Изобретение относится к области приборостроения, а именно к инерционным датчикам порогового действия, и предназначено для контроля за достижением ускорения, действующим на объект при столкновении с другим объектом иди для контроля достижения требуемых ускорений (инерционных сил), действующих на движущийся объект.
Известны инерционные датчики порогового действия (см. патент США №4789762, МПК: Н01Н 35/14, опубл. 1988 г., авторское свидетельство №922906, МПК H01H 35/14,опубл. в БИ №15 в 1982 г.), у которых чувствительный элемент представляет собой инерционное тело, установленное на винтовой пружине в корпусе датчика. При этом на инерционном теле датчика размещается подвижный электрический контакт, а на корпусе датчика - неподвижный электрический контакт. Винтовая пружина является упругим элементом, обеспечивающим начальное усилие поджатая инерционного тела к корпусу датчика. Величина отношения начального усилия поджатия к массе инерционного тела определяет величину порога по ускорению срабатывания датчика.
При действии на датчик ускорения возникает сила инерции, которая стремится переместить инерционное тело в том случае, когда ее величина превышает начальное усилие поджатия пружины. При перемещении инерционного тела на величину межконтактного зазора происходит замыкание электрического контакта. Замыкание электрического контакта используется в качестве сигнала о достижении ускорением порогового значения.
Недостатком аналога (патент США №4789762) является ненадежная гальваническая связь между токовыводом и подвижным электрическим контактом вследствие того, что токопровод к подвижному электрическому контакту, являющемуся одновременно инерционным телом, осуществляется через корпус и (или) винтовую пружину. Кроме того, в связи с тем, что корпус датчика является токопроводом, то при необходимости электрической изоляции корпуса датчика от места его установки изоляционный материал будет искажать входной сигнал (импульс ударного ускорения), передаваемый чувствительному элементу датчика.
Недостатки известных аналогов заключаются в следующем. Размещение токовыводов на противоположных горцах корпуса датчика приводит к тому, что при установке датчика необходимо предусматривать в поверхности, на которую он устанавливается, места для размещения токовыводов, что усложняет как крепление датчика, размещение электрических проводов, идущих от датчика. Наличие неподвижного электрического контакта в зоне размещения опорной поверхности рабочей пружины усложняет или делает невозможным установку регулировочного устройства, изменяющего степень сжатия пружины и позволяющего более точно настраивать датчик на необходимый порог по ускорению срабатывания.
Известен инерционный датчик (патент RU №2522895 приоритет от 04.10.2012 «Инерционный датчик» авторов Липатов О.Ф., Ковалдов А.П., Пунин В.Н, Лобачев MB. Котик А.В., МПК Н01Н 35/14, опубл. 20.07.2014). Датчик состоит из корпуса, инерционного тела, поджатого рабочей пружиной к упору в корпусе. Пружина опирается на регулировочный винт. На противоположной стороне упора расположен неподвижный электрический контакт в виде кольца, который электрически изолирован от корпуса датчика Неподвижный электрический контакт соединен с одним из двух токовыводов, расположенных со стороны одной торцевой поверхности корпуса датчика. Подвижный электрический контакт закреплен на хвостовой части инерционного тела. Подвижный контакт связан с другим токовыводом гибким токопроводом в виде конической винтовой пружины. Электрические контакты могут иметь разнообразную форму поперечного сечения, но их форма и диаметры должны быть подобраны таким образом, чтобы при любом перемещения инерционного тела, включая поворот относительно оси датчика, происходило их контактирование, то есть замыкание электрического контакта. Для точной регулировки межконтактного зазора подвижный контакт имеет с хвостовой частью инерционного тела резьбовое соединение. После выставления необходимого межконтактного зазора контакт закрепляется неподвижно на хвостовой части инерционного тела, например, с помощью сварки Данный инерционный датчик выбран в качестве наиболее близкого аналога.
Недостатками известного инерционного датчика являются: конструкция датчика для одноразового применения, при поломке или дефекте рабочей пружины корпус нельзя восстановить; за счет того, что рабочую пружину можно регулировать только в узком диапазоне настроек, датчик не предназначен для широкого диапазона нагрузок; для срабатывания датчика необходим надежный непосредственный гальванический контакт подвижного и неподвижного электрических контактов (для этого необходимо использовать специальные покрытия).
Технической проблемой, на решение которой направлено заявляемое изобретение, является создание инерционного датчика предназначено для контроля, за достижением ускорения, действующим на объект при столкновении с другим объектом или для контроля достижения требуемых ускорений (инерционных сил), действующих на движущийся объект.
Технические результаты, на достижение которых направлено заявляемое изобретение, заключаются в расширении функциональных возможностей и повышении надежности.
Данные технические результаты достигаются тем, что в инерционном датчике, содержащем корпус, в котором расположено с упором инерционное тело, поджатое к одной стороне упора, и чувствительный элемент, и блок регистрации момента достижения порогового значения, расположенный на другой стороне упора и соединенный с токовыводами, новым является то, что инерционное тело выполнено в виде штока, а чувствительный элемент - в виде дросселя, который закреплен и подключен к блоку регистрации момента достижения порогового значения, упругий элемент выполнен в виде пакета пружин или винтовой пружины, при этом немагнитный зазор дросселя расположен через зазор от свободного конца штока, а блок регистрации момента достижения порогового значения выполнен в виде электронной схемы.
Расширение функциональных возможностей достигается за счет увеличения диапазона ускорений (инерционных сил) при которых может применяться инерционный датчик это достигается путем схемы сборки пружин в пакеты, можно, не увеличивая номенклатуры пружин, менять характеристику срабатывания инерционного датчика. В предлагаемой конструкции датчика могут применяться как тарельчатые, так и винтовые пружины.
Повышение надежности срабатывания инерционного датчика достигается за счет введения в состав электронной части датчика (выполнение блока регистрации момента достижения порогового значения в виде электронной схемы), который осуществляет контроль за перемещением штока под воздействием инерционных сил неконтактным способом, при этом исключается необходимость применения хорошего гальванического контакта, как реализовано в наиболее близком аналоге.
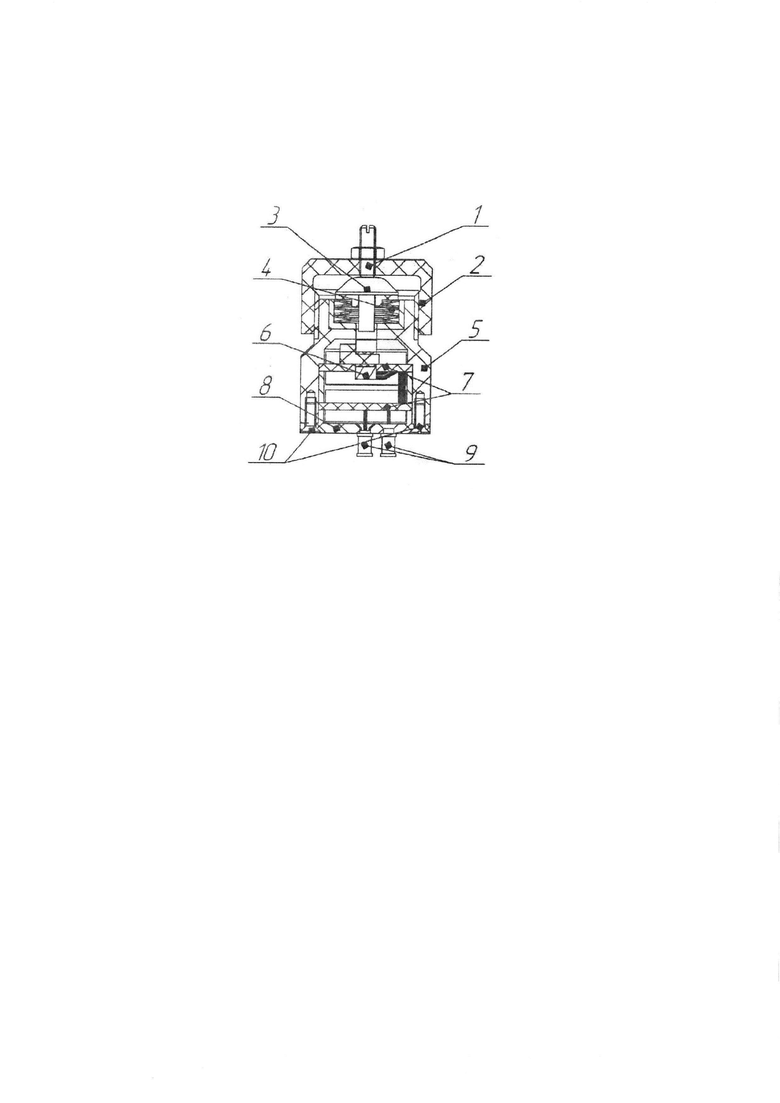
На фигуре представлен вариант реализации инерционного датчика.
Инерционный датчика содержит регулировочный винт 1 и корпус 2.
В корпусе 2 расположен с упором шток 3 (с помощью регулировочного винта 1). Шток 3 поджат к одной стороне упора посредством комплекта пружин 4. Шток 3 выполнен металлическим и установлен с возможностью осевого перемещения. Комплект пружин 4 расположен в соответствующем пазу корпуса 2. Блок 6 регистрации срабатывания датчика (момента достижения порогового значения) расположена на другой стороне упора и соединен с токовыводами 7. Токовыводы 7 закреплены в крышке корпуса 2.
Дроссель 5 соединен с блоком 6 регистрации при этом чувствительная часть дросселя (немагнитный зазор) расположен через зазор от свободного конца штока 3.
Блок 6 регистрации момента достижения порогового значения выполнен в виде электронной схемы. Электронная схема выполнена в виде комплекта печатных плат и предназначена для обработки сигнала с дросселя 5. Дроссель 5 включат немагнитный зазор.
Токовыводы 7 предназначены для подачи напряжения питания и для снятия характеристик срабатывания инерционного датчика.
Инерционный датчик работает следующим образом.
Инерционный датчик является электронно-механическим преобразователем. Принцип работы основан на изменении магнитных свойств сердечника дросселя 5 при помещении металла в его немагнитный зазор.
Предварительно через токовыводы 7 подается напряжение питания на блок 6 регистрации момента достижения порогового значения. При действии на инерционный датчик ускорения возникает действующая на чувствительный элемент механической части датчика на шток 3 (сила инерции). В случае превышения силой инерции начального значения восстанавливающей силы, которую генерирует комплект пружин 4, инерционное тело (шток 3) перемещается и происходит перекрытие немагнитного зазора дросселя 5. Перекрытие штоком 3 немагнитного зазора будет свидетельствовать о достижении действующим на датчик ускорения порогового значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ДАТЧИК | 2012 |
|
RU2522895C2 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2014 |
|
RU2580902C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2017 |
|
RU2669014C1 |
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2020 |
|
RU2754918C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2021 |
|
RU2768012C1 |
| ДАТЧИК УСКОРЕНИЯ | 1999 |
|
RU2192645C2 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2022 |
|
RU2784377C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2024 |
|
RU2824656C1 |
| Гидравлический замыкающий датчик | 2021 |
|
RU2777503C1 |
Изобретение относится к области приборостроения, а именно к инерционным датчикам порогового действия, и предназначено для контроля за достижением ускорения, действующего на объект при столкновении с другим объектом или для контроля достижения требуемых ускорений (инерционных сил), действующих на движущийся объект. Технические результаты, на достижение которых направлено заявляемое изобретение, заключаются в расширении функциональных возможностей за счет обеспечения возможности изменения пакета пружин или винтовой пружины и повышении надежности. Инерционный датчик состоит из корпуса, в котором находится комплект пружин или винтовая пружина, штока, являющегося инерционным телом, поджатого регулировочным винтом, дросселя, являющимся чувствительным элементом электронной части схемы датчика, комплекта печатных плат электронной части схемы датчика, нижней крышки, группы контактов, через которые подается питание и снимаются характеристики срабатывания переключателя. 1 ил.
Инерционный датчик, содержащий корпус, в котором расположено с упором инерционное тело, поджатое к одной стороне упора упругим элементом, и чувствительный элемент, и блок регистрации момента достижения порогового значения, расположенный на другой стороне упора и соединенный с токовыводами, отличающийся тем, что инерционное тело выполнено в виде штока, а чувствительный элемент - в виде дросселя, который закреплен и подключен к блоку регистрации момента достижения порогового значения, упругий элемент выполнен в виде пакета пружин или винтовой пружины, при этом немагнитный зазор дросселя расположен через зазор от свободного конца штока, а блок регистрации момента достижения порогового значения выполнен в виде электронной схемы.
| ИНЕРЦИОННЫЙ ДАТЧИК | 2012 |
|
RU2522895C2 |
| SU 922906 A1, 23.04.1982 | |||
| ВКЛЮЧАТЕЛЬ ИНЕРЦИОННЫЙ | 2013 |
|
RU2541510C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2001 |
|
RU2221302C2 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1998 |
|
RU2145747C1 |
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| US 4789762 A1, 06.12.1988 | |||
| DE 4035257 C2, 14.10.1993 | |||
| DE 4115329 C2, 24.02.1994 | |||
| СПОСОБ ИЗМЕРЕНИЯ ТЕПЛОВОГО СОПРОТИВЛЕНИЯ ДВУХПОЛЮСНИКОВ С ИЗВЕСТНЫМ ТЕМПЕРАТУРНЫМ КОЭФФИЦИЕНТОМ СОПРОТИВЛЕНИЯ | 2000 |
|
RU2167429C1 |
| US 5192839 А1, 09.03.1993 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 5237135A1, | |||

