Область использования
Изобретение относится к авионике, а конкретно к системе обнаружения помех для посадки и взлета вертолета, которая позволяет контролировать рельеф поверхности в зоне посадки или взлета вертолета, наличие препятствий на этой поверхности, их удаление и расположение, а также горизонтальное расположение вертолета, его ориентацию относительно поверхности посадки или взлета. Использование системы обнаружения помех для посадки и взлета вертолета особенно актуально в плохих погодных условиях, в условиях города, на пересеченной местности, при использовании для посадки или взлета ограниченной площадки, в частности палубы корабля.
Уровень техники
Известна система обнаружения помех для взлета, посадки или маневрирования вертолета, включающая установку снизу фюзеляжа лазерного дальномера, сканирующего зону вокруг вертолета в радиальном направлении и передающего данные вычислительной системе для визуального отображения данных на доступном пилоту мониторе о препятствиях для движения вертолета (US 5371581 A, МПК G01C 3/08, 1994).
Известное решение не позволяет в результате сканирования поверхности построить точные данные о рельефе поверхности, поскольку сканирование может осуществляться лишь по касательной к рельефу поверхности, на которую осуществляется посадка. Известное решение в большей степени предназначено для обнаружения препятствий в направлении полета, выбора курса движения и не позволяет построить точную картинку рельефа поверхности под вертолетом в зоне посадки.
Известна аналогичная система обнаружения помех для взлета, посадки или маневрирования вертолета, которая обладает аналогичными недостатками, включающая устройства сканирования, каждое из которых состоит из средств для передачи сигнала и получения отраженного ультразвукового сигнала, установленные на роторе несущего винта вертолета смежно оси его вращения для сканирования объектов в радиальном направлении, а также установленные на боковой поверхности фюзеляжа вертолета для сканирования объектов в боковом относительно фюзеляжа направлении и связанные с вычислительной системой для визуального отображения данных на доступном пилоту мониторе о препятствиях для движения вертолета, в частности для движения лопастей несущего винта вертолета, а также для передачи данных автопилоту (EP 2388760 A1, МПК G08G 5/04, 2011).
Известна система обнаружения помех для взлета, посадки и маневрирования вертолета, включающая устройства сканирования, каждое из которых состоит из средств для передачи сигнала и получения отраженного ультразвукового сигнала, использующих принцип радиолокации, лазерного или ультразвукового сканирования. Устройства сканирования располагаются в носовой части фюзеляжа, в задней части фюзеляжа и снизу в средней части фюзеляжа. Сканирование производится по боковым направлениям и вниз. Данные сканирования отражаются на доступном пилоту мониторе в виде полного образа поверхности (WO 2008116456 A1, МПК G01S 13/93, 2008).
В этом решении в результате сканирования также нельзя получить точные данные о рельефе поверхности в пределах площади, покрываемой длиной лопастей несущего винта, поскольку устройства сканирования позволяют получить данные лишь непосредственно под фюзеляжем. При этом на удалении от фюзеляжа но в пределах площади, покрываемой длиной лопастей несущего винта, точные данные о рельефе нельзя получить, поскольку сканирование на удалении от фюзеляжа осуществляется по касательной к поверхности. Таким образом, известное решение не достаточно эффективно, поскольку не позволяет обеспечить достоверную картину о поверхности, на которую осуществляется посадка, а соответственно не позволяет обеспечить безопасность полета, особенно в условиях плохой видимости, в частности при высокой запыленности, в сложных погодных условиях, в условиях города, на пересеченной местности, при посадке или взлете с использованием ограниченной площадки.
Сущность изобретения
Технический результат настоящего изобретения заключается в расширении арсенала средств обнаружения помех для посадки и взлета вертолета, которое отличается высокой точностью получения данных о рельефе поверхности под вертолетом на площади, необходимой для проведения маневра посадки или взлета.
Достижение указанного технического результата обеспечивает система обнаружения помех для посадки и взлета вертолета, включающая ультразвуковые устройства сканирования, каждое из которых состоит, по меньшей мере, из средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, установленные, по меньшей мере, в лопастях несущего винта вертолета на удалении от оси его вращения или смежно их концам и связанные с бортовой вычислительной системой вертолета или с самостоятельной вычислительной системой для визуального отображения данных на доступном пилоту мониторе о рельефе расположенной под вертолетом поверхности и/или данных об опасных препятствиях.
В наилучшем варианте осуществления изобретения средства для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала ультразвуковых устройств сканирования установлены шарнирно с возможностью стабилизации положения относительно горизонта.
При этом каждое ультразвуковое устройство сканирования может быть снабжено, по меньшей мере, одним гироскопическим устройством для отслеживания положения средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, по меньшей мере, одним приводом для управления положением средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, а также автономным блоком управления, связанным с упомянутыми гироскопическим устройством и приводом для управления положением средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала.
В предпочтительном варианте осуществления изобретения система обнаружения помех для посадки и взлета вертолета может быть снабжена дополнительными ультразвуковыми устройствами сканирования, каждое из которых состоит, по меньшей мере, из средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, установленные снизу в фюзеляже вертолета или на фюзеляже вертолета, по меньшей мере, один - в зоне кабины и, по меньшей мере, один - на хвостовой части, и связанные для передачи данных с бортовой вычислительной системой вертолета или с самостоятельной вычислительной системой для визуального отображения данных на доступном пилоту мониторе о рельефе расположенной под вертолетом поверхности и/или данных об опасных препятствиях, попадающих в слепую зону основных ультразвуковых устройств сканирования, расположенных в лопастях несущего винта вертолета.
Каждое дополнительное ультразвуковое устройство сканирования может быть снабжено, по меньшей мере, одним гироскопическим устройством для определения углового положения дополнительного ультразвукового устройства сканирования относительно горизонта, связанным для передачи данных с бортовой вычислительной системой вертолета или с самостоятельной вычислительной системой для получения данных об угловом положении фюзеляжа вертолета относительно горизонта.
Осуществление изобретения
Возможность осуществления изобретения подтверждается конкретным примером, который проиллюстрирован графическими материалами.
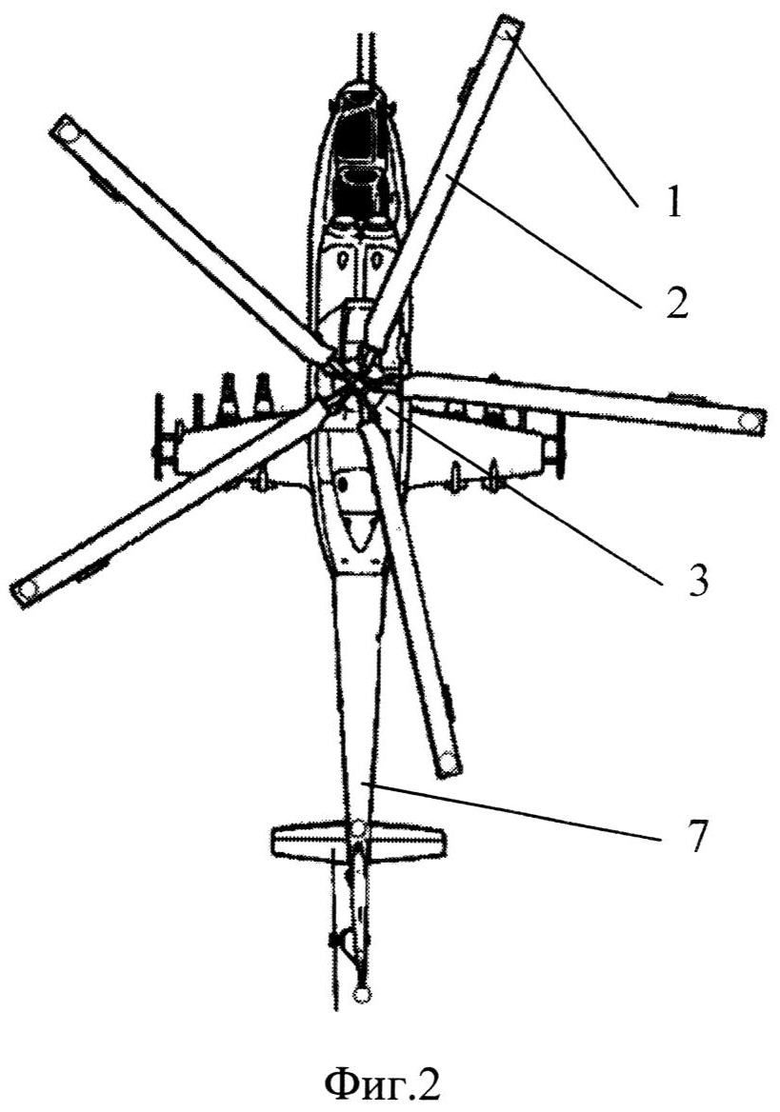
На фиг.1 и 2 показаны схемы расположения на несущем винте и на фюзеляже вертолета основных и дополнительных ультразвуковых устройств сканирования: на фиг.1 - вид на фюзеляж вертолета снизу, на фиг.2 - вид на фюзеляж вертолета сверху.
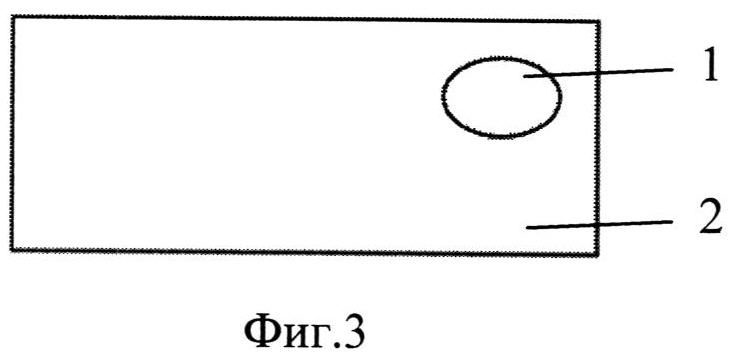
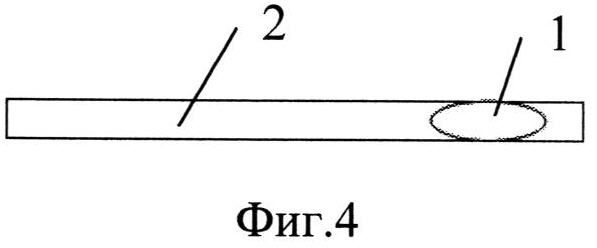
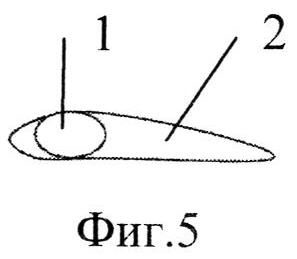
На фиг.3, 4, 5 показаны схема расположения в лопасти несущего винта вертолета ультразвукового устройства сканирования, соответственно, на фиг.3 - вид сверху, на фиг.4 - вид спереди, на фиг.5 - вид сбоку (с торца лопасти).
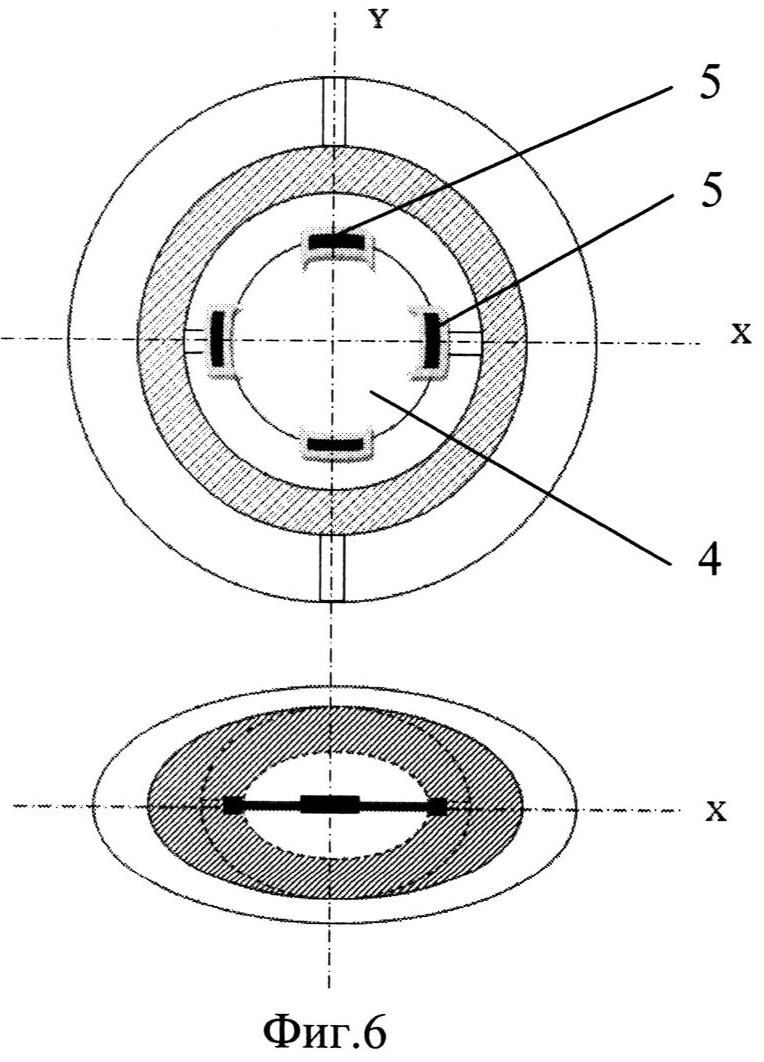
На фиг.6 показана схема основного, располагаемого в лопасти несущего винта вертолета, ультразвукового устройства сканирования с указанием осей и расположения относительно них ультразвукового устройства сканирования в проекции сверху и в проекции сбоку (по виду на лопасть спереди).
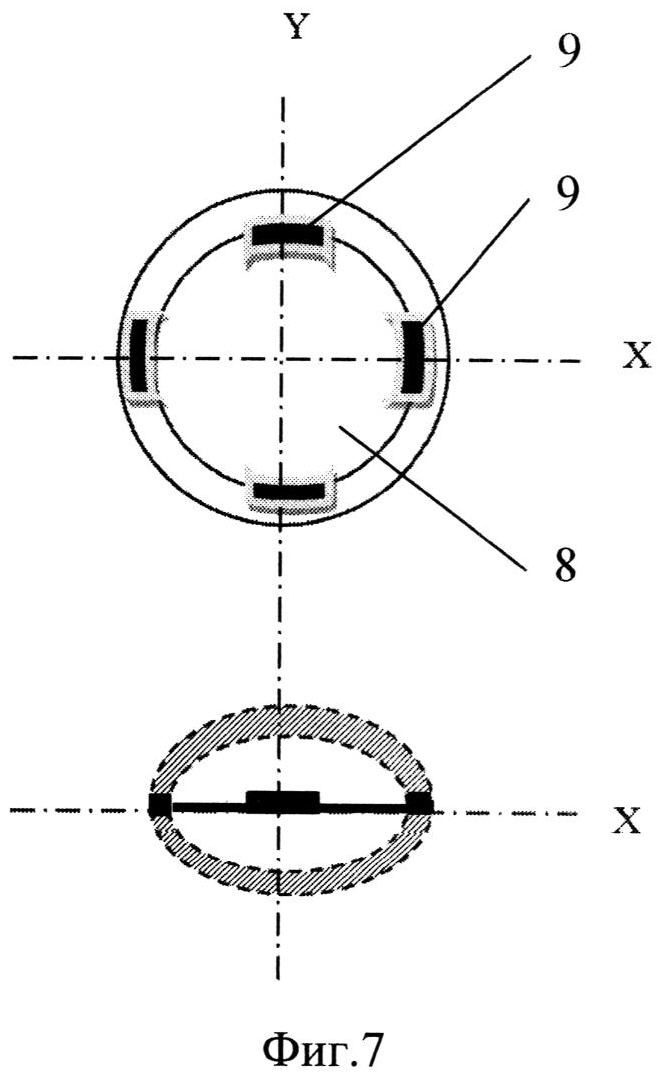
На фиг.7 показана схема дополнительного, располагаемого на фюзеляже вертолета, ультразвукового устройства сканирования с указанием осей и расположения относительно них ультразвукового устройства сканирования в проекции сверху и в проекции сбоку.
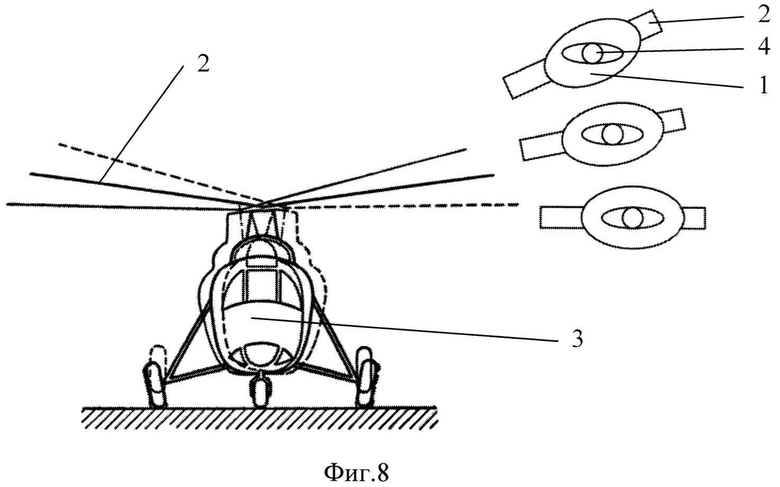
На фиг.8 показана схема положения лопастей несущего винта вертолета в полете с иллюстрацией изменения положения расположенного в лопасти ультразвукового устройства сканирования.
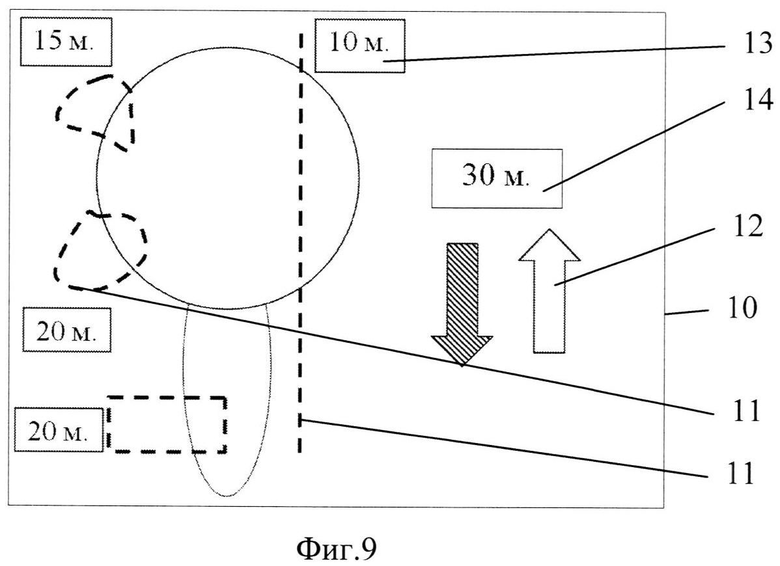
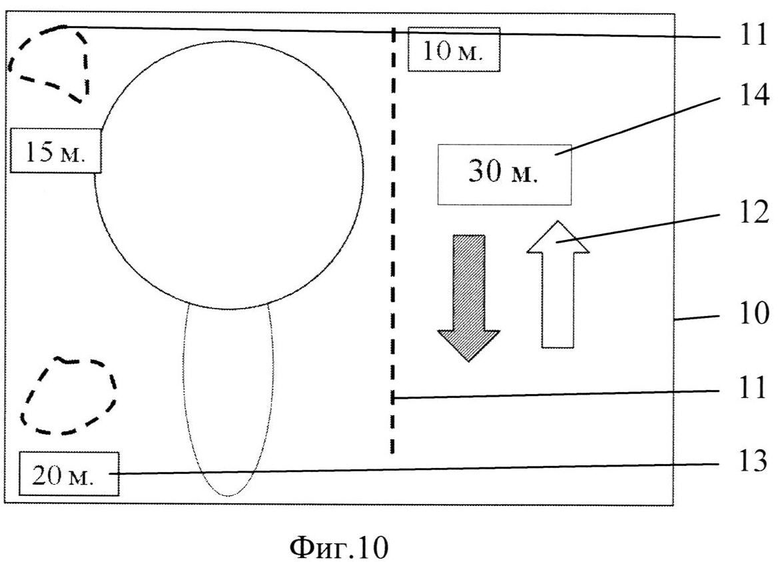
На фиг.9, 10 показаны схемы информации на доступном пилоту мониторе о препятствиях для посадки: на фиг.9 - препятствия есть, а на фиг.10 - препятствий нет.
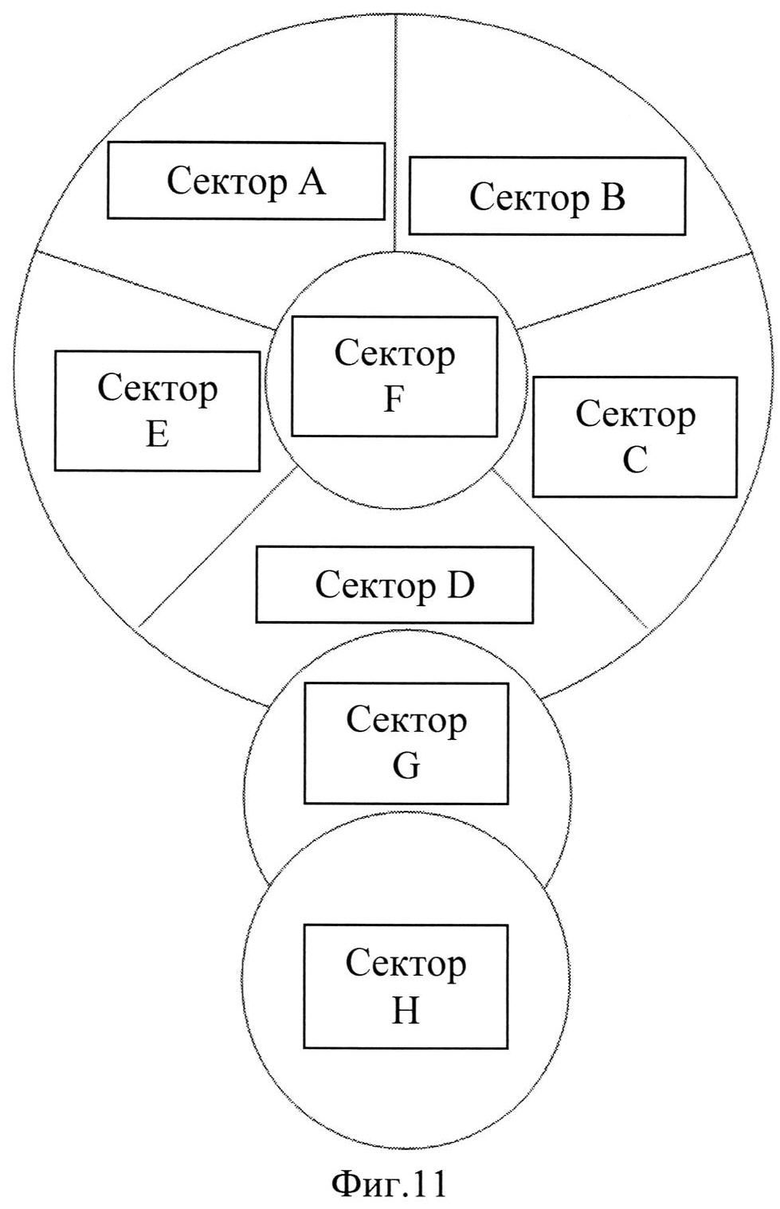
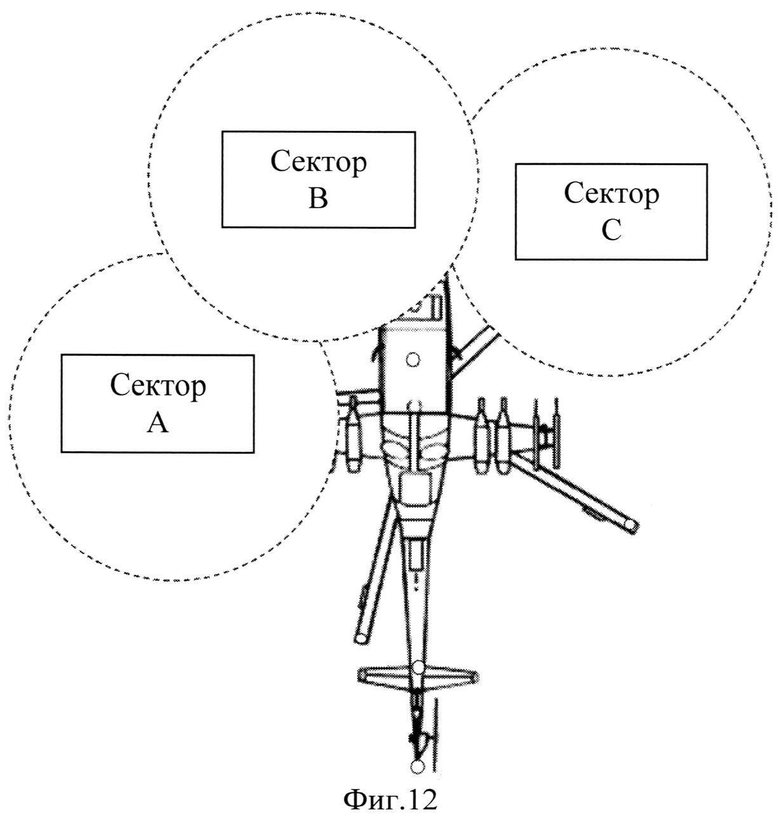
На фиг.11 и 12 показаны схемы расположения секторов работы отдельных основных и дополнительных ультразвуковых устройств сканирования, которыми оборудован вертолет.
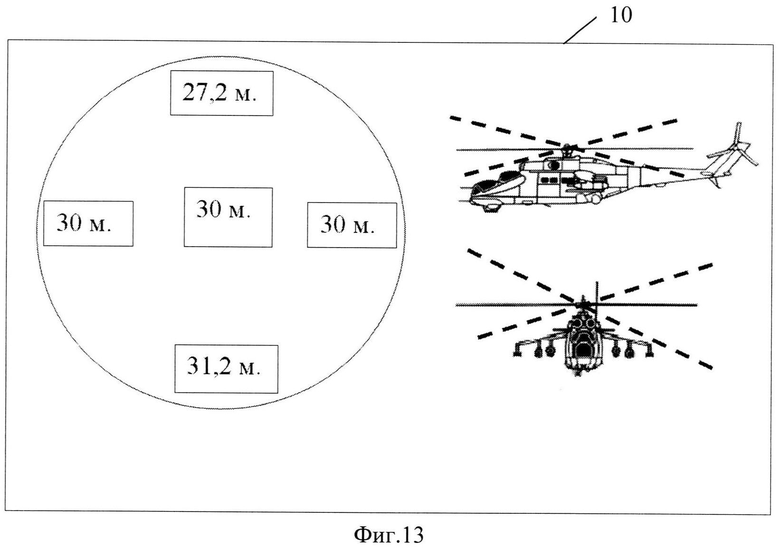
На фиг.13 показана схема информации на доступном пилоту мониторе о пространственной ориентации вертолета.
Система обнаружения помех для посадки и взлета вертолета включает ультразвуковые устройства сканирования 1 (фиг.1-5), установленные в лопастях 2 несущего винта вертолета 3 смежно их концам, то есть на удалении от оси вращения несущего винта.
Каждое ультразвуковое устройство сканирования 1 состоит из средств 4 (фиг.6, 7) для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, которые установлены шарнирно с возможностью стабилизации положения относительно горизонта, для чего оно содержит гироскопические устройства 5, приводы (на схемах не показаны) для управления положением, а также автономный блок управления (на схемах не показан).
Средства 4 для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала должны вращаться вокруг двух горизонтальных осей X и Y (фиг.6), чтобы при изменении положения лопасти 2, как это происходит при вращении несущего винта в процессе полета вертолета, он постоянно находился в горизонтальной плоскости, как это показано на схеме на фиг.8. Для обеспечения такой установки средства 4 закрепляются по схеме карданова подвеса с двумя степенями свободы, но могут быть использованы и иные известные приемы установки.
Каждое средство 4 представляет собой электронный фазированный датчик в виде ультразвукового векторно-объемного детектора, способного как излучать, так и принимать ультразвуковые сигналы на частоте 1,5-5 МГц. Объемные датчики используются для получения объемного (трехмерного) изображения и могут быть выполнены с одномерной или двухмерной решеткой пьезоэлементов, обеспечивая трехмерное сканирование с электронным управлением. Могут быть использованы иные ультразвуковые детекторы, позволяющие осуществлять сканирование в пределах объемного (телесного) угла, которые позволяют с высокой скоростью строить трехмерное изображение для проведения в реальном времени трехмерного эхосканирования.
Горизонтальное положение средства 4 контролируют гироскопические устройства 5. В качестве гироскопических устройств 5 использованы известные микроэлектромеханические гироскопы, контролирующие вращение средства 4 вокруг оси X или Y. Установлено по два таких гироскопических устройства 5 на каждую ось для надежности с целью резервирования и правильной развесовки конструкции.
Поворот средства 4 обеспечивается приводами, которые устанавливаются аналогично гироскопическим устройствам 5 и с той же целью по два на каждую ось. Для приводов могут быть использованы известные приводы вращения, например гистерезисный двигатель. Могут также использоваться электродвигатели постоянного тока, вентильные двигатели или асинхронные двигатели с короткозамкнутым ротором.
Система обнаружения помех для посадки и взлета вертолета также включает дополнительные ультразвуковые устройства сканирования 6 (фиг.1), каждое из которых, как и описанное выше, также состоит из средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала.
Дополнительные ультразвуковые устройства сканирования 6 установлены снизу в фюзеляже вертолета 3 или на фюзеляже вертолета 3: одно - в зоне кабины и два на хвостовой части 7 фюзеляжа (за пределами проекции несущего винта). Может быть установлено только одно дополнительное ультразвуковое устройство сканирования 6 на хвостовой части 7, а может быть и большее количество, в том числе в зоне кабины, в том числе сверху хвостовой части 7.
Дополнительные ультразвуковые устройства сканирования 6 также включают средства 8 (фиг.7) для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, а также гироскопические устройства 9 для определения углового положения дополнительного ультразвукового устройства сканирования 6 относительно горизонта. Гироскопические устройства 9 также располагаются по двум осям по два на каждую ось. Дополнительные ультразвуковые устройства сканирования 6, их средства 8 и гироскопические устройства 9 установлены жестко (неподвижно) относительно фюзеляжа 3 вертолета, поскольку они используются в значительной степени для определения ориентации фюзеляжа 3 относительно горизонтальной плоскости. Но возможно также использование дополнительных ультразвуковых устройств сканирования 6, которые выполнены аналогично основным ультразвуковым устройствам сканирования 1.
Основные 1 и дополнительные 6 ультразвуковые устройства сканирования связаны для передачи данных с бортовой вычислительной системой (на схемах не показана) или с самостоятельной вычислительной системой (на схемах не показана) для визуального отображения данных на доступном пилоту мониторе 10 (фиг.9, 10) о рельефе расположенной под вертолетом поверхности и/или данных об опасных препятствиях, попадающих в слепую зону основных ультразвуковых устройств сканирования, расположенных в лопастях несущего винта вертолета.
На доступном пилоту мониторе 10 при посадке или взлете выводятся предупреждения о помехах в области работы несущего и реверсного винтов и хвостовой части фюзеляжа. При этом препятствия 11 и стрелка 12, указывающая направление движения вертолета, будут гореть красным (фиг.9). Также на экране монитора 10 отражены расстояния до преград (фиг.9, поз.13), а над стрелками 12, показывающими направление движения, будет указано расстояние до земли (фиг.9, поз.14). Если же помех не будет, то индикация препятствий 11 и стрелка 12, указывающая направление движения вертолета, будут гореть зеленым цветом (фиг.10).
Алгоритм работы соответствующей изобретению системы обнаружения помех для посадки и взлета вертолета следующий: сначала ультразвуковое устройство сканирования 1, на одной из лопастей 2, которая находиться в определенном секторе, посылает ультразвуковой сигнал, после чего ультразвуковые устройства сканирования 1 на всех лопастях работают в этом секторе на прием и так далее. Последовательность включений такова: первой посылает импульс лопасть 2, находящаяся посредине сектора A (фиг.11, 12), затем лопасть 2, находящаяся посредине сектора B, затем лопасть 2, находящаяся посредине сектора C и так далее. В секторах F, G и H работают ультразвуковые устройства сканирования 6, расположенные на фюзеляже вертолета 3 и его хвостовой части 7 (работают самостоятельно и на передачу и на прием). Система может быть построена с полной визуализацией на мониторе 10 картинки рельефа поверхности, располагающейся под вертолетом.
Таким образом, выполненная в соответствии с изобретением система обнаружения помех для посадки и взлета вертолета дает пилоту полную и достоверную картину о поверхности, на которую он осуществляет посадку, вне зависимости от погодных условий, степени видимости, запыленности и тому подобное. Для удобства на основании данных, получаемых с основных 1 и дополнительных 6 ультразвуковых устройств сканирования, может быть организована работа прибора с монитором 10, на котором будет отображаться пространственная ориентация вертолета (фиг.13). С использованием изобретения возможно создание автопилота взлета, посадки и полета на низких высотах в сложных погодных условиях, посадки на ограниченной территории (палуба корабля), есть возможность роботизировать управление вертолетом. В случае использования на типах вертолета с двумя несущими винтами, вращающимися вокруг одной оси, ультразвуковые устройства сканирования 1 целесообразно располагать на лопастях обоих винтов, что при условии наложения фильтра, исключающего силуэт нижнего винта из изображения на экране, будет давать более четкое изображение, чем в случае расположения ультразвуковых устройств сканирования 1 лишь на нижнем винте. Вместо указанной фильтрации можно предусмотреть синхронизацию, выключающую ультразвуковые устройства сканирования 1 в точках пересечения лопастей винтов.
Приведенный пример осуществления изобретения не является исчерпывающим. Возможны иные варианты практической реализации изобретения, которые будут соответствовать объему патентных прав.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННЫЙ УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2019 |
|
RU2722520C1 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| ПРОТИВОЛОДОЧНЫЙ РАКЕТНЫЙ КОМПЛЕКС С АВТОНОМНЫМ РЕАКТИВНЫМ САМОЛЕТОМ-НОСИТЕЛЕМ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2699616C2 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2019 |
|
RU2708516C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| ПАЛУБНАЯ АВИАЦИОННАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ СИСТЕМА | 2019 |
|
RU2717280C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
Изобретение относится к области авиации, в частности к системам бортового оборудования вертолетов. Система обнаружения помех для посадки и взлета вертолета включает ультразвуковые устройства сканирования (1), каждое из которых состоит, по меньшей мере, из средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала. Средства передачи и получения сигнала установлены, по меньшей мере, в лопастях (2) несущего винта вертолета (3) на удалении от оси его вращения или смежно их концам и связаны с бортовой вычислительной системой вертолета или с самостоятельной вычислительной системой для визуального отображения данных на доступном пилоту мониторе о рельефе расположенной под вертолетом поверхности и/или данных об опасных препятствиях. Повышается точность данных о рельефе поверхности под вертолетом на площади, необходимой для выполнения маневрирования при выполнении взлета и посадки. 4 з.п. ф-лы, 13 ил.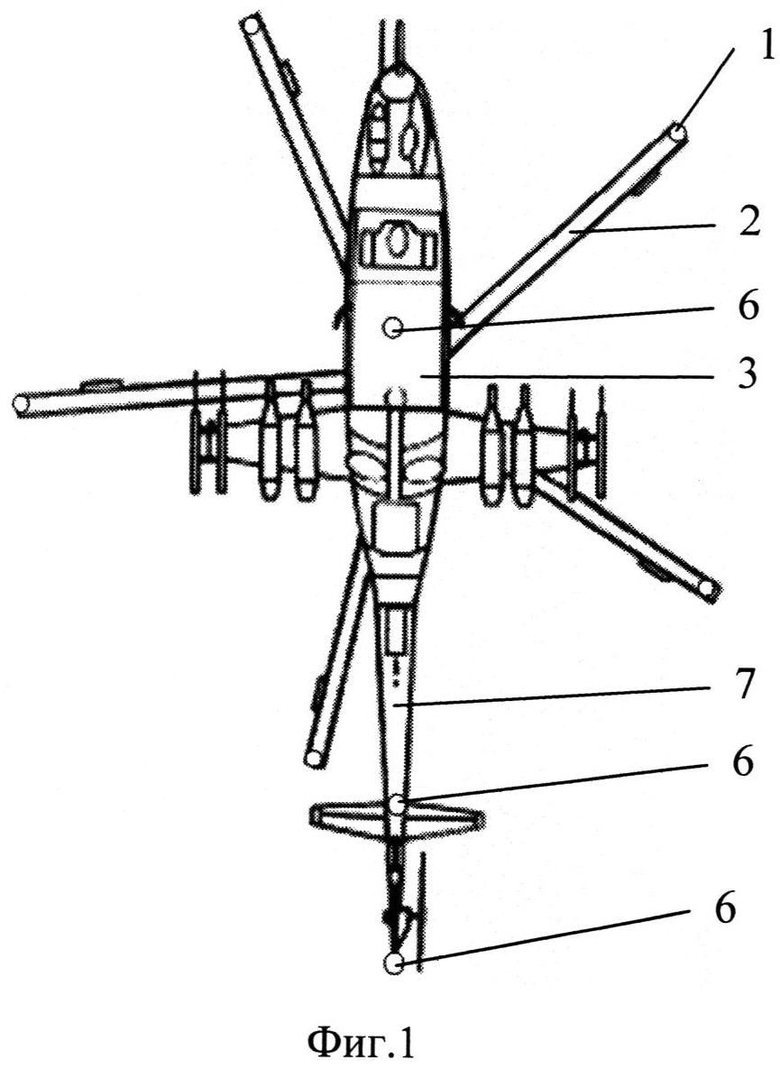
1. Система обнаружения помех для посадки и взлета вертолета, включающая ультразвуковые устройства сканирования, каждое из которых состоит, по меньшей мере, из средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, установленные, по меньшей мере, в лопастях несущего винта вертолета на удалении от оси его вращения или смежно их концам и связанные с бортовой вычислительной системой вертолета или с самостоятельной вычислительной системой для визуального отображения данных на доступном пилоту мониторе о рельефе расположенной под вертолетом поверхности и/или данных об опасных препятствиях.
2. Система по п.1, отличающаяся тем, что средства для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала ультразвуковых устройств сканирования установлены шарнирно с возможностью стабилизации положения относительно горизонта.
3. Система по п.2, отличающаяся тем, что каждое ультразвуковое устройство сканирования снабжено, по меньшей мере, одним гироскопическим устройством для отслеживания положения средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, по меньшей мере, одним приводом для управления положением средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, а также автономным блоком управления, связанным с упомянутыми гироскопическим устройством и приводом для управления положением средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала.
4. Система по любому из пп.1-3, отличающаяся тем, что она снабжена дополнительными ультразвуковыми устройствами сканирования, каждое из которых состоит, по меньшей мере, из средств для передачи ультразвукового сигнала в направлении вниз и получения отраженного ультразвукового сигнала, установленными снизу в фюзеляже вертолета или на фюзеляже вертолета, по меньшей мере, один - в зоне кабины и, по меньшей мере, один - на хвостовой части, и связанные для передачи данных с бортовой вычислительной системой вертолета или с самостоятельной вычислительной системой для визуального отображения данных на доступном пилоту мониторе о рельефе расположенной под вертолетом поверхности и/или данных об опасных препятствиях, попадающих в слепую зону основных ультразвуковых устройств сканирования, расположенных в лопастях несущего винта вертолета.
5. Система по п.4, отличающаяся тем, что каждое дополнительное ультразвуковое устройство сканирования снабжено, по меньшей мере, одним гироскопическим устройством для определения углового положения дополнительного ультразвукового устройства сканирования относительно горизонта, связанным для передачи данных с бортовой вычислительной системой вертолета или с самостоятельной вычислительной системой для получения данных об угловом положении фюзеляжа вертолета относительно горизонта.
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| EP 1906151 A2, 02.04.2008 | |||
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| US 5371581 A, 06.12.1994 | |||

