Изобретение относится к области авиации, в частности, к системам дозаправки летательных аппаратов топливом в полете по типу «шланг-конус».
Известен конус-датчик агрегата заправки топливом в полете, содержащий корпус, шаровой шарнир, стабилизирующий аэродинамический конус (патент РФ №1778983, приоритет 02.09.1980 г).
В процессе заправки в результате колебаний конуса в момент контакта возникает усложнение процесса заправки, что приводит к ненадежности процесса заправки. Для исключения этой ненадежности необходимо стабилизировать положение конуса до момента контакта с приемником топлива.
Недостатком прототипа является невозможность стабилизации конуса до момента контакта.
Задачей изобретения является стабилизация конуса до момента контакта его с приемником топлива.
Поставленная задача решается конусом-датчиком, в котором на корпус установлен кожух. На передней стороне кожуха выполнены три кольцевых канала, на боковых сторонах кожуха выполнены три щелевых окна, на которых установлены три заслонки с тремя устройствами для их перемещения. На корпусе конуса установлены два акселерометра в двух взаимно перпендикулярных плоскостях относительно оси симметрии конуса. Выходы акселерометров подключены к входам двух систем управления перемещением заслонок, расположенных на корпусе конуса, каждая из которых состоит из интегратора ускорения, интегратора скорости, делителя, двухвходового сумматора, включенного в обе системы двухвходового логического коммутатора, причем выходы интеграторов ускорения соединены с входами интеграторов скорости и одного из входов сумматоров, выходы интеграторов скорости подсоединены к входам делителей, выходы делителей подсоединены ко вторым входам сумматоров, а выходы сумматоров подсоединены к соответствующим входам логического коммутатора.
Заявляемое устройство представлено фигурами 1, 2, 3, 4, 5, 6.
Фиг.1 - заявляемый конус-датчик в сборе.
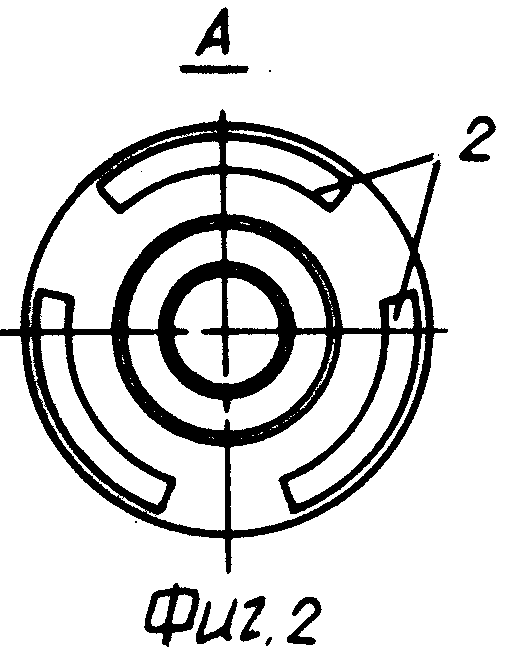
Фиг.2 - вид конуса с переднего торца.
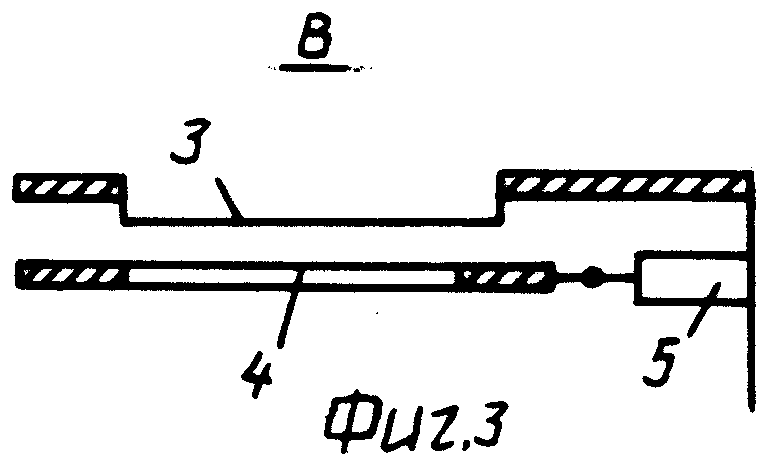
Фиг.3 - привод заслонок.
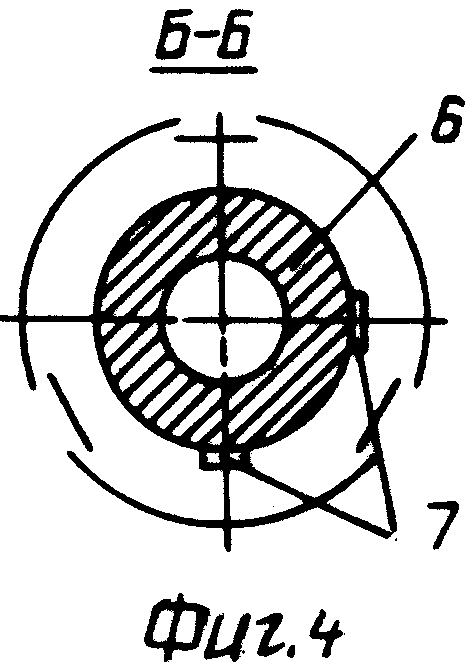
Фиг.4 - сечение конуса по линии Б-Б.
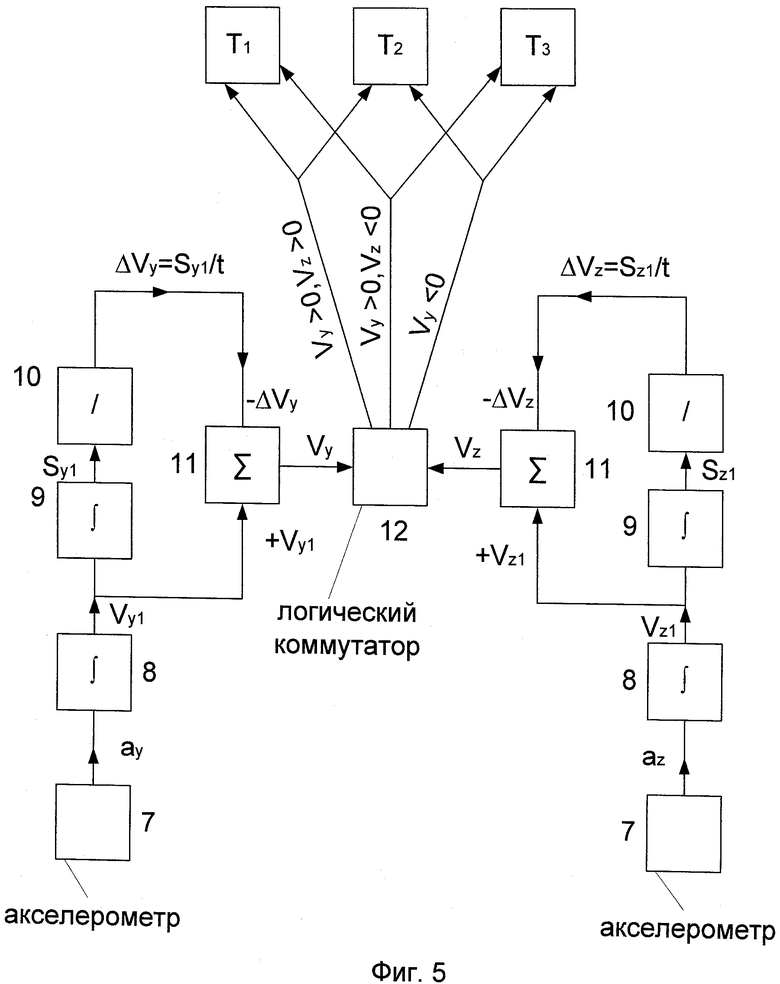
Фиг.5 - структурная схема системы управления устройствами перемещения заслонок.
Фиг.6 - схема направления управляющих струй.
Заявляемое устройство состоит из кожуха 1, в котором выполнены три щелевых канала 2, заканчивающихся щелевыми окнами 3, которые закрываются заслонками 4, соединенными с приводами заслонок 5. На корпусе конуса 6 установлены во взаимно перпендикулярных плоскостях два акселерометра 7.
Система управления устройствами перемещения заслонок (тремя приводами заслонок) (фиг.5) состоит из датчиков перегрузки -акселерометров 7, интеграторов ускорения 8, интеграторов скорости 9, делителей 10, двухвходовых сумматоров 11, логического коммутатора 12, приводов перемещения заслонок T1, Т2, Т3.
Заявляемый конус-датчик работает следующим образом.
Набегающий воздушный поток попадает через щелевые каналы 2 внутрь кожуха конуса 1 и выходит через щелевые окна 3 наружу конуса, создавая при этом реактивный импульс, воздействующий на перемещение конуса, в направлении, обратном открытому щелевому окну.
При открытии или изменении степени открытия того или иного окна путем перемещения заслонок 4, приводимых в движение приводами 5, конус принудительно перемещается в требуемом направлении, компенсируя возникающие колебания конуса в потоке.
Система управления перемещением заслонок щелевых окон работает следующим образом.
В двух взаимно перпендикулярных плоскостях симметрии конуса-датчика устанавливаются датчики перегрузки 7, ориентированные перпендикулярно оси симметрии конуса в направлениях осей OY и OZ (фиг.6).
Результаты измерения ускорений ay и az поступают соответственно в интеграторы 8, результатом работы которых являются относительные скорости конуса-датчика vy1 и vz1, которые не равны фактическим скоростям конуса-датчика в направлениях соответствующих осей, так как работа интеграторов начинается в произвольный момент времени, когда начальные значения этих скоростей не известны и поэтому принимаются равными нулю.
Значения относительных скоростей vy1 и vz1 поступают соответственно в интеграторы 9, результатом работы которых являются относительные смещения sy1 и sz1 конуса-датчика вдоль соответствующих осей. Они не являются отклонениями конуса-датчика от равновесного положения, так как не известны ни начальные значения этих смещений в момент начала работы интеграторов, ни начальные скорости.
Значения sy1 и sz1 поступают в делители 10, где делятся на время t, прошедшее с момента начала работы интеграторов 8.
Все элементы схемы начинают работать одновременно, а процессы интегрирования выполняются синхронно в режиме реального времени.
Полученные в делителях 10 значения Δvy и Δvz поступают соответственно в сумматоры 11, где вычитаются из относительных скоростей vy1 и vz1, а полученные в результате vy и vz стремятся со временем к истинным скоростям поперечных колебаний конуса-датчика в направлениях соответствующих осей, так как начальные скорости, соответствующие началу процесса интегрирования, равны предельным значениям величин -Δvy и -Δvz при t→∞.
Величины скоростей vy и vz поступают в логический коммутатор, управляющий перемещением заслонок Т1, Т2, Т3 трех щелевых окон, из которых выпускается воздух в направлениях осей 1, 2 и 3 (фиг.3).
Степень открытия соответствующих каналов выбирается из условий, обеспечивающих значения соответствующих реактивных сил Fv, которые удовлетворяют следующим условиям:
где силы Fy и Fz задаются пропорциональными составляющими скоростей vy и vz соответственно.
Таким образом, перемещая конус-датчик в требуемом направлении, тем самым компенсируя возникающие колебания конуса в потоке, и используя систему управления перемещением заслонок, решается задача стабилизации положения конуса-датчика агрегата заправки в полете перед контактом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ КОНУСА-ДАТЧИКА АГРЕГАТА ЗАПРАВКИ ТОПЛИВОМ В ПОЛЕТЕ | 2012 |
|
RU2523301C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ САМОЛЕТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2017 |
|
RU2662576C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники | 1990 |
|
SU1835534A1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| АНАЛИЗАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2012 |
|
RU2526730C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
Изобретение относится к области авиации, в частности к конус-датчику агрегата заправки топливом в полете. Конус-датчик агрегата содержит корпус, шаровой шарнир, стабилизирующий аэродинамический конус. На корпус конуса установлен кожух, на передней стороне которого выполнены три кольцевых канала, на боковых сторонах выполнены три щелевых окна, на которых установлены три заслонки с тремя устройствами для их перемещения, а на корпусе конуса установлены два акселерометра в двух взаимно перпендикулярных плоскостях симметрии конуса. Выходы акселерометров подключены к входам двух систем управления перемещением заслонок, расположенных на корпусе конуса, каждая из которых состоит из интегратора ускорения, интегратора скорости, делителя, двухвходового сумматора, включенного в обе системы двухвходового логического коммутатора. Выходы интеграторов ускорения соединены со входами интеграторов скорости и одного из входов сумматоров, выходы интеграторов скорости подсоединены к входам делителей, выходы делителей подсоединены ко вторым входам сумматоров, а выходы сумматоров подсоединены к соответствующим входам логического коммутатора. Технический результат заключается в улучшении стабилизации конуса до момента контакта его с приемником топлива. 6 ил.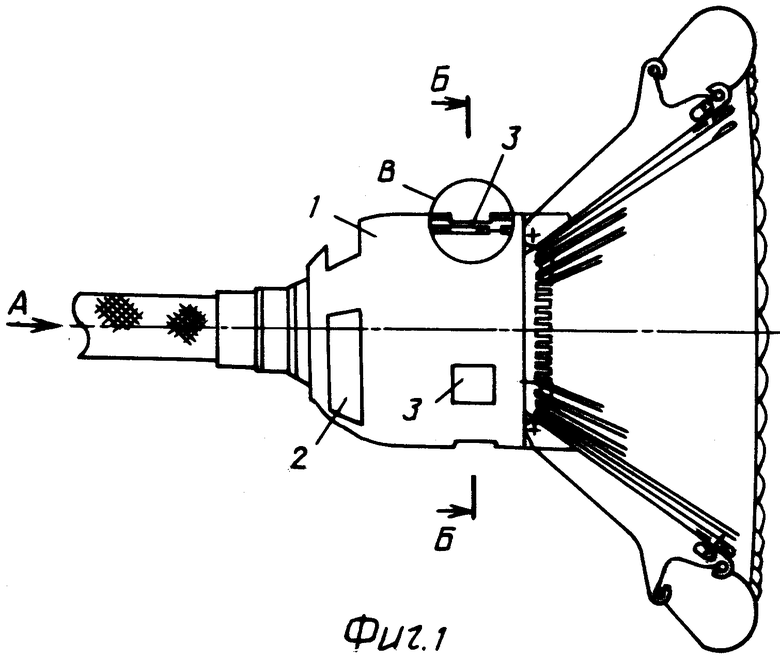
Конус-датчик агрегата заправки топливом в полете, содержащий корпус, шаровой шарнир, стабилизирующий аэродинамический конус, отличающийся тем, что на корпус конуса установлен кожух, на передней стороне которого выполнены три кольцевых канала, на боковых сторонах выполнены три щелевых окна, на которых установлены три заслонки с тремя устройствами для их перемещения, а на корпусе конуса установлены два акселерометра в двух взаимно перпендикулярных плоскостях симметрии конуса, выходы акселерометров подключены к входам двух систем управления перемещением заслонок, расположенных на корпусе конуса, каждая из которых состоит из интегратора ускорения, интегратора скорости, делителя, двухвходового сумматора, включенного в обе системы двухвходового логического коммутатора, причем выходы интеграторов ускорения соединены со входами интеграторов скорости и одного из входов сумматоров, выходы интеграторов скорости подсоединены к входам делителей, выходы делителей подсоединены ко вторым входам сумматоров, а выходы сумматоров подсоединены к соответствующим входам логического коммутатора.
| КОНУС-ДАТЧИК ТОПЛИВА АГРЕГАТА ЗАПРАВКИ | 1980 |
|
RU1778983C |
| US 2946605 A, 26.07.1960 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ПОЧКИ ТУШЕНЫЕ С ФАСОЛЬЮ И ГРИБАМИ" | 2007 |
|
RU2331212C1 |

