Изобретение относится к области радиолокации и может быть использовано на вертолетах.
Из уровня техники известна вертолетная радиолокационная станция (патент RU №2253132, опубликован 27.05.2005, МПК: G01S 13/90) на базе вращающихся антенн для излучения и приема радиолокационных импульсов. Причем антенны расположены на конце каждого из вращающихся с несущим винтом плеч и соединены с радиолокационной станцией, содержащей, по меньшей мере, передающее устройство, электронный узел с центральным блоком управления и видеопроцессором, а также дисплей. При этом на несущем винте установлен датчик, формирующий сигналы, характеризующие угловые положения несущего винта при его вращении. Сигналы передаются в электронный узел радиолокационной станции и подвергаются в нем обработке. В результате чего обеспечивается синхронизация угла обзора антенн с положением инерциальной оси. При этом сформированные сигналы поступают в центральный блок управления, который выдает управляющие сигналы, в соответствии с которыми частота повторения импульсов, излучаемых передающим устройством, синхронизируется с частотой вращения несущего винта для точного согласования количества излучаемых за один оборот радиолокационных импульсов с фактической частотой вращения несущего винта.
К недостаткам данной радиолокационной станции можно отнести ограничения по зоне обзора пространства при изменении положения вертолета по крену и тангажу.
Известна вертолетная радиолокационная станция обнаружения наземных препятствий (заявка RU №2005110343, опубликована 20.10.2006, МПК: G01S 13/04, G01S 13/90). Радиолокационная станция включает антенную систему, состоящую из двух сканирующих антенных решеток, размещенных в лопастях вертолета, вращающийся переход, передающее устройство, циркулятор, приемное устройство, задающий генератор, цифровой процессор сигналов, включающий устройство обработки суммарно-разностной диаграммы, состоящее из устройства модуля, коммутатора, двух устройств памяти, устройства суммы, двух устройств разности, двух устройств умножения, синхронизатора датчика угла, цифрового процессора данных и индикатора. Причем в процессор сигналов введено устройство обужения, состоящее из устройства разности и двух устройств умножения. Данная РЛС предназначена только для обнаружения наземных препятствий.
Наиболее близкой к предлагаемой является радиолокационная станция для вертолета (патент RU №2256939, опубликован 20.07.2005, МПК: H01S 13/04, H01S 13/90), которая и выбрана в качестве прототипа. Радиолокационная станция для вертолета состоит из двух сканирующих антенных решеток, размещенных в лопастях вертолета, передающего устройства, циркулятора, приемного устройства, задающего генератора, цифрового процессора сигналов, синхронизатора, датчика угла, цифрового процессора данных, индикатора, вращающегося перехода, двух разделительных фильтров.
К недостаткам радиолокационной станции можно отнести невозможность реализации режима обнаружения опасных для полета метеообразований, их интенсивности и дальности до них, большие ограничения по обнаружению опасных для полета препятствий по направлению полета летательного аппарата, проводов линий электропередач воздушных объектов на высоте большей высоты носителя. Такая радиолокационная станция имеет большие потери в энергетическом потенциале из-за канализации СВЧ-энергии от передатчика до антенн, размещенных в лопастях вертолета.
Технический результат изобретения заключается в расширении функциональных возможностей вертолетной радиолокационной станции.
Технический результат достигается за счет того, что вертолетный радиолокационный комплекс содержит радиолокационную станцию, состоящую из двух сканирующих антенных решеток, вращающегося перехода, приемного устройства, задающего генератора, бортового вычислительного комплекса. Отличие от прототипа заключается в том, что радиолокационная станция дополнительно включает два выходных усилителя мощности, второй вращающийся переход, второе приемное устройство, привод по углу места, привод по азимуту, причем все блоки радиолокационной станции, кроме бортового вычислительного комплекса, размещены над втулкой несущего винта вертолета. А также в вертолетный радиолокационный комплекс введены аппаратура опознавания государственной принадлежности, включающая активную фазированную антенную решетку дециметрового диапазона волн правого крыла, активную фазированную антенную решетку дециметрового диапазона волн левого крыла, блок приемозапросчика, блок ответчика, а также специальная цифровая вычислительная машина. Причем первый вход-выход первой фазированной антенной решетки соединен с первым входом-выходом первого вращающегося перехода, второй вход которого соединен с выходом первого усилителя мощности, вход которого соединен с первым выходом задающего генератора. Второй выход первого вращающегося перехода соединен с первым входом первого приемного устройства, второй вход которого соединен со вторым входом задающего генератора, а выход соединен с первым входом бортового вычислительного комплекса. Первый вход-выход второй фазированной антенной решетки соединен с первым входом-выходом второго вращающегося перехода, второй выход которого соединен с первым входом второго приемного устройства, второй вход которого соединен с третьим выходом задающего генератора, а выход соединен с третьим входом бортового вычислительного комплекса. Второй вход второго вращающегося перехода соединен с выходом второго усилителя мощности, вход которого соединен с четвертым выходом задающего генератора, пятый выход которого соединен с первым входом аппаратуры опознавания государственной принадлежности и вторым входом бортового вычислительного комплекса, пятый вход которого соединен с выходом аппаратуры опознавания государственной принадлежности. Второй вход первой фазированной антенной решетки посредством шины соединен со вторым входом второй фазированной антенной решетки, входом привода по углу места, входом привода по азимуту, входом задающего генератора, четвертым входом бортового вычислительного комплекса, вторым входом аппаратуры опознавания государственной принадлежности и является входом бортового радиоэлектронного оборудования (БРЭО). Шестой вход-выход бортового вычислительного комплекса соединен с входом-выходом специализированной цифровой вычислительной машины, входы-выходы активной фазированной антенной решетки дециметрового диапазона волн правого крыла и активной фазированной антенной решетки дециметрового диапазона волн левого крыла соединены с входом-выходом приемозапросчика.
На чертеже представлена структурная схема вертолетного радиолокационного комплекса, где
1 - радиолокационная станция (РЛС);
2 - аппаратура определения государственной принадлежности;
3 - специализированная цифровая вычислительная машина (СЦВМ).
В состав РЛС входят:
4 - первая фазированная антенная решетка (ФАР-1);
5 - вторая фазированная антенная решетка (ФАР-2);
6 - первый вращающийся переход;
7 - второй вращающийся переход;
8 - первое приемное устройство (ПУ-1);
9 - второе приемное устройство (ПУ-2);
10 - первый выходной усилитель мощности (ВУМ-1);
11 - второй выходной усилитель мощности (ВУМ-2);
12 - задающий генератор;
13 - бортовой вычислительный комплекс (БВК);
14 - привод по углу места;
15 - привод по азимуту.
В состав аппаратуры государственного опознавания входят:
16 - активная фазированная антенная решетка дециметрового диапазона волн правого крыла (АФАР правая);
17 - активная фазированная антенная решетка дециметрового диапазона волн левого крыла (АФАР левая);
18 - блок приемозапросчика;
19 - блок ответчика.
Вертолетный радиолокационный комплекс работает в нескольких режимах:
- Обзор земной поверхности (ОЗП).
- Обзор воздушного пространства (ОВП).
- Маловысотный полет (МВП).
- Обнаружения опасных для полета метеообразований.
- Пеленгация.
- Определение государственной принадлежности объектов, обнаруженных радиолокационным или другим не радиолокационным средством обнаружения.
- Наложение радиолокационного изображения земной поверхности на карту местности.
Для осуществления вышеуказанных режимов работы вертолетный радиолокационный комплекс включает: радиолокационную станцию (РЛС) 1, аппаратуру определения государственной принадлежности 2, СЦВМ 3.
РЛС конструктивно состоит из двух частей. Одна часть размещена над втулкой несущего винта вертолета, другая часть - в фюзеляже. Первая часть в свою очередь имеет подвижную платформу и неподвижную. На подвижной платформе находятся ФАР-1, ФАР-2, вращающиеся переходы 1 и 2, задающий генератор, ВУМ-1, ВУМ-2, ПУ-1, ПУ-2 и привод по углу места. На неподвижной платформе находится привод по азимуту. В фюзеляже вертолета расположены БВК, СЦВМ, блок приемозапросчика и блок ответчика аппаратуры опознавания государственной принадлежности. АФАР правая и АФАР левая располагаются на соответствующих крыльях (пилонах) вертолета.
Размещение одной части РЛС над втулкой несущего винта вертолета дает тактические преимущества и повышение живучести вертолета. Прячась в складках холмистой местности или за листвой деревьев, вертолет поднимает над ними только часть РЛС, расположенную в его надвтулочной части, а сам в это время может оставаться невидимым для противника. В этом случае РЛС может получать РЛИ обозреваемого пространства и обеспечить пилотов информацией о наблюдаемых воздушных и наземных объектах. Минимальное время получения информации составляет одну секунду. За это время трудно обнаружить вертолет, который к тому же после получения информации может изменить свое местопребывание, что значительно затруднит противнику возможность принятия мер к его уничтожению.
Радиолокационная станция 1 включает первую фазированную антенную решетку миллиметрового диапазона волн (ФАР-1) 4, которая осуществляет прием зондирующего сигнала и излучение его в пространство, формирование формы диаграммы направленности в одной или двух плоскостях (азимутальной и угломестной) на излучение и прием, электронное управление положением диаграммы направленности в одной или двух плоскостях, формирование суммарной и разностной диаграмм направленности в одной или двух плоскостях на прием, а также выдачу сигналов суммарной и разностной диаграмм направленности по азимуту или углу места с разделением по времени.
РЛС 1 также содержит вторую фазированную антенную решетку сантиметрового диапазона волн (ФАР-2) 5, предназначенную для приема зондирующего сигнала и излучения его в пространство, формирования формы диаграммы направленности в одной или двух плоскостях (азимутальной и угломестной) на излучение и прием, электронного управления положением диаграммы направленности в одной или двух плоскостях, приема отраженных сигналов от объектов, формирования суммарной и разностной диаграмм направленности в одной или двух плоскостях, выдачи сигналов суммарной и разностной диаграмм направленности по азимуту или углу места с разделением по времени.
Для канализации энергии миллиметрового и сантиметрового диапазонов волн с подвижной части РЛС 1 на неподвижную и наоборот используют первый вращающийся переход миллиметрового диапазона волн 6 и второй вращающийся переход сантиметрового диапазона волн 7.
Первое приемное устройство миллиметрового диапазона волн (ПУ-1) 8, входящее в состав РЛС 1, выполняет функции приема от ФАР-1 отраженных сигналов от объектов по разностному и суммарному каналам, защиту входных цепей устройства от мощного зондирующего сигнала, усиления, фильтрации и двойного преобразования по частоте с выдачей сигнала на второй промежуточной частоте на аналоговые цифровые преобразователи в БВК.
Второе приемное устройство сантиметрового диапазона волн (ПУ-2) 9 выполняет функции приема от ФАР-2 отраженных сигналов от объектов по разностному и суммарному каналам, защиту входных цепей устройства от мощного зондирующего сигнала, усиления, фильтрации и двойного преобразования по частоте с выдачей сигнала на второй промежуточной частоте на аналоговые цифровые преобразователи в БВК.
Первый выходной усилитель мощности (ВУМ-1) 10 предназначен для усиления до необходимой мощности сигнала задающего генератора, формирования зондирующего сигнала миллиметрового диапазона волн для ФАР-1 по форме (длительности импульса и его фронтов, форме вершины).
Второй выходной усилитель мощности (ВУМ-2) 11 предназначен для усиления до необходимой мощности сигнала задающего генератора, формирования зондирующего сигнала сантиметрового диапазона волн для ФАР-2 по форме (длительности импульса и его фронтов, форме вершины).
Задающий генератор 12 предназначен для формирования непрерывного синусоидального сигнала опорной частоты для БВК и аппаратуры определения государственного опознавания при работе ее в радиолокационном режиме, формирования когерентного сигнала миллиметрового и сантиметрового диапазонов волн с амплитудной, фазовой модуляцией сигнала с перестройкой частоты от импульса к импульсу для выходных усилителей мощности миллиметрового 10 и сантиметрового 11 диапазонов волн, формирования когерентных сигналов первого и второго гетеродинов для приемных устройств миллиметрового 8 и сантиметрового 9 диапазонов волн, приема и выдачи сигналов управления устройствами РЛС 1 по цифровой линии связи.
Бортовой вычислительный комплекс (БВК) 13 осуществляет преобразование в цифровую форму выходных аналоговых сигналов приемного устройства суммарного и разностного каналов миллиметрового и сантиметрового диапазонов волн, преобразование в цифровую форму выходного аналогового сигнала дециметрового диапазона волн, выдачу импульсных сигналов для формирования зондирующих сигналов в миллиметровом, сантиметровом и дециметровом диапазонах волн, выдачу импульсных сигналов для синхронизации по времени работы устройств РЛС, прием от БРЭО и выдачу в устройства РЛС информации по цифровым каналам связи, выдачу в БРЭО информации РЛС по цифровым каналам связи, выполнение управляющей функции РЛС во всех режимах ее работы, цифровую обработку принятых сигналов миллиметрового, сантиметрового и дециметрового диапазонов в соответствии с алгоритмами обработки, формирование радиолокационного изображения (РЛИ) обозреваемого пространства и выдачу в БРЭО и на СЦВМ, обработку первичной информации РЛС 1, формирование и передачу в БРЭО координат, выбранных для сопровождения целей, определение степени опасности целей, классификацию типа целей.
Электромеханический привод по углу места 14 предназначен для выдачи в БВК 13 по цифровой линии связи текущего положения подвижной части РЛС 1 и установки подвижной платформы РЛС 1 в заданное направление по углу места.
Электромеханический привод по азимуту 15 предназначен для выдачи в БВК 13 по цифровой линии связи текущего положения подвижной платформы РЛС 1 и установки ее в заданное направление по азимуту или организации кругового вращения аппаратуры, размещенной на подвижной платформе.
Аппаратура определения государственной принадлежности 2 в радиолокационном режиме формирует, усиливает и излучает через активные фазированные антенные решетки дециметрового диапазона волн (АФАР L) правого крыла вертолета 16 и левого крыла вертолета 17 зондирующие сигналы, формируемые из опорного сигнала задающего генератора 12 РЛС 1.
Принятые активными фазированными антенными решетками дециметрового диапазона волн (АФАР правая) правого 16 крыла вертолета и левого (АФАР левая) 17 крыла вертолета, отраженные от радиоконтрастных воздушных и наземных объектов сигналы передаются на вход БВК 13 РЛС 1 для дальнейшей обработки и выдачи РЛИ пространства в БРЭО вертолета.
Блок приемозапросчика 18 предназначен для формирования и излучения запросных сигналов в сторону летательного аппарата, государственную принадлежность которого необходимо определить, а также приема и обработки ответных сигналов этого же летательного аппарата.
Блок ответчика 19 предназначен для приема и обработки запросных сигналов, формирования и излучения ответных сигналов в направление прихода запросного сигнала.
Вертолетный радиолокационный комплекс (ВРК) работает следующим образом.
В режиме обзора земной поверхности (ОЗП) ФАР-1 осуществляет электронное сканирование луча по азимуту в заданном БВК секторе на земной поверхности. Изменение положения сектора сканирования по углу места осуществляет привод по углу места по информации БВК. Зондирующий сигнал, сформированный в задающем генераторе, усиливается по мощности в ВУМ-1 и через вращающийся переход 1 канализируется в ФАР-1, которая излучает его в открытое пространство. Отраженные от наземных объектов сигналы принимаются ФАР-1, которая разделяет сигнал на суммарный и разностный в угломестной плоскости. Далее эти два сигнала через вращающийся переход 1 поступают на два входа ПУ-1, в котором усиливаются, подвергаются двукратному преобразованию по частоте с необходимым усилением и поступают на соответствующие (суммарный и разностный) входы БВК. В БВК поступившие по двум каналам сигналы преобразуются в цифровой код. Сигнал суммарного канала участвует в формировании матрицы информации «угловое положение по азимуту - номер строба по дальности». В каждом стробе дальности определяется амплитуда сигнала, который подвергается когерентной, некогерентной обработке и допплеровской фильтрации с целью выделения движущихся наземных целей. После указанной обработки модуль графического процессора БВК формирует радиолокационное изображение (РЛИ) местности в координатах «азимут-дальность». РЛИ, полученное таким образом, БВК по цифровой линии связи отправляет на многофункциональный индикатор пилота (МФИ), на котором высвечиваются, по выбору пилота, подвижные или неподвижные или одновременно подвижные и неподвижные объекты. В БВК имеется возможность определять и выдавать в БРЭО вертолета точные координаты выбранных пилотом объектов, число которых может достигать четырех, т.е. БВК осуществляет программно-координатное сопровождение до четырех целей.
В режиме обзора воздушного пространства (ОВП) ФАР-2 сканирует лучом воздушное пространство по азимуту в секторе, установленном пилотом. Изменение положения сектора сканирования по углу места осуществляет привод по углу места по информации БВК. Зондирующий сигнал, сформированный в задающем генераторе, усиливается по мощности в ВУМ-2 и через вращающийся переход 2 канализируется в ФАР-2, которая излучает его в открытое пространство. Отраженные от воздушных объектов сигналы принимаются ФАР-2, которая разделяет сигнал на суммарный и разностный в угломестной плоскости. Далее эти два сигнала через вращающийся переход 2 поступают на два входа ПУ-2, в котором усиливаются, подвергаются двукратному преобразованию по частоте с необходимым усилением и поступают на соответствующие (суммарный и разностный) входы БВК. В БВК поступившие по двум каналам сигналы преобразуются в цифровой код. Сигнал суммарного канала участвует в формировании матрицы информации «угловое положение по азимуту - номер строба по дальности». В каждом стробе дальности определяется амплитуда сигнала, который подвергается когерентной, некогерентной обработке и допплеровской фильтрации с целью выделения движущихся воздушных целей. После указанной обработки модуль графического процессора БВК формирует радиолокационное изображение (РЛИ) воздушного пространства в координатах «азимут-дальность». РЛИ, полученное таким образом, БВК по цифровой линии связи отправляет на многофункциональный индикатор пилота, на котором высвечиваются обнаруженные воздушные цели в заданном секторе обзора. В БВК имеется возможность определять и выдавать в БРЭО траектории движения воздушных целей с определением их опасности по определенному алгоритму.
В режиме маловысотного полета (МВП) ФАР-1 осуществляет электронное сканирование луча по азимуту в заданном БВК секторе воздушного пространства. Угол места сектора равен при этом нулю, относительно горизонта. Формирование зондирующего сигнала, его излучение, прием и обработку осуществляют теми же устройствами, что и в режиме ОЗП. Поступившие суммарный и разностный сигналы в БВК подвергаются в нем обработке по определенным алгоритмам, в результате которой БВК выдает в БРЭО вертолета РЛИ обозреваемого воздушного пространства в координатах «азимут-дальность», при этом на экране высвечиваются разным цветом обнаруженные объекты в зависимости от высоты нахождения их относительно высоты полета вертолета. Кроме того, разностный сигнал используется для определения верхней границы (вершин) препятствий. Применение миллиметрового диапазона волн в режиме МВП позволяет обнаруживать провода линий электропередач.
В режиме обнаружения опасных для полета метеообразований ФАР-2 осуществляет электронное сканирование луча по азимуту в заданном БВК секторе воздушного пространства, угол места сектора задает пилот. Формирование зондирующего сигнала, его излучение, прием и обработку осуществляют теми же устройствами, что и в режиме ОВП. Поступивший суммарный сигнал в БВК подвергается обработке по определенным алгоритмам, в результате которой БВК выдает в БРЭО вертолета РЛИ обозреваемого воздушного пространства в координатах «азимут-дальность» с отображением разным цветом интенсивности метеообразований, по которым пилот определяет опасные для полета метеообразования.
В режиме «пеленгация» может быть задействована аппаратура миллиметрового диапазона (ФАР-1, ВУМ-1, ПУ-1, вращающийся переход 1) или аппаратура сантиметрового диапазона (ФАР-2, ВУМ-2, ПУ-2, вращающийся переход 2). Задающий генератор и БВК выполняют свою роль как при работе аппаратуры миллиметрового диапазона, так и при работе аппаратуры сантиметрового диапазона волн. Процесс формирования, излучения и приема сигнала аналогичен процессу формирования, излучения и приема сигнала ОЗП или ОВП со следующими отличиями:
- ФАР устанавливает луч на объект, координаты которого надо точно измерить;
- БВК принимает, обрабатывает сигналы суммарного и разностных каналов по азимуту и углу места и выдает в цифровом виде отклонения максимума диаграммы направленности от направления на объект наблюдения (ошибку пеленгации) по азимуту и углу места на привод по азимуту и углу места, соответственно. Приводы по азимуту и углу места перемещают ФАР таким образом, чтобы ошибка пеленгации была равна нулю;
- БВК рассчитывает и выдает в БРЭО по цифровой линии связи координаты (дальность, азимут, угол места и скорость) объекта наблюдения в системе координат вертолета.
Аппаратура определения государственной принадлежности работает в двух режимах - режиме определения государственной принадлежности объектов и радиолокационном режиме обнаружения наземных и воздушных объектов.
Режим определения государственной принадлежности объектов, обнаруженных радиолокационным или другим не радиолокационным средством обнаружения вертолета, включен на вертолете постоянно. В этом режиме ответчик принимает своей антенной системой запросные сигналы, преобразовывает их в форму, необходимую для оптимальной обработки, по результатам которой формируют и излучают в пространство ответный сигнал, соответствующий запросному. При обнаружении РЛС или другим не радиолокационным средством вертолета объекта, государственную принадлежность которого необходимо определить, блок приемозапросчика формирует запросный сигнал. Запросный сигнал излучают посредством АФАР правого или левого крыла в секторе сканирования лучом. Ответный сигнал объекта на запросный принимает АФАР, через которую он был излучен, канализируется в блок приемозапросчика для преобразования и сравнения с эталонным. По результатам сравнения ЦВМ блока приемозапросчика принимает решение «свой» или «чужой» объект ответил на запросный сигнал, эта информация выдается по цифровой линии связи на многофункциональный индикатор (МФИ) пилота.
В режиме радиолокационного обнаружения объектов аппаратура определения государственной принадлежности прекращает по команде БРЭО вертолета, которую БВК транслирует в блок приемозапросчика, формирование запросных сигналов. В этом случае из сигнала опорной частоты задающего генератора 12 блок приемозапросчика 18 формирует зондирующий сигнал, который через АФАР правую или левую излучается в пространство. Отраженный сигнал от воздушного или наземного объекта принимается АФАР левого и правого крыла, далее сигнал преобразовывается в форму, удобную для обработки в БВК 13, на вход которого он поступает. В БВК отраженный сигнал обрабатывается по тем же алгоритмам, что и сигнал, поступивший в БВК и принятый АФАР-1 или АФАР-2. Результат обработки отраженного сигнала в виде РЛИ пространства передается БВК 13 по цифровой линии связи в БРЭО вертолета для отображения на МФИ пилота.
Режим наложения радиолокационного изображения земной поверхности на карту местности включается ВРК автоматически с включением режима ОЗП. В этом случае специализированная ЦВМ 3 по определенным алгоритмам накладывает РЛИ, полученное РЛС в режиме ОЗП, на карту местности, которая хранится в памяти специализированной ЦВМ. Результат наложения по цифровым каналам связи передается в БРЭО для дальнейшего использования.
Максимальный сектор электронного сканирования по азимуту у ФАР-1 и ФАР-2 равен 90° градусам. Размер сектора сканирования выбирается экипажем вертолета, кроме случая, когда включается режим маловысотного полета (МВП). В этом случае сектор электронного сканирования автоматически устанавливается равным 15° при задании режима. Для защиты от метеонагрузок, уменьшения механических и климатических воздействий, улучшения аэродинамических свойств фазированные антенные решетки ФАР-1 и ФАР-2 установлены под одним радиопрозрачным обтекателем на подвижной платформе, которая имеет возможность перемещаться по углу места и по азимуту с помощью электромеханических приводов 14, 15. По углу места ФАР-1 и ФАР-2 перемещаются в диапазоне углов от минус 30° (вниз) до плюс 12° (вверх). С помощью привода по азимуту 15 возможна установка ФАР-1 и ФАР-2 на любой угол в диапазоне 0-360° градусов, вместе с тем имеется возможность непрерывного кругового вращения ФАР-1 и ФАР-2 со скоростью до 180° в секунду. Влияние лопастей на прием отраженного сигнала устраняется алгоритмическим способом в БВК 13 методом синхронизации (исключения) приема сигнала с движением лопастей в зоне электронного сканирования лучом. С целью устранения паразитной яркостной модуляции радиолокационного изображения (РЛИ) за счет выключения приема сигнала на время нахождения лопасти в луче замещаются «пораженные» участки РЛИ соседними участками «непораженными», т.е. где отраженный сигнал от цели присутствует.
Включение в предлагаемый вертолетный радиолокационный комплекс аппаратуры опознавания государственной принадлежности, которая наряду с решением задач опознавания государственной принадлежности обнаруженных любым способом целей имеет возможность обнаруживать радиоконтрастные объекты радиолокационным способом, позволит иметь информацию о целях в дециметровом диапазоне волн. Это обстоятельство позволяет иметь возможность обнаруживать цели, обнаружение которых невозможно в миллиметровом и сантиметровом диапазонах, например цели, замаскированные дерном, травой и т.д.
При выборе экипажем вертолета радиолокационного режима работы аппаратуры госопознавания непрерывный синусоидальный сигнал опорной частоты со второго выхода задающего генератора поступает в аппаратуру опознавания государственной принадлежности, где производится перенос его в дециметровый диапазон частот, вводится необходимая модуляция в соответствии с законом, определенным функциональным программным обеспечением БВК 13, усиление до необходимой мощности, излучение в пространство и прием с помощью правой АФАР 16 и левой АФАР 17, установленных на крыльях (пилонах) вертолета. Фильтрация, усиление и преобразование отраженного сигнала от цели на промежуточную частоту осуществляется штатными устройствами аппаратуры опознавания государственной принадлежности. Выделенный сигнал таким способом с выхода аппаратуры опознавания государственной принадлежности поступает на пятый вход БВК 13 для аналого-цифровой обработки с целью решения задачи обнаружения и представления информации на экран МФИ в форме, удобной для экипажа. Во всех режимах работы РЛС 1, кроме режима обнаружения опасных для полета метеообразований, могут применяться оба диапазона частот - миллиметровый и сантиметровый. В режиме обнаружения метеообразований применяется только сантиметровый диапазон волн.
На вторые входы ФАР-1 и ФАР-2 по цифровому каналу связи с БВК 13 поступает информация об установке луча электронным способом в необходимую угловую позицию сектора обзора по азимуту, максимальный размер которого может достигать 90°. Отраженные сигналы принимаются ФАР-1 или ФАР-2. С первого выхода каждой ФАР суммарный сигнал поступает на первые входы ПУ-1 или ПУ-2, соответственно, а со вторых выходов каждой ФАР коммутируемые сигналы разностных угловых каналов по азимуту и углу места поступают на вторые входы ПУ-1 и ПУ-2. В ПУ-1 или ПУ-2 поступившие сигналы подвергаются фильтрации, двукратному преобразованию в сигнал промежуточной частоты и необходимому усилению по амплитуде. С первого выхода ПУ-1 суммарный сигнал поступает на первый вход БВК 13, со второго выхода ПУ-1 разностный сигнал поступает на второй вход БВК 13. В БВК 13 происходит соответствующая обработка поступивших сигналов, результатом которой в различных режимах РЛС 1 могут быть радиолокационное изображение местности и метеообразований, информация об обнаруженных подвижных наземных и воздушных целях и их параметрах движения. С выхода БВК 13 необходимая информация в цифровом виде по каналу связи поступает в БРЭО вертолета. С первого выхода ПУ-2 суммарный сигнал поступает на третий вход БВК 13, со второго выхода ПУ-2 разностный сигнал поступает на четвертый вход БВК 13. В БВК 13 происходит соответствующая обработка поступивших сигналов, результатом которой является радиолокационное изображение местности, информация об обнаруженных подвижных наземных и воздушных целях и их параметрах движения, в т.ч. информация об опасных для полета метеообразованиях, их интенсивности и дальности до них. С выхода БВК необходимая информация в цифровом виде по каналу связи поступает в БРЭО вертолета.
Предлагаемая схема построения вертолетного радиолокационного комплекса позволяет расширить его функциональные возможности по обнаружению и измерению координат воздушных и наземных объектов, искусственных и естественных препятствий, опасных для полета метеообразований, определению государственной принадлежности обнаруженных объектов, наложению радиолокационного изображения на карту местности. Вместе с тем предлагаемое размещение части блоков РЛС над втулкой несущего винта вертолета повысит его безопасность.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДИАПАЗОННЫЙ ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2497145C1 |
| Многофункциональный бортовой радиолокационный комплекс | 2017 |
|
RU2670980C9 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2289825C2 |
| Наземный радиолокационный обнаружитель | 2017 |
|
RU2714450C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ В ДВУХДИАПАЗОННЫХ РАДИОЛОКАЦИОННЫХ КОМПЛЕКСАХ С АКТИВНЫМИ ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ (АФАР) | 2016 |
|
RU2665032C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КЛАССОВ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ ДЛЯ МНОГОДИАПАЗОННОГО РАЗНЕСЕННОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2020 |
|
RU2741057C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| ПЕРЕНОСНАЯ МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СЕКТОРНОГО ОБЗОРА ПРОСТРАНСТВА | 2024 |
|
RU2832851C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ВЫСОКОГО РАЗРЕШЕНИЯ С АКТИВНОЙ ФАЗИРОВАННОЙ РЕШЕТКОЙ ДЛЯ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2429990C1 |
Изобретение относится к области радиолокации и может быть использовано на вертолетах. Достигаемый технический результат изобретения - расширение функциональных возможностей вертолетной радиолокационной станции. Данный результат достигается за счет того, что вертолетный радиолокационный комплекс содержит радиолокационную станцию, состоящую из двух сканирующих антенных решеток, вращающегося перехода, приемного устройства, задающего генератора, бортового вычислительного комплекса. Отличие от прототипа заключается в том, что радиолокационная станция дополнительно включает два выходных усилителя мощности, второй вращающийся переход, второе приемное устройство, привод по углу места, привод по азимуту, причем все блоки радиолокационной станции, кроме бортового вычислительного комплекса, размещены над втулкой несущего винта вертолета. А также в вертолетный радиолокационный комплекс введены аппаратура опознавания государственной принадлежности, включающая активную фазированную антенную решетку дециметрового диапазона волн правого крыла, активную фазированную антенную решетку дециметрового диапазона волн левого крыла, блок приемозапросчика, блок ответчика, а также специализированная цифровая вычислительная машина. 1 ил.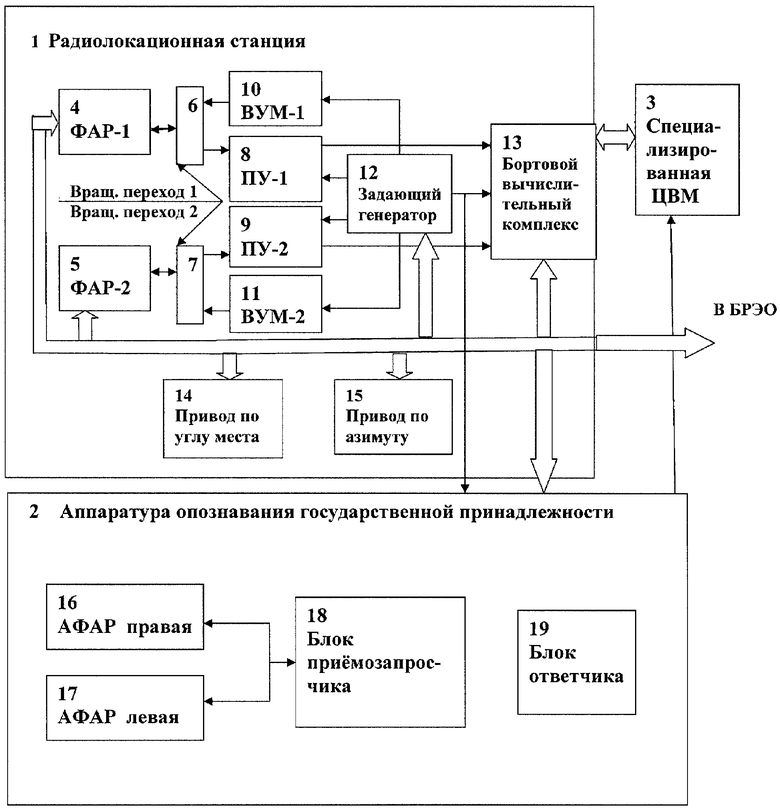
Вертолетный радиолокационный комплекс, содержащий радиолокационную станцию, состоящую из двух сканирующих антенных решеток, вращающегося перехода, приемного устройства, задающего генератора, бортового вычислительного комплекса, отличающийся тем, что радиолокационная станция дополнительно включает два выходных усилителя мощности, второй вращающийся переход, второе приемное устройство, привод по углу места, привод по азимуту, причем все блоки радиолокационной станции, кроме бортового вычислительного комплекса, размещены над втулкой несущего винта вертолета, а также в него введены аппаратура опознавания государственной принадлежности, включающая активную фазированную антенную решетку дециметрового диапазона волн правого крыла, активную фазированную антенную решетку дециметрового диапазона волн левого крыла, блок приемозапросчика, блок ответчика, а также специализированная цифровая вычислительная машина, причем первый вход-выход первой фазированной антенной решетки соединен с первым входом-выходом первого вращающегося перехода, второй вход которого соединен с выходом первого усилителя мощности, вход которого соединен с первым выходом задающего генератора, второй выход первого вращающегося перехода соединен с первым входом первого приемного устройства, второй вход которого соединен со вторым выходом задающего генератора, а выход соединен с первым входом бортового вычислительного комплекса, первый вход-выход второй фазированной антенной решетки соединен с первым входом-выходом второго вращающегося перехода, второй выход которого соединен с первым входом второго приемного устройства, второй вход которого соединен с третьим выходом задающего генератора, а выход соединен с третьим входом бортового вычислительного комплекса, второй вход второго вращающегося перехода соединен с выходом второго усилителя мощности, вход которого соединен с четвертым выходом задающего генератора, пятый выход которого соединен с первым входом аппаратуры опознавания государственной принадлежности и вторым входом бортового вычислительного комплекса, пятый вход которого соединен с выходом аппаратуры опознавания государственной принадлежности, второй вход первой фазированной антенной решетки посредством шины соединен со вторым входом второй фазированной антенной решетки, входом привода по углу места, входом привода по азимуту, входом задающего генератора, четвертым входом бортового вычислительного комплекса, вторым входом аппаратуры опознавания государственной принадлежности, и является входом бортового радиоэлектронного оборудования, предназначенного для передачи радиолокационного изображения пространства на многофункциональный индикатор пилота вертолета, шестой вход-выход бортового вычислительного комплекса соединен с входом-выходом специализированной цифровой вычислительной машины, входы-выходы активной фазированной антенной решетки дециметрового диапазона волн правого крыла и активной фазированной антенной решетки дециметрового диапазона волн левого крыла соединены с входом-выходом приемозапросчика.
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2256939C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| ИНТЕГРИРОВАННЫЙ БОРТОВОЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ВЕРТОЛЕТА | 2002 |
|
RU2204504C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2289825C2 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| US 6577264 А, 10.06.2003 | |||
| US 6128554 А, 03.10.2003 | |||
| Приспособление для механического решения уравнений | 1926 |
|
SU13040A1 |

