Область техники.
Изобретение относится к области авиационной техники, в частности к аппаратуре для проведения летных испытаний (ЛИ) летательных аппаратов и их бортового оборудования (БО), и предназначается для исследования характеристик бортовых радиолокационных станций (БРЛС).
Уровень техники.
Известен способ экспериментального определения точностных характеристик высокоточных систем сопровождения авиационных и космических объектов и устройство для его осуществления, см. патент на изобретение РФ № 2093853, G01S 7/40, 1997.10.20, с помощью которого определяются составляющие вектора дальности, углов азимута и места, векторов скоростей и ускорения. Устройство содержит гироинерциальные системы, вычислительные машины, сумматоры, датчики угловых скоростей, каналы связи, при применении которых они позволяют автоматически в реальном масштабе времени получать указанные характеристики. В устройство, содержащее исследуемую систему сопровождения, размещенную на ЛА, введено прицельное устройство, гироинерциальная система также размещена на наблюдаемом объекте, система единого времени установлена на земле; блок определения точностных характеристик, размещенный на земле, содержит бортовые и наземные каналы связи. При выполнении эксперимента по определению точностных характеристик в качестве средств измерений для определения эталонных значений векторов относительных скоростей и ускорений используются гироинерциальные системы, устанавливаемые на измерительную платформу и на наблюдаемый авиационный или космический объект, который, однако, не позволяет с высокой точностью определить их угловые скорости и ускорения, а главное, координаты, необходимые при испытании БРЛС.
Известен распределенный информационно-управляющий комплекс группы многофункциональных летательных аппаратов, см. патент на изобретение РФ № 2232102, 7 В64С 13/00, 10.07.2004, в состав которого входят объединенные посредством каналов межбортового информационного обмена в единую информационную сеть информационно-управляющие комплексы многофункциональных летательных аппаратов (МЛА), каждый из которых содержит радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов естественных и искусственных полей, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, блок определения взаимных координат, блок связи и вычислительную систему. Последняя в комплексе каждого МЛА группы решает задачи ввода и вывода информации и управления информационным обменом, расчета основных информационных параметров состояния и движения МЛА, комплексной обработки информации (КОИ), а также дополнительно задачи хранения и обновления знаний об окружающем пространстве (геофизических полях, ориентирах и т.п.) и взаимодействующих с группой объектов. В состав вычислительной системы входят вычислительно-логические блоки формирования параметров состояния МЛА (координат, скорости, угловой ориентации относительно инерциального пространства, расчета параметров взаимного движения МЛА группы). Вся информация о состоянии группы передается посредством каналов межбортового информационного обмена на все МЛА группы, что обеспечивает информационное единство комплекса группы МЛА.
Однако точность данного комплекса недостаточна для проведения летных испытаний по определению характеристик БРЛС.
Известен способ групповой навигации движущихся объектов, см. патент на изобретение РФ № 2130622, G01S 5/12, 1999.05.20., который может использоваться в дифференциальных подсистемах спутниковых радионавигационных систем. Местоопределение достигается за счет введения двух вспомогательных объектов навигации в способе групповой навигации движущихся объектов и учете при вычислении координат основного объекта навигации, наряду с корректирующей информацией от контрольно-корректирующей станции дополнительной корректирующей информации от вспомогательных объектов навигации. В данном способе групповой навигации движущихся объектов учитываются зависимости изменения точности радионавигационного поля от взаимного расположения контрольно-корректирующей станции и основного объекта навигации. Поле погрешностей дифференциальной подсистемы аппроксимируется с учетом навигационной информации, получаемой от пространственно разнесенных контрольно-корректирующей станции и двух вспомогательных объектов навигации.
Однако данный способ не позволяет проводить летные испытания по определению характеристик БРЛС вследствие пропадания сигналов спутниковых радионавигационных систем при эволюциях измерительного (основного) и наблюдаемого ЛА.
Известна информационная система межсамолетной навигации, взятая за прототип, патент РФ на изобретение № 2222781, G01C 21/00, 2004.01.27, содержащая вычислитель, установленный на каждом борту, входами связанный с соответствующей инерциальной навигационной системой (ИНС) и приемником спутниковой навигационной системы (СНС), при этом выход первого вычислителя подключен к формирователю сигналов межсамолетной навигации (МСН), другой вход которого связан по линии передачи данных с вычислителем, установленным на другом борту соответственно, последовательно соединены первый сумматор, связанный с радиолокационной станцией (РЛС-МСН), блок оценки погрешности сигналов от РЛС-МСН, второй сумматор, связанный также с РЛС-МСН, сглаживающий фильтр и второй формирователь сигналов МСН, при этом второй вход первого сумматора подключен к выходу вычислителя эталонных значений сигналов, соответствующих курсовому углу и дальности, входами подключенному параллельно первому формирователю сигналов МСН, а выходы обоих формирователей сигналов МСН подключены к переключателю, управляющий вход которого связан с датчиком отказа СНС, а выход подключен к выходу информационной системы.
Однако точность выполнения режимов калибровки параметров РЛС - определение ее характеристик - недостаточна для проведения летных испытаний с помощью данной системы МСН. В данной системе РЛС-МСН выполняет роль датчика - измерителя координат ЛА - цели. Основными причинами возникновения систематических погрешностей местоопределения выступают ограничения, вводимые мерами избирательного доступа, задержка сигналов в ионосфере и тропосфере, неточность прогноза эфемерид и уход бортовой шкалы времени. Характерной особенностью большинства остаточных систематических погрешностей является возрастание их величины по мере удаления истребителя - основного объекта навигации от цели.
Техническим результатом заявляемой системы является оценка точностных характеристик БРЛС путем определения характеристик БРЛС, оценивание координат самолета-истребителя и ЛА - цели, находящихся на большом расстоянии друг от друга, и сравнение их с характеристиками БРЛС.
Существенные признаки.
Поставленная задача достигается тем, что в систему оценки точностных характеристик бортовой радиолокационной станции, содержащую два комплекса бортовых траекторных измерений (КБТИ), установленных на каждом борту двух летательных аппаратов (ЛА) - истребителя и цели, включающие блок приведения данных к единому времени (БПДЕВ), радиомодем линии передачи данных (ЛПД), бортовую часть спутниковой навигационной системы, связанную со входом БПДЕВ, аппаратуру потребителя, инерциальную навигационную систему, связанное входами с их выходами устройство сопряжения информации (УСИ), подключенной входом к УСИ бортовую цифровую вычислительную систему (БЦВС), блок управления, подключенный своим входом к выходу БЦВС, двумя входами - к системе документирования и к дисплею через формирователь изображения, а также подключенную к КБТИ бортовую радиолокационную станцию (БРЛС) на ЛА - истребителе для сравнения параметров ЛА - цели: дальности, угла азимута, угла места в полярной системе координат с их точностными значениями в фиксированные моменты времени, полученных от средств траекторных измерений, согласно изобретению введена контрольно-корректирующая наземная станция (ККС) для относительных измерений координат СНС в дифференциальном режиме в реальном времени с вычислителем дифференциальных поправок, связанным на входе с радиоприемником сигналов с СНС, на выходе - с радиопередатчиком дифференциальных поправок от ККС, по эфиру связанным с радиоприемниками дифференциальных поправок на ЛА - истребителе и цели, выходы которых подключены к входам УСИ, обеспечивая вычисления эталонных координат двух ЛА в декартовой системе с последующим переводом в полярную систему координат для сравнения их с параметрами БРЛС, подключенной к входу УСИ.
Перечень позиций на чертежах:
3 - блок приведения данных к единому времени (БПДЕВ);
4 - бортовая цифровая вычислительная система (БЦВС);
5 - устройство сопряжения информации (УСИ);
6 - приемник спутниковой навигационной системы
7 - система документирования;
8 - блок управления с пультом управления;
9 - инерциальная навигационная система;
10 - формирователь изображения,
11 - бортовая радиолокационная станция;
12 - дисплей;
13, 16 - радиоприемники дифференциальных поправок;
14 - летательный аппарат (ЛА) - цель дня БРЛС;
15 - КБТИ на ЛА-цели;
17 - контрольно-корректирующая станция (ККС);
18 - радиоприемник;
19 - вычислитель ККС;
20 - радиопередатчик дифференциальных поправок от ККС;
21, 22 - радиомодем ЛПД.
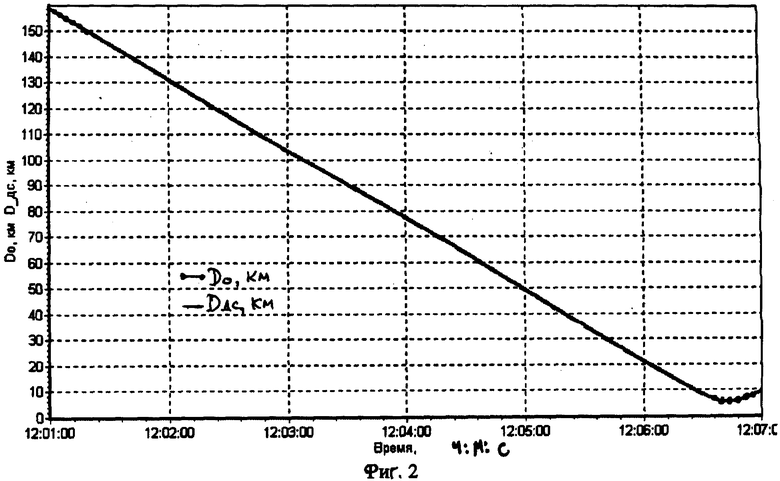
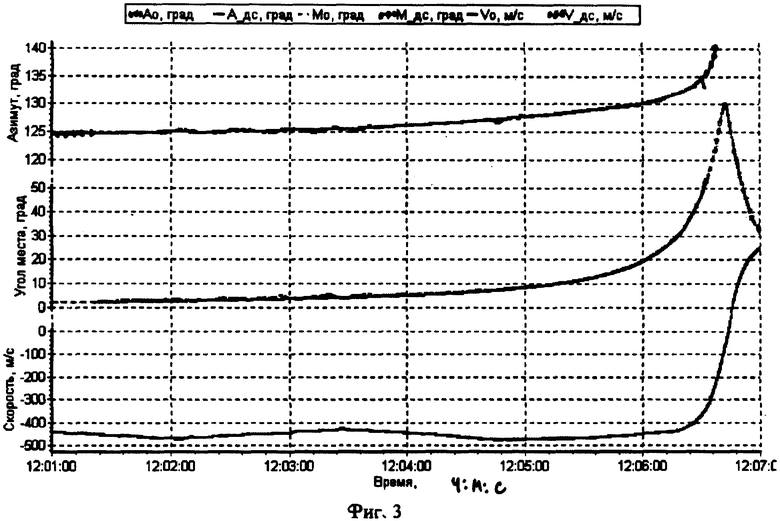
На фиг.2 и 3 изображены результаты расчета по предложенным алгоритмам, значения координат цели, которые совмещены с координатами, определенными БРЛС.
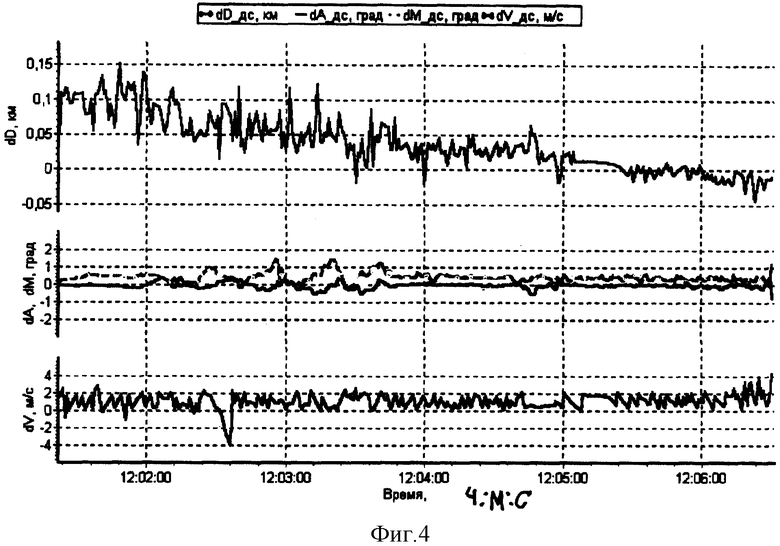
На фиг.4 приведены погрешности БРЛС на участке сопровождения цели, определенные как разность между одновременными значениями БРЛС и соответствующими значениями, пересчитанными из измерений СНС.
Сведения, подтверждающие возможность осуществления изобретения.
Система оценки точности характеристик БРЛС (см. фиг.1) содержит два комплекта комплекса бортовых траекторных измерений 2, 15, установленных на борту двух ЛА - истребителя и цели. КБТИ включает блок приведения данных к единому времени 3 (БПДЕВ), радиомодем линии передачи данных 21, радиоприемник информации 13, 16, связанный со входами БПДЕВ, приемник спутниковой навигационной системы (СНС) 6, инерциальную навигационную систему 9, связанное с их выходами устройство сопряжения информации 5, а его выход - с бортовой вычислительной системой 4. В систему включен блок управления с пультом управления 8, подключенный своим входом к выходу БЦВС, двумя выходами - к системе документирования 7 и к дисплею 12 через формирователь изображения 10. В систему включена контрольно-корректирующая станция 17, установленная на земле с вычислителем дифференциальных поправок 19, связанным на входе с радиоприемником 18 сигналов с СНС, на выходе - с радиопередатчиком 20 дифференциальных поправок от ККС, по эфиру связанным с радиоприемником дифференциальных поправок 13, 16 на ЛА - истребителя и цели, выходы которых подключены к входу УСИ 5.
Система работает следующим образом.
БРЛС содержит в своем составе передатчик, создающий мощные кратковременные радиоимпульсы, антенную систему, имеющую острую диаграмму направленности, которая «просматривает» пространство, где находится цель, а также приемное и индикаторное устройства. Когда излученные электромагнитные волны подают на цель, они частично отражаются. Отраженные волны возвращаются к антенне радиолокатора, которая с помощью переключателя во время промежутка между излучением импульсов передатчика подключается на вход приемника. Последний усиливает и детектирует принятые отраженные импульсы и подает их на вход индикатора.
Оценивание точностных характеристик основано на сравнении параметров, измеряемых БРЛС, с их точными значениями в фиксированные моменты времени, полученных от эталонных значений средств траекторных измерений КБТИ. При выборе средств измерений исходят из того требования, чтобы дисперсия погрешности определения действительных значений параметров была бы на порядок меньше, чем дисперсия погрешностей измерений испытываемой системы.
В ЛИ БО самолетов важное место занимает анализ таких характеристик БРЛС, как дальность обнаружения цели, устойчивость сопровождения, точность определения положения цели, которые не определяются с помощью КБТИ. Боевая эффективность военных самолетов при поражении воздушных и наземных целей зависит от характеристик БРЛС.
Сложность объективного оценивания точностных характеристик БРЛС при определении координат и скорости воздушной цели заключается в необходимости одновременного точного определения координат двух летательных аппаратов (ЛА), которые находятся на значительном расстоянии друг от друга, превышающим 100 км. На таком большом относительном расстоянии применение традиционных средств внешнетраекторных измерений не представляется возможным.
КБТИ предназначен для накопления информации о результатах обработки информации в темпе эксперимента и последующего послеполетного экспресс-анализа. При этом учитывается весь круг решаемых задач и требования к составу и точности измеряемых параметров. Аппаратура КБТИ содержит блоки и устройства приема, преобразования и регистрации информации. Блоки включают измерительные преобразователи, цифроаналоговые и аналого-цифровые преобразователи (ЦАП и АЦП), многоканальные устройства ввода-вывода цифровой информации, вычислители, платы управления и интерфейса, накопители и регистраторы.
КБТИ 2 строится на основе методов комплексной обработки информации от прецизионной инерциальной и спутниковой информации, поступающей в бортовую цифровую вычислительную систему (БЦВС) 4, объединяющую бортовые вычислители. Взаимодействие БЦВС 4 с датчиками и потребителями обеспечивается по каналам последовательного кода и каналам межмашинного обмена.
БЦВС 4 решает задачи приема информации от датчиков, обработки и анализа информации, формирования выходных данных; в них реализованы также сервисные программы обеспечения режимов работы оператора. Для этого используется вычислитель комплексной обработки информации (КОИ), результатом которой является высокоточные действительные значения параметров движения ЛА.
Действительные значения параметров используются для вычисления погрешностей систем. Если х - значение одного из параметров какой-либо оцениваемой характеристики ЛА, а x∂ - действительное полученное значение соответствующего параметра, то погрешность данной системы или характеристики определяется: Δх=х-хдейств.; хдейств.=х-Δх. Повышение точности формирования действительных значений пилотажно-навигационных параметров достигается использованием оптимальной КОИ с реализацией фильтра Калмана. Алгоритм КОИ с использованием избыточной информации данных систем ИНС, СНС обеспечивает оценку и компенсацию в процессе обработки погрешностей. Компенсация в сигналах ИНС 9 погрешностей параметров с помощью КОИ позволяет формировать высокоточные действительные значения навигационных и пилотажных параметров.
Алгоритм калмановской фильтрации обеспечивает наилучшие линейные оценки вектора состояния системы Хk в момент времени tk, когда Хk определяется из уравнения состояния:

и вектор измерения Zk представляется в виде:

Здесь ∂k, rk - независимые шумы с нулевыми средними значениями и матрицей ковариации

Фk+1,k - фундаментальная матрица, Нk - матрица измерения.
Алгоритм состоит из двух этапов и имеет следующий вид:
 - оценка вектора состояния между измерениями.
- оценка вектора состояния между измерениями.




- оценка при измерении; где Хk,k+1, Хk,k - априорная и апостериорная оценки вектора состояния Х на к-том шаге, Pk,k-1, Pk,k - априорная и апостериорная ковариационные матрицы на к-том шаге, Кk - весовая матрица.
Для преодоления численных трудностей, связанных с возможной потерей свойств симметрии и положительной определенности ковариационной матрицы, и повышения точностных характеристик используется метод фильтрации с квадратичным представлением ковариационной матрицы - метод квадратного корня из матрицы, основанный на представлении ковариационной матрицы Р в виде P=SS, где S верхнее или нижнее- треугольная квадратная матрица.
В вычислителе, входящем в состав БЦВС 4, определяются действительные значения траекторных параметров по информации СНС 6 и ИНС 9. Значения широты ϕ∂ долготы λ∂ и высоты h∂ определяются с помощью следующих соотношений:



где ϕснс, λснс, hснс - координаты ЛА, выдаваемые СНС 6 в момент времени tснс; VN, VE, VH - составляющие вектора скорости (северная, восточная, вертикальная), взятые из выходных параметров ИНС 9 rN, rE - радиусы кривизны земного эллипсоида, t - текущее время. Значения остальных входных параметров равны соответствующим значениям параметров СНС 6. Также определяются действительные значения КБТИ 15 (ϕ2∂, λ2∂, h2∂), установленном на ЛЛ 14.
Благодаря тому, что спутник по каналу связи сообщает постоянные параметры своей орбиты, на ЛА вычисляются его координаты ϕ, λ, h и скорости VХ, VY, VZ и по принимаемому сигналу на КБТИ 2 определяется дальность Dn(t) между ЛА и спутником и  ее изменения.
ее изменения.
Скорость  изменения дальности определяется либо по скорости "слежения" генерируемого на борту псевдошумового сигнала за принимаемым сигналом, либо по доплеровскому сдвигу принимаемого радиосигнала.
изменения дальности определяется либо по скорости "слежения" генерируемого на борту псевдошумового сигнала за принимаемым сигналом, либо по доплеровскому сдвигу принимаемого радиосигнала.
Элементы орбиты спутника, которые с высокой точностью можно считать постоянными в течение 1-2 часа, передаются со спутника с интервалом всем потребителям, по элементам орбиты и бортовому времени вычисляются декартовы координаты Xsn, Ysn, Zsn для любого наперед заданного (текущего) момента времени. А по расстояниям до 4-х спутников, находящихся в известных точках пространства, определяется местоположение ЛА. По значениям скорости изменения дальности до 3-х спутников вычисляется вектор  земной скорости ЛА.
земной скорости ЛА.
Для повышения точности характеристик используется дифференциальный метод определения координат местоположения ЛА, суть которого заключается в выявлении и учете в виде поправок сильнокорректированных составляющих погрешностей навигационных параметров с помощью наземных контрольно-корректирующих станций (ККС) 17. На ККС 17 с помощью аппаратуры потребителя СНС определяются координаты и сравниваются с данными геодезической привязки. Затем производится расчет соответствующих потребителям СНС 6 заданного района, что позволяет им, вводя поправки, повысить точность навигационного определения. При этом фактически реализуется разностный метод измерений (по отношению к ККС), при котором основная часть постоянных и медленно меняющихся ошибок измерений, носящих методический и системный характер и одинаковых для измерений на ЛА и ККС, исключается. Дифференциальный режим способен устранить наиболее значимые систематические погрешности навигационных измерений и в результате повысить точность определения координат ЛА до 3÷5 м, составляющих вектора скорости - до 0,1 м/с.
Навигационный аспект системы основан на приеме радиосигналов СНС на ККС 17 и основном объекте навигации ЛА и ЛА - цели 14, обработки принимаемых сигналов на ККС, основном объекте ЛА и ЛА - цели, расчета на ККС 17 поправок к измеренным псевдодальностям для каждого из наблюдаемых навигационных искусственных спутников Земли (НИСЗ) 1, передачи и приему рассчитанных поправок по каналу связи от ККС 17 на основной объект навигации ЛА и ЛА - цели 14, корректировки измеренных на основном объекте навигации ЛА и ЛА - цели 14 псевдодальностей на величину полученных от ККС 17 поправок и вычисления координат основного объекта навигации ЛА. При этом учитываются измерения точности радионавигационного поля в различных точках рабочей зоны дифференциальной подсистемы СНС - 6-1.
Задача по определению относительного местоположения двух ЛА решается с помощью двух комплектов КБТИ 2 и 15, установленных на ЛА (истребителе) и ЛА - цели, с применением относительных измерений СНС в дифференциальном режиме измерений. Схема измерений при выполнении таких ЛИ показана на фиг.1.
Реализация в КБТИ 2 дифференциального режима измерений СНС (в реальном времени или послеполетной обработке) позволяет проводить траекторные измерения на всем протяжении полета независимо от места проведения испытаний. Достоинством КБТИ 2 является регистрация всей необходимой информации систем бортового оборудования с точной привязкой регистрируемых параметров к единой временной шкале и определение траекторных параметров ЛА (синхронизация и запись информации).
БРЛС 11 выдает координаты цели в полярной системе координат, поэтому определяемые с помощью дифференциального режима измерений СНС географические координаты (широту, долготу и высоту) двух ЛА необходимо пересчитать в полярные координаты (дальность, азимут, угол места). Пересчет координат выполняется в БЦВС 4 по следующему алгоритму:
1. Определяются радиусы кривизны первых вертикалов ЛА (истребителя и цели)
 i=1, 2...
i=1, 2...
где Ni - радиус кривизны первых вертикалов, а, е2 - большая полуось и квадрат эксцентриситета эллипсоида, относительно которого определены координаты истребителя ϕ1, λ1, h1 и цели ϕ2, λ2, h2.
2. Вычисляются пространственные координаты ЛА в декартовой системе истребителя, оснащенного БРЛС



где N2 - радиус вертикалов ЛА истребителя, Н2 - высота истребителя, λ2,1 - долгота истребителя и цели.
3. Находятся координаты цели в декартовой системе координат, связанной с истребителем



где X12, Z12 - координаты цели.
4. Находятся координаты цели в полярной системе координат, связанной с истребителем
где D, AZ, UM - дальность, углы азимута и места цели.
5. Ошибки БРЛС находятся по формулам


Для примера, полученные в результате расчета по приведенным алгоритмам значения координат цели совмещены с координатами, определенными БРЛС 11, на фиг.2, 3.
Погрешности БРЛС 11 на участке сопровождения цели, определенные как разности Δ между одновременными значениями БРЛС 11 и соответствующими значениями, пересчитанными из измерений СНС, приведены на фиг.4.
В рассмотренном случае погрешность определения дальности цели не превышает 0,12 км и уменьшается по мере сближения ЛА. Погрешности определения угловых параметров не превышают уровня 0,5 град, погрешность определения скорости - 2 м/с.
ИНС 9 платформенного и бесплатформенного типа обеспечивает автономное счисление координат местоположения ЛА и высоты полета путем интегрирования измеряемых акселерометрами ускорений. Настройка инерциальной системы на период Шулера (84,4 мин) обеспечивает построение невозмущаемой ускорениями вертикали в полете. Бесплатформенная ИНС 9 по сравнению с платформенными обеспечивает определение большего количества параметров: географические координаты, путевую скорость и составляющие путевой скорости, угловые положения ЛА, угловые скорости и ускорения, вертикальную скорость и высоту. ИНС 9 строятся на базе лазерных гироскопов, обеспечивая их более высокую надежность и малое время готовности.
Устройство сопряжения информации (УСИ) 5 предназначено для преобразования последовательных кодов в коды БЦВС и обратного преобразования кода БЦВС 4 в последовательные коды и разовые команды. УСИ связан с испытываемой бортовой аппаратурой для электрического согласования контролируемых сигналов и преобразования в цифровую форму сигналов датчиков бортовых систем. УСИ 5 включает модуль обмена для сопряжения с линией передачи информации, выполняет адресованные ему команды, производит управление работой всех модулей блока, модуль последовательного кода осуществляет прием и выдачу последовательного кода. Модуль аналоговых и разовых сигналов осуществляет прием и выдачу аналоговых и разовых сигналов.
Ввод информации от СНС 6, ИНС 9, БРЛС 11 осуществляется с помощью адаптера, находящегося на входе УСИ 5. Последующий интерфейсный модуль обеспечивает ввод в полном объеме одновременно информационные потоки по ГОСТу-18977 (ARIN 427). Установленный таймер дает возможность выполнять временную привязку каждого вводимого слова, что позволяет определять циклограмму выдачи информации всего комплекса.
Информация бортовых систем СНС 6, ИНС 9, БРЛС 11 посредством адаптера вводится в буфер ввода вычислителя БЦВС 4. Выборка обрабатываемых параметров из буфера ввода и их первичная обработка осуществляется в соответствии с выбранным составом параметров. Затем подключается соответствующая процедура в программе обработки.
Привязка к единому времени действительных значений параметров, измеренных в комплексе, и аналогичных параметров, полученных от БРЛС 11, осуществляется от блока - источника единого времени БПДЕВ 3, выполненного на базе СНС 6. В блоке согласования и синхронизации совмещения по времени параметров во входном потоке производится линейной экстраполяцией:

где j-=1,...n, n - количество параметров во входном потоке, bi(t) - текущее значение j-го параметра, bp(t) - предыдущее значение j-го параметра, t - текущее время, соответствующее j - параметру, tp - значение времени в предыдущий момент, t' - значение времени, в которое должно произойти совмещение информации.
Информация, вводимая через УСИ 5, имеет временную привязку на уровне каждого вводимого слова - параметр времени, базирующийся на таймере интерфейса. Таймер фиксирует моменты приема информации; начальное значение параметра времени - нуль. Кроме того, необходима информация (параметр) о системном времени вычислительной системы на момент обработки информации СНС 6, параметр астрономического времени выдачи пачки информации СНС 6, параметр временной задержки выдачи пакета относительного времени определения координат. Точность привязки по времени обуславливается разрешаемой способностью таймера, расположенного в адаптере ввода информации УСИ 5.
В процессе испытаний в комплексе реализуется диалоговый режим работы оператора и режимы индикации. Для этого информация на дисплей 12 поступает из блока управления 8. Графический цифробуквенный (координатный) дисплей 12 позволяет наблюдать на экране процесс выполнения режимов, контролировать величины отдельных параметров систем ЛА.
Формирователь изображения 10 предназначается для взаимодействия по мультиплексной линии передачи изображения и формирования сигналов изображения. Он состоит из модуля обмена, графического контроллера модуля дисплейной памяти. Сигналы по мультиплексной шине передачи информации поступают на модуль обмена, который обеспечивает прием и преобразование их в информационный массив, оценивающий изображение, поступающий в графический контроллер. Графический контроллер по командам модуля обмена формирует цифровые сигналы, сигналы подсвета и сигналы управления.
Система документирования 7 позволяет выполнять следующие операции:
- компоновку документов в виде текстовых таблиц;
- оперативную загрузку форматов документов в реальном времени;
- оперативное изменение исходных данных для формирования документов;
- построение на принтере или плоттере различных графиков;
- вывод значений параметров в табличном виде на дисплей, принтер и др.
Блок управления 8
- осуществляет взаимодействие подсистем;
- распределяет потоки информации по каналам адаптеров ввода;
- выбирает вариант загрузочной конфигурации систем для различных задач регистрации и анализа информации;
- осуществляет загрузку информацией экрана дисплея.
С помощью пульта управления в блоке 8 обеспечиваются эксплуатационные режимы подготовки и проверки комплекса и циклограммы режимов работы.
Комплекс предполагает присутствие на борту ЛА оператора, который анализирует информацию в ходе испытаний, контролирует выполнение режимов полета и работы исследуемой БРЛС 11, задает тестовые управляющие воздействия, управляет работой комплекса в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2543943C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТРОЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ПРОСТРАНСТВЕННО-УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЁТА НА ТРАССАХ И ПРИАЭРОДРОМНЫХ ЗОНАХ ПРИ ЛЁТНЫХ ИСПЫТАНИЯХ ПИЛОТАЖНО-НАВИГАЦИОННОГО ОБОРУДОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584368C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| Способ восстановления параметров движения летательного аппарата | 2016 |
|
RU2620786C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
Изобретение относится к аппаратуре для проведения летных испытаний летательных аппаратов (ЛА) и их бортового оборудования. Достигаемым техническим результатом системы является оценка точностных характеристик бортовых радиолокационных станций (БРЛС). Система оценки точностных характеристик БРЛС содержит два комплекса бортовых траекторных измерений (КБТИ), установленных на каждом борту двух летательных аппаратов (ЛА) - истребителя и цели, включающих блок приведения данных к единому времени, радиомодем линии передачи данных, бортовую часть спутниковой навигационной системы, аппаратуру потребителя, инерциальную навигационную систему, устройство сопряжения информации, бортовую цифровую вычислительную систему, блок управления, систему документирования, дисплей, формирователь изображения, а также бортовую радиолокационную станцию на ЛА - истребителе. Заявленная система включает также контрольно-корректирующую наземную станцию (ККС) по эфиру, связанную с радиоприемниками дифференциальных поправок на ЛА - истребителе и цели. 4 ил.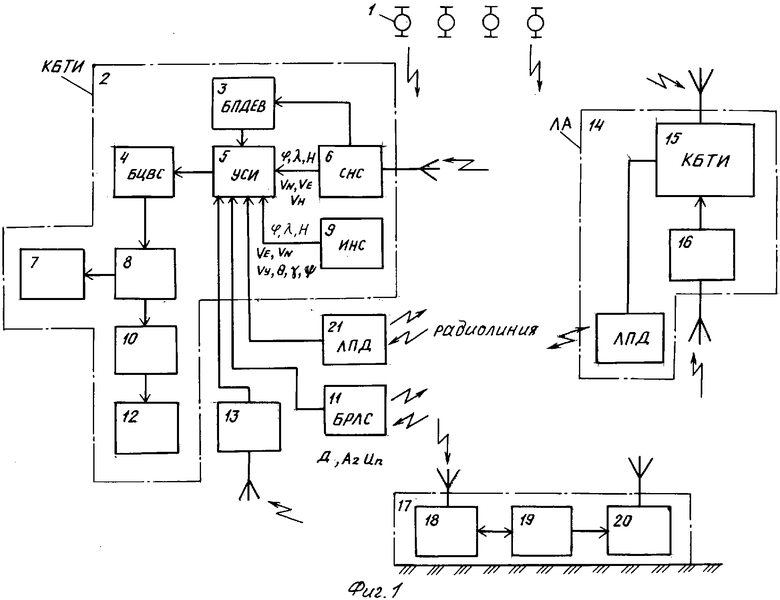
Система оценки точностных характеристик бортовой радиолокационной станции, содержащая два комплекта аппаратуры комплекса бортовых траекторных измерений (КБТИ), установленных на каждом борту двух летательных аппаратов (ЛА) - истребителя и цели, включающие блок приведения данных к единому времени (БПДЕВ), радиомодем линии передачи данных (ЛПД), приемник спутниковой навигационной системы (ПСНС), связанной с входом БПДЕВ, инерциальную навигационную систему (ИНС), устройство сопряжения информации (УСИ), связанное входами с выходами БПДЕВ, ЛПД, ПСНС, ИНС, подключенную входом к УСИ бортовую цифровую вычислительную машину (БЦВС), предназначенную для комплексной обработки и анализа информации, принимаемой от бортовых средств, для получения действительных значений параметров движения летательных аппаратов и формирования выходных данных для потребителя информации, блок управления, подключенный своим входом к выходу БЦВС, двумя выходами - к системе документирования и к дисплею через формирователь изображения и предназначенный для распределения потоков полученной информации и для загрузки информацией экрана дисплея, а также содержащая бортовую радиолокационную станцию (БРЛС) на летательном аппарате - истребителе для сравнения параметров ЛА - цели - дальности, угла азимута, угла места в полярной системе координат, измеряемых БРЛС, с их точностными значениями в фиксированные моменты времени, полученными в виде эталонных значений от бортовых средств траекторных измерений КБТИ, отличающаяся тем, что введена контрольно-корректирующая наземная станция (ККС) для относительных измерений спутниковыми навигационными системами (СНС) координат летательных аппаратов в дифференциальном режиме в реальном времени, выполненная в виде вычислителя дифференциальных поправок, связанного на входе с радиоприемником сигналов с СНС, а на выходе - с радиопередатчиком дифференциальных поправок от ККС, по эфиру связанным с радиоприемником дифференциальных поправок на летательном аппарате - истребителе и с радиоприемником дифференциальных поправок на летательном аппарате - цели, выходы которых подключены к входам соответствующих УСИ, с возможностью обеспечения вычисления в БЦВС эталонных координат двух ЛА в декартовой системе координат с последующим переводом в полярную систему координат для сравнения их с параметрами БРЛС, подключенной к входу УСИ летательного аппарата - истребителя, при этом ввод информации в соответствующую БЦВС от указанных бортовых средств и БРЛС осуществляется с помощью адаптера, находящегося на входе УСИ.
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2002 |
|
RU2222781C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ ПОПРАВОК | 1998 |
|
RU2138060C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| US 5549477 А, 27.08.1996 | |||
| WO 9524706 А1, 14.09.1995. | |||

