Изобретение относится к области приборостроения, а именно к инерционным датчикам порогового действия.
Инерционные датчики порогового действия устанавливаются, как правило, на движущихся объектах для контроля за достижением ускорениями, действующими на объект при столкновении с другими объектами, например при транспортных авариях, пороговых уровней.
Известны инерционные датчики порогового действия (см. патент США №4789762, кл. Н01Н 35/14, опубл. в 1988 г., авторское свидетельство №922906, кл. Н01Н 35/14, опубл. в БИ №15 в 1982 г.), у которых чувствительный элемент представляет собой инерционное тело, установленное на винтовой пружине в корпусе датчика. При этом на инерционном теле датчика размещается подвижный электрический контакт, а на корпусе датчика - неподвижный электрический контакт. Винтовая пружина является упругим элементом, обеспечивающим начальное усилие поджатия инерционного тела к корпусу датчика. Величина отношения начального усилия поджатия к массе инерционного тела определяет величину порога по ускорению срабатывания датчика. При действии на датчик ускорения возникает сила инерции, которая стремится переместить инерционное тело в том случае, когда ее величина превышает начальное усилие поджатия пружины. При перемещении инерционного тела на величину межконтактного зазора происходит замыкание электрического контакта. Замыкание электрического контакта используется в качестве сигнала о достижении ускорением порогового значения.
Недостатком аналога (патент США №4789762) является ненадежная гальваническая связь между токовыводом и подвижным электрическим контактом вследствие того, что токоподвод к подвижному электрическому контакту, являющемуся одновременно инерционным телом, осуществляется через корпус и (или) винтовую пружину. Кроме того, в связи с тем, что корпус датчика является токопроводом, то при необходимости электрической изоляции корпуса датчика от места его установки изоляционный материал будет искажать входной сигнал (импульс ударного ускорения), передаваемый чувствительному элементу датчика.
Общие недостатки аналогов заключаются в следующем. Размещение токовыводов на противоположных торцах корпуса датчика приводит к тому, что при установке датчика необходимо предусматривать в поверхности, на которую он устанавливается, места для размещения токовыводов, что усложняет как крепление датчика, так и размещение электрических проводов, идущих от датчика. Наличие неподвижного электрического контакта в зоне размещения опорной поверхности рабочей пружины усложняет или делает невозможным установку регулировочного устройства, изменяющего степень сжатия пружины и позволяющего более точно настраивать датчик на необходимый порог по ускорению срабатывания.
Прототипом предлагаемого технического решения является инерционный датчик, описанный в патенте DE №2826306 С3, кл. Н01Н 35/14, опубл. в 1982 г.
Датчик содержит размещенное в корпусе с упором инерционное тело, поджатое рабочей пружиной к одной стороне упора. На другой стороне упора расположены два неподвижных контакта, имеющих форму полуколец. Неподвижные контакты электрически изолированы от корпуса датчика и соединены с токовыводами. При этом оба токовывода расположены со стороны одной торцевой поверхности корпуса датчика. Инерционное тело имеет хвостовую часть, к которой поджат пружиной подвижный контакт в виде тонкостенной втулки. Подвижный контакт обеспечивает перемыкание неподвижных контактов при перемещении инерционного тела на величину межконтактного зазора.
Основной недостаток прототипа состоит в ненадежном перемыкании двух неподвижных электрических контактов подвижным контактом - втулкой, так как разместить рабочие поверхности двух электрических контактов на одном уровне технологически очень сложно. Поэтому касание втулкой обоих электрических контактов при перемещении инерционного тела на величину межконтактного зазора - расстояния между неподвижными контактами и втулкой - будет происходить неодновременно и для надежного перемыкания контактов требуются дополнительное поджатие пружиной втулки к неподвижным контактам и нежесткое соединение втулки с инерционным телом для обеспечения возможного поворота, необходимого для касания втулкой обеих поверхностей неподвижных контактов.
Наличие пружины, поджимающей втулку к хвостовой части инерционного тела, а затем к неподвижным контактам при перемещении инерционного тела на величину межконтактного зазора, существенно снижает надежность датчика. Это связано с тем, что направление силы поджатия противоположно направлению восстанавливающей силы рабочей пружины, поэтому при поломке рабочей пружины втулка, перемещаясь под действием пружины, перемкнет контакты, и датчик выдаст ложный сигнал о срабатывании при отсутствии ускорения, действующего на датчик.
Кроме того, для обеспечения более широкой диаграммы чувствительности датчика необходимо, чтобы инерционное тело дополнительно имело возможность поворота относительно оси датчика. При этом втулка будет касаться только одного контакта и перемыкания неподвижных электрических контактов не произойдет.
Задача, на решение которой направлено заявляемое техническое решение, заключается в создании датчика, имеющего повышенную надежность.
Технические результаты, получаемые при осуществлении изобретения, заключаются в повышении надежности замыкания электрического контакта и отсутствии самопроизвольного срабатывания датчика при поломке рабочей пружины.
Эти технические результаты получены за счет того, что в инерционном датчике, содержащем размещенное в корпусе с упором инерционное тело, поджатое к одной стороне упора и снабженное со стороны опорной поверхности хвостовой частью, контактную систему, включающую неподвижный контакт, размещенный на другой стороне упора, подвижный контакт и токовыводы, расположенные со стороны хвостовой части инерционного тела, новым является то, что неподвижный контакт выполнен в виде кольца, соединенного с одним из токовыводов, а подвижный контакт закреплен на хвостовой части инерционного тела и соединен гибким токопроводом с другим токовыводом.
Выполнение неподвижного электрического контакта в виде кольца, соединение его с одним токовыводом и закрепление подвижного электрического контакта на хвостовой части инерционного тела позволяет обеспечить надежное замыкание электрического контакта при любом виде перемещения инерционного тела.
Благодаря тому, что подвижный контакт, закрепленный на хвостовой части инерционного тела, соединен с токовыводом гибким токопроводом, выполненным, например, в виде винтовой пружины, повышается надежность датчика, так как указанная пружина, работая в исходном состоянии на растяжение, обеспечивает дополнительное усилие поджатия инерционного тела к упору. При этом параметры пружин выбираются из условия - рабочая пружина обеспечивает 60-80% суммарного усилия поджатия, необходимого для обеспечения требуемого порога по ускорению срабатывания, а пружина-токоподвод, соответственно, - остальные 20-40%. Поэтому в случае поломки рабочей пружины пружина-токоподвод не даст переместиться инерционному телу и замкнуться электрическому контакту при отсутствии инерционных нагрузок. То есть самопроизвольного срабатывания датчика не произойдет.
На приведенном чертеже изображена конструктивная схема датчика.
Датчик состоит из корпуса 1, инерционного тела 2, поджатого рабочей пружиной 3 к упору в корпусе. Пружина 3 опирается на регулировочный винт 6. На противоположной стороне упора расположен неподвижный электрический контакт 4 в виде кольца, который электрически изолирован от корпуса 1 датчика. Неподвижный электрический контакт 4 соединен с одним из двух токовыводов 7, расположенных со стороны одной торцевой поверхности корпуса 1 датчика. Подвижный электрический контакт 5 закреплен на хвостовой части инерционного тела 2. Подвижный контакт 5 связан с другим токовыводом 7 гибким токопроводом, например, в виде конической винтовой пружины 8.
Электрические контакты 4 и 5 могут иметь разнообразную форму поперечного сечения, но их форма и диаметры должны быть подобраны таким образом, чтобы при любом перемещении инерционного тела, включая поворот относительно оси датчика, происходило их контактирование, то есть замыкание электрического контакта.
Для точной регулировки межконтактного зазора подвижный контакт 5 имеет с хвостовой частью инерционного тела 2 резьбовое соединение. После выставления необходимого межконтактного зазора контакт 5 закрепляется неподвижно на хвостовой части инерционного тела 2, например, с помощью сварки.
Для обеспечения более широкой диаграммы чувствительности датчика рабочую пружину 3 целесообразно использовать конической формы с опорой витка малого диаметра на головку регулировочного винта 6. В этом случае пружину 3 можно расположить внутри инерционного тела 2. При этом масса пружины 3 будет существенно меньше массы инерционного тела 2, что положительно скажется на динамические характеристики чувствительного элемента датчика. Кроме того, такое расположение рабочей пружины 3 и регулировочного винта 6 позволит также уменьшить габариты датчика.
Датчик работает следующим образом.
При действии на датчик ускорения а возникает действующая на чувствительный элемент сила инерции Р=m·а, где m - масса инерционного тела. В случае превышения силой инерции начального значения восстанавливающей силы F, которую генерирует рабочая пружина 3, инерционное тело 2 перемещается и происходит контактирование подвижного электрического контакта 5 с неподвижным контактом 4. Замыкание электрического контакта будет свидетельствовать о достижении действующим на датчик ускорения порогового значения, определяемого отношением F/m.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ДАТЧИК | 2021 |
|
RU2760150C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2021 |
|
RU2768012C1 |
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2020 |
|
RU2754918C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2017 |
|
RU2669014C1 |
| ИНЕРЦИОННЫЙ КОНТАКТНЫЙ ДАТЧИК | 2024 |
|
RU2835162C1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2014 |
|
RU2580902C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2007 |
|
RU2362232C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2018 |
|
RU2693836C1 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2007 |
|
RU2362233C1 |
Изобретение относится к области приборостроения, а именно к инерционным датчикам порогового действия, и предназначено для контроля за достижением ускорениями, действующими на объект при столкновении с другими объектами, например, при транспортных авариях, пороговых уровней. Инерционный датчик содержит размещенное в корпусе с упором инерционное тело, поджатое к одной стороне упора и имеющее со стороны опорной поверхности хвостовую часть. Датчик имеет неподвижный контакт в виде кольца, размещенного на другой стороне упора и соединенного с одним токовыводом, и подвижный контакт, который закреплен на хвостовой части инерционного тела и соединен гибким токопроводом с другим токовыводом. Технический результат - повышение надежности замыкания электрических контактов датчика и отсутствие самопроизвольного срабатывания датчика при поломке рабочей пружины. 1 ил.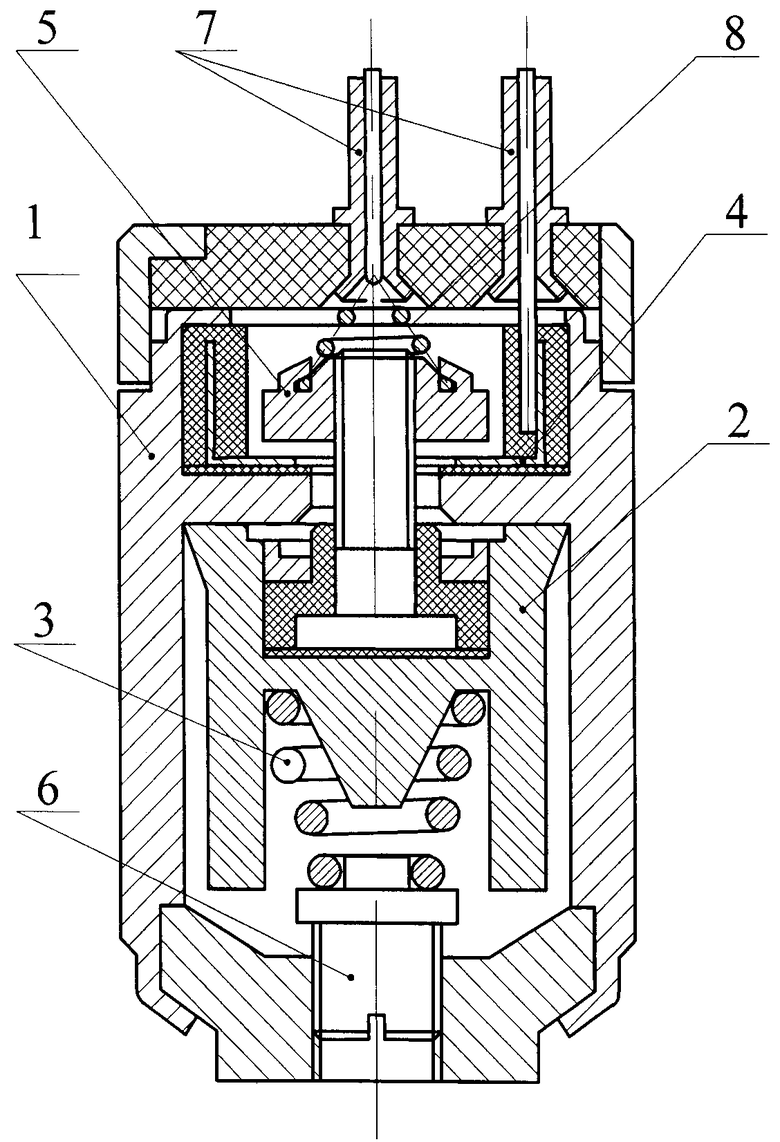
Инерционный датчик, содержащий размещенное в корпусе с упором инерционное тело, поджатое к одной стороне упора и снабженное со стороны опорной поверхности хвостовой частью, и контактную систему, включающую неподвижный контакт, размещенный на другой стороне упора, подвижный контакт и токовыводы, расположенные со стороны хвостовой части инерционного тела, отличающийся тем, что неподвижный контакт выполнен в виде кольца, соединенного с одним из токовыводов, а подвижный контакт закреплен на хвостовой части инерционного тела и соединен гибким токопроводом с другим токовыводом.
| Подкапывающая секция картофелеуборочного комбайна | 2023 |
|
RU2826306C1 |
| US 3889130 A, 10.06.1975 | |||
| US 4184057 A, 15.06.1977 | |||
| US 3453405 A, 01.07.1969 | |||
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| SU 922906 A1, 23.04.1982 | |||

