Изобретение относится к области авиации, в частности к агрегатам дозаправки летательных аппаратов топливом в полете по типу «шланг-конус».
В результате колебаний конуса-датчика агрегата заправки топливом в полете, вызванных турбулентностью потока, возмущениями, вызванными обтеканием самолета-заправщика и заправляемого самолета и колебанием заправочного шланга в возмущенном потоке, возникает усложнение процесса заправки.
Конус-датчик необходимо стабилизировать.
Известен способ стабилизации конуса-датчика агрегата заправки топливом в полете путем применения стабилизирующей аэродинамической юбки (ГОСТ 22488-77; патент US 2769604, приоритет 06.11.1956 г.; патент GB 98/00560, приоритет 04.03.1997 г.).
В этом способе стабилизация конуса-датчика осуществляется за счет обтекания и выстраивания по потоку узла контактирования, имеющего разрезную юбку в виде парашюта, что является недостаточно эффективным. В момент контакта конуса-датчика с приемником топлива требуются дополнительные затраты времени на стыковку, а также затраты сил и энергии летчиков, участвующих в заправке, что повышает психофизиологическую нагрузку на участников процесса.
Задачей изобретения является снижение времени стыковки и упрощение процесса заправки за счет стабилизации положения конуса-датчика до момента контакта его с приемником топлива.
Заявляемый способ заключается в том, что в трех перпендикулярных оси симметрии конуса-датчика направлениях выдуваются струи, интенсивность которых задается как линейная функция скорости и смещения конуса-датчика в соответствующем направлении, для определения которых устанавливаются акселерометры в двух взаимно перпендикулярных плоскостях и микропроцессор, который по измеренным акселерометрами ускорениям вычисляет изменяющиеся во времени скорость и перемещение конуса, по которым определяет реактивные силы струй в двух взаимно перпендикулярных плоскостях, необходимые для коррекции положения конуса, и в соответствии со значениями этих сил выдает сигнал на изменение параметров струй.
Заявляемый способ иллюстрируется фигурами 1 и 2. Фиг.1 представляет структурную схему способа стабилизации. Фиг.2 представляет схему направления управляющих сигналов. Акселерометры 1 (фиг.1) измеряют ускорения ay и az, значения которых передаются, соответственно, в интеграторы 2, которые вычисляют значения относительных скоростей νy1 и νz1. Эти значения не равны фактическим скоростям конуса-датчика в направлениях соответствующих осей, так как работа интеграторов начинается в произвольный момент времени, когда начальные значения этих скоростей не известны, и поэтому принимаются равными нулю.
Значения относительных скоростей νy1 и νz1 передаются, соответственно, в интеграторы 3, которые вычисляют значения относительных смещений Sy1 и Sz1 конуса-датчика вдоль соответствующих осей. Эти смещения не являются отклонениями конуса-датчика от равновесного положения, так как неизвестны ни начальные значения этих смещений в момент начала работы интеграторов, ни начальные скорости.
Значения Sy1 и Sz1 передаются в делители 4, где они делятся на время t, прошедшее с момента начала работы интеграторов 3.
Все элементы схемы начинают работать одновременно, а процессы интегрирования выполняются синхронно в режиме реального времени.
Полученные в делителях 4 значения Δνy и Δνz передаются, соответственно, в двухвходовые сумматоры 5, где они вычитаются, соответственно, из относительных скоростей νy1 и νz1, а полученные в результате величины νy и νz стремятся со временем к истинным скоростям поперечных колебаний конуса-датчика в направлениях соответствующих осей, так как начальные скорости, соответствующие началу процесса интегрирования, равны предельным значениям величин - Δνy и Δνz при t→∞.
Величины скоростей νy и νz передаются в четырехвходовой логический коммутатор 13, управляющий параметрами струй в направлениях осей 1, 2 и 3 (фиг.2).
Кроме того, значения скоростей νy и νz передаются, соответственно, в интеграторы 6, которые вычисляют значения относительных смещений Sy2 и Sz2 конуса-датчика вдоль соответствующих осей. Эти смещения не равны фактическим отклонениям конуса-датчика от равновесного положения, так как в начале процесса интегрирования неизвестно начальное значение этого отклонения.
Значения Sy2 и Sz2 передаются, соответственно, в интеграторы 7, которые вычисляют значения площадей Fy1(t) и Fz1(t) между кривыми Sy2(t) и Sz2(t) и осями времени t, проведенными из начальных точек Sy2(0)=0 и Sz2(0)=0.
Для определения фактических начальных значений смещений конуса-датчика от равновесного положения вычисляются функции Fy2(t) и Fz2(t), которые при достаточно больших значениях времени t стремятся к истинным значениям площадей между кривыми Sy(t) и Sz(t) и осями времени, проведенными через равновесные значения соответствующих смещений Sy=0 и Sz=0.
Для этого значения функций Fy1(t) и Fz1(t), соответственно, передаются в делители 8, где они делятся на время t, прошедшее с момента начала работы интеграторов. Полученные там значения ΔSy1=Fy1/t и ΔSz1=Fz1/t передаются в двухвходовые сумматоры 9, где они вычитаются из значений Sy2 и Sz2 соответственно. Полученные там значения Sy3 и Sz3 передаются, соответственно, в интеграторы 10, которые вычисляют значения площадей Fy2(t) и Fz2(t). Последние в свою очередь передаются в делители 11, где они 4 делятся на время t, а полученные в результате деления значения ΔSy2=Fy2/t и ΔSz2=Fz2/t передаются в двухвходовые сумматоры 12, где они вычитаются из значений Sy3 и Sz3.
Полученные в двухвходовых сумматорах значения Sy(t) и Sz(t) со временем стремятся к истинным значениям смещений конуса-датчика от равновесного положения. Они, так же, как и скорости νy(t) и νz(t), передаются в четырехвходовой логический коммутатор 13, управляющий параметрами струй.
Этот коммутатор вычисляет реактивные силы струй, необходимые для стабилизации конуса-датчика. Сначала вычисляются силы в направлении осей Oy и Oz по формулам Ty=kνy+kSs, Tz=kννz+kSsz,
Устройство изменения параметров струи 14 выпускает воздух в направлении оси Oy.
Устройствам 14, 15 и 16 соответствуют силы T1(t), T2(t) и T3(t)(фиг.2).
Степень изменения параметров струй выбирается из условий, обеспечивающих значения соответствующих реактивных сил:
1. если Ty>0 и Tz>0, то Т3=0, T2=Tz/cos(π/6)Т1=Ty+Tztg(π/6)
2. если Ty>0 и Tz<0, то T2=0, T3=-Tz/cos(π/6), T1=Ty-Tztg(π/6)
3. если Ty<0, то 
T1=0.
Таким образом, заявляемый способ позволяет стабилизировать положение конуса-датчика до момента контакта его с приемником топлива, что ведет к упрощению процесса заправки топливом в полете, сокращению времени заправки и уменьшению психофизиологических затрат летчиков при осуществлении процесса стыковки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНУС-ДАТЧИК АГРЕГАТА ЗАПРАВКИ ТОПЛИВОМ В ПОЛЕТЕ | 2012 |
|
RU2490179C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ВОЗДЕЙСТВИЯ СИЛЫ НА ШИНУ | 2008 |
|
RU2423246C1 |
| Датчик вектора воздушной скорости | 1989 |
|
SU1693554A1 |
| СПОСОБ СИНХРОНИЗАЦИИ СИСТЕМЫ РАДИОСВЯЗИ, РАСПРЕДЕЛЕННОЙ ПО ЯЧЕЙКАМ РАДИОСВЯЗИ | 2004 |
|
RU2368102C2 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ОТКЛОНЕНИЙ КУМУЛЯТИВНЫХ СУММ И ОПРЕДЕЛЕНИЕ ИХ КОЛИЧЕСТВА В ДВОИЧНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 2024 |
|
RU2833416C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2510618C2 |
| СПОСОБ СИНХРОНИЗАЦИИ СИСТЕМЫ РАДИОСВЯЗИ, РАСПРЕДЕЛЕННОЙ ПО ЯЧЕЙКАМ РАДИОСВЯЗИ | 2009 |
|
RU2447617C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ, ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2570996C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ПОЛЕЗНОГО КОМПОНЕНТА ВО ВЗОРВАННОЙ ГОРНОЙ МАССЕ ПРИ ЕЕ ВЫЕМКЕ НА КАРЬЕРАХ | 2008 |
|
RU2386032C1 |
| СПОСОБ НАЗЕМНОГО ИЛИ НАДВОДНОГО СТАРТА РАКЕТЫ С СИСТЕМОЙ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2096721C1 |

Изобретение относится к управляемым агрегатам заправки летательных аппаратов топливом в полете. При стабилизации конуса в трех перпендикулярных осях симметрии конуса направлениях выдуваются струи, интенсивность которых задается как линейная функция скорости и смещения конуса в соответствующем направлении. Для определения которых устанавливают акселерометры в двух взаимно перпендикулярных плоскостях и микропроцессор, который по измеренным акселерометрами ускорениям вычисляет изменяющиеся во времени скорость и перемещение конуса, по которым определяет реактивные силы струй в двух взаимно перпендикулярных плоскостях, необходимые для коррекции положения конуса и в соответствии со значениями этих сил выдает сигнал на изменение параметров струй. Достигается стабилизация конуса агрегата заправки. 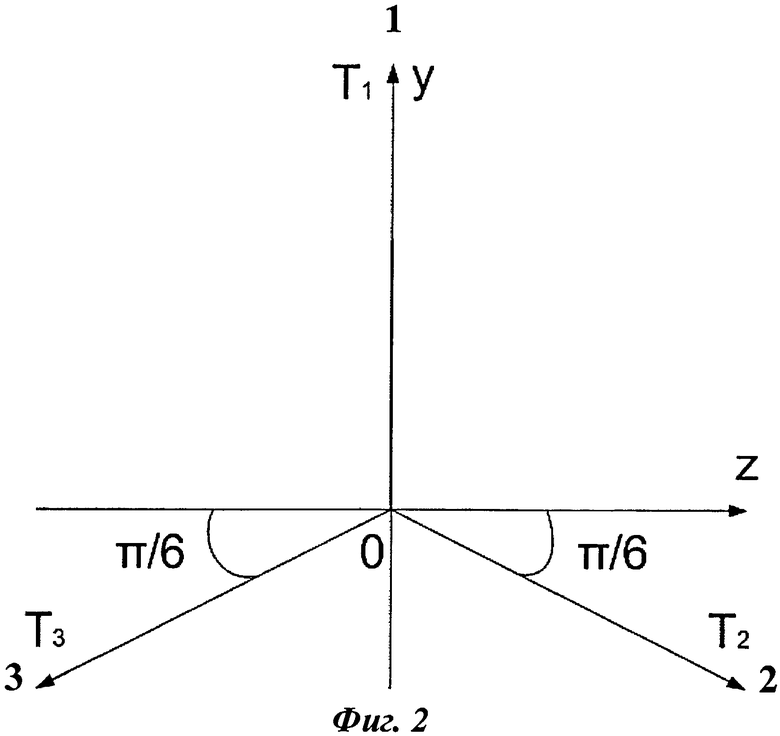
Способ стабилизации конуса-датчика агрегата заправки топливом в полете за счет обтекания и выстраивания по потоку узла контактирования, имеющего разрезную юбку в виде парашюта, отличающийся тем, что в трех перпендикулярных осях симметрии конуса-датчика направлениях выдуваются струи, интенсивность которых задается как линейная функция скорости и смещения конуса-датчика в соответствующем направлении, для определения которых устанавливают акселерометры в двух взаимно перпендикулярных плоскостях и микропроцессор, который по измеренным акселерометрами ускорениям вычисляет изменяющиеся во времени скорость и перемещение конуса, по которым определяет реактивные силы струй в двух взаимно перпендикулярных плоскостях, необходимые для коррекции положения конуса, и в соответствии со значениями этих сил выдает сигнал на изменение параметров струй.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

