Изобретение относится к измерительной технике и может быть использовано на движущихся объектах для измерения модуля и угловых параметров вектора скорости газов или жидкостей.
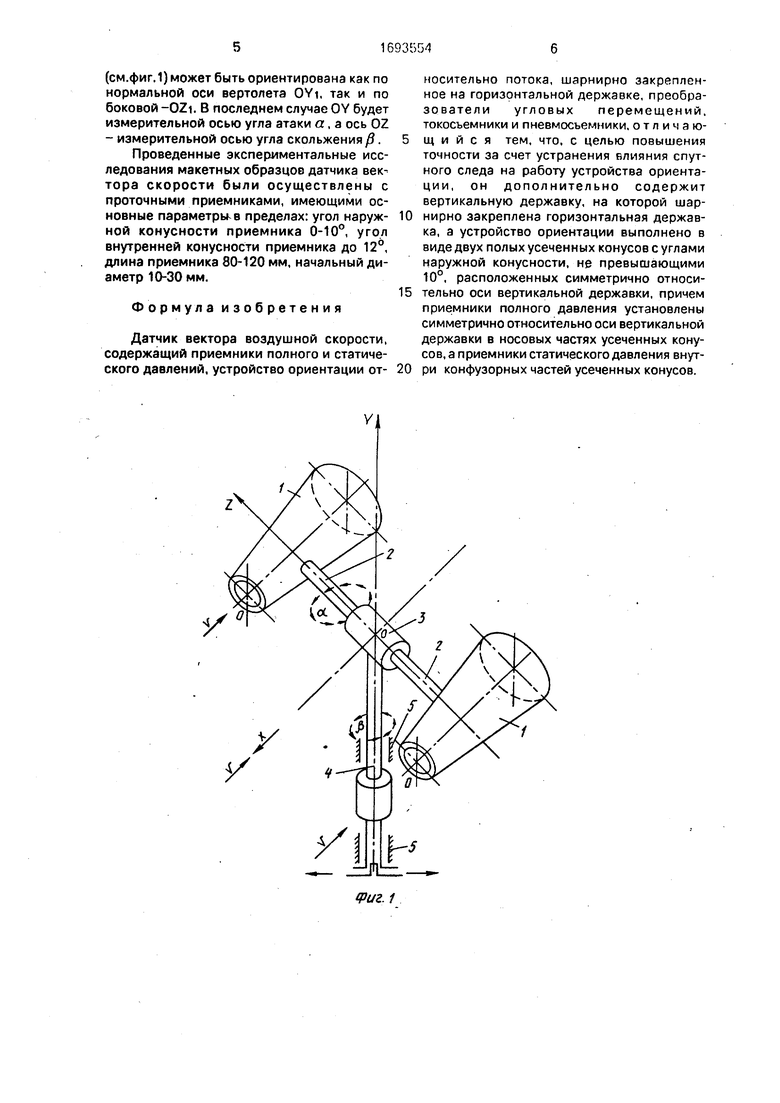
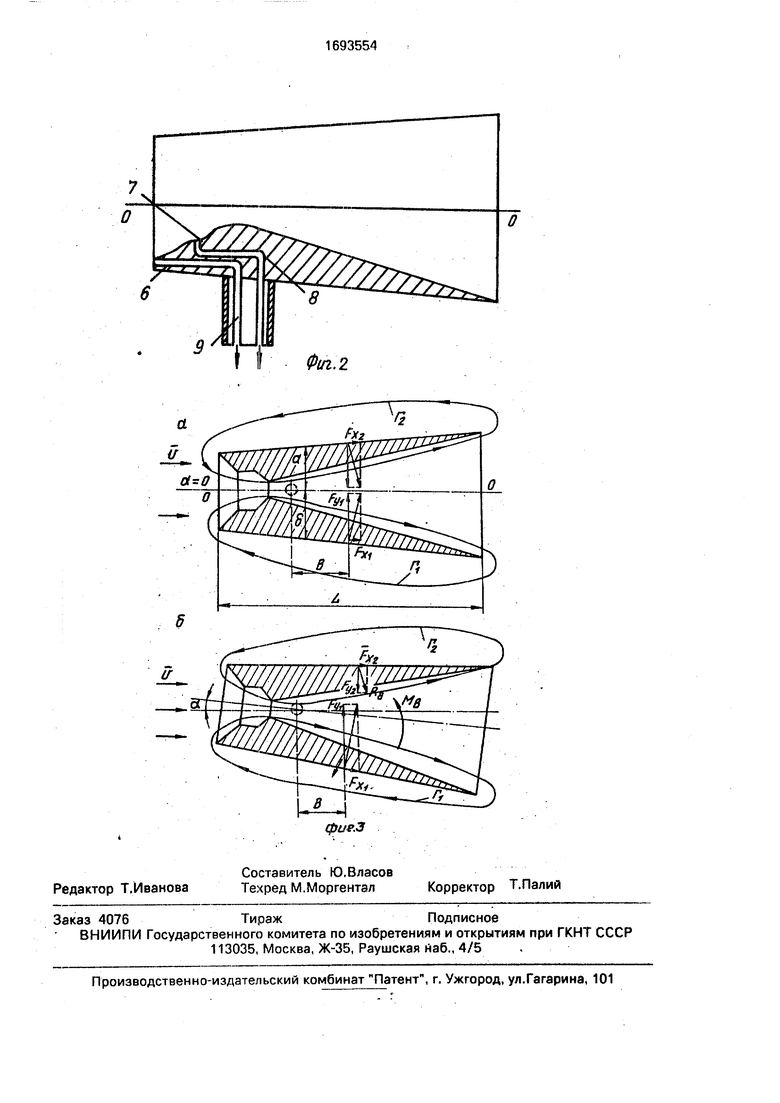
Целью изобретения является повышение точности за счет устранения спутного следа на работу устройства ориентации,На фиг.1 представлена i конструктивная схема датчика вектора скорости; на фиг.2 - одна из возможных конструкций приемника воздушного давления, используемого в датчике вектора скорости; на фиг.За, б - картины обтекания проточного приемника воздушным потоком и возникновения
стабилизирующего (восстанавливающего) момента М в поперечном сечении проточного приемника, имеющего конусообразную наружную поверхность.
Датчик состоит из конусообразных проточных приемников 1 давлений, жестко соединенных с полой внутренней осью 2, имеющей возможность свободного вращения в подшипниковой опоре 3, которая, в свою очередь, вместе с полой наружной осью 4 имеет возможность свободного вращения в опорах 5. Направление возможных вращений приемников показаны углами аи/ . Датчик также содержит приемники полного 6 и статического 7 давлений (см.
о ю
СА) СП
сл .&
фиг.2). Приемники 6 полного давлений установлены в носовых частях усеченных конусов симметрично относительно оси державки, а приемники 7 статического давления - внутри конфузорных частей усеченных конусов (см.фиг.2). Приемники б, 7 соединены с измерителями разности давлений (на фиг. не показаны) через каналы 8 и 9. Устройство содержит пневмосистемы, пневмосъемники, пневмопроводы и преобразователи угловых перемещений (на фиг. не показаны).
Датчик работает следующим образом.
Набегающий поток воздуха, скорость которого v, воздействует на конусообразные проточные приемники 1 воздушного давления, жестко соединенные между собой полой осью 2 (см.фиг.1). Восприятие полного давления происходит через приемник б (см.фиг.2), расположенный в носовой части конуса. Статическое давление воспринимается в конфузорной части на цилиндрическом участке через отверстие или щель. Воспринимаемые давления через каналы 8 и 9 (см.фиг.2) и полые оси 2 и 4 (см.фиг.1), через пневмосъемники и пневмосистемы передаются для последующей обработки информации о высотнб-скоростных параметрах.
Приемники вместе с осями 2, 4 имеют возможность поворачиваться в подшипниковых опорах 3 и 5, устанавливаясь по направлению набегающего потока v.
С помощью преобразователей угловых перемещений и токосъемников сигналы, пропорциональные углам атаки а и скольжения ft, также передаются для последующей обработки информации о высотно-скоростных параметрах. При возникновении рассогласования между направлением воздушного потока v и осями симметрии приемников 0-0 создается результирующий момент, устанавливающий приемники в направлении, соответствующем минимальному лобовому сопротивлению. Восстанавливающий момент, ориентирующий приемники давления вдоль воздушного потока, имеет две составляющие, создаваемые аэродинамическими силами, возникающими при симметричном обтекании наружной конической поверхности и внутренней проточной части приемников за счет циркуляции потоков.
Согласно картинам распределения сил, показанным на фиг.Зб, восстанавливающий момент определяется выражением
Мв (Fxi - FX2) a + (Fyi -Fy2) b ,
(D
где FXI и FX2 - аэродинамические силы лобового сопротивления, направленные вдоль осей 0-0 проточных приемников давления (см. фиг.За, б):
Fyi , Fy2 - аэродинамические силы, направленные перпендикулярно осям 0-0 приемников;
a, b - плечи действия названных выше сил (см.фиг.За).
Составляющая восстанавливающей силы (Fy1 - Fy2) в этом случае будет зависеть от величин циркуляции скорости потока FI , Га (см.фиг.Зб) и ориентировочно с учетом двух приемников давлений определяться выражением
Fy1-Fy2 A/9vL(ri-r2), (2)
V2
где p - плотность среды;
rcp - радиус среднего сечения наружного конуса приемника; v - скорость потока;
L-длина приемника,Гч , Г2 - циркуляции потоков в верхней и нижней частях сечения приемника соответственно.
При симметричном обтекании приемников (см.фиг.За) Fxi FX2 Fy1 Fy2 , т.е. восстанавливающий момент . В случае нарушения симметрии обтекания эти равенстванарушаются,например, Fxi Fx2 , Fyi Fy2 что приводит к возникновению момента Мв, устанавливающего оси 0-0 приемников давления по набегающему потоку воздуха (см.фиг.Зб).
Благодаря проточному каналу приемника циркуляция потока будет больше, чем
при свободном обтекании тела, имеющего такой же конусообразный профиль, но без проточного канала. Это ведет к увеличению восстанавливающего момента примерно в два раза.
Таким образом, представляется возможным выполнить самоустанавливающийся датчик вектора воздушной скорости с совмещенными функциями измерения аэродинамических углов атаки, скольжения,
полного и статического давлений на основе одного конструктивного элемента - проточного приемника воздушного давления с конусообразной наружной поверхностью. При этом измерение скорости происходит со
снижением порога чувствительности примерно до 5-10 км/ч за счет пневмоусиления. Нет принципиальной разницы в выборе ориентации измерительных осей датчика относительно осей связанной системы координат вертолета. При этом ось OY
(см.фиг, 1) может быть ориентирована как по нормальной оси вертолета OYi, так и по боковой -OZi. В последнем случае OY будет измерительной осью угла атаки а, а ось OZ - измерительной осью угла скольжения /3.
Проведенные экспериментальные исследования макетных образцов датчика вектора скорости были осуществлены с проточными приемниками, имеющими основные параметры-в пределах: угол наружной конусности приемника 0-10°, угол внутренней конусности приемника до 12°, длина приемника 80-120 мм, начальный диаметр 10-30 мм.
Формула изобретения
Датчик вектора воздушной скорости, содержащий приемники полного и статического давлений, устройство ориентации относительно потока, шарнирно закрепленное на горизонтальной державке, преобразователи угловых перемещений, токосъемники и пневмосьемники. отличающ и и с я тем, что. с целью повышения точности за счет устранения влияния спут- ного следа на работу устройства ориентации, он дополнительно содержит вертикальную державку, на которой шарнирно закреплена горизонтальная державка, а устройство ориентации выполнено в виде двух полых усеченных конусов с углами наружной конусности, не превышающими 10°, расположенных симметрично относительно оси вертикальной державки, причем приемники полного давления установлены симметрично относительно оси вертикальной державки в носовых частях усеченных конусов, а приемники статического давления внутри конфузорных частей усеченных конусов.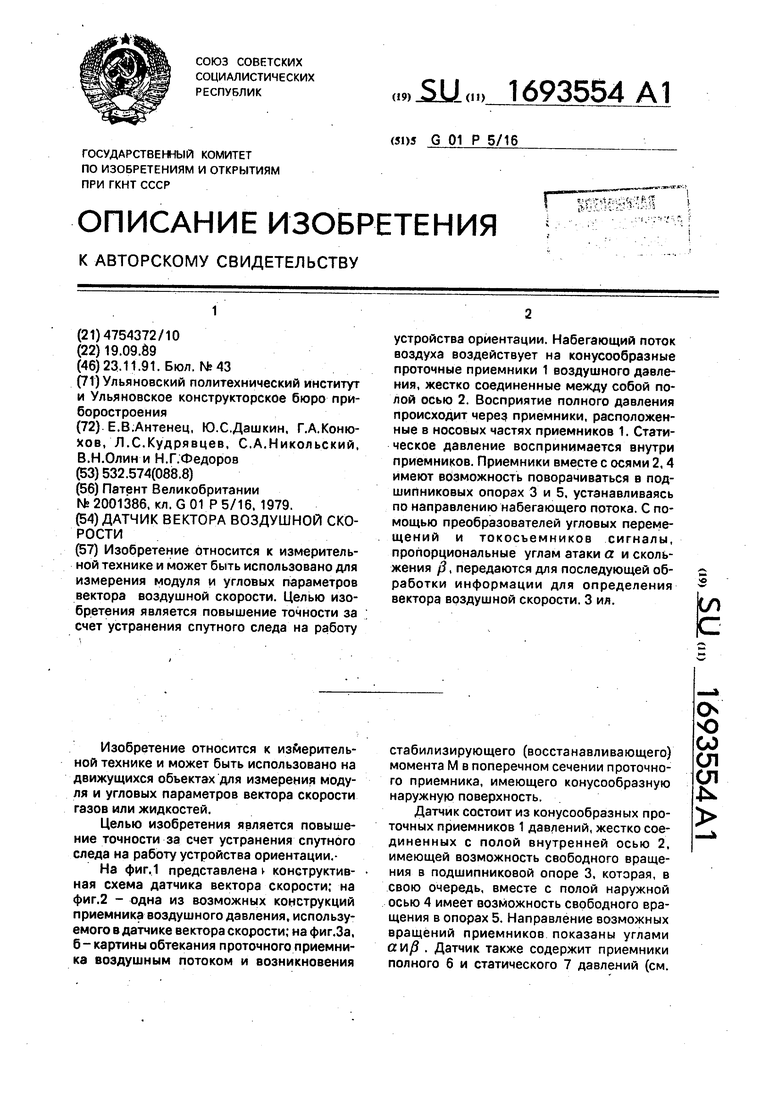

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК ВОЗДУШНОГО ДАВЛЕНИЯ | 2013 |
|
RU2542791C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| ПРИЕМНИК ДАВЛЕНИЙ | 1998 |
|
RU2133948C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| Устройство для измерения направления и скорости газового потока | 1983 |
|
SU1113748A1 |
| Способ измерения параметров потока и устройство для его осуществления | 1984 |
|
SU1278721A1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| ПРИЕМНИК ВОЗДУШНЫХ ДАВЛЕНИЙ | 2003 |
|
RU2260780C2 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения модуля и угловых параметров вектора воздушной скорости. Целью изобретения является повышение точности за счет устранения спутного следа на работу устройства ориентации. Набегающий поток воздуха воздействует на конусообразные проточные приемники 1 воздушного давления, жестко соединенные между собой полой осью 2. Восприятие полного давления происходит через приемники, расположенные в носовых частях приемников 1. Статическое давление воспринимается внутри приемников. Приемники вместе с осями 2,4 имеют возможность поворачиваться в подшипниковых опорах 3 и 5, устанавливаясь по направлению набегающего потока. С помощью преобразователей угловых перемещений и токосъемников сигналы, пропорциональные углам атаки а и скольжения /3, передаются для последующей обработки информации для определения вектора воздушной скорости. 3 ил. (Л С
У
Фп.2
а
и
| Патент Великобритании № 2001386, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
