Изобретение относится к области приборостроения, а именно - к пороговым датчикам инерционного типа. Пороговые датчики инерционного типа устанавливаются, как правило, на движущихся объектах и используются для определения момента достижения ускорением, действующим на датчик, заданной величины.
Порог по ускорению срабатывания датчика обеспечивается путем поджатая упругим элементом инерционного тела к опорной поверхности с заданным усилием, отношение которого к массе инерционного тела и определяет величину порога. Движение инерционного тела начинается при достижении действующим ускорением заданной величины, определяемой порогом по ускорению срабатывания. Сигнал о достижении действующим ускорением заданной величины формируется, например, путем замыкания нормально разомкнутого электрического контакта датчика при перемещении его инерционного тела на величину межконтактного зазора.
Пороговые датчики инерционного типа можно использовать не только для определения момента достижения ускорением, действующим на датчик и, соответственно, на движущийся объект, заданной величины при его разгоне или торможении, но и для регистрации длительности процесса разгона или торможения движущегося объекта путем измерения длительности замыкания электрического контакта датчика соответствующим таймером. Определив длительность процесса разгона или торможения движущегося объекта и зная начальные параметры его движения, можно оценить протяженность участков разгона или торможения. Подобная информация может быть использована автоматическими системами управления движущимися объектами. Например, используя данный алгоритм измерений, можно оценить протяженность тормозного пути автомобиля.
При этом необходимо обеспечить, чтобы после срабатывания датчика и действии не него ускорения, величина которого превышает величину его порога по ускорению срабатывания, электрический контакт датчика оставался непрерывно замкнутым, так как размыкание электрического контакта датчика, даже в течение непродолжительного времени, приведет к тому, что отсчет времени таймером начнется вновь и информация о параметрах движения перемещающегося объекта будет искажена. Обеспечить непрерывное замыкание электрического контакта порогового датчика, установленного на движущийся объект, очень сложно, так как процессы разгона или торможения данного объекта могут сопровождаться интенсивными вибрационными нагрузками, действующими на датчик. Перемещения внутренних элементов датчика под действием вибрационных нагрузок могут приводить к тому, что будут происходить размыкания его электрического контакта.
Поэтому надежный алгоритм работы порогового датчика инерционного типа, в том числе и в качестве регистратора длительности процесса разгона или торможения движущегося объекта, обеспечивается в том случае, если после срабатывания датчика его электрический контакт остается непрерывно замкнутым в течении заданного времени (например, в течение нескольких секунд), которое отсчитывается специальным таймером.
Существуют различные конструкции пороговых датчиков инерционного типа, в которых инерционное тело поджато упругим элементом для обеспечения требуемой величины порога по ускорению срабатывания. При этом упругий элемент одновременно является подвижным электрическим контактом, что позволяет существенно упростить конструкцию датчика.
Инерционный датчик, в котором функцию инерционного тела выполняет шарик, а упругий элемент является также подвижным электрическим контактом, известен из описания к патенту США №5237135, опубл. 17.08.93 г. В данной конструкции шарик расположен в коническом углублении, выполненном в корпусе датчика, с возможностью перемещения как вдоль, так и под углом к оси датчика, а в качестве упругого элемента. закрепленного в корпусе, используются сформированные путем вырезов на пластине консольные балки (восемь штук), которые поджимают шарик к конической опоре и одновременно являются подвижными электрическими контактами. Основным недостатком аналога является то, что консольные балки, нагруженные на конце шариком, образуют динамическую систему, которая является колебательной. Так как любая механическая колебательная система характеризуется наличием частот, при которых возможно возникновение резонанса, то в условиях вибронагружений это может приводить как к потере устойчивости датчика и ложным срабатываниям, так и дребезгу упругих элементов и, соответственно, размыканию электрических контактов датчика после его срабатывания.
Известен пороговый датчик инерционного типа (патент РФ №2669014. МПК H01H 35/14, опубл. 05.10.2018), выбранный в качестве прототипа, содержащий размещенное в корпусе сферическое инерционное тело, установленное с возможностью перемещения вдоль и под углом к оси датчика. Инерционное тело поджато с помощью закрепленного в корпусе упругого элемента с отрицательной жесткостью на участке рабочего хода, выполненного в виде гибкого стержня. Упругий элемент является одновременно подвижным электрическим контактом. Центральной части гибкого стержня, взаимодействующей с инерционным телом, придана выпуклая в сторону неподвижного контакта форма, а концы стержня дополнительно оперты на внутренние поверхности корпуса датчика для образования симметричной, относительно оси датчика, формы изгиба стержня.
Выполнение упругого элемента в виде гибкого упругого стержня (см. Е.П. Попов. Теория и расчет гибких упругих стержней, М., Наука, 1986 г., стр. 105), благодаря формированию начального прогиба стержня при закреплении его концов и большому прогибу центральной части, обеспечивает силовую характеристику (зависимость обобщенной восстанавливающей силы от величины прогиба центральной части стержня), на которой есть участок, где происходит уменьшение силы, но при этом вектор обобщенной восстанавливающей силы не меняет свое направление. Указанный участок силовой характеристики и используется для обеспечения требуемого порога по ускорению срабатывания. Так как величина обобщенной восстанавливающей силы в зависимости от перемещения инерционного тела уменьшается, обобщенный коэффициент жесткости упругого элемента - гибкого стержня - на участке рабочего хода имеет отрицательное значение (см. патент РФ №2582324). Поэтому динамическая система датчика является неколебательной, благодаря чему достигается повышение точности срабатывания датчика при действии ускорений, а также повышение устойчивости датчика в условиях вибронагружений. Основным недостатком прототипа является то, что после срабатывания датчика и замыкания его электрического контакта возможны кратковременные размыкания контакта, так как вибрационные нагрузки, действуя на инерционное тело, вызовут его перемещения в сторону от электрического контакта, что приведет к уменьшению контактного давления между подвижным и неподвижным электрическими контактами вплоть до его полного исчезновения. В результате этого произойдет размыкание электрического контакта.
Решаемой проблемой является создание порогового датчика инерционного типа, у которого после срабатывания и замыкания его электрического контакта не происходит размыканий контакта при действии на датчик вибрационных ускорений, амплитуда которых может быть сопоставима с величиной порога по ускорению срабатывания датчика.
Достигаемым техническим результатом является повышение точности срабатывания датчика при действии вдоль его оси ускорения, величина которого превышает порог по ускорению срабатывания, повышение надежности замыкания его электрического контакта и отсутствие размыканий контакта в условиях действия на датчик-вибрационных нагрузок.
Для достижения технического результата в пороговом датчике инерционного типа, содержащем размещенные в корпусе инерционное тело, установленное с возможностью перемещения вдоль оси датчика, поджатое с помощью закрепленного в корпусе первого упругого элемента с отрицательной жесткостью на участке рабочего хода, выполненного в виде гибкого упругого стержня, центральной части которого, взаимодействующей с инерционным телом, придана выпуклая форма, а концы стержня дополнительно оперты на внутреннюю поверхность корпуса датчика, подвижный и неподвижный электрические контакты, новым является то, что в качестве подвижного электрического контакта используется дополнительно установленный в корпусе второй упругий элемент в виде гибкого упругого стержня, центральной части которого, взаимодействующей с инерционным телом, придана выпуклая форма с большим прогибом, при этом второй упругий элемент расположен осесимметрично первому упругому элементу таким образом, что вектора восстанавливающих сил первого и второго упругих элементов противоположно направлены.
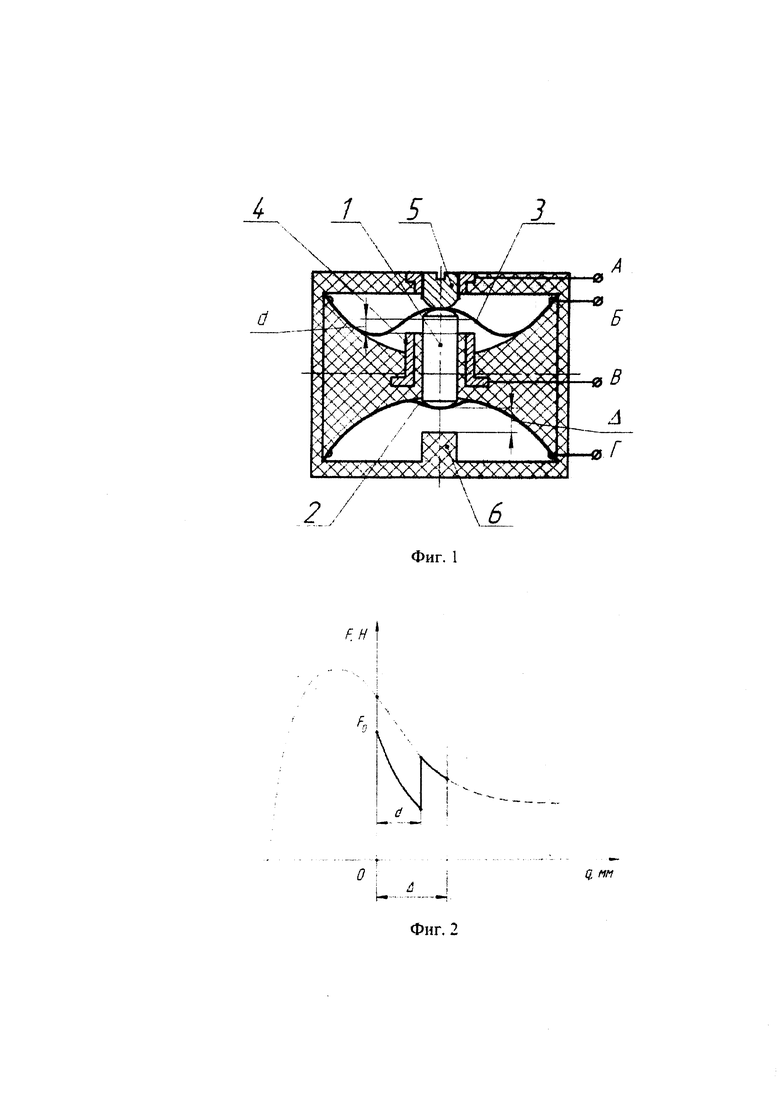
На фиг. 1 изображена конструкция порогового датчика инерционного типа; на фиг. 2 - качественный вид суммарной восстанавливающей силы упругих элементов 2 и 3 в зависимости от перемещения инерционного тела, при этом силовая характеристика упругого элемента 2 показана штриховой линией.
Пороговый датчик инерционного типа содержит инерционное тело 1, имеющее цилиндрическую форму со скругленными торцевыми поверхностями, которое установлено с возможностью перемещения вдоль оси датчика. Инерционное тело 1 поджато к опоре 5 закрепленным в корпусе 6 упругим элементом 2, выполненным в виде гибкого стержня, центральной части которого, взаимодействующей с инерционным телом 1, придана выпуклая форма, а концы стержня дополнительно оперты на одну из криволинейных внутренних поверхностей корпуса датчика, благодаря чему обеспечивается силовая характеристика упругого элемента с отрицательной жесткостью на участке рабочего хода Δ. В качестве подвижного электрического контакта используется, аналогичный упругому элементу 2, упругий элемент 3, центральной части которого, взаимодействующей с инерционным телом 1, придана выпуклая форма с большим прогибом, чем у упругого элемента 2. Упругий элемент 3 расположен оеесимметрично упругому элементу 2 таким образом, что вектора их восстанавливающих сил противоположно направлены. Неподвижный электрический контакт 4 размещен в зоне прогиба центральной части упругого элемента 3 на расстоянии d от него. Данное расстояние является величиной межконтактного зазора. Опора 5 установлена в корпусе 6 датчика с возможностью перемещения, например, по резьбе, для обеспечения предварительного смещения инерционного тела 1, расположенного между упругими элементами 2 и 3, для точной настройки порога по ускорению срабатывания. При этом опора 5, выполненная из металла, может использоваться в качестве контакта исходного состояния инерционного тела, так как в исходном положении инерционного тела 1 при его поджатии к опоре 5 упругим элементом 2 обеспечивается достаточная величина контактного давления между подвижным электрическим контактом - упругим элементом 3 - и опорой 5.
Для подключения датчика к регистрирующей аппаратуре используются токовыводы А, Б, В, и Г. В процессе эксплуатации датчика замкнутая цепь А-Б будет свидетельствовать о том, что инерционное тело 1 датчика до его применения находится в исходном состоянии, а при срабатывании датчика будет происходить замыкание цепи Б-В.
Для повышения надежности работы датчика можно соединить концы упругих элементов 2 и 3 с противоположной стороны от места присоединения к ним токовыводов, а инерционное тело 1 выполнить из электроизоляционного материала или из металла, но с электроизоляционным покрытием. В этом случае дополнительный контроль замкнутой цепи Б-Г будет свидетельствовать о том, что упругие элементы 2 и 3 не фрагментированы и находятся в работоспособном состоянии. Сигнал о срабатывании датчика будет регистрироваться по замыканию цепи В-Г. Данная схема подключения датчика к регистрирующей аппаратуре является предпочтительной, так как вследствие того, что вектора восстанавливающих сил упругих элементов 2 и 3 противоположно направлены, поломка упругого элемента 2 приведет к тому, что упругий элемент 3 вместе с инерционным телом переместится в сторону неподвижного электрического контакта 4 и начнет с ним контактировать, что приведет к замыканию электрической цепи Б-В и выдаче ложного сигнала о срабатывании датчика, что недопустимо. Поэтому, если сигнал о срабатывании датчика будет регистрироваться по замыканию цепи В-Г, то при поломке упругого элемента 2 протекания тока от то ковы вода Г до токовывода В, даже при контакте упругого элемента 3 с неподвижным электрическим контактом 4, не будет.
Инерционное тело датчика может изготавливаться из различных материалов: высокой плотности - сплавов типа ВНЖ и т.п., если необходимо обеспечить датчику низкие пороги по ускорению срабатывания, или малой плотности - полимеры, стекло и т.п., а также может выполняться пустотелым, если необходимо обеспечить высокие пороги по ускорению срабатывания. Инерционное тело, имеющее цилиндрическую форму со скругленными торцевыми поверхностями устанавливается в цилиндрическое отверстие в корпусе датчика с зазором, обеспечивающем ему перемещение только по оси датчика.
Для обеспечения устойчивых, симметричных относительно оси датчика, форм упругих элементов в виде гибких стержней при большом упругом прогибе их центральной части, концы стержней дополнительно оперты на поверхности, которые могут иметь различную форму - как плоскую, так и криволинейную. Они могут быть сформированы непосредственно на внутренних поверхностях корпуса датчика или быть выполнены в виде отдельных деталей, входящих в конструкцию датчика. Поэтому с целью упрощения конструкции датчика его корпус целесообразно выполнять методом прессования из электроизоляционного материала типа АГ-4В и т.п., при котором операция выполнения криволинейных внутренних поверхностей корпуса датчика является более простой и технологичной и, кроме того, позволяет одновременно закрепить необходимые детали в корпусе датчика при его изготовлении путем армирования.
Упругие элементы датчика в виде гибких упругих стержней изготавливаются из готового проката - ленты из коррозионностойкого, немагнитного, электропроводящего сплава, например, сплава 36НХТЮ. Геометрические параметры упругих элементов - толщина, длина, ширина - могут быть как одинаковыми, так и различными. При закреплении упругих элементов в корпусе датчика им придается форма, которая повторяет форму внутренних криволинейных поверхностей корпуса, а центральным участкам стержней, между которыми размещается инерционное тело, дополнительно придается выпуклая форма, необходимая для позиционирования инерционного тела и формирования упругих элементов, обладающих силовыми характеристиками с отрицательным обобщенным коэффициентом жесткости.
Силовая характеристика упругих элементов представляет собой зависимость силы F, генерируемой гибким стержнем, от перемещения ее центральной части. Благодаря применению в датчике двух упругих элементов 2 и 3, вектора восстанавливающих сил которых противоположно направлены, на инерционное тело 1 будет действовать суммарная восстанавливающая сила F(q), зависимость которой представлена на фиг. 2. В исходном положении инерционного тела на него действует сила F0, отношение которой к массе инерционного тела и определяет величину порога по ускорению срабатывания датчика. В начале движения на инерционное тело будет действовать суммарная восстанавливающая сила упругих элементов 2 и 3. После перемещения инерционного тела на величину межконтактного зазора d и до момента перемещения инерционного тела 1 на величину рабочего хода Δ на него будет действовать восстанавливающая сила только от упругого элемента 2, так как упругий элемент 3 - подвижный электрический контакт - после контакта с неподвижным электрическим контактом 4 теряет связь с инерционным телом, благодаря чему при действии на датчик вибрационных нагрузок микроперемещения инерционного тела 1 не будут оказывать влияния на упругий элемент 3. Поэтому величина рабочего хода Δ инерционного тела должна выбираться из условия Δ>d.
Неподвижный электрический контакт изготавливается из электропроводящего металла, его конструктивное исполнение может быть различным в зависимости от того, какой тип контакта с подвижным электрическим контактом - упругим элементом в виде гибкого стержня -необходимо реализовать.
Если неподвижный контакт выполнен в виде цилиндрической втулки, как показано на фиг. 1, то при его контакте с упругим элементом контактное давление будет сосредоточено в двух точках.
Можно выполнить неподвижный электрический контакт в виде двух криволинейных пластин, установленных заподлицо на внутренней криволинейной поверхности датчика, по которой перекатывается упругий элемент - подвижный электрический контакт. В этом случае при накате подвижным электрическим контактом на пластины произойдет их перемыкание и, соответственно, замыкание электрического контакта датчика. В данном варианте выполнения неподвижного контакта замыкание электрического контакта датчика в условиях действии вибрации будет более надежным, так как небольшие перемещения или перекатывания упругого элемента по контактным пластинам не приведут к уменьшению контактного давления и размыканию контакта.
Для подключения датчика к регистрирующей аппаратуре к его токовыводам А, Б, В, Г присоединяется провод, например, типа МСЭ (ТУ 16-505.083-78).
Датчик работает следующим образом. При действии вдоль оси датчика ускорения, величина которого превышает его порог по ускорению срабатывания, инерционное тело 1 перемещает центральную часть упругого элемента 2 на величину рабочего хода Δ до его соприкосновения с упором, выполненным на корпусе 6. При определенной величине перемещения инерционного тела 1 упругий элемент 3 - подвижный электрический контакт - контактирует с неподвижным электрическим контактом 4, вследствие чего происходит замыкание электрической цепи, а инерционное тело продолжает свое движение до соприкосновения с упором, выполненным на корпусе датчика. Момент замыкания электрического контакта свидетельствует о достижении ускорением заданной величины, соответствующей порогу по ускорению срабатывания датчика, а длительность замыкания электрического контакта датчика регистрируется специальным таймером. Полученная информация передается автоматической системе управления движущимся объектом.
Проведенные испытания макетных образцов инерционного порогового датчика, выполненного в соответствии с изобретением, подтвердили достижение заявляемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2017 |
|
RU2669014C1 |
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2014 |
|
RU2580902C1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2010 |
|
RU2451940C1 |
| ИНЕРЦИОННЫЙ ДАТЧИК | 2012 |
|
RU2522895C2 |
| ИНЕРЦИОННЫЙ КОНТАКТНЫЙ ДАТЧИК | 2024 |
|
RU2835162C1 |
| ИНЕРЦИОННЫЙ ДАТЧИК | 2021 |
|
RU2760150C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2020 |
|
RU2754918C1 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1998 |
|
RU2145747C1 |
| ВКЛЮЧАТЕЛЬ ИНЕРЦИОННЫЙ | 2013 |
|
RU2541510C1 |
Изобретение относится к области приборостроения, а именно к пороговым датчикам инерционного типа. Технический результат заключается в повышении точности срабатывания датчика при действии вдоль его оси ускорения, величина которого превышает порог по ускорению срабатывания, в повышении надежности замыкания его электрического контакта и отсутствии размыканий контакта в условиях действия на датчик вибрационных нагрузок. Пороговый датчик инерционного типа содержит размещенное в корпусе инерционное тело, установленное с возможностью перемещения вдоль оси датчика, поджатое с помощью первого упругого элемента с отрицательной жесткостью на участке рабочего хода, выполненного в виде гибкого упругого стержня, центральной части которого, взаимодействующей с инерционным телом, придана выпуклая форма, а концы стержня дополнительно оперты на внутреннюю поверхность корпуса датчика. Датчик содержит подвижный и неподвижный электрические контакты, в качестве подвижного электрического контакта используется второй упругий элемент в виде гибкого упругого стержня, центральной части которого, взаимодействующей с инерционным телом, придана выпуклая форма с большим прогибом. 2 ил.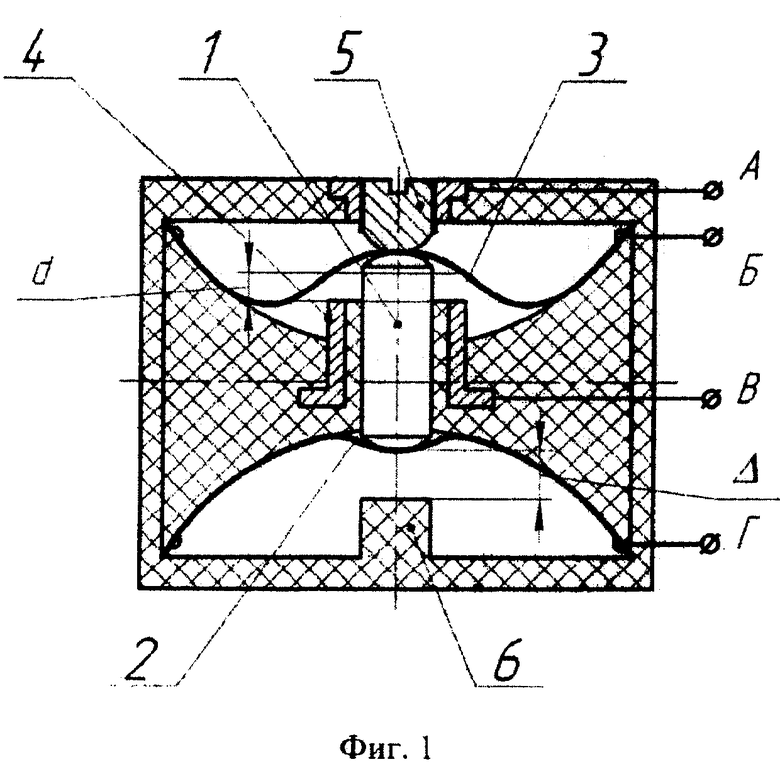
Пороговый датчик инерционного типа, содержащий размещенные в корпусе инерционное тело, установленное с возможностью перемещения вдоль оси датчика, поджатое с помощью закрепленного в корпусе первого упругого элемента с отрицательной жесткостью на участке рабочего хода, выполненного в виде гибкого упругого стержня, центральной части которого, взаимодействующей с инерционным телом, придана выпуклая форма, а концы стержня дополнительно оперты на внутреннюю поверхность корпуса датчика, подвижный и неподвижный электрические контакты, отличающийся тем, что в качестве подвижного электрического контакта используется дополнительно установленный в корпусе второй упругий элемент в виде гибкого упругого стержня, центральной части которого, взаимодействующей с инерционным телом, придана выпуклая форма с большим прогибом, при этом второй упругий элемент расположен осесимметрично первому упругому элементу таким образом, что векторы восстанавливающих сил первого и второго упругих элементов противоположно направлены.
| Способ обработки червячных колес | 1958 |
|
SU119064A1 |
| УПРУГИЙ ЭЛЕМЕНТ ЛИПАТОВА | 2015 |
|
RU2582324C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2017 |
|
RU2669014C1 |
| US 5237135 A1, 17.08.1993 | |||
| ИНЕРЦИОННЫЙ ДАТЧИК | 2012 |
|
RU2522895C2 |
| Датчик пороговых ускорений | 1990 |
|
SU1820335A1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2014 |
|
RU2580902C1 |
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| US 3453405 A1, 01.07.1969 | |||
| DE 3313033 C1, 02.08.1984 | |||
| DE 102006052312 A1, 08.05.2006. | |||

