - остронаправленная антенная система спутника-ретранслятора;
48 - бортовая аппаратура фидерной линии связи спутника-ретранслятора;
49 - остронаправленная антенная система фидерной линии связи спутника-ретранслятора;
50 - бортовой комплекс управления (БКУ) космического аппарата;
51 - бортовой комплекс управления (БКУ) спутника-ретранслятора;
52 - компьютер управления (КУ) ЗС;
53 - компьютер управления ПЗС;
54 - система наведения остронаправленной антенной системы фидерной линии связи стационарной земной станции;
55 - аппаратура фидерной линии связи стационарной земной станции;
56 - остронаправленная антенная система фидерной линии связи стационарной земной станции.
Заявленная система работает следующим образом. Находясь в орбитальном полете, и космический аппарат 1, и спутник ретранслятор 4 постоянно вычисляют на основании принимаемых сигналов от навигационных спутников СНС ГЛОНАСС 5, 6, 7 и 8 свои координаты, на основании которых бортовая навигационная система 11 космического аппарата 1 и БНС 39 спутника ретранслятора 4 производит расчет параметров орбитального движения. Параметры орбитального движения записывается в базу данных 12 бортовой навигационная система 11 космического аппарата 1 и в базу данных 40 бортовой навигационная система 39 спутника ретранслятора 4. Запись параметров орбитального движения осуществляется в виде дискретных отчетов координат космического аппарата и спутника ретранслятора геоцентрической в гринвичской прямоугольной геоцентрической системе координат и соответствующего им текущего времени.
Частота дискретизация этих отчетов зависит от взаимных скоростей космических аппаратов и требуемой точности наведения ОНА. Требуемая точность наведения ОНА определяется значениями поддержания ориентации платформы КА и CP, а также - шириной диаграммы направленности ОНА.
Период, на который производится расчет параметров орбитального движения, зависит от требуемой точности этих параметров и может составлять от 1 витка до одних суток.
Обмен информацией о параметрах орбитального движения меду всеми КА и CP может осуществляться как непосредственно перед установлением связи, так заблаговременно периодически (например, 1 или 2 раза в сутки в зависимости от требуемой точности).
Перед установлением связи КА и CP, используя параметры орбитального движения КА и CP, вычисляют значения углов азимута γi и углов места αi для наведения своих ОНА в фиксированные отчеты времени ti на период сеанса связи, сумме представляющие собой ЦУ на сеанс связи. Частота дискретизация этих отчетов зависит от требуемой точности наведения ОНА и может составлять от 1 секунды до 10 секунд. Аналогичным образом, устанавливается связь между космическим аппаратом земной станцией, причем координаты стационарной земной станции заранее известны космическому аппарату, а координаты подвижной земной станции, осуществляющей связь с КА на стоянке, сообщаются космическому аппарату при изменении ее дислокации.
Состав устройств КА 1, задействованных в процессе установления связи с CP 4 или с ЗС 2 (см. фигуру 4 и, соответственно, см. фигуру 2):
- бортовой радиотехнический комплекс (БРТК), состоящий из: бортовой аппаратуры низкоскоростной абонентской линии связи 15 с малонаправленной антенной системой 14, бортовой аппаратуры высокоскоростной абонентской линии связи 17 с остронаправленной антенной системой 18 и системой наведения ОНА 13, бортового маршрутизатора 16 и бортового комплекса управления БРТК 50;
- бортовая навигационная система 11, состоящая из: базы данных 12, приемника навигационных сигналов 10 с всенаправленной антенной системой 9.
Состав устройств CP 4, задействованных в процессе установления связи с КА 1 (см. фигуру 4):
- бортовой радиотехнический комплекс, состоящий из: бортовой аппаратуры низкоскоростной абонентской линии связи 44 с малонаправленной антенной системой 43, бортовой аппаратуры высокоскоростной абонентской линии связи 46 с остронаправленной антенной системой 47 и системой наведения ОНА 41, бортового маршрутизатора 45 и бортового комплекса управления БРТК 51;
- бортовая навигационная система 39, состоящая из: базы данных 40, приемника навигационных сигналов 38 с всенаправленной антенной системой 37.
В процессе установления связи CP 4 с ЗС 2 вместо бортовой аппаратуры высокоскоростной абонентской линии связи 46 задействуется бортовая аппаратура фидерной линии связи 48 с остронаправленной антенной системой 49 и системой наведения ОНА 42 (см. фигуру 4).
Состав устройств стационарной земной станции 2, задействованных в процессе установления связи с КА 1 (см. фигуру 2):
- радиотехнический комплекс (РТК), состоящий из: бортовой аппаратуры низкоскоростной абонентской линии связи 20 с малонаправленной антенной системой 19, бортовой аппаратуры высокоскоростной абонентской линии связи 25 с остронаправленной антенной системой 26 и системой наведения ОНА 23, маршрутизатора 24 и компьютера управления 52.
В состав подвижной земной станции 3, кроме того входит (см. фигуру 3):
- навигационная система 29, состоящая из: базы данных 30, приемника навигационных сигналов 28 с всенаправленной антенной системой 27.
В процессе установления связи ЗС 2 с CP 4 вместо аппаратуры высокоскоростной абонентской линии связи 25 задействуется аппаратура фидерной линии связи 55 с остронаправленной антенной системой 56 и системой наведения ОНА 54 (см. фигуру 4).
В линиях связи КА-СР-ЗС и КА-ЗС высокоскоростная связь осуществляется в ВАЛС на ОНА, а низкоскоростная связь осуществляется в НАЛС на МНА. При установлении связи космического аппарата со спутником ретранслятором (или земной станцией) сперва происходит установление связи в низкоскоростной абонентском абонентской линии связи, выполняющей функции служебного канала связи.
Описанные ниже действия и на КА и на CP осуществляются аналогичным образом.
Алгоритм установления связи космического аппарата 1 со спутником-ретранслятором 4 в ВАЛС с применением остронаправленных антенн изображен на фигуре 1 и заключается в следующем.
Действие 1. При инициализации установления связи со стороны космического аппарата 1, космический аппарат формирует запрос на установление связи в ВАЛС (Request) и предоставление ресурсов борта спутника-ретранслятора 4 и отправляет его низкоскоростной абонентской линии связи на спутник-ретранслятор.
Шаг 1. БКУ 50 КА 1 формирует запрос на установление связи в ВАЛС и посылает его на БМ 16, который перенаправляет его на БА НАЛС 15. Затем запрос на установление связи в ВАЛС излучаются с ВНА 14 в НАЛС на CP 4.
Шаг 2. ВНА 43 спутника-ретранслятора 4 принимает от КА 1 в НАЛС запрос на установление связи в ВАЛС, откуда принимаемая информация поступает на БА НАЛС 44, пересылающая ее на БМ 45. БМ 45 перенаправляет запрос на установление связи в ВАЛС на БКУ БРТК 51, принимающий решение об установлении связи с КА1 в ВАЛС.
Действие 2. В случае положительного решения спутника-ретранслятора о предоставлении ресурсов борта космическому аппарату спутник-ретранслятор 4 высылает космическому аппарату 1 разрешение на установление связи и параметры орбитального движения. КА 1, получив от CP 4 разрешение на установление связи и параметры орбитального движения, в ответ передает на CP свои параметры орбитального движения.
Шаг 1. Разрешение на установление связи с КА формирует бортовой комплекс управления 51 БРТК CP, которое поступает на бортовой маршрутизатор 45, направляющий его на БА НАЛС 44. Одновременно с этим, бортовой комплекс управления 51 БРТК CP формирует и передает команду управления «Отправить ПОД на КА» на БНС 39 CP, которая извлекает из БД 42 параметры орбитального движения CP и посылает их на БМ 45, направляющий ПОД CP на БА НАЛС 44. Затем разрешение на установление связи и параметры орбитального движения CP излучаются с ВНА 43 в НАЛС на КА 1.
Шаг 2. ВНА 14 КА 1 принимает разрешение на установление связи и параметры орбитального движения CP в НАЛС от CP 4, передает их на БА НАЛС 15. С БА НАЛС 15 принятая от CP информация поступает на БМ 16, откуда она передается на БНС 11.
Примечание: при получении отрицательного решения спутника-ретранслятора о предоставлении ресурсов борта космическому аппарату, КА 1 инициализации установления связи с другим СР.
Шаг 3. Бортовой комплекс управления 50 БРТК КА формирует и передает команду управления «Отправить ПОД на КА» на БНС 11, которая извлекает из БД 12 параметры орбитального движения КА и посылает их на БМ 16, направляющий ПОД КА на БА НАЛС 15. Затем, параметры орбитального движения КА излучаются с ВНА 14 в НАЛС на CP 4.
Шаг 4. ВНА 43 CP 4 принимает параметры орбитального движения КА в НАЛС от КА 1, передает их на БА НАЛС 44. С БА НАЛС 44 принятая от КА информация поступает на БМ 45, откуда она передается на БНС 39.
Действие 3. Осуществление процедуры расчета параметров наведения ОНА.
Шаг 1. После получения бортовой навигационной системой 11 КА 1 параметров орбиты спутника-ретранслятора, она осуществляет вычисление параметров наведения остронаправленной антенны на спутник-ретранслятор (т.е. целеуказаний) с учетом параметров движения CP и параметров свой своей орбиты. Расчет целеуказаний происходит на временной период, соответствующий временному периоду полученных параметров орбиты.
Шаг 2. Аналогичным образом, после получения бортовой навигационной системой 39 CP 4 параметров орбиты космического аппарата, она осуществляет вычисление параметров наведения остронаправленной антенны на космический аппарат с учетом параметров движения КА и параметров свой своей орбиты. Расчет целеуказаний так же происходит на временной период, соответствующий временному периоду полученных параметров орбиты.
Действие 4. Выставление остронаправленных антенн КА 1 и CP 4 в начальные точки целеуказаний и начало их движения по программе.
Шаг 4. По завершении расчетов ЦУ бортовая навигационная система 11 КА 1 передает их на систему наведения ОНА 13, которая формирует команду управления для выставления остронаправленной антенны 18 в начальную точку целеуказаний. Сразу, после установки ОНА 18 в начальную точку целеуказаний, происходит движение антенной системы по заданной программе.
Шаг 4. Аналогичным образом, после завершения расчетов ЦУ бортовая навигационная система 39 CP 4 передает их на систему наведения ОНА 41, которая формирует команду управления для выставления остронаправленной антенны 47 в начальную точку целеуказаний. Сразу, после установки ОНА 47 в начальную точку целеуказаний, происходит движение антенной системы по заданной программе.
Действие 5. Формирование докладов о готовности к работе в ВАЛС.
Шаг 1. После выставления ОНА 18 КА 1 в начальную точку целеуказаний система наведения ОНА 13 отправляет отчет об этом событии на БКУ 50, который формирует и передает команду на включение БА ВАЛС 17. Также БКУ 50 КА 1 формирует доклад о готовности (Ready) к работе в ВАЛС, пересылает его на БМ 16, перенаправляющий его на БА НАЛС 15. Затем, доклад о готовности с МНА 14 излучается на CP 4.
Шаг 2. ВНА 43 CP 4 принимает от КА 1 доклад о готовности к работе в ВАЛС, передает его на БА 44, откуда доклад о готовности к работе в ВАЛС поступает на БМ 45, перенаправляющий его на БКУ БРТК 51.
Шаг 3. После выставления ОНА 47 CP 4 в начальную точку целеуказаний система наведения ОНА 47 отправляет отчет об этом событии на БКУ 51, который формирует и передает команду включения на БА ВАЛС 46 и команду о начале наведения на СН 41. Также БКУ 51 CP 4 формирует доклад о готовности (Ready) к работе в ВАЛС, пересылает его на БМ 45, перенаправляющий его на БА НАЛС 44. Затем доклад о готовности с МНА 43 излучается на КА 1.
Действие 6. КА 1 излучает несущую на CP 4 в ВАЛС.
Шаг 1. ВНА 14 КА 1 принимает доклад о готовности к работе в ВАЛС от CP 4, передает их на БА НАЛС 15. С БА НАЛС 15 принятая от CP информация поступает на БМ 16, откуда она передается на БКУ 50, который формирует и передает команду управления «Включить несущую» на БА ВАЛС 17, вследствие чего БА ВАЛС 17 формирует несущую на частоте передачи сигнала маяка (Carrier КА) и излучает ее с ОНА 18 в ВАЛС.
Шаг 2. ОНА 47 CP 4 приступает к процедуре обнаружения излучаемого от КА 1 сигнала, которая заключается в движении антенны по спирали от большего диаметра спирали к меньшему. Первоначальный диаметр спирали определяются конструктивными параметрами точности системы наведения. Принимая эту несущую от КА, по критерию максимального уровня принимаемого сигнала систему наведения 41 производит автоподстройку антенной системы на КА 1. Процедура автоподстройки антенной системы осуществляется на протяжении всего сеанса связи.
Шаг 3. После приема несущей от КА 1 в высокоскоростной абонентской линии связи, система наведения антенной системы 47 CP 4 формирует и посылает на БКУ 51 доклад о захвате несущей КА в ВАЛС (Catch КА), который ретранслирует его на БМ 51. С БМ 51 доклад о захвате несущей КА поступает на БА НАЛС 44 и в последствии излучается с МНА 43 на КА 1.
Действие 7. CP 4 излучает несущую на КА 1 в ВАЛС.
Шаг 1. ВНА 14 КА 1 принимает доклад о готовности о захвате несущей КА в ВАЛС от CP 4, передает его на БА НАЛС 15. С БА НАЛС 15 принятая от CP информация поступает на БМ 16, откуда она передается на БКУ 50.
Шаг 2. БКУ 51 CP 4 формирует и посылает на БА ВАЛС 46 команду об излучении несущей на КА 1, вследствие чего БА ВАЛС 46 формирует несущую на частоте передачи сигнала маяка (Carrier CP) и излучает ее с ОНА 47 в ВАЛС.
Шаг 3. ОНА 18 КА 1 приступает к процедуре обнаружения излучаемого от CP 4 сигнала, которая заключается в движении антенны по спирали от большего диаметра спирали к меньшему. Первоначальный диаметр спирали определяются конструктивными параметрами точности системы наведения. Принимая эту несущую от CP, по критерию максимального уровня принимаемого сигнала систему наведения 13 производит автоподстройку антенной системы на CP 1. Процедура автоподстройки антенной системы осуществляется на протяжении всего сеанса связи.
Шаг 3. После приема несущей от CP 4 в высокоскоростной абонентской линии связи, система наведения антенной системы 13 КА 1 формирует и посылает на БКУ 50 доклад о захвате несущей CP в ВАЛС (Catch CP), который ретранслирует его на БМ 50. С БМ 50 доклад о захвате несущей CP поступает на БА НАЛС 15 и в последствии излучается с МНА 14 на СР1.
Действие 8. Осуществление информационного обмена КА 1 с CP 4 в ВАЛС.
Шаг 1. Целевая информация (ЦИ) от целевой аппаратуры КА поступает на БМ 16, перенаправляющий ее на БА ВАЛС 17, которая излучает ее с ОНА 18 в ВАЛС.
Шаг 2. Целевая информация принимается на ОНА 47, направляется на БА ВАЛС 46, посылающая ее на БМ 45. БМ 45 перенаправляет целевую информацию на целевой аппаратуру СР.
Примечание: время сеанса связи определяется необходимостью передачи заданного объема информации, а также, продолжительностью установленного сеанса связи в зависимости от параметров орбитального движения.
Действие 8. Пропадание приема сигналов в ВАЛС в ходе проведения сеанса связи (см. фиг. 6).
Шаг 1. При пропадании приема сигналов в ВАЛС в ходе проведения сеанса связи до получения команды завершить сеанса связи (End) система наведения ОНА 47 формирует и посылает на БКУ 51 сообщение о пропадании приема сигналов в ВАЛС (Break), который ретранслирует его на БМ 45. С БМ 45 сообщение о пропадании приема сигналов в ВАЛС поступает на БА НАЛС 44 и затем излучается с МНА 43 на КА 1.
Шаг 2. ВНА 14 КА 1 принимает сообщение о пропадании приема сигналов в ВАЛС от CP 4, передает его на БА НАЛС 15. С БА НАЛС 15 принятая от CP информация поступает на БМ 16, откуда она передается на БКУ 50. БКУ 50 формирует и передает на БА ВАЛС 46 и на целевую аппаратуру команду о прекращении передачи. После чего, БА ВАЛС 46 переходит в режим излучения несущей, и процедура установления связи повторяется описанным выше образом (см. действия 6 и 7).
После восстановления связи в ВАЛС возобновляется передача ЦИ.
Завершения сеанса связи может наступить по причине завершения передачи заданного объема информации или по причине окончания взаимной зоны радиовидимости.
Действие 9. Завершение сеанса связи в случае завершения передачи заданного объема информации
Шаг 1. Целевая аппаратура формирует и посылает на БКУ 50 КА 1 сообщение о завершении передачи заданного объема информации, который формирует и посылает сообщение о завершении сеанса связи (End) на БМ 16. С БМ 16 сообщение о завершении сеанса связи поступает на БА НАЛС 15 и с МНА 14 излучается на CP 4.
Шаг 2. ВНА 43 CP 4 принимает сообщение о завершении сеанса связи от КА 1, передает его на БА НАЛС 44. С БА НАЛС 44 принятая от КА информация поступает на БМ 45, откуда она передается на БКУ 51, который формирует и передает команду о выключении на БА ВАЛС 46 и на СН 41.
Действие 10. Завершение сеанса связи по причине окончания взаимной зоны радиовидимости.
СН 13 формирует и посылает на БКУ 50 КА 1 сообщение о окончании взаимной зоны радиовидимости, который формирует и посылает на БА ВАЛС 17 и на целевую аппаратуру команду об окончании передачи. Кроме того, БКУ 50 посылает сообщение о завершении сеанса связи (End) на БМ 16, а с БМ 16 сообщение о завершении сеанса связи поступает на БА НАЛС 15 и с МНА 14 излучается на CP 4.
Шаг 2. ВНА 43 CP 4 принимает сообщение о завершении сеанса связи от КА 1, передает его на БА НАЛС 44. С БА НАЛС 44 принятая от КА информация поступает на БМ 45, откуда она передается на БКУ 51, который формирует и передает команду о выключении на БА ВАЛС 46 и на СН 41.
Аналогичным образом осуществляется установление связи в ВАЛС с применением остронаправленных антенн в следующих случаях:
- спутника-ретранслятора 4 с космическим аппаратом 1;
- космического аппарата 1 с земной станцией 2 или с подвижной земной станцией 3;
- стационарной земной станцией 2 или подвижной земной станцией 3 с космическим аппаратом 1;
- спутника-ретранслятора 4 со стационарной земной станцией 2 или с подвижной земной станцией 3;
- стационарной земной станцией 2 или подвижной земной станцией 3 со спутником-ретранслятором 4.
Примечания:
1) Особенность установления связи с подвижной земной станцией 2 заключается в том, что при установлении связи с CP или с КА подвижная земная станция сообщает о своем местонахождении, а если находиться в движении - то сообщает и параметрах своего движения.
2) Особенность установления связи со стационарной земной станцией 2 заключается в том, что при установлении связи с CP или с КА стационарная земная станция не сообщает о своем местонахождении, т.к. оно заранее известно и находится в БД БНС.
3) Особенность установления связи спутника-ретранслятора 4 со стационарной земной станцией 2 или с подвижной земной станцией 3 заключается в том, что высокоскоростная связь осуществляется не в ВАЛС в фидерной линии связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система персональной подвижной спутниковой связи на основе сети низкоорбитальных спутников-ретрансляторов, обеспечивающая предоставление доступа в сеть Internet с носимого персонального абонентского терминала | 2021 |
|
RU2754947C1 |
| Способ выбора космическим аппаратом земной станции для установления высокоскоростной связи на остронаправленных антенных системах в диапазонах, радиопрозрачность которых зависит от состояния атмосферы | 2023 |
|
RU2822689C1 |
| СПОСОБ И СИСТЕМА ЗАЩИТЫ ИНФОРМАЦИИ ПРИ ОРГАНИЗАЦИИ ИНФОРМАЦИОННОГО ОБМЕНА С КОСМИЧЕСКИМИ АППАРАТАМИ | 2022 |
|
RU2795117C1 |
| Система управления полетом космического аппарата с применением в качестве ретрансляторов низкоорбитальных спутников, связанных между собой межспутниковыми линиями связи | 2019 |
|
RU2713293C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА РЕТРАНСЛЯЦИИ ДЛЯ ИНФОРМАЦИОННОГО ОБМЕНА С КОСМИЧЕСКИМИ И НАЗЕМНЫМИ АБОНЕНТАМИ | 2011 |
|
RU2503127C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОЛУЧЕВЫМ ПОКРЫТИЕМ ЗОНЫ ОБСЛУЖИВАНИЯ В СПУТНИКОВОЙ СИСТЕМЕ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА ВЫСОКОЭЛЛИПТИЧЕСКОЙ ОРБИТЕ | 2012 |
|
RU2522715C2 |
| Способ управления полетом низкоорбитального космического аппарата через навигационные космические аппараты системы ГЛОНАСС с применением резервного канала передачи с кодовым разделением командно-программной информации | 2022 |
|
RU2800530C1 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ ДЛЯ НАБЛЮДЕНИЯ ЗА ПОДВИЖНЫМИ И СТАЦИОНАРНЫМИ ОБЪЕКТАМИ, ПЕРЕДАЧИ ТЕЛЕФОННЫХ СООБЩЕНИЙ И ДАННЫХ | 2003 |
|
RU2253946C2 |
| СПОСОБ УСТАНОВЛЕНИЯ СВЯЗИ С НИЗКООРБИТАЛЬНЫМИ КОСМИЧЕСКИМИ АППАРАТАМИ В КОСМИЧЕСКОЙ СИСТЕМЕ РЕТРАНСЛЯЦИИ | 2007 |
|
RU2344547C1 |
| Гибридная наземно-космическая система связи | 2016 |
|
RU2660559C2 |
Изобретение относится к обеспечению связи в системах информационного обмена (СИО) с космическими аппаратами (КА) различного назначения, а именно к системам для установления связи с КА в высокоскоростных линиях связи с применением остронаправленных антенн (ОНА) и системе наведения остронаправленных антенн. Техническим результатом изобретения является обеспечение автономного наведения ОНА в линиях связи КА-земная станция (ЗС) и КА-спутник-ретранслятор(СР)-ЗС без участия технического персонала центра управления полетом (ЦУПа), осуществляющих предварительный расчет целеуказаниий (ЦУ) наведения ОНА и планирование сеансов связи и управления (ССУ). Технический результат достигается за счет создания системы автономного расчета параметров орбитального движения спутниковой системы связи, содержащей по меньшей мере один КА, навигационные спутники спутниковой навигационной системы ГЛОНАСС, спутник-ретранслятор, стационарную и/или подвижную земную станцию, и включающей системы управления орбитальным движением космических аппаратов спутниковой связи, содержащие по меньшей мере одну низкоскоростную абонентскую линию связи, по меньшей мере одну высокоскоростную абонентскую линию связи и/или фидерную линию связи. 6 ил.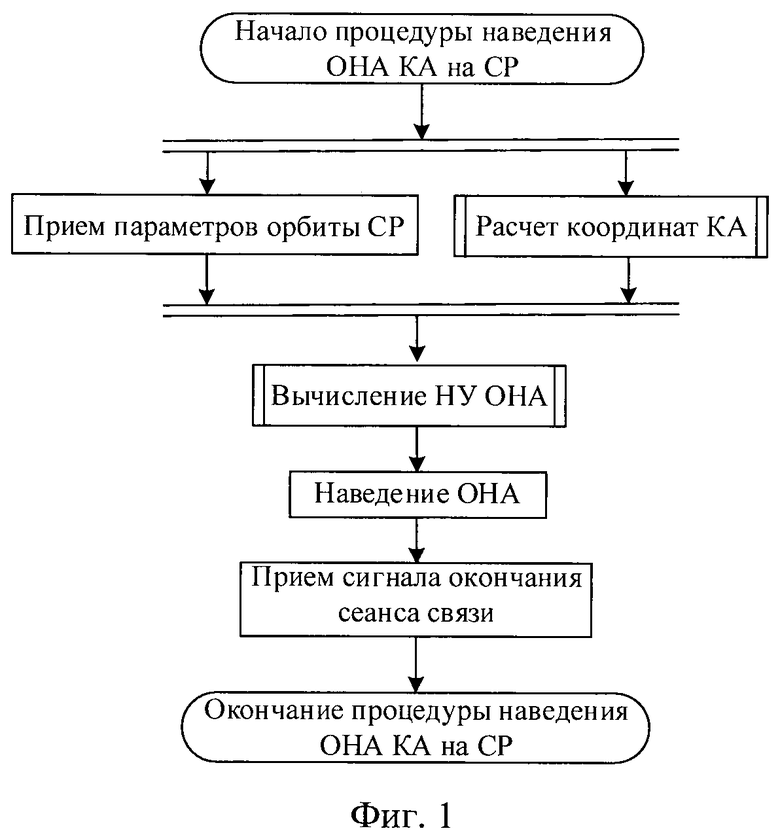
Система высокоскоростной связи с космическими аппаратами с использованием автоматического взаимного наведения остронаправленных антенн, содержащая навигационные спутники спутниковой системы ГЛОНАСС, по меньшей мере один космический аппарат, спутник-ретранслятор, стационарную и/или подвижную земную станцию, и включающая системы управления орбитальным движением космических аппаратов спутниковой связи, отличающаяся тем, что системы управления орбитальным движением космических аппаратов спутниковой связи содержат по меньшей мере одну низкоскоростную абонентскую линию связи, по меньшей мере одну высокоскоростную абонентскую линию связи и/или фидерную линию связи; при этом низкоскоростная линия абонентской связи соединяет:
всенаправленную антенную систему бортовой аппаратуры низкоскоростной абонентской линии связи космического аппарата с малонаправленной антенной системой аппаратуры низкоскоростной абонентской линии связи стационарной земной станции и всенаправленную антенную систему бортовой аппаратуры низкоскоростной абонентской линии связи космического аппарата с всенаправленной антенной системой бортовой аппаратуры низкоскоростной абонентской линии связи спутника-ретранслятора и всенаправленную антенную систему бортовой аппаратуры низкоскоростной абонентской линии связи спутника-ретранслятора с малонаправленной антенной системой аппаратуры низкоскоростной абонентской линии связи стационарной земной станции;
высокоскоростная абонентская линия связи соединяет остронаправленную антенную систему космического аппарата с остронаправленной антенной системой высокоскоростной абонентской линии связи стационарной и/или подвижной земной станции и с остронаправленной антенной системой спутника-ретранслятора;
фидерная линия связи соединяет остронаправленную антенную систему спутника-ретранслятора с остронаправленной антенной системой фидерной линии связи стационарной и/или подвижной земной станции;
причем каждый из космического аппарата, спутника-ретранслятора, стационарной и/или подвижной земной станции содержит базу данных, бортовую навигационную систему, бортовую аппаратуру низкоскоростной абонентской линии связи, бортовой маршрутизатор, бортовой комплекс управления, систему наведения остронаправленной антенной системы, а стационарная и подвижная земная станции содержат также аппаратуру фидерной линии связи с остронаправленной антенной системой.
| CN109742541 A, 10.05.2019 | |||
| US10483629 B1, 19.11.2019 | |||
| US9376221 B1, 28.06.2016 | |||
| US6504502 B1, 07.01.2003 | |||
| Сортировка для мусора | 1938 |
|
SU57517A1 |
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| US9906291 B1, 27.02.2018. | |||
