Изобретение относится к области приборостроения, а именно к пороговым датчикам инерционного типа.
Пороговые датчики инерционного типа используются для определения момента достижения ускорением, действующим на датчик, заданной величины. Пороговые датчики инерционного типа устанавливаются, как правило, на движущихся объектах для контроля достижения ускорениями пороговых уровней, в том числе при столкновении с другими объектами, например, при транспортных авариях. В этом случае происходит резкое изменение скорости движущегося объекта, и на датчик действует импульс ударного ускорения.
Основными характеристиками пороговых датчиков инерционного типа являются: порог по ускорению срабатывания, величина рабочего хода и диаграмма чувствительности. Порог по ускорению срабатывания обеспечивается путем поджатия инерционного тела к опорной поверхности с заданным усилием, отношение которого к массе инерционного тела и определяет величину порога. Движение инерционного тела начинается при достижении действующего ускорения заданной величины, определяемой порогом по ускорению срабатывания.
Сигнал о достижении заданного порога по ускорению срабатывания формируется, например, путем замыкания нормально разомкнутого электрического контакта при перемещении инерционного тела.
К основным характеристикам пороговых датчиков инерционного типа относится диаграмма чувствительности, показывающая, при каком значении ускорения начинается перемещение инерционного тела (или происходит замыкание электрического контакта) в зависимости от угла между осью датчика и вектором ускорения. Исходя из условия минимизации количества датчиков, устанавливаемых на движущийся объект, целесообразно, чтобы датчик мог срабатывать при действии ускорений, вектор которых может быть направлен как вдоль, так и под углами к оси датчика.
Одним из путей решения данной технической задачи является использование в датчике механизма с инерционным телом, имеющим сферическую форму, который расположен в углублении конической формы, выполненном, например, в корпусе датчика. В этом случае датчик имеет диаграмму чувствительности в виде конуса. Угол конуса диаграммы чувствительности зависит от угла конического углубления, в котором размещается сферическое инерционное тело.
Порог по ускорению срабатывания можно обеспечить разными способами. Инерционное тело может быть поджато к опорной поверхности (имеющей форму конуса) с помощью магнита. При этом в качестве подвижного электрического контакта может быть использован как сам шарик, что потребует присоединения к нему токовывода, так и отдельная деталь, которую перемещает шарик до контакта с неподвижным электрическим контактом.
Известна конструкция датчика (см. патент ФРГ DE 3313033, МПК H01H 35/14, опубл. 02.08.1984 г.), в которой шарик поджат к конической опорной поверхности магнитом, а при перемещении в конце рабочего хода шарик взаимодействует с деталью, которая является подвижным электрическим контактом. Шарик перемещает подвижный электрический контакт до соприкосновения с неподвижным электрическим контактом, благодаря чему происходит замыкание электрической цепи.
В том случае, когда для удержания инерционного тела используется магнит, величина силы поджатия уменьшается в зависимости от перемещения инерционного тела, поэтому обобщенный коэффициент жесткости упругого элемента получается отрицательным. Так как коэффициент жесткости упругого элемента отрицательный, датчик представляет собой неколебательную динамическую систему, у которой в условиях вибронагружений не происходит возникновения резонанса, и, соответственно, не происходит колебаний чувствительного элемента приводящих к замыканию контакта, то есть к ложному срабатыванию датчика. Тем не менее, недостатком подобных конструкций является влияние процесса замыкания электрического контакта на точность порога по ускорению срабатывания датчика. Вследствие того, что подвижный электрический контакт должен обладать собственной устойчивостью к ускорениям, инерционному телу необходимо преодолеть определенное усилие для обеспечения замыкания электрического контакта. При этом усилие начального поджатия инерционного тела, обеспечиваемое магнитом, и усилие, которое необходимо преодолеть инерционному телу для замыкания электрического контакта, обеспечиваются разными деталями датчика, что усложняет процесс настройки порога по ускорению срабатывания. Для исключения влияния процесса замыкания электрического контакта на точность порога по ускорению срабатывания целесообразно, чтобы шарик являлся подвижным электрическим контактом, или функции подвижного электрического контакта и упругого элемента были совмещены в одной детали.
Так, например, известен инерционный датчик (см. патент США №3453405, МПК H01H 35/02, опубл. 01.07.69 г.), содержащий корпус, инерционное тело сферической формы, установленное с возможностью перемещения вдоль и под углом к оси датчика и поджатое с помощью упругого элемента к конической опоре в корпусе. Под действием ускорения, величина которого превышает порог по ускорению срабатывания, а вектор может быть направлен как вдоль, так и под углом к оси датчика, инерционное тело перемещается и замыкает электрический контакт. Основным недостатком аналога является ненадежное замыкание электрического контакта при работе датчика вследствие того, что токоподвод к подвижному электрическому контакту - инерционному телу (шарику) - осуществляется через упругий элемент - пружину, которая поджимает инерционное тело для обеспечения требуемого порога по ускорению срабатывания. В этом случае для надежного замыкания электрического контакта необходимо обеспечить дополнительную гальваническую связь в местах контактирования пружины с токовыводом и инерционным телом, что может существенно усложнить процесс изготовления и сборки датчика.
Инерционный датчик, в котором инерционное тело - шарик - выполняет функцию только инерционного тела, а подвижный электрический контакт является отдельной деталью, одновременно выполняющей роль упругого элемента, известен из описания к патенту США №5237135, МПК H01H 35/14, опубл. 17.08.93 г., который выбран в качестве прототипа. В данной конструкции шарик расположен в коническом углублении, выполненном в корпусе датчика, с возможностью перемещения как вдоль, так и под углом к оси датчика, а в качестве упругого элемента, закрепленного в корпусе, используются сформированные путем вырезов на пластине консольные балки (8 штук), которые поджимают шарик к конической опоре и одновременно являются подвижными электрическими контактами. К главным недостаткам прототипа можно отнести то, что консольные балки, нагруженные на конце шариком, образуют динамическую систему, которая является колебательной. Во-первых, реакция колебательной системы на ударные импульсы произвольной формы может отличаться в зависимости от темпа нарастания ускорения. И, во-вторых, так как любая механическая колебательная система характеризуется наличием частот, при которых возможно возникновение резонанса, то в условиях вибронагружений возникновение резонанса может приводить к дребезгу упругих элементов и, соответственно, потере устойчивости датчика и ложным срабатываниям (Ю.И. Иориш, Виброметрия, ГНТИ, Москва, 1963 г., стр. 463).
Кроме того, диаграмма чувствительности датчика-прототипа неравномерная (особенно при действии ускорений в направлении, перпендикулярном оси датчика), так как в зависимости от направления вектора ускорения задействуются одна или две консольные балки.
Решаемой задачей является создание порогового датчика инерционного типа, надежно срабатывающего при ускорениях, действующих вдоль и под углом к оси датчика, при условии превышения порога по ускорению срабатывания датчика в соответствии с диаграммой чувствительности, в том числе при действии ударных импульсов произвольной формы.
Достигаемым техническим результатом является повышение точности срабатывания датчика при действии ускорений, в том числе ударных импульсов произвольной формы, повышении устойчивости в условиях вибронагружений и расширении функциональных возможностей.
Для достижения технического результата в пороговом датчике инерционного типа, содержащем размещенные в корпусе сферическое инерционное тело, установленное с возможностью перемещения вдоль и под углом к оси датчика, поджатое с помощью закрепленного в корпусе упругого элемента, являющегося подвижным контактом, и неподвижный контакт, новым является то, что упругий элемент выполнен в виде гибкого упругого стержня с отрицательной жесткостью на участке рабочего хода, при этом центральная часть стержня имеет большой упругий прогиб, а концы дополнительно оперты для образования симметричной формы изгиба относительно оси датчика.
Выполнение упругого элемента в виде гибкого упругого стержня (см. Е.И. Попов, Теория и расчет гибких упругих стержней, М.: Наука, 1986 г., стр. 105), благодаря формированию начального прогиба стержня при закреплении его концов и большому прогибу центральной части, обеспечивает силовую характеристику (зависимость обобщенной восстанавливающей силы от величины прогиба центральной части стержня), на которой есть участок, где происходит уменьшение силы, но при этом вектор обобщенной восстанавливающей силы не меняет свое направление. Указанный участок силовой характеристики и используется для обеспечения требуемого порога по ускорению срабатывания. Для этого перед настройкой требуемого порога по ускорению срабатывания осуществляется предварительное перемещение центральной части гибкого стержня вместе с установленным в коническом углублении инерционным телом (шариком) на расчетную величину для того, чтобы в начале движения шарика величина восстанавливающей силы была больше, чем в конце рабочего хода (в момент замыкания электрического контакта). После этого производится точная настройка порога по ускорению срабатывания датчика с использованием центробежной установки.
Так как величина обобщенной восстанавливающей силы в зависимости от перемещения инерционного тела уменьшается, обобщенный коэффициент жесткости упругого элемента - гибкого стержня - на участке рабочего хода имеет отрицательное значение. Поэтому динамическая система датчика является неколебательной, благодаря чему достигается повышение точности срабатывания датчика при действии ускорений, в том числе ударных импульсов произвольной формы, а также повышение устойчивости датчика в условиях вибронагружений.
Для обеспечения устойчивой, симметричной относительно оси датчика, формы гибкого стержня при большом упругом прогибе его центральной части, концы стержня дополнительно оперты на поверхности, которые могут иметь различную форму - как плоскую, так и криволинейную. Они могут быть сформированы непосредственно на внутренней поверхности корпуса датчика или быть выполнены на отдельных деталях, входящих в конструкцию датчика.
Центральная часто гибкого стержня, обращенная к неподвижному электрическому контакту, при перемещении на величину рабочего хода контактирует с неподвижным электрическим контактом. Благодаря выпуклой форме центральной части гибкого стержня (подвижного электрического контакта) обеспечивается необходимая величина контактного давления, достаточная для надежного замыкания электрической цепи. Опорная поверхность, к которой поджимается шарик, имеет коническую форму. В зависимости от угла конуса можно формировать различные виды диаграмм чувствительности, тем самым расширяя функциональные возможности датчика.
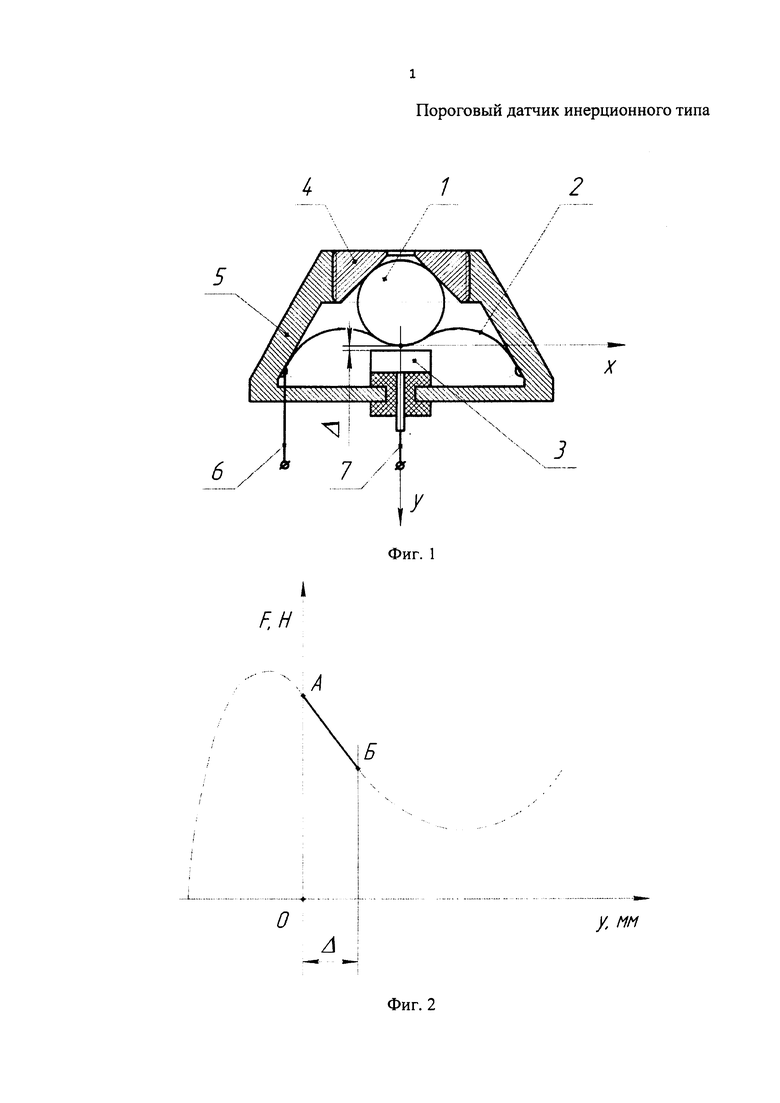
На фиг. 1 изображена конструкция порогового датчика инерционного типа; на фиг. 2 - вид силовой характеристики упругого элемента.
Пороговый датчик инерционного типа содержит сферическое инерционное тело - шарик 1, установленное с возможностью перемещения вдоль и под углом к оси датчика. Шарик 1 поджат к опоре 4 закрепленным в корпусе 5 упругим элементом - гибким стержнем 2, являющимся одновременно подвижным электрическим контактом. Упругий элемент 2 выполнен в виде гибкого стержня с отрицательной жесткостью на участке рабочего хода Δ. Неподвижный электрический контакт 3 размещен в зоне прогиба центральной части на расстоянии Δ от упругого элемента 2. Данное расстояние и является величиной межконтактного зазора. Опора 4 установлена в корпусе 5 датчика с возможностью перемещения, например, по резьбе, для обеспечения предварительного смещения центральной части гибкого стержня и для точной настройки порога по ускорению срабатывания. Для подключения датчика к регистрирующей аппаратуре используются токовыводы 6 и 7 от упругого элемента 2 и неподвижного электрического контакта 3 соответственно.
В качестве инерционного тела целесообразно использовать стандартный шарик необходимого диаметра, изготовленный из коррозионно-стойкого немагнитного сплава. При необходимости шарик может быть изготовлен из материалов, имеющих малую плотность - полимеры, стекло и т.п., а также может выполняться пустотелым.
Упругий элемент изготавливается из коррозионно-стойкого немагнитного электропроводящего сплава, например, сплава 36НХТЮ. Вогнутый участок в центре упругого элемента служит для позиционирования инерционного тела (шарика) и, кроме того, делает центральную часть гибкого стержня более жесткой, благодаря чему она перемещается по заданному закону. Неподвижный электрический контакт изготавливается из электропроводящего металла. В качестве токовыводов используется провод, например, типа МСЭ (ТУ 16-505.083-78).
Силовая характеристика упругого элемента 2 представляет собой зависимость силы F, генерируемой гибким стержнем, от перемещения Y ее центральной части. Как показано на фиг. 2, силовая характеристика имеет участок А-Б, на котором происходит уменьшение величины восстанавливающей силы F. То есть в начале движения шарика величина восстанавливающей силы F (точка А на силовой характеристике) больше, чем в конце рабочего хода - в момент замыкания электрического контакта (точка Б на силовой характеристике). Величина рабочего хода Δ, как правило, выбирается минимально возможной, но с учетом обеспечения отсутствия электрического пробоя между контактами.
Датчик работает следующим образом. Под действием ускорения, величина которого превышает порог по ускорению срабатывания, а вектор может быть направлен относительно оси датчика под разными углами, шарик 1 перемещает центральную часть упругого элемента 2 до соприкосновения с неподвижным электрическим контактом 3. При этом происходит замыкание электрической цепи. Момент замыкания электрического контакта, который регистрируется аппаратурой, свидетельствует о достижении ускорением заданной величины, соответствующей порогу по ускорению срабатывания датчика.
Проведенные испытания макетных образцов инерционного порогового датчика, выполненного в соответствии с изобретением, подтвердили достижение заявляемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2021 |
|
RU2768012C1 |
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2014 |
|
RU2580902C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2020 |
|
RU2754918C1 |
| ИНЕРЦИОННЫЙ КОНТАКТНЫЙ ДАТЧИК | 2024 |
|
RU2835162C1 |
| ИНЕРЦИОННЫЙ ДАТЧИК | 2012 |
|
RU2522895C2 |
| ИНЕРЦИОННЫЙ ДАТЧИК | 2021 |
|
RU2760150C1 |
| ВКЛЮЧАТЕЛЬ ИНЕРЦИОННЫЙ | 2013 |
|
RU2541510C1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2010 |
|
RU2451940C1 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1998 |
|
RU2145747C1 |
Изобретение относится к области приборостроения, а именно к пороговым датчикам инерционного типа, и предназначено для контроля за достижением ускорений движущихся объектов пороговых уровней, в том числе при столкновении с другими объектами, например, при транспортных авариях. Пороговый датчик инерционного типа содержит инерционное тело сферической формы, установленное с возможностью перемещения вдоль и под углом к оси датчика. Тело сферической формы поджато закрепленным в корпусе упругим элементом, выполненным в виде гибкого упругого стержня с отрицательной жесткостью на участке рабочего хода. Центральная часть гибкого стержня имеет большой упругий прогиб, а концы дополнительно оперты для образования симметричной формы изгиба стержня относительно оси датчика. Гибкий упругий стержень одновременно является подвижным электрическим контактом, взаимодействующим в конце рабочего хода с неподвижным электрическим контактом. Техническим результатом является повышение точности срабатывания датчика при действии ускорений, в том числе ударных импульсов произвольной формы, повышение устойчивости в условиях вибронагружений и расширение функциональных возможностей. 2 ил.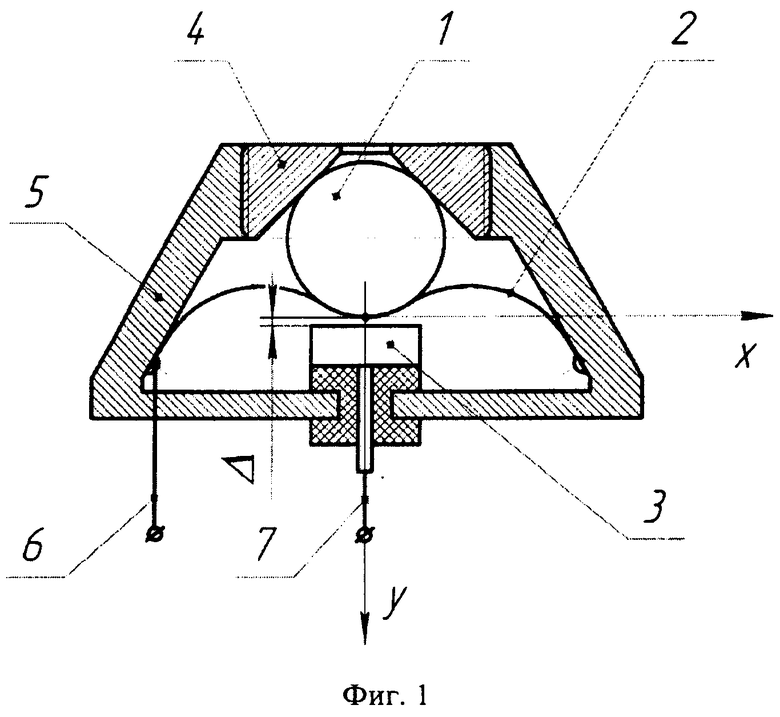
Пороговый датчик инерционного типа, содержащий размещенные в корпусе сферическое инерционное тело, установленное с возможностью перемещения вдоль и под углом к оси датчика, поджатое с помощью закрепленного в корпусе упругого элемента, являющегося подвижным контактом, и неподвижный контакт, отличающийся тем, что упругий элемент выполнен в виде гибкого упругого стержня с отрицательной жесткостью на участке рабочего хода, при этом центральной части стержня, взаимодействующей с инерционным телом, придана выпуклая в сторону неподвижного контакта форма, а концы стержня дополнительно оперты на внутренние поверхности корпуса датчика для образования симметричной формы изгиба стержня относительно оси датчика.
| US 5237135 A, 17.08.1993 | |||
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1998 |
|
RU2145747C1 |
| Датчик пороговых ускорений | 1990 |
|
SU1820335A1 |
| DE 3313033 C1, 02.08.1984 | |||
| US 3453405 A, 01.07.1969. | |||

